Изобретение относится к области электромеханики и пьезотехники, оно может быть использовано для привода различных устройств в прецизионном приборостроении, в оптических системах, в системах нанотехнологий.
Известна пьезокерамическая многослойная деталь для измерительных приборов [1], которая выполнена из пьезоэлектрических элементов пакетным способом. Она предназначена для создания пьезоэлектрических приводов или сенсорных элементов и исключает асимметрию формы электродов, при которой на одной стороне предусмотрена выступающая часть для соединения с шиной, а на противоположенной стороне имеется изолированный зазор для другой шины, что повышает величину относительного коэффициента трансверсальной трансформации. Ее недостатком является невозможность одновременного использования в качестве исполнительного механизма (актюатора) и в качестве сенсорного элемента (датчика).
Наиболее близким по технической сущности к предлагаемому решению является твердотельное исполнительное устройство [2] (прототип). Оно содержит многослойный блок из сегнетоэлектрических керамических элементов, две консоли, закрепленные на рабочем органе (элементе конструкции механической системы), и узел предварительного поджатия, закрепляющий многослойный блок. Многослойный блок электрически разделен на две секции, элементы которых соединены электрически параллельно. Первая секция (электромеханический преобразователь) подключена к выходу регулятора, содержащего процессор и усилитель. Вторая секция (механоэлектрический преобразователь) подключена к измерителю емкости, содержащему генератор и детектор. Выход измерителя емкости подключен к одному из входов процессора. К другому входу процессора подключен выход акселерометра, установленного на рабочем органе. Элементы многослойного блока снабжены электродами из воженного серебра и соединены термодиффузионной варкой. Механоэлектрическая секция, совместно с измерителем емкости, включена в цепь обратной связи, позволяющую учитывать обратимые изменения характеристик. Таким образом, прототип представляет собой пьезоэлектрический электромеханический преобразователь (самочувствительный многослойный пьезоэлектрический актюатор), состоящий из пьезокерамических секций с входными электродами для подключения к источнику питания и выходными электродами, подключенными к формирователю электрического сигнала, включающий поляризованное керамическое тело - пьезоэлемент в виде пластины с электродами, нанесенными на его противоположные плоские поверхности (грани).
Это устройство работает следующим образом. При возникновении вибрации в механической системе, в частности - в элементе конструкции, который является рабочим органом системы активного управления вибрациями, акселерометр, жестко связанный с элементом конструкции (системы активного управления вибрациями), выдает сигнал, пропорциональный ускорению. Сигнал с акселерометра поступает на вход процессора (регулятора). Процессор вырабатывает управляющий сигнал, амплитуда и фаза которого рассчитываются по заданному в регуляторе алгоритму. Усиленный управляющий сигнал с выхода усилителя поступает на первую секцию многослойного блока. В этой секции, вследствие электрострикционного эффекта, происходит электромеханическое преобразование энергии, результатом которого является усилие, развиваемое в многослойном блоке вдоль его оси и приложенное к двум консолям. Предварительное поджатие многослойного блока при помощи узла предварительного поджатия не допускает появления в многослойном блоке растягивающих механических напряжений, нежелательных в керамическом материале. Механическое воздействие многослойного блока на рабочий орган происходит в виде пары вращающих моментов в местах установки двух консолей. Величина вращающего момента равна произведению усилия, развиваемого многослойным блоком, на величину смещения h его оси относительно поверхности рабочего органа. Вращающие моменты создают в рабочем органе изгибные механические напряжения, которые способствуют гашению вибраций в механической системе. Одновременно с электромеханическим преобразованием в первой секции, воздействующим на рабочий орган, во второй секции многослойного блока происходит механоэлектрическое преобразование, изменяющее величину диэлектрической проницаемости сегнетоэлектрического материала с размытым фазовым переходом и величину емкости второй секции. Вторая секция является частотно-задающим элементом генератора измерителя емкости. При увеличении механического напряжения в многослойном блоке величина емкости второй секции уменьшается и соответственно увеличивается частота генератора и величина сигнала на выходе детектора. Сигнал с выхода измерителя емкости, пропорциональный усилию, развиваемому многослойным блоком, поступает на вход регулятора. В соответствии с реальным значением усилия, развиваемого многослойным блоком, происходит коррекция выходного сигнала регулятора, т.е. вводится обратная связь в систему активного управления вибрациями, учитывающая обратимые изменения электромеханических характеристик.
