Управление многосекционной машиной
Настоящее изобретение относится к многосекционной машине и, более конкретно, к управлению такой машиной.
Предшествующий уровень техники
Первая многосекционная машина была запатентована в патентах США №1843159 от 2 февраля 1932 г. и №1911119 от 23 мая 1933 г. Многосекционная машина имеет множество идентичных секций. Каждая секция имеет раму, на которой смонтирован ряд механизмов секции, включая механизмы открытия и закрытия формы со стороны заготовки и со стороны выдувания, механизм переворота и горлового кольца стеклоформующей машины, механизм отражательной плиты, механизм дутьевой головки, плунжерный механизм и механизм отставителя стеклоформующей машины. С этими механизмами связан технологический воздушный поток, используемый, например, для охлаждения. Каждый из этих механизмов секций и технологический воздушный поток должны приводиться в действие в выбранный момент времени в цикле секции.
Первоначально в многосекционной машине такие устройства, как, например, клапаны, которые приводили в действие механизмы, и технологический воздушный поток должны были механически включаться и выключаться в каждом цикле, и временные характеристики процесса контролировались с помощью 360-градусного времязадающего барабана, который представлял собой цилиндрический барабан, имеющий ряд кольцевых пазов, по одному для каждого клапана, каждый из которых служил опорой для упоров «включения» и «выключения» для размыкания соответствующего переключателя, связанного с конкретным клапаном. Поворот этого механического времязадающего барабана на 360° постоянно приравнивался к завершению одного цикла управления машины или секции, и соответственно специалисты в данной области техники всегда анализировали рабочие характеристики машины за один цикл оборота, т.е. за один из таких периодических циклов от 0° до 360°. Когда электронные средства синхронизации пришли на смену механическому времязадающему барабану, устройства стали включаться и выключаться с помощью электронного устройства задания последовательности (контроллера последовательности), которое воспроизводит цикл управления за один оборот 360-градусного механического времязадающего барабана. Угловое положение электронного контроллера последовательности определялось с помощью устройства кодирования, и электронные переключатели включались и выключались при тех же самых углах, что и в случае механического времязадающего барабана. Весьма значительной разработкой, которая существенным образом усовершенствовала производительность электронного контроллера последовательности, стала концепция термодинамических режимов (патент США №3877915), согласно которой группы таких электронных переключателей связывались таким образом, что они могли регулироваться одновременно. Эти контроллеры машин позволяют пользователю электронными средствами регулировать график включения/выключения (угол) для различных клапанов, которые управляют работой механизмов секции. Данный известный способ не позволяет оператору непосредственно вводить команды в машину для достижения желательных длительностей формования (например, время контакта при штамповке, время подогрева). Он также не исключает ситуаций некорректной установки пользователем последовательности срабатывания или даже установки таких последовательностей, которые могут привести к повреждениям из-за столкновений механизмов. Только при значительном опыте и глубоком знании процесса оператор может эффективным образом отрегулировать временной режим работы машины при использовании известного способа, а поскольку уровни знаний операторов различаются весьма значительно, то и производительность машины может существенным образом изменяться.
Задача изобретения
Задачей настоящего изобретения является создание усовершенствованной системы управления для стеклоформующей машины, которая упростит работу машины и облегчит настройку машины для достижения более высокой производительности.
Другие задачи и преимущества настоящего изобретения поясняются в последующем описании, иллюстрируемом чертежами, на которых представлен предпочтительный вариант осуществления настоящего изобретения.
Краткое описание чертежей
Фиг.1 - схематичное представление одной секции многосекционной машины, которая может иметь одну или более таких секций;
Фиг.2 - первая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.3 - вторая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.4 - третья часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.5 - четвертая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.6 - пятая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.7 - шестая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.8 - седьмая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.9 - восьмая часть сетевой диаграммы ограничений для процесса формования выдуванием;
Фиг.10 - сетевая модель для матрицы инцидентности с ветвлением;
Фиг.11 - диаграмма синхронизации событий для электронного контроллера последовательности цикла в 360°, который управляет секцией многосекционной машины;
Фиг.12А и 12В - сетевая диаграмма для использования в целях развертывания замкнутого цикла;
Фиг.13 - блок-схема, иллюстрирующая создание компьютеризованной модели математического представления сетевой диаграммы ограничений, полученной путем развертывания замкнутого цикла;
Фиг.14 - блок-схема, иллюстрирующая часть компьютеризованной модели, которая преобразует углы событий развернутого цикла в моменты времени событий разомкнутого цикла;
Фиг.15 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для анализа технологического маршрута (график)а развернутого цикла в отношении нарушений заданных ограничений таких, как последовательность, столкновение или нарушение длительности;
Фиг.16 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для анализа графика развернутого цикла для определения процессов термического формования;
Фиг.17 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для анализа графика развернутого цикла в целях оптимизации графика;
Фиг.18 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для определения углов событий для подходящего графика с использованием "N" входов длительности процесса термического формования;
Фиг.19 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для оптимизации графика развернутого цикла;
Фиг.20 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для выявления, если график определен как подходящий, любого действующего ограничения, которое ограничивает дальнейшее улучшение;
Фиг.21 - логическая блок-схема, иллюстрирующая операции управления с использованием компьютеризованной модели для минимизации износа смещаемых механизмов.
