Изобретение относится к области навигационной техники, а именно к гироскопической аппаратуре, используемой преимущественно в составе бортовых инерциальных навигационных систем миниатюрного исполнения.
Указанные гироскопы предназначаются для определения проекций входных угловых скоростей на оси их чувствительности.
При этом конструктивно они могут выполняться как в виде функционально законченных одноосных модулей с инерциальными чувствительными элементами, встраиваемыми в индивидуальные металлические корпуса, так и трехосных блоков, когда несколько, обычно три гироскопических датчика, непараллельно и, в частности, ортогонально размещаются в односекционном монолитном металлическом корпусе, снабженном соответствующими посадочными гнездами под них.
Помимо гироскопов, в помянутых выше системах обычно используют и другие базовые чувствительные элементы, например, акселерометры, предназначаемые для измерения ускорений, обслуживающую указанную аппаратуру бортовую электронику и пр.
Инерциальные навигационные системы в целом позволяют решать комплексную задачу навигации объекта, заключающуюся в определении параметров его движения, а именно координат объекта, величины и направления его скорости.
Благодаря своим особым потребительским качествам, обусловленным, в основном, миниатюрностью исполнения (поперечные размеры ограничены цилиндрической поверхностью диаметром не более 40 мм), высоким весовым совершенством, вибропрочностью (амплитудой 10…40g в частотном диапазоне от 3 до 250 Гц), точностными характеристиками (случайная составляющая дрейфа на уровне 0,1 град/час), способностью противостоять перегрузкам (до 60g при длительности импульса 8…12 мс) и функционировать в достаточно широком диапазоне температур (от -40 до +80°С), а также малым (порядка 1,3 Вт) энергопотреблением и временем подготовки к работе (5с) и пр., заявляемый одноосный ТВГ может без особых затруднений размещаться на различного рода подвижных объектах с ограниченным монтажным объемом и энергопотреблением, эксплуатируемых в экстремальных условиях.
В частности, они могут органически встраиваться, в составе вышеупомянутых трехосных гироскопических блоков, в используемые для контроля геометрических параметров нефтегазовых скважин забойные телеметрические системы (ЗТС), располагаемые непосредственно на борту буровой колонны. В этом случае определение параметров скважин осуществляется без нарушения процесса бурения. Реализуемая на практике технология бурения, предусматривает обычно чередование непосредственного бурения с относительно небольшими остановками, используемыми для наращивания (подсоединения) очередной секции трубы. Поэтому, с учетом вышеупомянутого быстродействия заявляемого ТВГ, задача определения угловой ориентации скважины, в данном случае, может быть успешно решена именно в моменты таких технологических остановок, т.е. фактически без каких либо отклонений от существующей технологии бурения.
Помимо измерения угловой ориентации ЗТС позволяет определить и ряд дополнительных технологических параметров скважины.
В принципе заявляемые ТВГ могут быть использованы для измерения углового положения скважины и традиционным способом, а именно в составе подвешиваемых на кабеле или тросе автономных скважинных инклинометров.
Однако измерения углового положения скважины таким способом нетехнологичны, поскольку спуск инклинометра в забой и подъем его оттуда осуществляются в данном случае при остановленной буровой и могут занимать несколько часов. При этом в ряде случаев даже при относительно небольшой частоте контроля кривизны скважины связанные с этим непроизводственные затраты могут оказаться неприемлемыми.
Настоятельная необходимость создания гироскопической аппаратуры нового поколения, подобной заявленной, очевидна и обусловлена, в основном, двумя факторами.
К первому из них можно отнести резкое наращивание в последнее время объемов бурения нефтяных и газовых скважин и возрастание числа горизонтальных, направленных и морских скважин, при прокладке которых необходимы частые замеры их кривизны.
Второй связан с тем, что подавляющее количество из эксплуатируемых сегодня отечественных и зарубежных инклинометров построено на традиционной элементной базе и относительно устаревших технических решениях, не отвечающих современному техническому уровню, а следовательно, и не обеспечивающих конкурентоспособности на рынке оборудования рассматриваемого класса.
Помимо нефтегазовой отрасли, данное изобретение может быть использовано и в традиционных отраслях хозяйства (авиации, морском флоте, ракетной и космической технике), а также при проведении некоторых специальных работ.
Известно достаточно большое количество аналогов изобретения как отечественной, так и зарубежной разработки, а также заложенных в их конструкцию соответствующих технических решений [см., напр., «Инженерный справочник по космической технике» под ред. проф., докт. техн. наук А.В.Солодова, М., «Воениздат», 1969 г., ББК 6Т6 (083), УДК 629, 19 (083), стр.350-361; «Руководство по проектированию элементов систем автоматики», Андрюшина Е.П. и др., М., «Высшая школа», 1969 г., УДК 621, 032-318, 57, стр.174, рис.7.16а; «Вакуумные аппараты и приборы химического машиностроения», изд. второе, перераб. и доп., Шумский К.П., М., «Машиностроение», 1974 г., УДК 621, 15/52-66.05, стр.485 - рис.418, стр-486 - рис.420а, стр.487 - рис.421; «Основы вакуумной техники», Б.И.Королев и др., М., «Энергия», 1975 г., 6Ф0.31, 0-75, УДК 621.52, стр.297-304, рис.14-2, 14-3, 14-6, 14-8…14-10; авт. свид. SU №438327, G01C 19/56, 05.02.75; D/ Lynev, A.Matthews, G.N.Varty, Материалы симпозиума по гироскопической технологии в Штутгарте (Германия), 1977 г., стр.(9.0-9.21); Пат. US №4157041, G01С 19/56, 05.06.79; Справочник технолога-приборостроителя», в 2-х т. - 2-е изд. перераб. и доп., Т2 / под ред. Е.А.Скороходова - М., «Машиностроение», 1980 г., ББК 34,9, С74, УДК 681.2.002(031), стр.461, рис.25в; «Спутник буровика», Иогансен К.В., М., «Недра», 1981 г., УДК 622, 24 (031), стр.152, табл.13в, рис.26; авт. свид. SU №591035, G01C 19/64, 07.07.82; European patent №0141621, G01С 19/56, 1983 г.; «Физический энциклопедический словарь». Глав. ред. A.M.Прохоров, ред. кол. Д.М.Алексеев и др., М., «Советская энциклопедия», 1984 г., ББК 53(03) Ф50, стр.125-127, 276, 277, рис.1-3; «Практикум по инженерной геодезии», под ред. проф., докт. техн. наук В.Е.Новака, изд. третье, перераб. и доп., М., «Недра», 1987 г., УДК 528,48, стр.169-176; авт. свид. SU №1361638, Н01В 17/0, 23.12.87 г.; «Электроника», Энциклопедический словарь, Гл. ред. Колесников В.Г., М., «Советская энциклопедия», 1991 г., ББК 32.85., Э45, стр.511, 512; Ковшов Г.Н., Алимбеков Р.И., Жибер А.И. «Инклинометры», Уфа, «Галем», 1998 г.; Ковшов Г.Н., Бодунов С.Б. «Гироинклинометр для измерения при бурении». Совместная научная сессия Секции навигационных систем и их чувствительных элементов и С.-Петербургской секции прецизионной гироскопии по теме: «Скважинная навигация, инклинометрия и навигация»: Тезисы докл., - Гироскопия и навигация, 1999 г., - №3 - стр.25; Пат. RU №2147117 C1, G01C 19/56, 27.03.2000 г; Бодунов Б.П., Бодунов С.Б., Лопатин В.М., Чупров В.П. «Разработка и испытание волнового твердотельного гироскопа для использования в инклинометрической системе» - VII Санкт-Петербургская международная конференция по интегральным навигационным системам: Тез. докл. - Гироскопия и навигация. 2001 г., №2 стр.121].
В большинстве известных инклинометров до настоящего времени используются азимутальные датчики на основе однокатушечных феррозондовых преобразователей, измеряющих проекции вектора магнитного поля Земли (см. упомянутый выше «Физический энциклопедический словарь», стр.808).
Существенным недостатком этих датчиков является их чувствительность к ферромагнитным аномалиям, обусловленным, в частности, использованием обсадных труб из магнитомягких материалов.
Измерительные датчики других инклинометров относятся к гироскопической аппаратуре так называемого классического типа. Чувствительным элементом таких гироскопов является вращающийся ротор, ось которого может изменять свое направление в пространстве. Указанные гироскопы длительное время применялись в большинстве навигационных систем и в некоторых областях техники используются до настоящего времени.
Классические гироскопы отличаются сложностью конструктивного исполнения, использованием в своем составе ротора, подшипников и других вращающихся частей. По этой причине такие приборы имеют достаточно низкую вибрационную и ударную прочность, ограниченный ресурс работы и высокую потребляющую мощность. Для сохранения же необходимых точностных характеристик этих гироскопов в широком диапазоне температур требуется соответствующее термостатирующее оборудование, существенно усложняющее навигационную систему в целом.
Несмотря на длительное господство классических гироскопов и значительные усилия, направленные на улучшение их характеристик, постепенно предпочтение в навигационной технике стало отдаваться гироскопам нового поколения, работа которых основывается на иных физических принципах, например квантовым и вибрационным (см. «Физический энциклопедический словарь», стр.127, 276, 277 - рис.1-3; авт. свид. SU №438327, 591035; Пат. US №4157041, евр. пат. №0141621 и др.).
К первым из них относятся волоконно-оптические, лазерные и ядерные гироскопы. В основу принципа действия их положено использование особых свойств атомных ядер и электронных частиц, поведение которых описывается законами квантовой механики.
Квантовые гироскопы безинерционны, обладают соответствующей стабильностью свойств и могут работать в широком диапазоне температур. Однако они тоже сложны в исполнении и обладают большими габаритами.
В связи с рассмотренными особенностями исполнения, а также неспособностью выдержать в течение длительного времени эксплуатацию в упомянутых выше экстремальных условиях и по ряду других причин, практическое использование классических и квантовых гироскопических приборов в составе инклинометрического оборудования пока проблематично. Именно поэтому сегодня в практике большинства из отечественных и зарубежных фирм почти нет гироскопических инклинометров указанного типа, непосредственно встраиваемых в конструкцию буровых колонн и обеспечивающих оперативное получение необходимой информации об угловом положении скважин без нарушения существующей технологии бурения.