Недостатком прототипа является необходимость в дополнительной секции, которая используется в качестве сенсорного элемента (датчика) для получения сигнала обратной связи. Это приводит к увеличению габаритных размеров и стоимости устройства.
Задачей предлагаемого изобретения является создание самочувствительного многослойного пьезоэлектрического актюатора (пьезоактюатора), который имеет относительно простую конструкцию, уменьшенные габаритные размеры, высокую точность позиционирования без применения внешних датчиков, повышенную надежность и технологичность изготовления.
Техническим результатом изобретения является упрощение конструкции пьезоэлектрического актюатора, повышение надежности, уменьшение габаритных размеров, обеспечение высокой точности управления перемещением, расширение функциональных возможностей актюатора.
Это достигается тем, что в самочувствительном многослойном пьезоэлектрическом актюаторе - пьезоэлектрическом электромеханическом преобразователе, состоящем из пьезокерамических секций с входными электродами для подключения к источнику питания и выходными электродами, подключенными к формирователю электрического сигнала, включающем поляризованное керамическое тело - пьезоэлемент в виде пластины с электродами, нанесенными на его противоположные плоские поверхности (грани), в соответствии с предлагаемым изобретением каждая пьезокерамическая секция состоит из пары соединенных механически друг с другом пьезоэлементов, имеющих на одной плоской поверхности (грани) по одному (одиночному) плоскому электроду, а на другой противоположной плоской поверхности (грани) по два плоских электрода, установленных так, что два плоских электрода одного пьезоэлемента обращены к двум плоским электродам другого пьезоэлемента, причем смежные электроды внутри секции соединены электрически и являются выходными (измерительными) электродами пьезокерамической секции, которые подключены к измерительным входам формирователя электрического сигнала, состоящего из измерительного преобразователя емкостного типа, последовательно соединенного с блоком установки и саморегулирования управляющего напряжения, имеющего управляющий вход, при этом входными (управляющими) электродами пьезокерамической секции являются одиночный плоский электрод одного пьезоэлемента и одиночный плоский электрод другого пьезоэлемента, расположенные снаружи такой секции, которые подключены к выходу блока установки и саморегулирования управляющего напряжения.
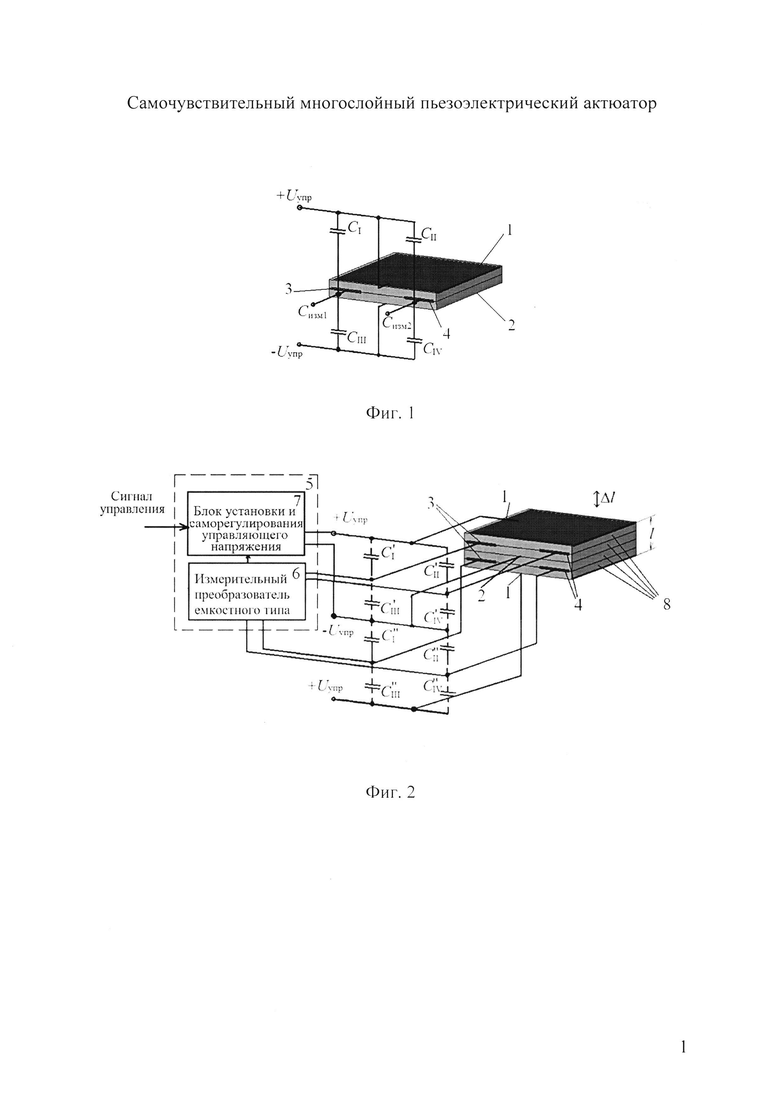
На фиг. 1 показана структура и схема включения одной пьезокерамической секции (из двух пьезоэлементов) самочувствительного многослойного пьезоэлектрического актюатора.
