Изобретение относится к неразрушающему контролю и может быть использовано для визуального и измерительного контроля внутренних полостей различных объектов типа сосудов высокого давления, емкостей для хранения различных газов и жидкостей и т.п.
В настоящее время большое значение приобретает оценка размеров дефектов для определения степени износа объектов и их остаточного ресурса [1]. Она производится с помощью окулярных шкал, цена их деления определяется масштабом изображения дефекта при конкретном расстоянии от контролируемой поверхности до объектива эндоскопа с известным фокусным расстоянием от контролируемой поверхности до объектива.
Расстояние до объекта при этом оценивается с помощью дальномера триангуляционного типа [2, 3] либо по расстоянию между изображениями двух параллельных лучей, направляемых на объект [4].
Недостаток дальномера триангуляционного типа - нелинейная шкала и невысокая точность измерения при расстояниях до объекта, значительно превышающих базу дальномера, располагаемую внутри эндоскопа.
Недостаток дальномера с параллельными лучами - также невысокая точность измерения при расстояниях, существенно превышающих расстояние между лучами.
Вместе с тем, многие объекты современной техники требует измерения внутренних размеров полостей, значительно превышающих диаметр входного отверстия (изделий типа шар-баллонов и т.п.).
Цель изобретения - устранение этих недостатков и повышение точности оценки размеров дефектов при расстояниях до контролируемых поверхностей, значительно превышающих диаметр корпуса эндоскопа, а также обеспечение возможности измерения координат расположения дефектов на поверхности изделия.
Для этого стандартный эндоскоп бокового обзора, содержащий систему подсветки объекта и систему его наблюдения с измерительной шкалой, дополнительно снабжается втулкой, имеющей возможность поступательного движения и вращения относительно оси симметрии фланца, закрепляемого на входном отверстии контролируемой полости, на боковой поверхности втулки вдоль ее образующей нанесена линейная шкала для отсчета величины ее перемещения относительно фланца, на торцевой поверхности фланца нанесена угловая шкала для отсчета угла поворота втулки относительно фланца, во втулке установлена трубка с оптической системой лазерной подсветки объекта, содержащая микролазер и зеркало, трубка установлена во втулке с возможностью линейного перемещения относительно эндоскопа параллельно его продольной оси, угол γ наклона лазерного луча, отражаемого от зеркала, установленного перед микролазером, к продольной оси эндоскопа выбирается из условия γ=arctg(ΔH/Co), где ΔH - точность измерения расстояния до объекта, Со - цена деления шкалы микрометрического механизма перемещения трубки, минимальное измеряемое расстояние до объекта определяется по соотношению  где С - расстояние между продольной осью эндоскопа и продольной осью трубки с системой лазерной подсветки, А - размер линейного поля зрения объектива эндоскопа в плоскости изображения, ƒ' - фокусное расстояние объектива эндоскопа, максимальное значение измеряемого устройством расстояния до объекта определяется по формуле Hmax≤b·tgγ, где b - величина перемещения трубки с системой лазерной подсветки с помощью микрометренного механизма.
где С - расстояние между продольной осью эндоскопа и продольной осью трубки с системой лазерной подсветки, А - размер линейного поля зрения объектива эндоскопа в плоскости изображения, ƒ' - фокусное расстояние объектива эндоскопа, максимальное значение измеряемого устройством расстояния до объекта определяется по формуле Hmax≤b·tgγ, где b - величина перемещения трубки с системой лазерной подсветки с помощью микрометренного механизма.
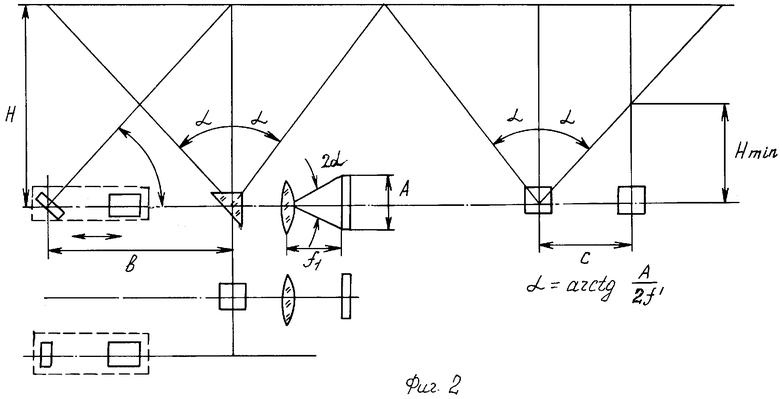
Конструктивная схема устройства показана на фиг.1. На фиг.2 показана его оптическая схема.
Устройство содержит стандартный эндоскоп бокового обзора 6, который устанавливается во втулке 4. Устройство содержит втулку 5 с двумя отверстиями, оси которых параллельны продольной оси симметрии втулки. На боковой поверхности втулки вдоль ее образующей нанесена линейная шкала 7, по которой отсчитывается ее линейное перемещение относительно фланца 2, который крепится на входном отверстии объекта 1. На торцевой поверхности фланца нанесена круговая шкала 4, по которой отсчитывается угол поворота втулки 5 во фланце 2. Стопор 3 служит для закрепления втулки 5 во фланце 2 в необходимом положении.