Вибрационные гироскопы содержат в качестве чувствительного элемента не вращающийся ротор, а вибрирующее тело. Среди них особое место занимают ТВГ с полусферическим резонатором.
В основу их принципа действия положен эффект чувствительности вибрирующей твердотельной, в данном случае полусферической, оболочки резонатора к вращению основания (корпуса), на котором она крепится. Конструктивно они предельно просты в исполнении по сравнению с ранее рассмотренными типами гироскопов, поскольку состоят всего из нескольких функциональных частей, изготовленных из кварцевого стекла, жестко связанных между собой и с указанным основанием.
По этой причине такие гироскопы, собственно, и называют твердотельными.
Отличительной особенностью ТВГ является полное отсутствие в их конструкции движущихся (вращающихся) частей. Колебания полусферического резонатора (оболочки) происходит только в пределах упругих деформаций (амплитудой до 1 мкм, например, на звуковой частоте 8000 Гц).
Вследствие простоты конструкции и использования в ней минимально возможного количества деталей, такие приборы обладают повышенной надежностью в условиях ударов и вибраций, имеют небольшие габариты, массу и низкое энергопотребление. В них нет также узлов и деталей, которые бы являлись источниками теплового излучения.
В зависимости от способа реализации электронных систем ТВГ они могут функционировать как в режиме непосредственного измерения скорости, так и в режиме ее интегрирования.
Из числа известных аналогов заявляемого технического решения ближайшим (прототипом) может служить ТВГ, конструктивное исполнение и описание которого приведены в европейском патенте №0141621, G01C 19/56, 1983 г.
Выбранный в качестве прототипа ТВГ содержит металлический вакуумируемый корпус, снабженный штенгелем, газопоглотителем и соответствующими установочно-присоединительными элементами, во внутренней полости которого размещены изготовленные из кварцевого стекла и жестко скрепленные между собой и с корпусом инерциальный чувствительный элемент, в виде полусферического резонатора, с проходящим через полюс его полусферы двухсторонним держателем стержневого типа, и электрически взаимодействующие с полусферой через емкостный зазор возбудитель высокочастотных эллиптических колебаний резонатора и узел съема (считывания) электрических сигналов, отражающих азимутальную ориентацию колебательной картины вибрирующей оболочки резонатора с металлизированными рабочими поверхностями и группой скоммутированных соответствующим образом электродов, соединенных через гнездовые контакты со штыревыми контактами проходных электрических гермовыводов, а также сопрягаемую с ножками указанных контактов многоконтурную электронную систему, обеспечивающую возбуждение и поддержание колебаний резонатора с заданной амплитудой, постоянной частотой и фазой независимо от местонахождения колебательной картины вибрирующей оболочки, и измерение, преобразование и соответствующую отработку считываемой информации.
Материал и соответствующие геометрические параметры полусферической оболочки резонатора известного ТВГ придают ей особые (упругие) свойства, благодаря которым она может приводиться в колебательное движение при помощи внешнего переменного электрического поля.
На торцевой кромке указанной оболочки сформированы соответствующие балансировочные зубцы, значительно усложняющие конструкцию детали и технологию ее изготовления.
Оба, внутренний и наружный, наконечника (ножки) двухстороннего стержневого держателя резонатора имеют, примерно, одинаковый вылет (длину) не менее трех диаметров их поперечного сечения и используются для его закрепления по двухопорной схеме.
Возбудитель колебаний полусферической оболочки резонатора известного ТВГ выполнен в виде располагаемой над ней полой многоступенчатой детали, образованной достаточно сложной совокупностью соответствующих поверхностей вращения (конических, цилиндрических, плоских, сферических).
В зоне примыкания к наружной поверхности оболочки резонатора внутренняя поверхность возбудителя выполнена в виде зеркально отображающей ее полусферы, на которой сформированы кольцевой и четыре группы по четыре, в общей сумме шестнадцать, дискретно, через 22,5 градуса, разнесенных в окружном направлении и скоммутированных соответствующим образом локальных управляющих электродов круговой конфигурации, подсоединенных к восьми контактным гнездам узла съема, сопряженным со штыревыми однопроводящими контактами высоковольтных (сильноточных) проходных электрических гермовыводов, встроенных в изоляторы привариваемой к нижнему срезу вакуумируемого корпуса металлической крышки с выходом их ножек за ее внешние обводы.
Токопроводы от кольцевого электрода возбудителя и наружной поверхности полусферической оболочки резонатора подсоединены к двум, располагаемым с противоположной стороны ТВГ, отдельным проходным электрическим гермовыводам такого же исполнения, встроенным в соответствующие изоляторы вакуумируемого металлического корпуса с выходом их ножек за его внешние обводы.
Кольцевой электрод возбудителя используется для поддержания колебаний полусферической оболочки резонатора с постоянной амплитудой, а шестнадцать локальных электродов - для подавления квадратурных вибраций резонатора.
Большое количество и удаленность управляющих электродов возбудителя колебаний от проходных электрических гермовыводов существенным образом затрудняет прокладку соответствующих токопроводов, соединяющих данные элементы конструкции.
Вследствие особенностей исполнения конструкция возбудителя колебаний резонатора известного ТВГ слишком сложна и нетехнологична. Большая трудоемкость ее изготовления в значительной мере обуславливает достаточно высокую цену рассматриваемого изделия в целом.
Узел съема электрических сигналов известного ТВГ выполнен в виде плоского основания фланцевого типа с возвышающимся над ним шаровым сегментом, на наружной поверхности которого сформированы восемь, дискретно, через 45°, разнесенных в окружном направлении и скоммутированных соответствующим образом локальных измерительных электродов круговой конфигурации, используемых для съема (считывания) параметров азимутальной ориентации колебательной картины вибрирующей оболочки резонатора.
Каждый из измерительных электродов узла съема сопряжен при помощи токопроводов с индивидуальными разъемными соединителями коаксиального типа проходных низковольтных электрических гермовыводов, встроенных в изоляторы упоминавшейся выше металлической крышки вакуумируемого корпуса, с выходом их ножек наружу за ее внешние обводы.
Такое (коаксиальное) исполнение указанных гермовыводов обусловлено наличием в конструкции известного ТВГ высоковольтных цепей управления и необходимостью соответствующей защиты слаботочных измерительных цепей от их негативного воздействия (электрических наводок) и уменьшения паразитных емкостей.
В шаровом сегменте указанного узла между локальными измерительными электродами прорезаны насквозь щелевидные радиальные пазы, отделяющие их друг от друга.
Наличие таких пазов, а также большое количество (шестнадцать) разнотипных проходных электрических гермовыводов от собственных низковольтных и высоковольтных цепей управления значительно усложняют конструкцию узла съема, увеличивают трудоемкость его изготовления, а следовательно, и цену изделия.
Шаровой сегмент узла съема введен вовнутрь полусферической оболочки резонатора до упора верхней поверхностью своего фланца в нижнюю торцевую кромку возбудителя и жестко скреплен с ним при помощи индия.
Кольцевой и локальные электроды возбудителя и узла съема в совокупности с примыкающими к ним фрагментами наружной и внутренней поверхностей полусферической оболочки резонатора образуют сферические конденсаторы, одни из обкладок которых (в данном случае, упомянутые выше фрагменты оболочки) вследствие упругости последней обладают соответствующей подвижностью по отношению к шаровому сегменту возбудителя.
Резонатор известного ТВГ жестко закрепляется при помощи обеих своих ножек в соосно располагаемых напротив друг друга вдоль измерительной оси соответствующих посадочных отверстий возбудителя и узла съема по двухопорной схеме в процессе их сопряжения. Скрепленные друг с другом резонатор, возбудитель его колебаний и узел съема представляют собой соответствующий промежуточный (неокончательно собранный) модуль, который в таком виде вставляется вовнутрь вакуумированного корпуса и фиксируется там при помощи специально предусмотренных для этого крепежных деталей.
Двухопорная схема закрепления резонатора с формированием при этом двух емкостных зазоров между его полусферической оболочкой, возбудителем колебаний и узлом съема гораздо сложнее одноопорной. В этом случае существенным образом затрудняются взаимная выставка указанных деталей ТВГ и контроль упомянутых зазоров.
Снизу вакуумированный корпус известного ТВГ герметизируется при помощи привариваемой к нему плоской металлической крышки. Она не имеет центрирующего буртика, обеспечивающего необходимую соосность свариваемых частей корпуса и соответствующую силовую разгрузку стыкуемых при этом гнездовых и штыревых контактов разъемных соединителей проходных электрических гермовыводов от воздействия на них возникающих при сварке поводок (механических напряжений), которые могут привести к изменению переходных сопротивлений упомянутых соединений.
К существенному недостатку известного ТВГ следует отнести и нерациональную компоновку газопоглотителя в центральной части металлической крышки вакуумированного корпуса с формированием там консольного выступа. Это в значительной мере усложняет конструкцию как самой крышки, так и присоединяемой к ней соответствующей розетки электронной системы.
Указанная компоновка приводит к существенному увеличению габаритов ТВГ как в осевом, так и в поперечном направлениях и ограничению размеров, а следовательно, и соответствующей емкости газопоглотителя.
В конструкции корпуса известного ТВГ нет общей (как механической, так и электрической) экранировки выходящих наружу ножек проходных электрических гермовыводов.
Электронная система известного ТВГ - неадаптивная. Основные ее контуры построены на относительно устаревших технических решениях и нецифровой элементной базе, чувствительной к экстремальным условиям эксплуатации. Логика ее работы не предусматривает разделения во времени операций считывания измеряемой информации и управления.
Однако, несмотря на отмеченные недостатки, в целом, прототип заявляемого технического решения среди аналогов рассмотренного класса (ТВГ), несомненно, является одним из лучших известных образцов такой аппаратуры, нашедших практическое применение в навигационной технике.
Задачей настоящего изобретения является устранение вышерассмотренных недостатков известных аналогов и прототипа заявляемого малогабаритного ТВГ, а именно: улучшение его технико-эксплуатационных качеств, позволяющих достигнуть современного технического уровня и конкурентоспособности такого рода аппаратуры, а также соответствующего снижения стоимости и сокращения сроков ее создания.