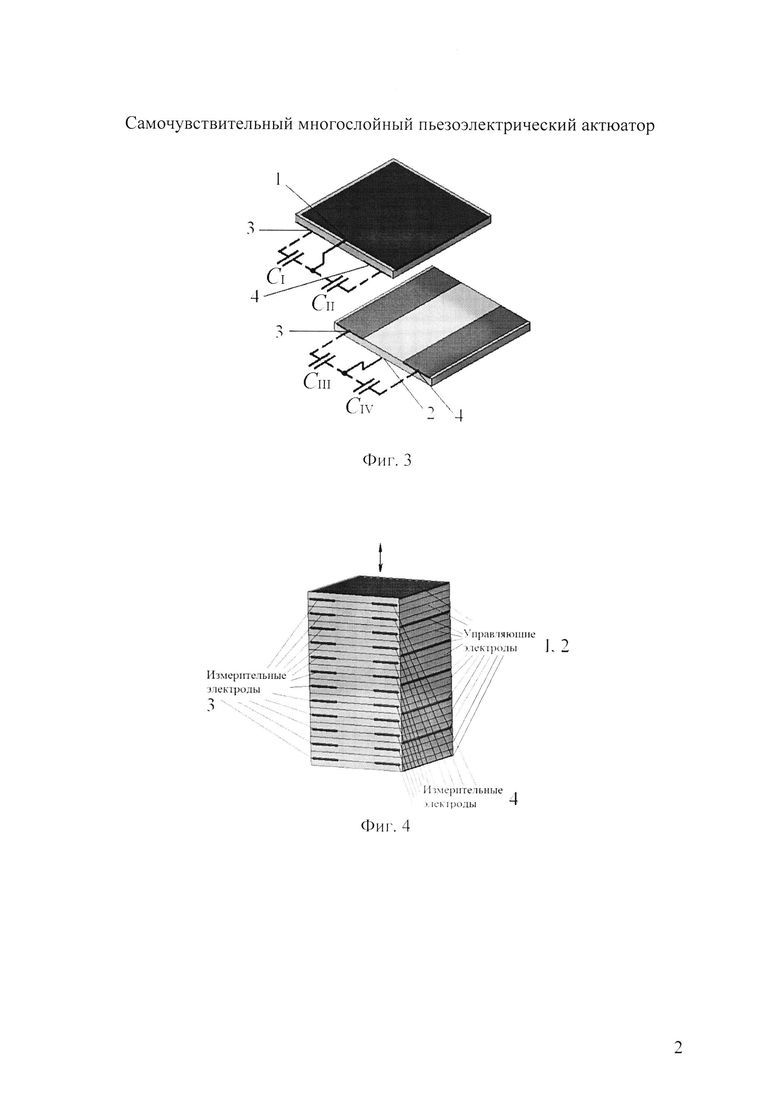
На фиг. 2 показана структурная схема двухсекционного (четырехслойного) самочувствительного многослойного пьезоэлектрического актюатора, подключенного одновременно к управляющей цепи и к мостовой измерительной цепи.
На фиг. 3 показана 3D-модель двух отдельных слоев пьезоэлектрического актюатора.
На фиг. 4 показана 3D-модель самочувствительного многослойного пьезоэлектрического актюатора, состоящего из 12 секций (24 слоев), и схема расположения управляющих и измерительных электродов.
На фиг. 5 показан вариант структурной схемы управления самочувствительным многослойным пьезоэлектрическим актюатором.
