Изобретение относится к измерительной технике, конкретнее к области электрических и оптических измерений параметров импульсных механических нагрузок в виброакустике и физике быстропротекающих процессов, и может быть использовано для непрерывной регистрации параметров движения вещества в экстремальных условиях.
Известен емкостный датчик для измерений механических перемещений поверхности от времени /Политехнический словарь (под ред. Ишлинского А.Ю.). - М.: Советская энциклопедия, 1989. - 656 с., см. с.167/, представляющий собой измерительный преобразователь в виде электрического конденсатора, емкость которого изменяется пропорционально измеряемому перемещению. Конструктивно емкостный датчик представляет собой плоскопараллельный конденсатор, у которого изменяется зазор между обкладками.
Недостатком известного датчика является низкая частота регистрируемых сигналов, обусловленная относительно большой постоянной времени измерительной цепи, что ограничивает возможности его применения при регистрации быстропротекающих процессов.
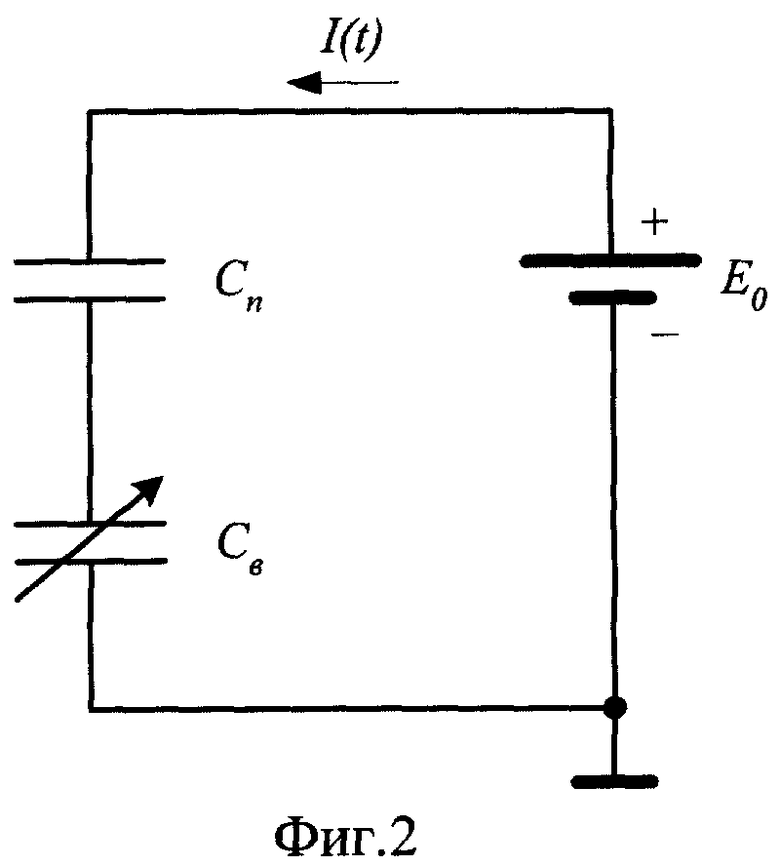
Наиболее близким по технической сущности к заявляемому (прототипом) является емкостный датчик /Иванов А.Г., Новиков С.А. Метод емкостного датчика для регистрации мгновенной скорости движущейся поверхности. ПТЭ, 1963, №1, с.135-138/, предназначенный для непрерывной регистрации скорости поверхности металлических образцов, например, в опытах по исследованию упругопластических волн в стали /см., например, Иванов А.Г., Новиков С.А., Синицин В.А. Исследование упругопластических волн в железе и стали при взрывном нагружении. ФТТ, 1963, №5, с.269-284/. Сущность метода измерения заключается в регистрации импульса емкостного тока I(t) в цепи заряженного предварительно (до напряжения Uо=Ео) измерительного воздушного конденсатора емкостью Св=1-5 пФ и с начальным расстоянием между электродами xо=2-10 мм, подключенного к активному сопротивлению шунта R, равному обычно волновому сопротивлению измерительной линии, через источник постоянного напряжения Ео=600-900 В, при изменении (увеличении) емкости Cв(t) вследствие движения одной из обкладок конденсатора к другой со скоростью W(t) в результате действия сторонней силы, например, ударной волны.