В соответствии с изобретением она достигается конкретной совокупностью существенных признаков заявляемого ТВГ, приведенной ниже по тексту.
К совокупности существующих признаков, характеризующих заявляемый малогабаритный ТВГ, относится следующее:
1) выполнение ТВГ малогабаритным;
2) наличие вакуумируемого металлического корпуса;
3) снабжение вакуумируемого корпуса штенгелем, представляющим собой откачное гнездо ниппельного типа, для подсоединения ТВГ к технологической вакуумной камере и отстыковки от нее после вакуумирования;
4) снабжение вакуумируемого корпуса газопоглотителем с активируемым рабочим веществом;
5) снабжение вакуумируемого корпуса соответствующими установочно-присоединительными элементами;
6) наличие изготовленных из кварцевого стекла с металлизацией рабочих поверхностей инерциального чувствительного элемента вибрационного типа, возбудителя его колебаний и узла съема электрических сигналов с чувствительного элемента;
7) жесткое скрепление инерциального чувствительного элемента, возбудителя его колебаний и узла съема между собой в твердотельный волновой инерциальный модуль, размещаемый, с обеспечением фиксации, во внутренней полости вакуумируемого корпуса;
8) выполнение инерциального чувствительного элемента в виде способного приводиться в колебательное движение при помощи внешнего переменного электрического поля полусферического резонатора, с проходящим через полюс его полусферы двухсторонним держателем стержневого типа;
9) электростатическое взаимодействие возбудителя с полусферическим резонатором через емкостной зазор между ними с обеспечением генерирования высокочастотных эллиптических колебаний его оболочки в зоне упругих деформаций и формированием в плоскости, перпендикулярной оси последней стоячей волны с четырьмя устойчивыми к колебаниям узловыми областями и четырьмя имеющими максимальную амплитуду отклонений пучностями, попарно ориентированными вдоль проходящих через них и равноудаленных друг от друга групп взаимно перпендикулярных радиальных осей, способной под воздействием входного инерциального вращения корпуса прецессировать с соответствующим изменением во времени параметров, упомянутого выше электрического поля, преобразуемым в ток, пропорциональный угловой скорости вращения;
10) выполнение узла съема электрических сигналов, отображающих азимутальную ориентацию колебательной картины вибрирующей оболочки резонатора, в виде плоского основания фланцевого типа с возвышающимся над ним шаровым сегментом, на наружной поверхности которого сформированы восемь, обращенных к ее поверхности и попарно действующих в областях пучности и узлов, локальных электродов, соединенных при помощи соответствующих токопроводов через индивидуальные гнездовые контакты со штыревыми однопроводящими контактами проходных электрических гермовыводов, встроенных в изоляторы привариваемой к нижнему срезу вакуумируемого корпуса металлической крышки с выходом их ножек наружу за ее внешние обводы;
11) наличие отдельно сформированного от соединенных с локальными электродами узла съема проходных гермовыводов гермовывода такого же исполнения, электрически сообщенного с металлизированной поверхностью полусферы резонатора;
12) наличие сопрягаемой с проходными электрическими гермовыводами многоконтурной электронной системы, обеспечивающей возбуждение и поддержание колебаний резонатора с заданной амплитудой, постоянной частотой и фазой независимо от фактической ориентации колебательной картины, а также измерение, преобразование и соответствующую обработку считываемой информации;
13) выполнение возбудителя колебаний резонатора и узла съема электрических сигналов в виде размещаемой внутри полусферы резонатора единой монолитной детали, представляющей собой комбинированную электромеханическую плату универсального назначения, используемую как для возбуждения и поддержания колебаний вибрирующей оболочки резонатора, так и для съема электрических сигналов, со сплошной, без радиальных щелевидных пазов рабочей поверхностью шарового сегмента, сформированная на которой группа локальных электродов в совокупности образует систему соответствующих емкостных датчиков перемещения и силовых электродов одновременно и является общей для решения обеих из указанных задач;
14) выполнение полусферической оболочки резонатора сплошной без балансировочных зубцов с обеспечением прецизионного уровня геометрической и массовой осевой симметрии, достигаемой в первом случае путем высокоточной технологии механической обработки и контроля размеров, а во втором - посредством соответствующей балансировки резонатора с разложением массового дефекта в ряд Фурье и последующим устранением первых четырех гармоник дефекта и, в частности, первых трех из них - до минимально возможного уровня, позволяющего снизить влияние азимутальной неравномерности демпфирования и уменьшить до необходимых пределов вибрационные воздействия на волновую картину, а массовый дефект четвертой (разночастотность) - минимизировать до уровня, обеспечивающего нормальное функционирование электроники управления при малых значениях напряжения электропитания;
15) консольное, по одноопорной схеме, закрепление резонатора только в соответствующем посадочном отверстии комбинированной электромеханической платы съема/возбуждения за вводимый в него внутренний наконечник (ножку) двухстороннего стержневого держателя посредством соответствующего клеевого соединения или пайки без использования каких-либо промежуточных деталей;
16) укорочение наружного наконечника двухстороннего стержневого держателя резонатора по сравнению с ножкой, по крайней мере, в несколько раз, и использование его преимущественно в технологических целях и, в частности, при шлифовке детали в центрах, транспортировке и оценке ее несбалансированности через измерение амплитуды биений указанного наконечника;
17) ввод упоминавшейся выше металлической крышки в состав твердотельного волнового инерциального модуля;
18) выполнение металлической крышки указанного модуля в виде жестко скрепляемой с нижним торцом основания комбинированной электромеханической платы съема/возбуждения посредством соответствующего клеевого соединения или пайки и обращенной книзу дном тарели с отбортованным по краю в зоне приварки к вакуумируемому корпусу цилиндрическим центрирующим буртиком одинакового с основанием платы диаметра, заглубляемым при сборке в соответствующее посадочное гнездо корпуса такой же конфигурации и размеров до совмещения их свариваемых кромок;
19) возможность выполнения вакуумируемого корпуса в виде двух по установочно-присоединительным элементам модификаций с цилиндрической либо квадратной в поперечном сечении конфигурацией, образованной в последнем случае одинаковыми плоскими базовыми поверхностями, ортогонально расположенными по отношению друг к другу;
20) размещение газопоглотителя в свободном объеме верхнего отсека вакуумируемого корпуса, ограниченного стенками его полости и наружными поверхностями полусферы и технологического наконечника двухстороннего стержневого держателя резонатора;
21) возможность выполнения газопоглотителя в виде любой из двух эквивалентных в функциональном отношении модификаций, а именно в корпусном либо бескорпусном вариантах, причем в первом случае он представляет собой функционально законченный автономный насос с заключенным в герметизируемую корпусную оболочку кольцевой или тороидальной формы реагентом типа титан/ванадий, способным поглощать газ, активируемым после обезгаживания и герметизации вакуумируемого корпуса посредством прожигания через оптически прозрачный (стеклянный) иллюминатор последнего лазерным лучом, либо механического вскрытия утонченной мембраны оболочки, а во втором - рабочее вещество крепится в той же зоне непосредственно к стенкам вакуумируемого корпуса и активируется путем соответствующего нагрева указанных стенок снаружи внешним тепловым излучателем;
22) возможность выполнения штенгеля вакуумируемого корпуса в виде разъединяемого посредством оплавления стеклянного либо металлического ниппеля, пережимаемого путем пластического деформирования до полного перекрытия прохода и «холодной сварки» сближаемых стенок с одновременной его обрезкой;
23) назначение величины емкостного зазора между обращенными друг к другу поверхностями полусферы резонатора и локальных электродов комбинированной электромеханической платы съема/возбуждения порядка 100 мкм исходя из низковольтного питания электроники и возможности технической осуществимости геометрического контроля его при сборке;
24) размещение упоминавшегося выше отдельного проходного гермовывода, сообщенного с металлизированной поверхностью полусферы резонатора, на комбинированной электромеханической плате съема/возбуждения со встраиванием гнездового контакта непосредственно в ножку двухстороннего стержневого держателя резонатора и расположением сопрягаемого с ним штыревого однопроводящего контакта прямо по центру дна тарельчатой металлической крышки твердотельного волнового инерциального модуля;
25) минимизация габаритов твердотельного волнового инерциального модуля, а следовательно и вакуумируемого корпуса, до пределов, обеспечивающих возможность компоновки их в крайне малых, до 40 мм по диаметру, монтажных объемах как при продольной, так и поперечной ориентации оси чувствительности;
26) выполнение электронной системы адаптивной;
27) построение основных контуров электронной системы, и, в частности, измерения и управления колебаниями, на цифровой, малочувствительной к экстремальным условиям эксплуатации элементной базе с минимизацией количества, размеров и поглощаемой мощности электронных компонент и закладкой соответствующих алгоритмов обработки данных и управления во введенный в ее состав микропроцессор, обеспечивающий функционирование указанных контуров в импульсном режиме с формированием рабочего цикла, разделяемого во времени на интервалы измерения и управления и использованием при регистрации выходных электрических сигналов способа «обратного» включения, когда они снимаются с ножки двухстороннего стержневого держателя резонатора;
28) замыкание регистрации электрических сигналов и управления колебаниями резонатора на одни и те же электроды, соединенные с однотипными проходными электрическими гермовыводами комбинированной электромеханической платы съема/возбуждения упомянутого выше исполнения;
29) сопряжение электронной системы с проходными электрическими гермовыводами комбинированной электромеханической платы через присоединяемый к располагаемым снаружи ножкам их штыревых контактов предварительный усилитель сигналов;
30) обеспечение общей экранировки выходящих наружу ножек штыревых контактов проходных электрических гермовыводов комбинированной электромеханической платы и подсоединенного к ним предварительного усилителя сигналов при помощи пристыковываемого к вакуумируемому корпусу тонкостенного защитного металлического корпуса;
31) формирование токопроводов предварительного усилителя в компактный жгут, выводимый наружу сквозь эластичный проход в донной части кожуха.
Совпадающими в прототипе и заявляемом изобретении являются первые двенадцать существенных признаков, приведенных в данном перечне, а остальные являются отличительными. При этом все указанные признаки относятся к существенным, поскольку каждый из них соответствующим образом влияет на достигаемый при осуществлении заявляемого изобретения результат, т.е. находится с ним в причинно-следственной связи.