Краткое описание предпочтительного варианта осуществления
Многосекционная машина содержит множество (обычно 6, 8, 10 или 12) секций 10. Каждая секция имеет участок штамповки, включающий в себя механизм 12 открытия и закрытия формы, имеющий противоположные опоры 14 для закрепления половин штамповочной формы. Когда эти опоры формы сомкнуты с помощью соответствующего механизма 16 смещения, который может смещать опору формы между открытым (показано) и закрытым положениями и который смещается двигателем 18, таким как серводвигатель, дискретные капли расплавленной стекломассы могут доставляться в замкнутую черновую форму. Открытый верх черновой формы затем закрывается с помощью отражательной плиты опоры 22 отражательной плиты, которая имеет возможность смещения между убранным и выдвинутым положениями с помощью двигателя (такого как серводвигатель) 24. Если секция работает в режиме прессовыдувного формования, плунжер плунжерного механизма 26 выдвигается по вертикали вверх к капле стекломассы для формования пульки. Охлаждающий воздух подается к плунжеру посредством клапана V1. Если секция работает в режиме формования выдуванием, то венчик формуется путем подачи воздуха для выдувания для осаждения посредством клапана V2 в механизме 22 отражательной плиты, и пулька формуется с приложением противоположно выдуваемого воздуха к плунжеру посредством клапана V3, в то время как вакуум приложен к отражательной плите через клапан V4.
После формования пульки опора отражательной плиты перемещается назад, опоры формы убираются, и пара кронштейнов 30 держателя горлового кольца, закрепленных с возможностью поворота на механизме 31 переворота, поворачиваются на 180° приводом 32 сервомотора. Участок штамповки также включает в себя механизм 12 открытия и закрытия формы, имеющий противолежащие опоры 14 формы, которые служат опорой для половин формы для выдувания. Эти опоры формы смещаются между позициями открытия и закрытия с помощью подходящего механизма 16 смещения, который смещается мотором 18, таким как сервомотор. После того как пулька позиционирована на участке выдувания, опоры формы замыкаются, кронштейны горлового кольца размыкаются и освобождают пульку (каждый кронштейн смещается с помощью пневматического цилиндра (не показан), который приводится в действие соответствующим клапаном V5), механизм переворота возвращает кронштейны горлового кольца к стороне заготовки (кронштейны замыкаются перед их возвращением), и опора 34 дутьевой головки, которая имеет возможность смещения между убранным положением и выдвинутым положением, где установленная на опоре дутьевая головка закрывает черновую форму, смещается в выдвинутое положение с помощью соответствующего двигателя, такого как серводвигатель 36, для выдувания из пульки бутылки. Это завершающее выдувание контролируется клапаном V6.
После того как бутылка отформована, дутьевая головка втягивается, черновые формы открываются и механизм 38 отставителя стеклоформующей машины, приводимый в действие соответствующим двигателем 39, таким как серводвигатель, смещается для захвата отформованной бутылки и переноса ее в местоположение над приемным столом 40, где она охлаждается в подвешенном состоянии и затем размещается на приемном столе. Помимо перемещения механизмов и устройств, технологический поток воздуха, подаваемый к механизмам, подвижным или стационарным, также может регулироваться. Когда формы для выдувания смыкаются, включается воздушный поток, предназначенный для охлаждения формы, чтобы охладить отформованную бутылку.
Каждая секция управляется компьютером 42, который работает под управлением 360-градусного времязадающего барабана (программируемого контроллера последовательности), который определяет конечное число угловых приращений по окружности барабана, при которых механизмы и т.п. средства могут включаться и выключаться, в каждом повороте на 360 градусов. В процедуре управления, таким образом, известно время, требуемое для поворота на 360 градусов, и это время может фиксироваться или определяться как длительность между однократными на цикл импульсами, такими как импульсы с дозатора многосекционной машины. Каждый клапан циклируется (включается и выключается), и каждый механизм циклируется в пределах времени машинного цикла электронным времязадающим барабаном (программируемым контроллером последовательности), который является составной частью компьютера 42.