В одном из отверстии втулки 5 установлен стандартный эндоскоп 6 боковою обзора, ось визирования которого перпендикулярна его продольной оси. Эндоскоп имеет каналы подсветки объекта 14 и его наблюдения 15, который состоит из объектива, прямоугольной призмы и шкалы. Изображение объекта наблюдается в окуляре или на дисплее 8 (в случае применения видеоэндоскопа).
Во втором отверстии втулки 5 установлена трубка 7 с каналом лазерной подсветки объекта, состоящим из полупроводникового лазера и установленного перед ним под углом (90°-γ/2) зеркала. При этом лазерный луч на выходе этой системы распространяется в плоскости, параллельной плоскости, проходящей через продольную ось эндоскопа и его ось визирования, и наклонен к продольной оси эндоскопа под углом γ. Трубка с системой лазерной подсветки перемещается с помощью микрометренного механизма 11 со шкалой 13, закрепленного на кронштейне 12, связанного со втулкой 5. На трубке установлена возвратная пружина 9 и ограничительное кольцо 10 для устранения люфта при ее перемещениях. Трубка с системой лазерной подсветки перемещается строго параллельно продольной оси эндоскопа. Для предотвращения ее поворотов в отверстии втулки 5 применяется стандартная система типа "шпонька-шлиц" (не показана).
Устройство работает следующим образом.
На входном отверстии контролируемой полости закрепляется фланец, в котором установлена втулка с эндоскопом и расположенной параллельно ему трубкой с системой лазерной подсветки.
Перемещая втулку относительно фланца, оператор наблюдает внутреннюю поверхность контролируемой полости. При обнаружении дефекта, вращая втулку и перемещая ее относительно фланца, его изображение приводят к центру поля зрения эндоскопа и определяют его полярные координаты на контролируемой поверхности относительно базовой системы координат, например, относительно торца установочного фланца, снимая отсчеты с его круговой шкалы и линейной шкалы на образующей втулки.
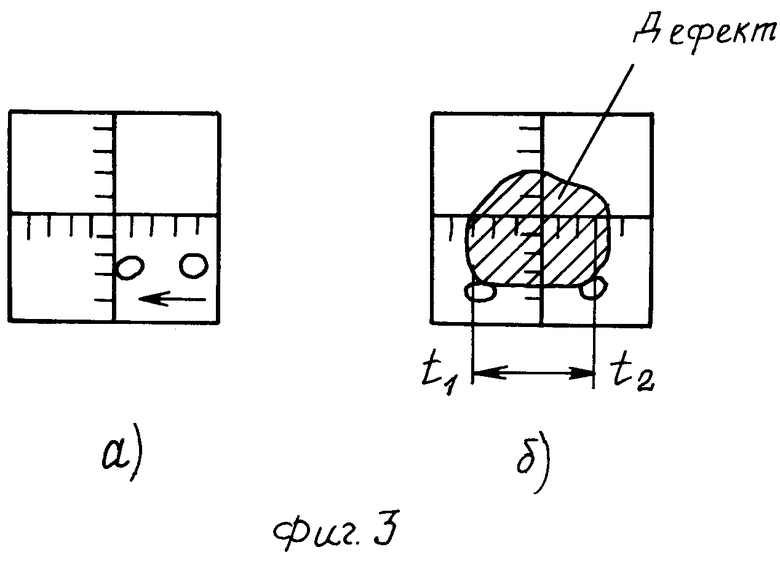
Затем оператор включает микролазер и, наблюдая яркую точку в месте пересечения лазерного луча с контролируемой поверхностью, приводит с помощью микромеханизма ее изображение на линию окулярной шкалы, проходящей через ее центр и расположенной перпендикулярно направлению перемещения трубки с системой лазерной подсветки (фиг.3, а).
В этот момент снимают отсчет с механической или жидкокристаллической шкалы микрометренного механизма и, умножив полученное при этом число делений no на tgγ, вычисляют текущее расстояние до объекта по формуле H=no·tgγ.
За начало отсчета шкалы микрометренного механизма целесообразно принять минимальное измеряемое расстояние до объекта. При этом текущее расстояние до контролируемой поверхности определяется по формуле H=Hmin+no·Co·tgγ.
Масштаб изображения определяется по формуле m=H/ƒ', что справедливо для обычно применяемых в эндоскопах короткофокусных объективов с большой глубиной резкости в плоскости объектов при H≥20÷30ƒ'.
Затем оценивает размер дефекта в плоскости его залегания с помощью окулярной шкалы по соотношению x=n·i·ci·mi, где ni - число делений окулярной шкалы, приходящихся на изображение дефекта, ci - цена деления окулярной шкалы.