Характер указанного влияния, применительно к каждому из отличительных признаков, детально рассмотрен ниже по тексту при пояснении сущности заявляемого изобретения.
Сущность заявляемого изобретения поясняется чертежами, где изображены:
на фиг.1 - общий вид заявляемого малогабаритного ТВГ;
на фиг.2 - выносной элемент А (см. фиг.1) с общим видом твердотельного волнового инерциального модуля в собранном виде;
на фиг.3 - твердотельный волновой модуль в разобранном виде (аксонометрическая проекция);
на фиг.4 - выносной элемент Б (см. фиг.1), поясняющий особенности жесткого сочленения полусферического резонатора и комбинированной электромеханической платы твердотельного волнового инерциального модуля посредством клеевого соединения или пайки;
на фиг.5 - схема расположения электродов и осей ТВГ (24-31- номера локальных электродов; х, -х и у, -у - оси);
на фиг.6 - схема действия сил Кориолиса на вибрирующий полусферический резонатор ТВГ (А, А', В, В' - точки на кромке резонатора; Fc - Кориолисова сила;  - направление вращения;
- направление вращения;  - направление результирующей Кориолисовой силы);
- направление результирующей Кориолисовой силы);
на фиг.7 - характер изменения ориентации волновой картины колебаний при повороте резонатора ТВГ (а - первоначальная волновая картина; б - волновая картина после поворота корпуса; - направление вращения; 27° - угол прецессии волновой картины; 90° - угол поворота корпуса);
на фиг.8 - общий вид ТВГ с квадратным (призматическим) исполнением вакуумируемого корпуса (предварительный усилитель и защитный металлический кожух условно не показаны);
на фиг.9 - вид В снизу на ТВГ с квадратным (призматическим) исполнением вакуумируемого корпуса;
на фиг.10 - монтаж ТВГ с цилиндрическим исполнением вакуумируемого корпуса на рабочем месте (D - цилиндрическая поверхность);
на фиг.11 - общий вид в разрезе трехосного гироскопического блока, сформированного из ориентированных соответствующим образом твердотельных волновых инерциальных модулей, размещенных в односекционном монолитном вакуумируемом корпусе стержневого типа;
на фиг.12 - поперечный разрез Г-Г трехосного гироскопического блока по месту расположения одного из поперечно ориентированных твердотельных волновых инерциальных модулей;
на фиг.13 - функциональная схема, поясняющая принцип построения электронной системы заявляемого ТВГ (МП - микропроцессор, АЦП - аналого-цифровой преобразователь, ШИМ - формирователь измерительных и управляющих сигналов, Х и Y - взаимно перпендикулярные оси координат, БУ - буферный усилитель).
Конструктивно заявляемый малогабаритный ТВГ содержит (см. фиг.1-13) вакуумируемый металлический корпус 1, во внутренней полости 2 которого размещен, с обеспечением фиксации, твердотельный волновой инерциальный модуль 3, включающий в себя изготовленные из кварцевого стекла, с металлизацией рабочих поверхностей, и жестко скрепленные между собой инерциальный чувствительный элемент 4 вибрационного типа, возбудитель 5 его колебаний и узел съема 6 электрических сигналов с чувствительного элемента, а также сопрягаемую с указанным модулем многоконтурную электронную систему 7.
Вакуумируемый корпус 1 ТВГ снабжен (см. фиг.1, 8-10) штенгелем 8, представляющим собой откачное гнездо ниппельного типа для подсоединения к технологической вакуумной камере (на чертеже не показана) и отстыковки от нее после ваукуумирования, газопоглотителем 9 с активным рабочим веществом 10 и соответствующими установочно-присоединительными элементами 11.
Инерциальный чувствительный элемент 4 модуля 3 выполнен (см. фиг.1, 3) в виде способного приводиться в колебательное движение при помощи внешнего электрического поля полусферического резонатора с проходящим через полюс 12 его полусферической оболочки 13 двухсторонним держателем 14 стержневого типа.
Возбудитель 5 электростатически взаимодействует (см. фиг.1, 3, 5, 7) с полусферической оболочкой 13 резонатора 4 через емкостный зазор 15, с обеспечением высокочастотных эллиптических колебаний ее в зоне упругих деформаций и формированием в плоскости перпендикулярной полярной оси 16 стоячей волны 17 с четырьмя устойчивыми к колебаниям узловыми областями 18 и столькими же, имеющими максимальную амплитуду отклонений, пучностями 19, попарно ориентированными вдоль проходящих через них и равноудаленных друг от друга двух групп взаимно перпендикулярных осей X, -X и Y, -Y, способной под воздействием входного инерциального вращения корпуса 1 прецессировать с соответствующим изменением во времени параметров упомянутого выше поля, преобразуемого в ток, пропорциональный угловой скорости вращения.
Узел съема 6 электрических сигналов, отображающих азимутальную ориентацию колебательной картины вибрирующей оболочки 13 резонатора 4, взаимодействует с ним таким же образом - через емкостный зазор 15.
Конструктивно он выполнен (см. фиг.1, 3, 5) в виде плоского основания 20 фланцевого типа с возвышающимся над ним шаровым сегментом 21.
На наружной поверхности 22 указанного сегмента сформированы восемь, обращенных к внутренней поверхности 23 полусферической оболочки 13 резонатора 4 и попарно действующих в областях пучностей 19 и узлов 18 локальных электродов 24-31.
Указанные электроды 24-31 соединены при помощи соответствующих токопроводов 32 через индивидуальные гнездовые контакты 33 со штыревыми однопроводящими контактами 34 проходных электрических гермовыводов 35, встроенных в изоляторы 36 привариваемой к нижнему срезу 37 вакуумируемого корпуса 1 металлической крышки 38, с выходом их ножек 39 наружу, за ее внешние обводы 40.
Помимо указанных, в составе модуля 3 заявляемого ТВГ имеется отдельно сформированный от них гермовывод 35 такого же исполнения, электрически сообщенный с металлизированной поверхностью 23 полусферической оболочки 13 резонатора 4.
Многоконтурная электронная система 7 заявляемого ТВГ, обеспечивающая возбуждение и поддержание колебаний резонатора 4 с заданной амплитудой, постоянной частотой и фазой независимо от фактической ориентации колебательной картины, а также измерение, преобразование и соответствующую обработку считываемой информации, сопряжена с его модулем 3 через, упоминавшиеся выше, проходные электрические гермовыводы 35.
Возбудитель колебаний 5 резонатора 4 и узла съема 6 электрических сигналов выполнены в виде размещаемой внутри полусферической оболочки 13 единой монолитной детали, представляющей собой комбинированную электромеханическую плату 41 универсального назначения, используемую как для возбуждения и поддержания колебаний вибрирующей оболочки резонатора, так и для съема электрических сигналов, со сплошной, без радиальных пазов, рабочей поверхностью 22, сформированная на которой группа локальных электродов 24-31, в совокупности, образует систему соответствующих емкостных датчиков перемещения и силовых электродов одновременно и является общей для решения обеих из указанных задач.
Указанное техническое решение предусматривает замыкание регистрации электрических сигналов и управления колебаниями на одни те же электроды комбинированной платы, соединенные с ее однотипными проходными электрическими гермовыводами. В результате использования его существенным образом упрощается конструкция твердотельного волнового инерциального модуля, а следовательно, и заявляемого ТВГ в целом. Общее количество имеющихся в его составе электродов сокращается по сравнению с прототипом более чем в 3 раза, а проходных гермовыводов - вдвое.
Указанное обстоятельство позволяет предельно упростить выполняемый посредством металлизации рисунок соответствующего электромонтажа на рабочих поверхностях комбинированной платы. К тому же все до одного из ее гермовыводов - однопроводящие, штыревого типа. Конструкция их гораздо проще и технологичнее используемых в прототипе, коаксиальных.
Поскольку все электроды комбинированной платы в заявляемом ТВГ располагаются в непосредственной близости от гермовыводов, существенным образом оптимизируется прокладка и сокращается протяженность соединяющих их токопроводов.
Отсутствие в теле шарового сегмента комбинированной платы сквозных радиальных пазов между локальными электродами придает ее конструкции необходимые прочность, жесткость и технологичность.
Благодаря значительному сокращению по сравнению с прототипом общего количества деталей, в том числе основных функциональных - до двух (резонатор и комбинированная плата) кардинально уменьшаются продольные и поперечные габариты, улучшаются весовое совершенство и внешний вид, снижается трудоемкость изготовления, а следовательно, и цена заявляемого ТВГ в целом.
Полусферическая оболочка 13 резонатора 4 выполнена сплошной, без балансировочных зубцов, с обеспечением прецизионного уровня геометрической и массовой осевой симметрии, достигаемой, в первом случае, путем высокоточной технологии механической обработки и контроля размеров, а во втором - посредством соответствующей балансировки резонатора с разложением массового дефекта в ряд Фурье и последующим устранением первых четырех гармоник дефекта, и, в частности, первых трех из них - до минимально возможного уровня, позволяющего снизить влияние азимутальной неравномерности демпфирования и уменьшить до необходимых пределов внешние вибрационные воздействия на волновую картину, а массовый дефект четвертый, разночастотность, минимизировать до уровня, обеспечивающего нормальное функционирование электроники 7 управления при малых значениях напряжения электропитания.
Отсутствие балансировочных зубцов позволяет значительно упростить конструкцию данной детали, повысить технологичность и снизить трудоемкость ее изготовления. Указанная особенность такого исполнения полусферической оболочки резонатора оказывается возможной благодаря использованию при изготовлении способа балансировки его по патенту RU 2147117 C1, обеспечивающего достижение необходимой степени массовой осевой симметрии детали при сохранении высокой (до 107 и более) акустической добротности Q, при которой значение систематической составляющей дрейфа гироскопа не превышает 1,3°/час, что позволяет использовать такие приборы в навигационных системах авиационной техники.