Самочувствительный многослойный пьезоэлектрический актюатор - пьезоэлектрический электромеханический преобразователь - состоит из пьезокерамических секций (см. фиг. 1) с входными электродами 1 и 2 для подключения к источнику питания (электрического напряжения Uупр) и выходными электродами 3 и 4, подключенными к формирователю электрического сигнала 5 (состоящему из измерительного преобразователя емкостного типа 6 и блока установки и саморегулирования управляющего напряжения 7), как показано на фиг. 2. Каждая пьезокерамическая секция включает поляризованное керамическое тело 8 - пьезоэлемент в виде пластины с электродами 1-4 (см. фиг. 3), нанесенными на его плоские поверхности (грани). Каждая пьезокерамическая секция (фиг. 1) состоит из пары соединенных механически друг с другом пьезоэлементов, имеющих на одной плоской поверхности (грани) по одному (одиночному) плоскому электроду 1 и 2, а на другой противоположной плоской поверхности (грани) по два плоских электрода 3 и 4, установленных так, что два плоских электрода одного пьезоэлемента 3 и 4 обращены к двум плоским электродам 3 и 4 другого пьезоэлемента, причем два плоских электрода 3 и 4 одного пьезоэлемента электрически соединены внутри пьезокерамической секции с двумя такими же плоскими электродами 3 и 4 другого пьезоэлемента соответственно, то есть смежные электроды внутри секции соединены электрически и являются выходными (измерительными) электродами пьезокерамической секции (фиг. 1), которые подключены к измерительным входам формирователя электрического сигнала 5 (фиг. 2), состоящего из измерительного преобразователя емкостного типа 6, последовательно соединенного с блоком установки и саморегулирования управляющего напряжения 7, имеющего управляющий вход, на который подается сигнал управления. При этом входными (управляющими) электродами пьезокерамической секции являются одиночный плоский электрод 1 одного пьезоэлемента и одиночный плоский электрод 2 другого пьезоэлемента, расположенные снаружи такой секции, которые подключены к выходу блока установки и саморегулирования управляющего напряжения. Выходные электроды формирователя электрического сигнала 5 (выход блока установки и саморегулирования управляющего напряжения) для подачи электрического напряжения Uупр подключены к плоским электродам 1 и 2 пьезокерамической секции (пары пьезоэлементов со стороны их плоской поверхности (грани), на которой сформированы по одному плоскому электроду).
Направление поляризации пьезоэлементов в пьезокерамической секции (фиг. 1) одинаковое, а в соседних секциях - противоположное. Из фиг. 1-3 видно, что с одной стороны пьезоэлементов по всей площади выполнен управляющий плоский электрод 1 (2), а с противоположной стороны - два одинаковых симметрично расположенных измерительных плоских электрода 3 и 4. Пьезоэлементы в одной секции расположены так, что их измерительные плоские электроды совмещены друг с другом и образуют электрическое соединение. Управляющие плоские электроды 1 и 2 двух соседних секций также образуют электрическое соединение. Измерительные плоские электроды в каждой секции образуют четыре конденсатора (СI, СII, СIII, CIV), последовательно соединенные через управляющие электроды, емкость которых изменяется от расширения (сжатия) пьезоэлементов при подаче напряжения Uупр на их управляющие электроды (фиг. 1, фиг. 3). При использовании двух секций (фиг. 2) измерительные плоские электроды первой секции, образующие первые четыре конденсатора (СI', СII', СIII', СIV'), подключены к одному плечу мостовой измерительной цепи, а измерительные плоские электроды второй секции, образующие вторые четыре конденсатора (СI'', СII'', СIII'', СIV''), подключены к противоположному плечу мостовой измерительной цепи. Управляющие плоские электроды 1 и 2 пьезоэлементов электрически соединяются параллельно, причем электроды одной полярности выходят на поверхность пьезоактюатора с одной стороны, а противоположной полярности - с противоположной стороны (фиг. 2). Измерительные плоские электроды 3 и 4 пьезоэлементов также соединены параллельно таким образом, чтобы образовать два одинаковых измерительных конденсатора переменной емкости. Измерительные плоские электроды 3 и 4 гальванически не связаны с управляющим высоковольтным напряжением. Данная структура дает возможность подключения пьезоактюатора одновременно к высоковольтной управляющей цепи и к низковольтной измерительной цепи.