Известный датчик содержит измерительный плоский конденсатор, заполненный воздухом, с неподвижным и подвижным электродами (обкладками), последний из которых представляет собой, например, поверхность исследуемого металлического образца, измерительную линию и цепь питания.
При выполнении условий
R·dCв/dt≪1,
x(t)≪xо,
скорость подвижного электрода определяется соотношением
W(t)=I(t)·xо/Св·Uo=U(t)·xo/Cв·R·Uo=(Uo-Uc(t))·xо/Св·R·Uo,
где x(t) - расстояние (смещение), пройденное подвижным электродом;
U(t)=Uo·R·dCв/dt=I(t)·R - напряжение, измеряемое шунтом R;
Uc(t)=Uo-U(t)=Uo-I(t)·R - напряжение на конденсаторе.
Характерный уровень регистрируемого с помощью шунта сигнала U(t) емкостного датчика составляет несколько десятков милливольт, реальная разрешающая способность - 10-20 нс, характерное время регистрации - единицы или десятки микросекунд /см., например, 1. Методы исследования свойств материалов при интенсивных динамических нагрузках (гл.3. Методы непрерывной регистрации профилей скорости движения вещества.). Монография. Под общ. ред. д-ра физ.-мат. наук М.В.Жерноклетова. - Саров: ФГУП РФЯЦ-ВНИИЭФ, 2003, 403 с., см. с.91; 2. Канель Г.И., Разоренов С.В., Уткин А.В., Фортов В.Е. Ударно-волновые явления в конденсированных средах. М.: Янус-К, 1996, 408 с., см. с.64/. Отметим, что информативным является только начальный участок регистрируемого сигнала U(t), поскольку необходимо выполнить второе из указанных выше условий.
Недостатком прототипа является его низкая помехозащищенность к электромагнитным наводкам, связанная с большой паразитной индуктивностью измерительной линии, проблемой экранирования шунта, а также с низким уровнем измеряемого полезного сигнала и высоким зарядным напряжением измерительного конденсатора. Это ограничивает область его применения.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании помехозащищенного датчика для непрерывной регистрации параметров движения вещества при импульсных нагрузках.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, заключается в повышении помехозащищенности датчика от электромагнитных наводок, расширении его функциональных возможностей и области его применения.
Это достигается тем, что в емкостном датчике, содержащем измерительный плоский конденсатор, заполненный слоем воздуха, с неподвижным и подвижным электродами, измерительную линию и цепь питания, новым является то, что дополнительно введен электромеханический преобразователь в виде плоского пьезоэлемента, один из электродов которого служит неподвижным электродом измерительного конденсатора, при этом емкость пьезоэлемента выбрана значительно больше емкости измерительного конденсатора, а измерительная линия выполнена в виде оптического канала для измерения параметров движения поверхности пьезоэлемента.
Техническая сущность заявляемого датчика заключается в том, что в качестве чувствительного элемента измерительной цепи вместо шунта используется электромеханический преобразователь в виде плоского пьезоэлемента (пьезопреобразователь) с оптическим выходом, конструктивно объединенный с емкостным датчиком без внесения заметных изменений в эквивалентную электрическую цепь последнего. Это обеспечивается за счет электрически последовательного включения пьезопреобразователя с измерительным воздушным конденсатором путем конструктивного совмещения одного из электродов первого с неподвижным электродом второго и выбора достаточно большой величины емкости пьезопреобразователя. Электромеханический пьезопреобразователь функционирует на основе обратного пьезоэффекта и обладает чувствительностью к изменению приложенного электрического поля (напряжения на пьезопреобразователе). В рассматриваемой схеме измерения так же, как и в прототипе, скорость подвижного электрода W(t) прямо пропорциональна величине емкостного тока I(t) в соответствие с приведенными выше соотношениями W(t)=I(t)·xo/Cв·Uo и I(t)=Uo·dCв/dt. Поэтому смещение x(t) подвижного электрода (поверхности образца) связано линейной зависимостью с падением напряжения ΔUn(t) на пьезопреобразователе (пьезоэлементе), а именно ΔUn(t)=Uo·x(t)/·xo при x(t)≪xo. Отметим, что при работе заявляемого емкостного датчика в режиме заданного напряжения Uo=const, в котором работает и прототип, падения напряжения на пьезопреобразователе и воздушном измерительном конденсаторе равны по величине и противоположны по знаку. При этом, так как в электромеханическом пьезопреобразователе при импульсном воздействии временная форма механического напряжения Δσe(t), а следовательно, и скорости свободной поверхности w(t) повторяет временную форму приложенного электрического поля ΔEn(t) /Ультразвуковые пьезопреобразователи для неразрушающего контроля. Под общ. ред. Ермолова И.Н. - М.: Машиностроение, 1986, 280 с./, то смещение x(t) поверхности образца (подвижного электрода) прямо пропорционально скорости w(t) плоской поверхности пьезопреобразователя с электродом в соответствии со следующими соотношениями:
w(t)=Δσe(t)/Zn;
Δσе(t)=e·ΔEn(t) для обратного пьезоэффекта;
ΔEn(t)=ΔUn(t)/δ;
ΔUn(t)=Uo·x(t)/·xo при x(t)≪xo
x(t)=xo·δ·Zn·w(t)/e·Uo,
где Zn - акустистический импеданс пьезоматериала;
e - пьезоконстанта пьезоматериала, е11 для кварца х-среза;
δ - толщина пьезоэлемента.