Резонатор 4 закреплен консольно, по одноопорной схеме, только в соответствующем посадочном отверстии 42 комбинированной платы съема/возбуждения 41 за вводимый в него внутренний наконечник (ножку) 43 двухстороннего стержневого держателя 14 посредством клеевого соединения 44 или пайки без каких-либо промежуточных деталей. Другой же, наружный, наконечник 45 держателя 14 укорочен по сравнению с ножкой 43, по крайней мере, в несколько раз и используется преимущественно в технологических целях, и в частности, при шлифовке детали в центрах, транспортировке и оценке ее несбалансированности через измерение амплитуды биений указанного наконечника.
Одноопорная схема крепления резонатора за ножку держателя гораздо проще двухопорной, существенно облегчает сборку и сокращает продольные и поперечные габариты, улучшает весовое совершенство, уменьшает трудоемкость и стоимость заявляемого ТВГ.
Клеевое соединение скрепляемых деталей отличается малым коэффициентом расширения и относительно небольшой диэлектрической проницаемостью. Оно обладает достаточно высокой адгезией, жесткостью закрепления соединяемых деталей и не растрескивается.
Привариваемая к вакуумируемому корпусу 1 металлическая крышка 38 введена в состав твердотельного волнового инерциального модуля 3. Конструктивно она выполнена в виде жестко скрепляемой с нижнем торцом 46 основания 20 комбинированной платы 41, посредством клеевого соединения 44 или пайки, и обращенной книзу дном 47 тарели с отбортованным по краю в зоне приварки к корпусу центрирующим буртиком 48 одинакового с основанием платы диаметра, заглубляемым при сборке в соответствующее посадочное гнездо 49 корпуса такой же конфигурации и размеров до совмещения их свариваемых кромок 50, 51. При этом упоминавшийся выше отдельный проходной гермовывод 35, сообщенный с металлизированной поверхностью 23 полусферической оболочки 13 резонатора 4, размещен на комбинированной плате 41 со встраиванием гнездового контакта 33 непосредственно в ножку 43 двухстороннего стержневого держателя 14 и расположением сопрягаемого с ним штыревого однопроводящего контакта 34 прямо по центру дна 47 тарельчатой металлической крышки 38 твердотельного волнового инерциального модуля 3.
Ввод указанной крышки в состав твердотельного волнового инерциального модуля делает его функционально законченной сб. ед. (узлом). Такой узел, естественно, удобнее и безопаснее транспортировать и монтировать на рабочем месте. В указанном исполнении твердотельные волновые инерциальные модули могут устанавливаться как в индивидуальные вакуумируемые корпуса 1, так и без них непосредственно в соответствующие посадочные гнезда 52 многоместных корпусов 53, например, трехосных гироскопических блоков 54 (см. фиг.11, 12).
Восемь равнорасположенных на одном уровне по периферии и один (девятый) - по центру дна тарельчатой металлической крышки однотипных проходных электрических гермовыводов вышеупоминавшегося исполнения с однопроводящими гнездовыми и штыревыми контактами образуют компактный разъем (вилку) с выходящими наружу, за внешние обводы крышки, ножками штыревых контактов, весьма удобный для подсоединения электронной системы заявляемого ТВГ.
Центральное расположение девятого (отдельного) гермовывода позволяет реализовать прокладку токопровода от металлизированной поверхности полусферической оболочки резонатора по трассе минимально возможной протяженности с исключением перекрестных связей и минимизацией емкостных наводок.
Наличие центрирующего буртика значительно облегчает задачу сопряжения тарельчатой крышки как с основанием комбинированной платы, так и с вакуумируемым корпусом. При этом практически полностью разгружаются от силового воздействия реализуемых при сварке, транспортировке и эксплуатации поперечных нагрузок как контактные соединения проходных электрических гермовыводов, так и тело основания комбинированной платы.
Вакуумируемый корпус 1 заявляемого ТВГ может быть выполнен в виде двух по установочно-присоединительным элементам 11 модификаций с цилиндрической либо квадратной (призматической) в поперечном сечении конфигурацией (см. фиг.8-10). Квадратная конфигурация указанных элементов 11, в частности, образована одинаковыми плоскими базовыми поверхностями 55, ортогонально располагаемыми по отношению друг к другу.
Выполнение вакуумируемого корпуса с практически прямолинейными по высоте, достаточно простыми в реализации и изящными внешними обводками цилиндрической либо призматической конфигурации, без выступающих наружу фрагментов конструкции, придает заявляемому ТВГ упорядоченный и привлекающий взгляд внешний вид.
Для установочно-присоединительных элементов цилиндрической конфигурации на подвижном объекте 56 должны иметься ориентированные вдоль координатных осей соответствующие посадочные гнезда 57, обеспечивающие удобное и надежное закрепление ТВГ.
Призматические установочно-присоединительные элементы позволяют устанавливать ТВГ на одной плоской площадке объекта любой из базовых поверхностей 55 с обеспечением необходимой ориентации.
Указанное техническое решение дает в этом плане достаточно большую свободу выбора как разработчику ТВГ, так и заказчику (потребителю).
Газопоглотитель 9 заявляемого ТВГ размещен в свободном объеме верхнего отсека 58 вакуумируемого корпуса 1, ограниченного боковой и потолочной стенками 59, 60 и наружными поверхностями 61, 62, соответственно, полусферической оболочки 13 и технологического наконечника 45 двухстороннего стержневого держателя 14 резонатора 4.
Конструктивно он может быть выполнен в виде любой из двух эквивалентных в функциональном отношении модификаций, а именно: в корпусном либо бескорпусном вариантах.
При этом в первом случае газопоглотитель 9 представляет собой полностью законченный автономный насос с заключенным в герметизируемую корпусную оболочку 63 кольцевидной или тороидальной формы реагентом 10 типа композиции титан/ванадий, способным поглощать из окружающей среды газ, активируемым после обезгаживания и герметизации вакуумируемого корпуса 1 посредством прожигания через оптически прозрачный (стеклянный) иллюминатор (на чертеже условно не показан) последнего лазерным лучом либо механического вскрытия утоненной мембраны (на чертеже условно не показана) оболочки.
Во втором случае активное рабочее вещество (реагент) 10 крепится в той же зоне непосредственно к стенкам 59, 60 вакуумируемого корпуса 1 и активируется путем соответствующего нагрева указанных стенок снаружи внешним тепловым излучателем (на чертеже условно не показан).
Такая компоновка и особенности исполнения газопоглотителя заявляемого ТВГ предпочтительнее реализованных в прототипе, поскольку позволяет значительно повысить за счет соответствующего увеличения размеров в пределах свободного объема верхнего отсека внутренней полости вакуумируемого корпуса емкость, а следовательно, и ресурс его работы и, что не менее важно, существенным образом оптимизировать в этой связи конструкцию тарельчатой крышки твердотельного волнового инерциального модуля в части упрощения конструкции, уменьшения габаритов, повышения технологичности последней, а также обеспечения рациональности компоновки, встроенных в изоляторы ее донной части проходных электрических гермовыводов.
Ну и, конечно же, данное техническое решение соответствующим образом расширяет свободу выбора разработчика при проектировании изделия в зависимости от имеющихся комплектующих и других факторов.
Штенгель 8 вакуумируемого корпуса 1 может быть выполнен в виде разъединяемого посредством оплавления стеклянного либо пережимаемого путем пластической деформации до полного перекрытия прохода и «холодной сварки» сближаемых стенок с одновременной его обрезкой металлического ниппеля.
Данное техническое решение таким же образом, как и в предыдущем случае, расширяет свободу соответствующего выбора разработчика на этапе создания изделия в зависимости от тех же факторов.
Каждый из локальных электродов 24-31 комбинированной платы 41 твердотельного волнового инерциального модуля 3 заявляемого ТВГ в совокупности с примыкающим к нему через емкостный зазор 15 фрагментом металлизированной поверхности 23 оболочки 13 резонатора 4 представляет собой сферический конденсатор 64. Составляющая порядка 100 мкм величина указанного зазора в заявляемом ТВГ обусловлена низковольтным питанием электроники 7 и возможностью технической осуществимости его геометрического контроля.
Габариты твердотельного волнового инерциального модуля 3, а следовательно, и вакуумируемого корпуса 1 минимизированы до пределов, обеспечивающих возможность компоновки их в крайне малых, до 40 мм по диаметру, монтажных объемах как при продольной, так и поперечной ориентациях оси 16 чувствительности.
Минимизация исполнения является одной из основных отличительных особенностей заявляемого ТВГ. Соответствующее уменьшение геометрических размеров обеспечивает таким гироскопическим приборам и высокое весовое совершенство.
Благодаря указанным особенностям исполнения они без особых затруднений могут размещаться на различного рода подвижных объектах, располагающих ограниченными монтажными объемами, предусматриваемыми под монтаж навигационной аппаратуры. Как уже отмечалось выше, заявляемый ТВГ в составе соответствующих трехосных гироскопических блоков может органически встраиваться в используемые для контроля геометрических параметров нефтегазовых скважин ЗТС, располагаемых непосредственно на борту буровых колонн.
Монтажные объемы ЗТС под соответствующую измерительную аппаратуру имеют как раз такой, до 40 мм в поперечнике, порядок. Электронная система 7 заявляемого ТВГ (см. фиг.1, 13) выполнена адаптивной. В таких системах алгоритм работы, а иногда и структура построения, могут изменяться, приспосабливаясь к соответствующим изменениям измеряемой величины и условий эксплуатации объекта. При построении адаптивных систем требуется меньшее, по сравнению с имеющими жесткий алгоритм функционирования системами, количество предварительной информации. Они обладают большей гибкостью в связи с возможностью соответствующего изменения программы их работы.
Основные контуры электронной системы 7 заявляемого ТВГ и, в частности, измерения и управления колебаниями резонатора 4 построены на цифровой и импульсной элементной базе с минимизацией количества, размеров и рассеиваемой мощности электронных компонентов и закладкой соответствующих алгоритмов обработки данных и управления во введенный в ее состав микропроцессор (МП). Формирователи измерительных и управляющих сигналов (ШИМх и ШИМу) выполнены с использованием программируемых логических матриц и электронных ключей и отрабатывают импульсные широтно-модулированные и численно-модулированные сигналы измерения и управления колебаниями. Использование импульсных методов формирования сигналов позволяет получить очень малые фазовые и амплитудные погрешности сигналов, минимальную мощность рассеивания и минимальные габаритные размеры электронной системы.