В соответствии с настоящим изобретением сначала определяется оснастка путем формирования диаграммы ограничений развернутого цикла для действительной конфигурации многосекционной машины и затем путем формирования математического представления диаграммы ограничений развернутого цикла, которое обеспечивает возможность его формулирования и реализации средствами автоматизации. Термин «развернутый» означает для индивидуальной секции такой цикл обработки, который начинается с формования капли расплавленной стекломассы путем отделения капли от дозатора стекломассы и заканчивается удалением отформованной бутылки с участка выдувания. Этот цикл обработки для своего завершения требует больше времени, чем один 360-градусный машинный цикл времязадающего барабана (обычно два 360-градусных машинных цикла).
На фиг.2-9 показана возможная сетевая диаграмма ограничений для репрезентативного процесса формования выдуванием при изготовлении стеклянных бутылок в многосекционной машине. Цикл начинается с вертикального реза, представленного временным узлом z1 (символами «z» и «n» обозначены временные узлы). Перемещение «Доставка капли/М13» (блок, содержащий символ «М», представляет действие, которое будет осуществлять перемещение между начальной и конечной позициями в направлении перемещения, обозначенном стрелкой) начинается в узле z1 и заканчивается в n177/е26/n6 (вертикально ориентированный знак равенства, обозначенный символом «е», соединяющий два узла, указывает на то, что два соединенных узла возникают в один и тот же момент времени). Перемещение, обозначенное как «Доставка капли/М13», подразделяется на два субперемещения, первое из которых «Капля в зоне столкновения с отражательной плитой/m2» (блок, содержащий символ «m», представляет субперемещение) начинается в z1/e1/n3 и заканчивается в узле n4, а второе - «Капля пересекает черновую форму/m3» - начинается в n4/е2/n5 и заканчивается в узле n6.
От узла z1 (вертикального реза) исходит также другая ветвь «Общая обработка/d13, которая начинается в z1/e79/n175 и заканчивается в n176/е78/n84 (фиг.9). Производные ветви диаграммы идентифицируются эллипсами, содержащими символ «D», и представляют длительности термообработки, которые определены как функция машинных событий.
На фиг.2 также показано, что перемещение «Плунжер в положение загрузки /МР1» (символ «Р» обозначает предыдущий цикл) должно быть завершено в узле n13. Узел n13 соответствует времени, когда перемещение «Плунжер в положение загрузки /M1» было завершено в узле n15 в течение предыдущего цикла. Это показано ветвью временного цикла (фиг.6), которая соединяет узлы n13 и n15. Плунжер включает в себя независимо перемещаемую мешалку для стекломассы, и в конце перемещения «Плунжер в положение загрузки/M1» как мешалка, так и плунжер подняты. Узел n133, являющийся концом перемещения «Доставка капли/М13», должен находиться спустя некоторое время (s2) (символ «s» сбоку от пары рядом расположенных стрелок, указывающих направление, представляет некоторое время (ограничение последовательности), которое должно пройти между соединенными узлами) после n13.
На фиг.2 также показан узел n20, который соответствует времени, когда перемещение «Отражательная плита отведена/МР15» было завершено в предыдущем цикле t2. Это показано ветвью t2 временного цикла, которая соединена с узлом n22 (фиг.4), что соответствует времени, когда перемещение «Отражательная плита отведена/МР15» завершается в последующем цикле. Узел n20 соединен с узлом n1, в котором начинается перемещение «Отражательная плита подведена/М14» спустя некоторое время (s22) после n20, т.е. перемещение «Отражательная плита подведена/М14» не может начаться, пока не будет завершено перемещение «Отражательная плита отведена/МР15». Перемещение «Отражательная плита подведена/М14» завершается в узле n93. Перемещение отражательной плиты разделяется на два субперемещения: «Отражательная плита перемещается до взаимовлияния с каплей стекломассы/m4», которое начинается в n1/е27/n7 и заканчивается в n8, и «Завершение подвода отражательной плиты/m5», которое начинается в n8/е3/n9 и заканчивается в n10/е28/n93. Также показана ветвь конфликтной ситуации «Отражательная плита сталкивается с каплей/с1» (ветви конфликтной ситуации представлены волнистой линией, обозначенной символом «с»), соединяющей узел n4 с узлом n8. Это означает, что капля стекломассы должна быть доставлена в узел n4 раньше или не позже, чем отражательная плита достигнет узла n8, чтобы гарантировать, что не произойдет столкновения.