Самочувствительный многослойный пьезоэлектрический актюатор может состоять из различного количества секций. Так, на фиг. 4 показан самочувствительный многослойный пьезоэлектрический актюатор, состоящий из 12 секций (24 слоев), и схема расположения управляющих и измерительных (плоских) электродов.
Принцип действия самочувствительного многослойного пьезоактюатора основан на том, что пьезокерамика является диэлектриком с высокой диэлектрической проницаемостью, поэтому электроды (обкладки) на противоположных сторонах пьезокерамических пластин образуют конденсаторы с достаточно большой емкостью (от единиц пикофарад до сотен нанофарад). Емкость С между двумя параллельными поверхностями пропорциональна площади области между поверхностями и обратно пропорциональна расстоянию между поверхностями:

где ε0 - диэлектрическая постоянная в вакууме; εr - относительная диэлектрическая постоянная диэлектрика, A - площадь области между поверхностями, и h - расстояние между поверхностями.
При подаче к рабочим обкладкам пьезоактюатора управляющего напряжения он удлиняется в этом направлении на величину Δh:

где d33 - пьезомодуль, Uупр - управляющее напряжение. Соответственно изменяется расстояние между электродами (обкладками) измерительных конденсаторов на поверхности пьезоактюатора и их емкость.
В отличие от внешних емкостных датчиков в данной структуре практически отсутствует нелинейность, связанная с наклоном (угол между двумя параллельными пластинами) и прогибанием (глубина вогнутости или выпуклости) пьезоэлементов.
Для перемещения пьезоэлектрического актюатора на требуемое расстояние блок установки и саморегулирования управляющего напряжения формирователя электрического сигнала 5 в соответствии с заданным значением сигнала управления подает к управляющим плоским электродам 1 и 2 (обкладкам) пьезоактюатора высоковольтный управляющий сигнал Uупр (фиг. 2). При этом пьезоэлементы деформируются (удлиняются или укорачиваются), пьезоактюатор совершает перемещение и изменяется емкость конденсаторов, образованных измерительными плоскими электродами 3 и 4. Изменение емкости преобразуется с помощью измерительного преобразователя емкостного типа, например, состоящего из мостовой измерительной цепи и частотного измерительного преобразователя, в сигнал обратной связи, который подается на корректирующий вход блока установки и саморегулирования управляющего напряжения, где определяется отклонение реального перемещения от заданного и производится соответствующая коррекция управляющего сигнала.
Один из вариантов схемы управления самочувствительным многослойным пьезоэлектрическим актюатором (далее, пьезоактюатором) показан на фиг. 5, где измерительный преобразователь емкостного типа 6 формирователя электрического сигнала 5 представляет собой мостовую измерительную цепь с двумя рабочими плечами, образованными из конденсаторов пьезоэлектрического актюатора, которая подключена к частотному измерительному преобразователю. Изменение емкостей пьезоактюатора 9 с помощью мостовой измерительной цепи 10 преобразуется в напряжение, подаваемое на вход интегратора 11. На выходе компаратора 12 генерируется сигнал прямоугольной формы типа «меандр» с частотой, пропорциональной перемещению пьезоактюатора 9. Сигнал управления пьезоактюатором 9 поступает на него от блока установки и саморегулирования управляющего напряжения, состоящего из блока задания частоты 13 элемента сравнения 14, блока регулирования управляющего напряжения 15, блока формирования управляющего напряжения 16, усилителя напряжения 17. Изменение емкостей измерительных конденсаторов (СI, СII, СIII, CIV) пьезоактюатора 9 приводит к разбалансу мостовой измерительной цепи, в которую они включены. Питание мостовой измерительной цепи 10 осуществляется двухполярным напряжением питания типа «меандр» с выхода компаратора 12. Разбаланс мостовой измерительной цепи 10 вызывает изменение частоты сигнала на выходе компаратора 12, который далее поступает на усилитель тока 18 и затем на оптопару 19 (служит для гальванической развязки). С выхода оптопары 19 частотный сигнал поступает на блок задания частоты 13 и элемент сравнения 14, который сравнивает этот сигнал с частотой сигнала, поступающего с блока задания частоты 13.