Функционирование контуров управления обеспечивает формирование рабочего цикла, разделяемого по времени на интервалы измерения и управления и использованием при измерении параметров колебаний резонатора способа «обратного» включения, когда электрический сигнал снимается с ножки 43 двухстороннего стержневого держателя 14 резонатора 4.
В основу алгоритмов управления положено управление амплитудой и угловым положением полезных колебаний резонатора 4 и подавление ненужных («квадратурных») колебаний с помощью импульсных широтно - и численно-модулированных сигналов. Это позволяет работать заявляемому ТВГ в значительно более широком диапазоне угловых скоростей, чем в случае управления колебаниями путем изменения жесткости резонатора постоянными напряжениями. Изменение знака подаваемых при этом электростатических сил производится путем изменения фазового положения соответствующих импульсов управления относительно фаз колебаний резонатора, а не подачей дополнительных постоянных напряжений смещения, что упрощает устройство электронной системы.
Измерение параметров колебаний производится на высокой частоте (например, 1,024 МГц при частоте колебаний резонатора 8 кГц) с усреднением результатов измерения, что способствует снижению уровня шумов и помех.
Применение «обратного» способа включения резонатора снимает требование сверхвысокого входного сопротивления входного усилителя съема электрического сигнала (типичное требование Rвх≥10 ГОм для «нормального» способа съема с измерительных электродов), уменьшает уровень наводок и помех на входной усилитель и позволяет устранить нестабильность масштабного коэффициента из-за влияния миграции зарядов по поверхности резонатора, т.к. резонатор находится под нулевым напряжением (не более нескольких милливольт) и заряд на нем отсутствует.
Указанные особенности исполнения электронной системы позволяют радикально оптимизировать рассмотренным выше способом конструкцию всей электромеханической части заявляемого ТВГ по сравнению с прототипом. Это касается прежде всего упрощения ее, а следовательно, и заявляемого ТВГ в целом, и улучшения основных технико-эксплуатационных качеств последнего.
Электронная система заявляемого ТВГ способна функционировать в условиях достаточно жесткого ограничения габаритов, массы и энергопотребления при воздействии экстремальных по величине температур и вибраций с обеспечением эффективного управления колебаниями резонатора, высокой точности измерений считываемой информации, последующего программного преобразования и соответствующей обработки ее, быстродействия и необходимой надежности функционирования гироскопа при полной автоматизации рабочего процесса.
Изящен и достаточно эффективен реализованный в ней способ защиты слаботочных (измерительных) цепей от воздействия на них со стороны используемых для передачи сигналов управления силовых цепей, электрических наводок (операции измерения и управления в заявляемом ТВГ просто разнесены во времени, и, в результате, в процессе считывания и передачи измеряемой информации силовые цепи системы обесточены и не оказывают никакого воздействия в этот момент на слаботочные).
Электронная система 7 заявляемого ТВГ сопряжена с проходными электрическими гермовыводами модуля 3 через подсоединяемый к располагаемым снаружи ножкам 39 их штыревых контактов 34 (см. фиг.1) предварительный усилитель (ПУ) сигналов.
Указанный усилитель встроен непосредственно в саму конструкцию электромеханической части заявляемого ТВГ с минимизацией протяженности линий связи его с точками съема измеряемой информации почти до нулевого уровня. Поэтому поступающие на него электрические сигналы практически не ослабляются.
Выходящие наружу ножки 39 штыревых контактов 34 проходных электрических гермовыводов 35 комбинированной платы 41 и подсоединяемого к ним ПУ сигналов экранированы извне при помощи общего пристыковываемого к вакуумируемому корпусу 1 тонкостенного защитного металлического кожуха 65.
Указанный кожух обеспечивает эффективную защиту упомянутых выше элементов конструкции заявляемого ТВГ от механических повреждений и внешних электровоздействий при транспортировке и эксплуатации.
Токопроводы 66 ПУ сформированы в компактный жгут 67, выведенный наружу сквозь эластичный проход 68 в донной части 69 кожуха 65.
Благодаря этому они имеют упорядоченный вид, практически не мешают транспортировке и достаточно удобно без особых затруднений располагаются в монтажном объеме объекта.
Упругая оболочка 13 резонатора 4 и локальные электроды 24-31 платы 41 в поперечном сечении имеют круговую (кольцевую) форму. При этом электроды 24-31 занимают относительно оболочки 13 строго фиксированное (неподвижное) положение, поскольку плата 41 жестко скреплена с вакуумируемым корпусом 1. Зазор 15 между указанными деталями 13 и 24-31 постоянен по всему периметру и имеет кольцевую конфигурацию.
Как уже отмечалось выше, фактическая величина его составляет порядка 100 мкм. Если упругую оболочку 13 сжать с двух сторон в пределах упругих деформаций внешней силой в радиальном направлении, диаметр ее вдоль линии действия силы соответствующим образом сократится (см. фиг.7), а перпендикулярно к указанной линии, примерно на такую же величину возрастет. Круговая в поперечном сечении форма оболочки трансформируется в эллипсную. Соответствующим образом при этом изменится и конфигурация упомянутого выше зазора 15, сечение его станет переменным.
При прекращении действия сжимающей (внешней) силы деформированная таким образом оболочка 13 резонатора 4, благодаря своей упругости, тут же приобретет исходную (круговую) форму.
То же самое произойдет с упругой оболочкой 13 резонатора 4, если проделать это и в другой, располагаемой к указанному положению под 90° позиции.
В результате рассмотренного силового воздействия при многократном его повторении, собственно, и возникают упоминавшиеся выше эллиптические колебания полусферической оболочки 13 резонатора 4 с формированием соответствующей волновой картины.
Как уже отмечалось выше, упругая оболочки 13 резонатора 4 приводится в колебательное движение при помощи внешнего переменного электрического поля. При этом изгибание указанной оболочки 13 осуществляется посредством воздействия на нее в необходимых зонах соответствующих электрических сил, реализуемых в данном поле между обкладками сферических конденсаторов 64 твердотельного волнового инерциального модуля 3.
В качестве неподвижных обкладок конденсаторов 64 служат локальные электроды 24-31 платы 41, а подвижных - примыкающие к ним через емкостный зазор 15 фрагменты 70 таких же по площади размеров металлизированной поверхности 23 упругой оболочки 13 резонатора 4.
По сути указанные конденсаторы 64 представляют собой соответствующие упоминавшиеся выше электростатические преобразователи (датчики перемещения), в которых электрическая энергия преобразуется в механическую энергию перемещения подвижной части относительно неподвижной.
Если на пару диаметрально расположенных локальных электродов комбинированной платы и металлизированную оболочку резонатора подать соответствующее напряжение (управляющий сигнал), то они окажутся заряженными равными по величине и противоположенными по знаку зарядами. В пространстве, окружающем эти заряды, возникнет соответствующее силовое поле, действующее на обкладки сферических конденсаторов. В результате, между локальными электродами платы и металлизированной поверхностью оболочки резонатора возникнут соответствующие электростатические (или т.н. Кулоновские) силы притяжения, выступающие в роли только что рассмотренных выше внешних механических сжимающих сил.
Под действием электростатических сил соответствующие фрагменты полусферической оболочки будут притягиваться к локальным электродам платы, обеспечивая в данных зонах механическое сжатие (изгиб) оболочки в пределах упругих (порядка 1 мкм) деформаций. Точно таким же образом, как и в рассмотренным выше случае, при снятии управляющих сигналов (выключении тока) будет происходить и восстановление исходной формы оболочки резонатора под действием упругих сил с формированием в процессе происходящих колебаний оболочки соответствующего спектра упоминавшихся выше стоячих волн, имеющих ряд пучностей вдоль каждой из двух взаимно перпендикулярных осей X, -X, и такого же количества узлов вдоль каждой из располагаемых посередине между ними осей Y, -Y (см. фиг.5).
Происходящее при колебаниях изменение зазора, а следовательно, и емкости в нем вызывает соответствующее изменение во времени и считываемых электрических сигналов, пропорциональное фактическим перемещениям вибрирующей оболочки резонатора.
Принцип действия заявляемого ТВГ основан на использовании Кориолисовой силы, поскольку в данном случае входная угловая скорость W взаимодействует с вектором линейной скорости V, вызывая тем самым Кориолисову силу F=2W×V. Для оболочки вектор скорости V - это, собственно, линейная скорость частиц резонатора, совершающих колебательное движение. Кориолисова сила F действует на эти частицы и вынуждает формируемую осциллирующими частицами вибрационную картину прецессировать.
В ТВГ инерциальным чувствительным элементом служит кольцевой полусферический резонатор, который будучи введенным вышерассмотренным образом в режим вибрации, обеспечивает наличие переменной линейной скорости V с частотой, равной резонансной. Из нескольких возможных мод в качестве рабочей обычно выбирают эллиптическую (n=2) с частотой собственных колебаний оболочки. Когда резонатор вращается вокруг оси симметрии относительно инерциального пространства, то каждый индивидуально резонирующий элемент массы стоячей волны дает дополнительную силу, вызывающую смещение волны относительно резонатора.
Регистрация углового смещения дает возможность определить угловое движение резонатора, и тем самым использовать его как чувствительный элемент. Причина этого углового смещения может быть качественно объяснима детальным рассмотрением эффекта Кориолисовых сил, действующих на стенки резонатора при его вращении.
Рассмотрим движение точки А, находящейся на кромке резонатора, как показано на фиг.6.
Если резонатор вращается вокруг центральной оси с постоянной угловой скоростью, то в тангенциальном направлении в этой точке будет действовать Кориолисова сила Fc. Подобным образом на противоположной стороне резонатора появится эквивалентная Кориолисова сила в тангенциальном направлении в точке А', но в противоположном направлении.
Таким образом две Кориолисовы силы в сумме создадут пару (момент) вокруг оси резонатора.
В точках В и В' радиальная составляющая скорости вращения кромки резонатора будет эквивалентна, но противоположна точкам А и А', поэтому Кориолисовы силы, создаваемые в этих точках, будут эквивалентны и противоположны силам в точках А и А' и создадут момент противоположного направления. Сумма этих двух пар сил дает составляющую силы, действующую на кромку резонатора в радиальном направлении в точке 45° в направлении действующей силы, т.е. возникнет компонента вибрации в точке 45° по отношению к первоначальной.