Скорость поверхности пьезопреобразователя w(t) измеряется интерферометрическими методами с помощью измерительной линии, выполненной в виде оптического канала для измерения параметров движения поверхности пьезоэлемента. Смещение x(t) поверхности образца вычисляется с помощью последнего соотношения путем умножения w(t) на константу. Скорость W(t) поверхности исследуемого образца может быть найдена затем путем дифференцирования зависимости x(t).
Использование в качестве чувствительного элемента измерительной цепи электромеханического пьезопреобразователя позволяет уменьшить паразитную индуктивность цепи разряда (подзарядки) измерительного конденсатора датчика за счет исключения мест соединений шунта с электрической измерительной линией или его самого, а также обеспечить более эффективную защиту датчика от электромагнитных наводок за счет оптимизации конструкции. При этом в заявляемом датчике сопротивление R в эквивалентной схеме будет определяться, очевидно, сопротивлением соединительных проводников или специально выбранного для определенности низкоомного эталонного сопротивления. В прототипе с целью повышения уровня полезного сигнала величина R выбиралась максимально большой и была ограничена величиной волнового сопротивления измерительной линии (высокочастотного кабеля), равного обычно 50 Ом. Отметим, что уменьшение сопротивления R в рассматриваемом методе приводит к повышению его разрешающей способности за счет возможности увеличения допустимой скорости изменения измерительной емкости dCв/dt≪1/R (см. первое из приведенных выше условий).
Положительным фактором при использовании заявляемого датчика является возможность его функционирования в качестве отметчика времени или датчика динамического давления с момента t=Тпр схлопывания воздушного зазора (слоя) в процессе движения подвижного электрода (свободной поверхности образца), определяемого из соотношения х(Тпр)=xо, то есть уже значительно позже (То≪Тпр) процесса регистрации рассматриваемым методом в интервале (t, То), для которого необходимо выполнение условия х(Тo)≪xo. При схлопывании зазора происходит соударение образца с пьезопреобразователем и образование волны сжатия, параметры которой могут быть зарегистрированы. Интерферометрическими методами можно определить моменты входа и выхода волны сжатия по резкому изменению скорости движения свободной поверхности пьезопреобразователя. Это позволяет определить независимым способом среднюю скорость движения поверхности образца на известной базе xo и волновую скорость в пьезопреобразователе, что повышает информативность измерений.
Таким образом, использование предлагаемого изобретения приводит к повышению помехозащищенности датчика от электромагнитных наводок, расширению его функциональных возможностей и области его применения.