В случае протяженных дефектов, изображение которых превышает поле зрения объектива эндоскопа, их размер может быть определен методом последовательного наведения перекрестия окулярной шкалы на края изображения дефекта с помощью перемещения втулки во фланце и вычислением разности взятых по ее шкале отсчетов, т.e. Х=t1-t2 (фиг.3, б).
Отличительная черта устройства - возможность управления точностью измерения расстояния до объекта и диапазоном измеряемых расстояний за счет изменения угла γ наклона зеркала перед микролазером к его оси и/или изменения длины b шкалы микрометренного механизма.
На практике обычно принимают tgγ=10 (γ≈84°30), что упрощает проведение расчетов.
Применяя несложную технику микропроцессорной обработки и микрометренный механизм перемещения трубки с лазерной подсветкой с электронной шкалой и интерфейсом типа RS-232 для связи с компьютером, нетрудно реализовать прибор со шкалами, непосредственно отградуированными в единицах расстояния до объекта и/или в коэффициентах масштаба изображения.
Литература
1. Рождественский Ю.В., Саттаров Д.Н. Волоконная оптика в авиационной и ракетной технике. М.: Машиностроение, 1977, 188 с.
2. Патент США, НКИ 356-1 №3817619.
3. Проспект фирмы Everest, США Shadow Probc, 2002.
4. Патент США, НКИ 356-156 №3730632.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО И ИЗМЕРИТЕЛЬНОГО КОНТРОЛЯ ВНУТРЕННИХ ПОЛОСТЕЙ | 2004 |
|
RU2290626C2 |
| АВТОКОЛЛИМАЦИОННЫЙ ЭНДОСКОП | 2005 |
|
RU2294552C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ ТЕЛ | 2004 |
|
RU2293363C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2004 |
|
RU2261538C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405135C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2413206C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2413932C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405136C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405138C1 |
| ЛАЗЕРНЫЙ СТЕРЕОЭНДОСКОП | 2006 |
|
RU2324958C1 |
Изобретение относится к неразрушающему контролю. Устройство содержит стандартный эндоскоп бокового обзора, содержащий систему подсветки объекта и систему его наблюдения с измерительной шкалой, дополнительно снабжается втулкой с линейной и угловой шкалами, имеющей возможность поступательного движения и вращения относительно оси симметрии фланца, закрепляемого на входном отверстии контролируемой полости. Во втулке установлена трубка с оптической системой лазерной подсветки объекта, содержащая микролазер и зеркало. Трубка установлена во втулке с возможностью линейного перемещения относительно эндоскопа параллельно его продольной оси. Технический результат - повышение точности оценки размеров дефектов при больших расстояниях до контролируемых поверхностей, а также измерения координат расположения дефектов на поверхности контролируемого изделия. 3 ил.
Устройство для визуального и измерительного контроля внутренних полостей, содержащее эндоскоп бокового обзора с измерительной окулярной шкалой, отличающееся тем, что эндоскоп бокового обзора, содержащий систему подсветки объекта и систему его наблюдения с измерительной шкалой, устанавливается во втулке, имеющей возможность поступательного движения и вращения относительно оси симметрии фланца, закрепляемого на входном отверстии контролируемой полости, на боковой поверхности втулки вдоль ее образующей нанесена линейная шкала для отсчета величины ее перемещения относительно фланца, на торцевой поверхности фланца нанесена угловая шкала для отсчета угла поворота втулки относительно фланца, во втулке установлена трубка с оптической системой лазерной подсветки объекта, содержащая микролазер и зеркало, трубка установлена во втулке с возможностью линейного перемещения относительно эндоскопа параллельно его продольной оси с помощью микрометрического механизма, закрепленного на втулке, плоскость распространения лазерного луча параллельна плоскости, образованной осью визирования объектива эндоскопа и его продольной осью, угол γ наклона лазерного луча, отраженного от зеркала, установленного перед микролазером, к продольной оси эндоскопа выбирается из условия γ=arctg(ΔH/C0), где ΔН -точность измерения расстояния до объекта, С0 - цена деления шкалы микрометрического механизма перемещения трубки,
минимальное измеряемое расстояние до объекта определается по соотношению

где С - расстояние между продольной осью эндоскопа и продольной осью трубки с системой лазерной подсветки,
А - размер линейного поля зрения объектива эндоскопа в плоскости изображения,
f' - фокусное расстояние объектива эндоскопа,
максимальное значение измеряемого устройством расстояния до объекта определяется по формуле Нmax≤b·tgγ, где b - величина перемещения трубки с системой лазерной подсветки с помощью микрометренного механизма.
| US 3730632 A, 01.05.1973 | |||
| Устройство для визуального контроля внутренних поверхностей | 1975 |
|
SU616525A1 |
| Устройство для контроля внутренней поверхности тел | 1991 |
|
SU1793210A1 |
| Устройство для визуального контроля внутренних труднодоступных поверхностей объектов | 1981 |
|
SU1052839A1 |