Величина этой компоненты пропорциональна воздействующей угловой скорости. Векторная сумма (добавка) этой компоненты с первоначальной вибрационной картинкой дает малое угловое смещение стоячей волны и, как следствие, соответствующее смещение положений узлов на поверхности резонатора.
Когда резонатор не вращается, радиальная составляющая движения узлов равна нулю, поэтому напряжение в датчиках отсутствует.
Когда резонатор вращается, датчик регистрирует радиальную составляющую движения, производимую Кориолисовыми силами и величина амплитуды колебаний пропорциональна действующей угловой скорости основания (вакуумируемого корпуса ТВГ).
В первую половину периода колебаний резонатор деформируется в максимально эллипсоидную форму, потом возвращается в сферическую. В течение следующей половины периода колебаний аналогичная деформация возникает под углом 90°.
Результат таких колебаний - стоячая волна с четырьмя узлами 18 и четырьмя пучностями 19 (см. фиг.7).
Как показано на фиг.7, стоячая волна ориентирована пучностью по направлению метки 71 на основании (вакуумируемом корпусе 1). Когда основание поворачивается на 90°, пучности прецессируют на угол, составляющий 0,3 от угла поворота основания, и, в действительности, равный 27°. Таким образом стоячая волна отстает от резонатора на 70% от угла поворота основания. Эта прецессия и есть основной эффект, который используется в ТВГ.
Общее управление работой заявляемого ТВГ осуществляется электронной системой 7, структурная схема которой представлена на фиг.13.
В составе системы 7 имеется микропроцессор (МП), обеспечивающий возбуждение и поддержание колебаний резонатора 4 с заданной амплитудой, постоянной частотой и фазой, независимо от фактической ориентации колебательной картины, и измерение, преобразование и соответствующую обработку считываемой информации. В соответствии с заложенными в него алгоритмами управление указанным процессом строится по циклическому принципу.
МП формирует разбиваемый во времени на интервалы измерения и управления и включающий в себя некоторое количество периодов колебаний резонатора 4 рабочий цикл, с неоднократно повторяемым через равные промежутки времени измерением в импульсном режиме на первом из указанных интервалов в течение одного периода колебаний их исходных параметров, представляющих собой амплитуду синфазных и квадратурных колебаний по оси X, а в течение очередного периода - по оси Y и квадратурной обратной результатов измерений по всем выборкам с вычислением параметров, отображающих азимутальную информацию, и последующим формированием на втором интервале цикла соответствующих управляющих импульсов.
Обмен данными между МП, с одной стороны, и твердотельным волновым инерциальным модулем 3 заявляемого ТВГ, с другой, осуществляется через соответствующие каналы связи 72.
Считываемые с металлизированной поверхности 23 полусферической оболочки 13 резонатора 4 через ножку 43 его двухстороннего держателя 14 сигналы усиливаются БУ (ПУ) до необходимого уровня и поступают на вход АЦП.
АЦП осуществляет автоматическое преобразование (измерение и кодирование) непрерывно изменяющихся во времени аналоговых значений указанных сигналов в эквивалентные им значения числовых кодов, т.к. МП работает только с цифровыми сигналами.
МП обрабатывает получаемую с выходов АЦП и БУ (ПУ) информацию и с учетом результатов обработки (вычислений) формирует соответствующие управляющие сигналы. Твердотельный волновой инерциальный модуль 3 заявляемого ТВГ использует управляющие сигналы (ток) в непрерывной (аналоговой) форме. Декодирование выдаваемых с выходов МП сигналов управления, представленных цифровыми кодами, в эквивалентные им значения управляющего напряжения автоматически осуществляется формирователями ШИМX, ШИМY. Преобразованные таким образом управляющие сигналы с выходов ШИМX, ШИМY поступают на соответствующие пары локальных электродов 24-31 платы 41 по каналам Х и Y, обеспечивая необходимое управление колебаниями вибрирующей оболочки 13 резонатора 4.
В заявляемом ТВГ использованы широко применяемые в навигационном приборостроении современные высококачественные отечественные материалы и комплектующие элементы, не уступающие по техническим характеристикам зарубежным, рациональные технические решения и прогрессивная технология изготовления.
Одним из уникальных свойств заявляемого ТВГ является способность его некоторое время сохранять колебания резонатора без подпитки извне. В течение этого времени (80-120 с) форма волны практически не меняется, и следовательно, гироскопический прибор сохраняет инерциальную информацию при случайном кратковременном прерывании электропитания.
Конструкция заявляемого ТВГ предельно проста и обладает высокими потребительскими качествами. Миниатюрность исполнения, обтекаемые формы, стройность и изящность линий, визуальная упорядоченность компоновки заявляемого ТВГ свидетельствует о высокой степени совершенства и качества изделия.
К основным достоинствам заявляемого ТВГ несомненно следует отнести:
- рациональность металлоконструкции вакуумируемого корпуса, основных функциональных деталей твердотельного волнового инерциального модуля и ТВГ в целом;
- оригинальность и высокую плотность компоновки;
- миниатюрность исполнения;
- высокую технологичность, надежность работы в экстремальных условиях и точностные характеристики;
- высокоэффективную электронику, построенную на современной элементной базе;
- малое время подготовки к работе;
- удобство монтажа и обслуживания;
- чрезвычайно широкую область использования и умеренную стоимость.
Заложенные в него схемно-конструкторские, технологические и другие технические решения в целом позволяют поднять уровень отечественной гироскопической аппаратуры данного назначения по ее функциональным возможностям и технико-эксплутационным и экономическим показателям до современного и, на этой основе, значительно повысить конкурентоспособность аппаратуры рассматриваемого класса.
Заявляемый ТВГ относится к высокоинтеллектуальной наукоемкой продукции.
С учетом вышеизложенного он может быть многократно воспроизведен по разработанной на него документации в условиях серийного производства на специализированных приборостроительных предприятиях, располагающих необходимыми для этого оборудованием, технологиями, персоналом и соответствующей нормативно-разрешающей базой.
В настоящее время на заявляемый ТВГ полностью разработана соответствующая конструкторская документация, по которой изготовлен и испытан в лабораторных условиях действующий полномасштабный макет, имеющий следующие технические характеристики:
Эффективность заложенных в конструкцию заявляемого ТВГ решений, а также возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в устранении перечисленных выше недостатков известных аналогов и прототипа, а именно: улучшение его технико-эксплутационных качеств, позволяющих достигнуть современного технического уровня, высокой конкурентоспособности навигационной аппаратуры такого класса и сокращения сроков и стоимости создания, - подтверждены соответствующими расчетами и результатами испытаний.
Комплексные испытания заявляемого ТВГ в составе бортовой инерциальной навигационной системы запланированы на 2008 год. Решение о серийном производстве заявляемого ТВГ будет принято после завершения указанных испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП | 2022 |
|
RU2793299C1 |
| ОСЕСИММЕТРИЧНЫЙ КОРИОЛИСОВЫЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2476824C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2008 |
|
RU2362975C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа | 2017 |
|
RU2688834C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| Способ контроля физических параметров резонатора твердотельного волнового гироскопа | 2021 |
|
RU2783189C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ В ЧУВСТВИТЕЛЬНОМ ЭЛЕМЕНТЕ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518632C2 |
Изобретение относится к твердотельным волновым гироскопам (ТВГ) миниатюрного исполнения, используемым для определения угловой скорости подвижных объектов. ТВГ выполнен в виде размещаемого в вакуумируемом металлическом корпусе с обеспечением фиксации твердотельного волнового инерциального модуля, включающего в себя изготовленные из кварцевого стекла, с металлизацией рабочих поверхностей, и жестко скрепленные между собой полусферический резонатор и плату съема/возбуждения. Управление работой ТВГ осуществляется электронной системой. В составе системы имеется микропроцессор, обеспечивающий возбуждение колебаний резонатора в необходимом режиме, измерение, преобразование и обработку считываемой с вибрирующей оболочки резонатора азимутальной информации. Техническим результатом является улучшение технико-эксплуатационных качеств, сокращение сроков создания и стоимости ТВГ. 6 з.п. ф-лы, 13 ил.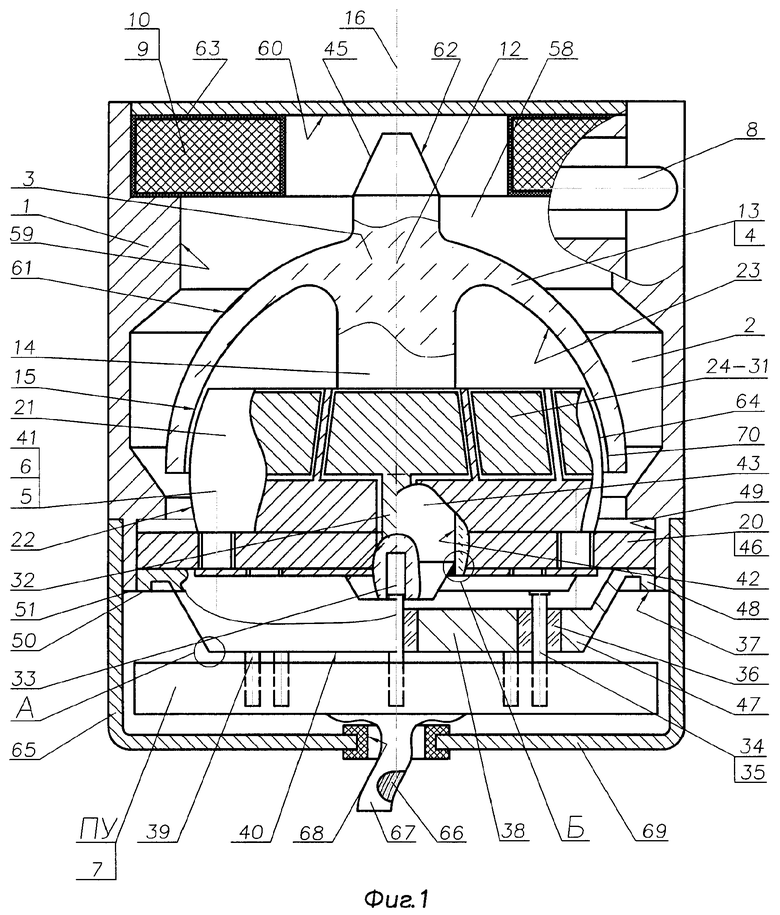