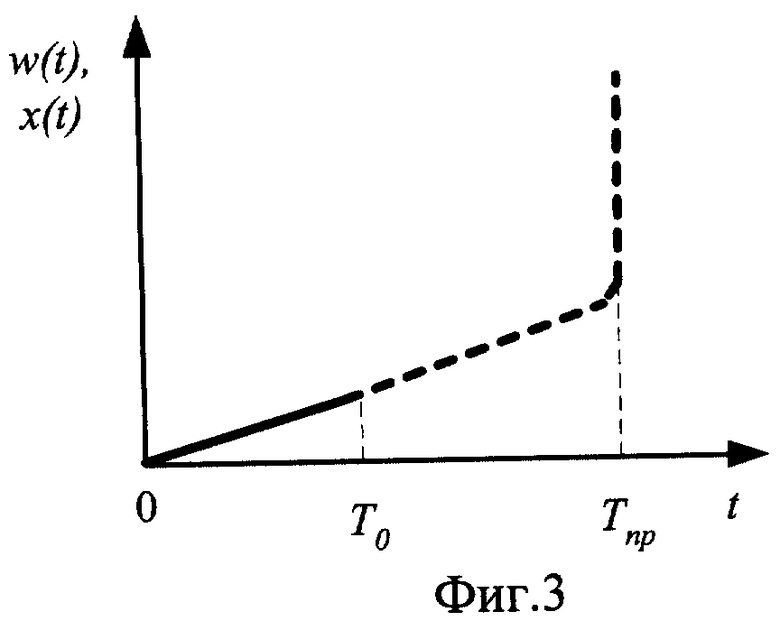
На фиг.1 представлен вариант конструкции заявляемого емкостного датчика и схема постановки эксперимента с нагруженном исследуемого образца ударной волной (УВ). На фиг.2 представлена электрическая схема датчика, поясняющая его работу. На фиг.3 представлена характерная форма совпадающих в относительных единицах временных зависимостей скорости движения поверхности пьезоэлемента w(t) и смещения поверхности исследуемого образца x(t) при воздействии на образец плоской ударной волны с постоянной амплитудой.
Емкостный датчик на фиг.1 содержит корпус 1, измерительный плоский конденсатор 2, заполненный слоем воздуха 3, с неподвижным 4 и подвижным 5 электродами, последний из которых представляет собой поверхность исследуемого образца 6, измерительную линию 7 и цепь питания 8. Дополнительно введен электромеханический преобразователь в виде плоского пьезоэлемента 9, один из электродов (4) которого служит неподвижным электродом. При этом (см. фиг.2) пьезоэлемент 9 оказывается включенным электрически последовательно с измерительным конденсатором 2, образованным электродами 4, 5 и слоем воздуха 3, толщина (xо) которого такая же, как и в прототипе. Пьезоэлемент 9 крепится держателем-изолятором 10 к корпусу 1. Емкость пьезоэлемента 9 Сn выбрана значительно больше емкости измерительного (воздушного) конденсатора Св. Измерительная линия 7 выполнена в виде оптического канала для измерения параметров движения поверхности пьезоэлемента 9 и содержит (отражающую) поверхность выходного электрода 11 пьезоэлемента 9 и волоконный световод 12, торец которого направлен к центру пьезоэлемента 9. Волоконный световод 12 обеспечивает передачу оптических сигналов к оптическому регистратору (интерферометру).
Емкостный датчик функционирует следующим образом. Датчик устанавливается на поверхность исследуемого образца 6 на фиг.1. Включают источник постоянного напряжения Еo и заряжают предварительно емкости воздушного конденсатора Св и пьезоэлемента Сn. В момент времени t=0 выхода УВ на поверхность образца (электрод 5) последняя начинает движение со скоростью W(t) к неподвижному электроду 4, что приводит к уменьшению воздушного зазора 3 за счет смещения x(t) поверхности образца, изменению (увеличению) емкости Св, появлению импульса емкостного тока I(t), изменению (увеличению) напряжения на пьезоэлементе 9 и возникновению импульсного электрического поля ΔЕn(t) в объеме последнего, действие которого вследствие обратного пьезоэффекта приводит в свою очередь к возникновению механического напряжения Δσe(t) в этом объеме. Релаксация напряжения Δσe(t) в пьезоэлементе происходит путем образования на его свободных поверхностях с электродами 4 и 11 акустических упругих волн, бегущих навстречу друг к другу. При этом названные поверхности движутся со скоростью w(t)=Δσe(t)/Zn, определяемой из закона сохранения количества движения (см., например, ссылку [1]). Прецизионное измерение скорости свободной поверхности w(t) непосредственно или ее смещения с последующим дифференцированием и определением w(t) расчетным путем производится с помощью оптического канала, содержащего (отражающую) поверхность выходного электрода 11 и волоконный световод 12, торец которого направлен к центру пьезоэлемента 9. Волоконный световод обеспечивает передачу оптических сигналов к оптическому регистратору, например лазерному интерферометру для измерений ультразвуковых колебаний /см., например, 3. А.И.Кондратьев, Ю.М.Криницын, С.А.Гусаков. Лазерные интерферометры для измерений ультразвуковых колебаний. Автометрия. 2000, №4, с.116-123; 4. П.В.Базылев. Двухканальный лазерный приемник ультразвуковых колебаний. ПТЭ, 2003, №1, с.110-111./. Смещение x(t) поверхности образца вычисляется с помощью приведенного выше соотношения путем умножения w(t) на константу, а именно x(t)=xo·δ·Zn·w(t)/e·Uo. В относительных единицах измерения форма временных зависимостей скорости движения поверхности пьезоэлемента w(t) и смещения поверхности исследуемого образца x(t) одинакова, см. фиг.3. Скорость W(t) поверхности исследуемого образца может быть найдена затем путем дифференцирования зависимости x(t).