Блок задания частоты 13 имеет два входа. На первый вход подается внешний сигнал управления (аналоговый или кодовый). На второй вход поступает частотный сигнал с выхода оптопары 19, который используется для установки начальной частоты выходного частотного сигнала блока задания частоты 13. Такая установка производится при включении питания, а также может быть осуществлена при каждом возврате пьезоактюатора в исходное состояние (нулевую точку или точку начала отсчета). То есть, по сигналу с выхода оптопары 19 производится коррекция управляющего сигнала на выходе блока задания частоты 13 (подстройка частоты начального управляющего сигнала с выхода блока задания частоты 13 под начальную частоту сигнала с выхода интегратора 11).
При последующем изменении управляющего сигнала на блоке задания частоты 13 сигнал с выхода оптопары 19 не используется. Элемент сравнения 14 выделяет разностный сигнал между управляющим сигналом от блока задания частоты 13 и сигналом обратной связи, поступающим от оптопары 19.
Далее разностный сигнал с элемента сравнения 14 подается на блок регулирования управляющего напряжения 15, на этот же блок подается сигнал с блока задания частоты 13. В блоке регулирования управляющего напряжения 15 корректируется сигнал управления на величину, пропорциональную сигналу от элемента сравнения 14. Далее, с блока регулирования управляющего напряжения 15 скорректированный сигнал поступает на блок формирования управляющего напряжения 16, который формирует аналоговый сигнал, поступающий на пьезоактюатор 9 через усилитель напряжения 17 (выход блока установки и саморегулирования управляющего напряжения 7 формирователя электрического сигнала 5).
В результате в самочувствительном многослойном пьезоэлектрическом актюаторе нелинейность зависимости его перемещения от управляющего напряжения, возникающая из-за гистерезиса, ползучести и последействия, устраняется путем коррекции частотного сигнала, поступающего на блок регулирования управляющего напряжения 15, на величину фактического отклонения частоты сигнала с выхода интегратора 11 от частоты сигнала управления с блока задания частоты 13.
Предлагаемый самочувствительный многослойный пьезоэлектрический актюатор по сравнению с прототипом имеет уменьшенные габаритные размеры, повышенную надежность, благодаря тому, что не требуется отдельный датчик перемещения, а для контроля перемещения (деформации) пьезоэлектрического актюатора используется сам пьезоэлектрический актюатор (самочувствительный пьезоактюатор). При этом обеспечивается высокая точность позиционирования, повышенная надежность и технологичность изготовления.
Таким образом, благодаря отличительным признакам изобретения упрощается конструкция пьезоэлектрического актюатора, повышается его надежность, уменьшаются габаритные размеры, обеспечивается высокая точность позиционирования.
Предлагаемое устройство выгодно отличается от известных ранее и может найти широкое применение в приводах различных устройств в прецизионном приборостроении, в оптических системах, в системах нано- и микропозиционирования.
Источники информации, принятые во внимание при экспертизе
1. Лопатин Сергей, Гетман Игорь, Панич Анатолий, Вусевкер Юрий. Патент №RU 2264678. Пьезокерамическая многослойная деталь для измерительных приборов и способ ее изготовления. Опубл. 20.11.2005.
2. Панич А.Е. (RU), Дудкин В.В. (RU), Житомирский Г.А. Патент № RU 2230353. Твердотельное исполнительное устройство. Опубл. 10.06.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2603353C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| ПЬЕЗОАКТЮАТОР (ВАРИАНТЫ) | 2018 |
|
RU2690732C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПЬЕЗОЧУВСТВИТЕЛЬНОСТИ БИМОРФА ИЗГИБНОГО ТИПА | 2022 |
|
RU2778161C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОКЕРАМИЧЕСКИЙ КОРРЕКТОР УГЛОВ НАКЛОНА ВОЛНОВОГО ФРОНТА | 2024 |