1. Малогабаритный твердотельный волновой гироскоп (ТВГ), содержащий металлический вакуумируемый корпус, снабженный штенгелем, представляющим собой откачное гнездо ниппельного типа для подсоединения к технологической вакуумной камере и отстыковки от нее после вакуумирования, газопоглотителем с активируемым рабочим веществом и соответствующими установочно-присоединительными элементами, во внутренней полости которого размещен, с обеспечением фиксации, твердотельный волновой инерциальный модуль, включающий в себя изготовленные из кварцевого стекла, с металлизацией рабочих поверхностей, и жестко скрепленные между собой инерциальный чувствительный элемент вибрационного типа в виде способного приводиться в колебательное движение при помощи внешнего переменного электрического поля полусферического резонатора с проходящим через полюс его полусферы двусторонним держателем стержневого типа, и электростатически взаимодействующие с указанной полусферой через емкостной зазор возбудитель высокочастотных эллиптических колебаний резонатора в зоне упругих деформаций с формированием в плоскости перпендикулярной полярной оси стоячей волны, с четырьмя устойчивыми к колебаниям узловыми областями и столькими же, имеющими максимальную амплитуду отклонений пучностями, попарно ориентированными вдоль проходящих через них и равноудаленных друг от друга двух групп взаимно перпендикулярных радиальных осей, способной под воздействием входного инерциального вращения корпуса прецессировать с соответствующим изменением во времени параметров упомянутого выше поля, преобразуемым в ток, пропорциональный угловой скорости вращения, и узел съема электрических сигналов, отображающих азимутальную ориентацию колебательной картины вибрирующей оболочки резонатора, в виде плоского основания фланцевого типа с возвышающимся над ним шаровым сегментом, на наружной поверхности которого сформированы восемь обращенных к ее поверхности и попарно действующих в областях пучностей и узлов локальных электродов, соединенных при помощи соответствующих токопроводов через индивидуальные гнездовые контакты со штыревыми однопроводящими контактами проходных электрических гермовыводов, встроенных в изоляторы привариваемой к нижнему срезу вакуумируемого корпуса металлической крышки, с выходом их ножек наружу, за ее внешние обводы, и сформированный отдельно от них гермовывод такого же исполнения, электрически сообщенный с металлизированной поверхностью полусферы резонатора, а также сопряженную с указанными гермовыводами многоконтурную электронную систему, обеспечивающую возбуждение и поддержание колебаний резонатора с заданной амплитудой, постоянной частотой и фазой независимо от фактической ориентации колебательной картины, и измерение, преобразование и соответствующую обработку считываемой информации, отличающийся тем, что в нем возбудитель колебаний резонатора и узел съема электрических сигналов выполнены в виде размещаемой внутри полусферы резонатора единой монолитной детали, представляющей собой комбинированную электромеханическую плату универсального назначения, используемую как для возбуждения и поддержания колебаний вибрирующей оболочки резонатора, так и для съема электрических сигналов, со сплошной, без радиальных пазов, рабочей поверхностью, сформированная на которой группа локальных электродов, в совокупности, образует систему соответствующих емкостных датчиков перемещения и силовых электродов одновременно и является общей для решения обеих из указанных задач, полусферическая оболочка резонатора выполнена сплошной, без балансировочных зубцов, с обеспечением прецизионного уровня геометрической и массовой осевой симметрии, достигаемой, в первом случае, путем высокоточной технологии механической обработки и контроля размеров, а во втором - посредством соответствующей балансировки резонатора с разложением массового дефекта в ряд Фурье и последующим устранением первых четырех гармоник дефекта и, в частности, первых трех из них - до минимально возможного уровня, позволяющего снизить влияние азимутальной неравномерности демпфирования и уменьшить до необходимых пределов вибрационные воздействия на волновую картину, а массовый дефект четвертой, разночастотность, минимизировать до уровня, обеспечивающего нормальное функционирование электроники управления при малых значениях напряжения электропитания, резонатор закреплен консольно, по одноопорной схеме, только в соответствующем посадочном отверстии комбинированной электромеханической платы съема/возбуждения за вводимый в него внутренний наконечник - ножку двухстороннего стержневого держателя посредством соответствующего клеевого соединения или пайки, без использования каких-либо промежуточных деталей, а другой же его, наружный, наконечник укорочен, по сравнению с ножкой, по крайней мере, в несколько раз, и используется преимущественно в технологических целях и, в частности, при шлифовке детали в центрах, транспортировке и оценке ее несбалансированности через измерение амплитуды биений указанного наконечника, упоминавшаяся выше металлическая крышка введена в состав твердотельного волнового инерциального модуля и выполнена в виде жестко скрепляемой с нижним торцом основания комбинированной электромеханической платы съема/возбуждения посредством клеевого соединения или пайки и обращенной книзу дном тарели с отбортованным по краю, в зоне приварки к вакуумируемому корпусу цилиндрическим центрирующим буртиком одинакового с торцовым фланцем платы диаметра, заглубляемым при сборке в соответствующее посадочное гнездо упомянутого корпуса такой же конфигурации и размеров до совмещения их привариваемых кромок, вакуумируемый корпус может быть выполнен в виде двух, по установочно-присоединительным элементам, модификаций цилиндрической либо квадратной в поперечном сечении конфигурации, образованной, в последнем случае, одинаковыми плоскими базовыми поверхностями, ортогонально располагаемыми по отношению друг к другу, газопоглотитель размещен в свободном объеме верхнего отсека вакуумируемого корпуса, ограниченного стенками его полости и наружными поверхностями полусферы и технологического наконечника двухстороннего стержневого держателя резонатора, и может быть выполнен в виде любой из двух эквивалентных в функциональном отношении модификаций, а именно: в нормальном или бескорпусном вариантах, причем в первом случае он представляет собой полностью законченный автономный насос с заключенным в герметизируемую корпусную оболочку кольцевидной или тороидальной формы реагентом типа титан/ванадий, способным поглощать газ, активируемым после обезгаживания и герметизации вакуумируемого корпуса посредством прожигания через оптически прозрачный стеклянный иллюминатор последнего лазерным лучом либо механического вскрытия утоненной мембраны оболочки, а во втором - рабочее вещество крепится в той же зоне непосредственно к стенкам вакуумируемого корпуса и активируется путем соответствующего нагрева указанных стенок снаружи внешним тепловым излучателем, штенгель вакуумируемого корпуса может быть выполнен в виде разъединяемого посредством оплавления стеклянного либо металлического ниппеля, пережимаемого путем пластического деформирования до полного перекрытия прохода и «холодной сварки» сближаемых стенок с одновременной его обрезкой, габариты твердотельного волнового инерциального модуля, а следовательно, и вакуумируемого корпуса, минимизированы до пределов, обеспечивающих возможность компоновки их в крайне малых, до 40 мм по диаметру, монтажных объемах как при продольной, так и поперечной ориентации оси чувствительности, электронная система выполнена адаптивной, основные контуры ее и, в частности, измерения и управления колебаниями построены на цифровой, малочувствительной к экстремальным условиям эксплуатации, элементной базе с минимизацией количества, размеров и рассеиваемой мощности электронных компонент, использованием импульсных сигналов управления и съема и закладкой соответствующих алгоритмов обработки данных и управления во введенный в состав указанной системы микропроцессор, обеспечивающий функционирование упомянутых контуров в импульсном режиме с формированием рабочего цикла, разделяемого во времени на интервалы измерения и управления и использованием при регистрации выходных электрических сигналов способа «обратного» включения, когда они снимаются с ножки двухстороннего стержневого держателя резонатора.
2. Малогабаритный ТВГ по п.1, отличающийся тем, что в нем упоминавшийся выше отдельный проходной гермовывод, сообщенный с металлизированной поверхностью полусферы резонатора, размещен на комбинированной электромеханической плате съема/возбуждения со встраиванием гнездового контакта непосредственно в ножку двухстороннего стержневого держателя резонатора и расположением сопрягаемого с ним штыревого однопроводящего контакта прямо по центру дна тарельчатой металлической крышки твердотельного волнового инерциального модуля.
3. Малогабаритный ТВГ по п.1, отличающийся тем, что в нем величина емкостного зазора между обращенными друг к другу поверхностями полусферы резонатора и локальных электродов комбинированной электромеханической платы съема/возбуждения порядка 100 мкм выбрана, исходя из низковольтного питания электроники и возможности технической осуществимости геометрического контроля его при сборке.
4. Малогабаритный ТВГ по п.1, отличающийся тем, что в нем регистрация электрических сигналов и управления колебаниями резонатора замкнуты на одни и те же электроды соединенными с однотипными проходными электрическими гермовыводами комбинированной электромеханической платы съема/возбуждения упомянутого выше исполнения.
5. Малогабаритный ТВГ по п.1, отличающийся тем, что в нем электронная система сопряжена с проходными электрическими гермовыводами комбинированной электромеханической платы через подсоединяемый к располагаемым снаружи ножкам их штыревых контактов предварительный усилитель сигналов.
6. Малогабаритный ТВГ по п.1, отличающийся тем, что в нем выходящие наружу ножки штыревых контактов проходных электрических гермовыводов комбинированной электромеханической платы и подсоединенный к ним предварительный усилитель сигналов обеспечены общей экранировкой при помощи пристыковываемого к вакуумируемому корпусу тонкостенного защитного металлического кожуха.
7. Малогабаритный ТВГ по п.1, отличающийся тем, что в нем токопроводы предварительного усилителя сформированы в компактный жгут, выводимый наружу сквозь эластичный проход в донной части кожуха.
| Способ получения гомогенной полимерной мембраны | 1960 |
|
SU141621A1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2000 |
|
RU2168702C1 |
| СПОСОБ БАЛАНСИРОВКИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1998 |
|
RU2147117C1 |
| Вибрационный гироскоп | 1954 |
|
SU438327A1 |
| US 4157041, 05.06.1979 | |||
| US 6357296 B1, 19.03.2002. | |||