Применение заявляемого датчика предоставляет возможность его использования также в качестве отметчика времени или датчика динамического давления с момента t=Тпр схлопывания воздушного зазора (слоя) в процессе движения подвижного электрода (свободной поверхности образца), определяемого из соотношения х(Tпр)=xо, то есть уже значительно позже (Тo≪Tпр) процесса регистрации рассматриваемым методом в интервале (t, То), для которого необходимо выполнение условия х(То)≪xо. При схлопывании зазора происходит соударение образца с пьезопреобразователем и образование волны сжатия в момент t=Tпр, параметры которой могут быть зарегистрированы интерферометрическими методами, см. фиг.3.
Таким образом, использование предлагаемого изобретения приводит к повышению помехозащищенности датчика от электромагнитных наводок, расширению его функциональных возможностей и области его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ИМПУЛЬСНОГО ДАВЛЕНИЯ | 2005 |
|
RU2296966C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОГО ИМПУЛЬСА | 2005 |
|
RU2297640C2 |
| УЛЬТРАЗВУКОВОЙ ГЕНЕРАТОР | 2007 |
|
RU2343011C1 |
| Измерительный преобразователь давления | 1988 |
|
SU1624331A1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| СПОСОБ ОЦЕНКИ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ ДВИЖУЩИХСЯ ЛЕГКОДЕФОРМИРУЕМЫХ МАТЕРИАЛОВ СЕТЧАТОЙ СТРУКТУРЫ | 2006 |
|
RU2302613C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГИДРОАКУСТИЧЕСКОГО ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2493543C2 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ ТОКОПРОВОДЯЩЕГО ПОКРЫТИЯ НА ДИЭЛЕКТРИЧЕСКОМ МАТЕРИАЛЕ | 2012 |
|
RU2504730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ГРУНТА ИЗЛУЧАЮЩЕЙ ПЛИТОЙ-АНТЕННОЙ ИМПУЛЬСНОГО СЕЙСМОИСТОЧНИКА С ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ | 2005 |
|
RU2265234C1 |
Изобретение относится к области измерений параметров импульсных механических нагрузок и может быть использовано для непрерывной регистрации профилей скорости движения вещества в экстремальных условиях. Сущность: емкостный датчик содержит измерительный плоский конденсатор, заполненный слоем воздуха, с неподвижным и подвижным электродами, электромеханический преобразователь в виде плоского пьезоэлемента, измерительную линию и цепь питания. Один из электродов пьезоэлемента служит неподвижным электродом измерительного конденсатора. Емкость пьезоэлемента выбрана значительно больше емкости измерительного конденсатора. Измерительная линия выполнена в виде оптического канала для измерения параметров движения поверхности пьезоэлемента. Технический результат: повышение помехозащищенности датчика от электромагнитных наводок, расширение функциональных возможностей и области применения. 3 ил.
Емкостный датчик, содержащий измерительный плоский конденсатор, заполненный слоем воздуха, с неподвижным и подвижным электродами, измерительную линию и цепь питания, отличающийся тем, что дополнительно введен электромеханический преобразователь в виде плоского пьезоэлемента, один из электродов которого служит неподвижным электродом измерительного конденсатора, при этом емкость пьезоэлемента выбрана значительно больше емкости измерительного конденсатора, а измерительная линия выполнена в виде оптического канала для измерения параметров движения поверхности пьезоэлемента.
| Динамическое устройство для измеренияМАлыХ пЕРЕМЕщЕНий | 1979 |
|
SU815472A1 |
| SU 181245 A1, 30.04.1993 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| DE 19959135 A1, 15.06.2000 | |||
| ИВАНОВ А.Г | |||
| и др | |||
| Метод емкостного датчика для регистрации мгновенной скорости движущейся поверхности, Приборы и техника эксперимента, 1963, №1, 135-138. | |||