|
RU2837501C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2822976C1 |

Изобретение относится к области метрологии. Пьезоэлектрический актюатор содержит пьезокерамические секции, каждая из которых состоит из пары соединенных механически друг с другом пьезоэлементов, имеющих на одной плоской поверхности грани по одному плоскому электроду, а на другой противоположной плоской поверхности по два плоских электрода, установленных так, что два плоских электрода одного пьезоэлемента обращены к двум плоским электродам другого пьезоэлемента внутри пьезокерамической секции. Причем два электрода одного пьезоэлемента электрически соединены с двумя электродами другого пьезоэлемента соответственно и являются измерительными электродами пьезокерамической секции, которые подключены к измерительным входам формирователя электрического сигнала, состоящего из измерительного преобразователя емкостного типа, последовательно соединенного с блоком установки и саморегулирования управляющего напряжения, имеющего управляющий вход. Входными управляющими электродами пьезокерамической секции являются одиночный плоский электрод одного пьезоэлемента и одиночный плоский электрод другого пьезоэлемента, расположенные снаружи такой секции, которые подключены к выходу блока установки и саморегулирования управляющего напряжения. Технический результат – повышение надежности и точности управления. 5 ил.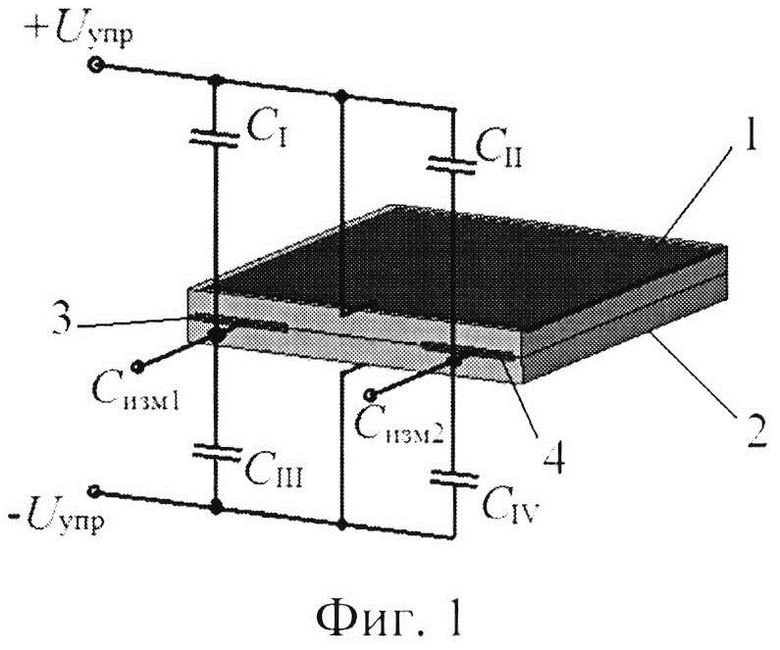
Самочувствительный многослойный пьезоэлектрический актюатор - пьезоэлектрический электромеханический преобразователь, состоящий из пьезокерамических секций с входными электродами и выходными электродами, подключенными к формирователю электрического сигнала, включающий поляризованное керамическое тело - пьезоэлемент в виде пластины с электродами, нанесенными на его противоположные плоские поверхности (грани), отличающийся тем, что каждая пьезокерамическая секция состоит из пары соединенных механически друг с другом пьезоэлементов, имеющих на одной плоской поверхности (грани) по одному (одиночному) плоскому электроду, а на другой противоположной плоской поверхности (грани) по два плоских электрода, установленных так, что два плоских электрода одного пьезоэлемента обращены к двум плоским электродам другого пьезоэлемента, причем смежные электроды внутри секции соединены электрически и являются выходными (измерительными) электродами пьезокерамической секции, которые подключены к измерительным входам формирователя электрического сигнала, состоящего из измерительного преобразователя емкостного типа, последовательно соединенного с блоком установки и саморегулирования управляющего напряжения, имеющего управляющий вход, при этом входными (управляющими) электродами пьезокерамической секции являются одиночный плоский электрод одного пьезоэлемента и одиночный плоский электрод другого пьезоэлемента, расположенные снаружи такой секции, которые подключены к выходу блока установки и саморегулирования управляющего напряжения.
| Бардин В | |||
| А | |||
| Системы управления высокоточными устройствами позиционирования на основе пьезоэлектрических актюаторов // Автореферат диссертации на соискание ученой степени кандидата технических наук, Пенза, 26.10.2015, стр | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 6066911 A, 23.05.2000 | |||
| А | |||
| Г | |||
| Амельченко и др | |||
| СИСТЕМЫ УПРАВЛЕНИЯ И ЭЛЕМЕНТЫ УСИЛИВАЮЩЕГО ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКТЮАТОРА ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ //Технические науки | |||
| Электроника, измерительная и радиотехника 3 (35), 2015 | |||
| JP 2000277823 A, 06.10.2000 | |||
| WO 2012084334 A1, 28.06.2012 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИБОР | 2010 |
|
RU2447544C1 |
| JP 2001210886 A, 03.08.2001. | |||