На фиг.2 также показан узел n40, который соответствует времени перемещения «Черновые формы закрыты/МР9» последнего цикла (узел n40 соединен с узлом n55 (фиг.6), который является концом перемещения «Черновые формы закрыты/М9» текущего цикла, где t1 указывает на разницу циклов). Перемещение «Черновые формы закрыты/МР9» завершается в узле n40, что на некоторое время (s21) опережает начало перемещения «Капля пересекает заготовку/m3» в узле n5.
Когда капля полностью доставлена в черновые формы, что соответствует n177/е24/n26, начинается перемещение «Контакт с черновой формой /d1» (фиг.3), продолжающееся до n25/325/n28, когда начинается перемещение «Открытие черновых форм/М5». Перед началом перемещения «Контакт с черновой формой/d1», в момент n5/е63/n183 (момент, когда начинается перемещение «Капля пересекает черновую форму/m3») открывается вакуумный клапан, запуская ветвь обработки «Вакуумная поддержка/р13» (ветви обработки идентифицированы эллипсами, содержащими символ «Р»). Ветвь «Вакуумная поддержка/р13» продолжается до узла n182, когда вакуумный клапан должен запираться. Это означает, что в то же самое время, когда капля пересекает черновую форму, через горловое кольцо прикладывается вакуум (до завершения перемещения плунжера в положение загрузки), чтобы содействовать вытягиванию капли в горловую область черновой формы и в горловое кольцо.
В момент n12, который соответствует некоторому времени (s5), после того как капля доставлена (n177), и некоторому времени (s3), после того как отражательная плита подведена (n10), клапан сжатого воздуха открывается для инициирования перемещения «Установить выдув/p1», которое завершается в узле n11/e73/n21/e68/n155 запиранием клапана сжатого воздуха. Когда перемещение «Установить выдув/p1» завершается, начинается перемещение «Выпуск установленного выдува/p10», завершающееся в момент n19, и начинается перемещение «Контакт с горловым кольцом/d8», завершающееся в n154/е69/n113 перемещением «Открытие горловых колец/m21» (фиг.5). Это означает, что при завершении установки выдува капля стекломассы приводится в контакт с горловым кольцом, и нагрев снимается с капли до тех пор, пока горловые кольца не будут открыты. Перемещение «Отражательная плита вниз/М2» (фиг.2) начинается в узле n69, который соответствует некоторому времени (s1) после n11, и завершается в n35 (закрывает верх черновой формы для встречного выдува). В узле n172 (фиг.3), который соответствует некоторому времени s10 после n177, когда капля стекломассы полностью загружена в черновые формы, и некоторому другому времени s11 после завершения перемещения «Охлаждение черновой формы/рР7» в момент n173 в течение последнего цикла (t11), начинается перемещение «Охлаждение черновой формы/р7» с открытия клапана и продолжается до узла n171, когда клапан закрывается.
В момент n156 (фиг.3), который соответствует времени s40 после завершения перемещения «Вакуумная поддержка/р13» в узле n182 и который соответствует времени s7 после n19, когда завершено перемещение «Выпуск установленного выдува/p10», процесс «Плунжер смещается в положение встречного выдува/М3 (мешалка убрана из стекломассы) завершается в момент n70, и в то же время (n156/t70/n158) стекломасса в зоне венчика бутылки, находящаяся в полном контакте с формами, будет подогреваться (перемещение «Подогрев зоны венчика/с19») до n157/е71/n160, что соответствует некоторому моменту времени (s39) и некоторому времени (s36) после узла n35 (конец перемещения «Отражательная плита вниз/М2). В момент n160 начинается процесс «Встречный выдув/p11» с открытия клапана и продолжается до момента n159/е80/n181, когда открывается клапан, открывающий выпуск в отражательной плите, обеспечивая запуск процесса «Выпуск встречного выдува/р12». Этот процесс заканчивается в момент n180. В момент n148, который соответствует некоторому времени (s38) после n159, осуществляется процесс «Плунжер смещается в положение переворота/М4», в котором как мешалка, так и плунжер опущены (это происходит до момента n147).
В момент n149/е66/n151, соответствующий некоторому моменту времени (s37) после окончания процесса «Выпуск встречного выдува/р12» в момент n180, одновременно начинаются следующие события: 1) «Подогрев основания пульки/d7, которое продолжается до момента n150/е65/n28, и 2) «Отражательная плита отведена/М15 (фиг.4), которое продолжается до n22/е30/n33. Перемещение «Отражательная плита отведена/М15» может быть разделено на два субперемещения, первое из которых «Отвод отражательной плиты исключает взаимовлияние с переворотом/m11» начинается в момент n149/е29/n32 (фиг.3) и заканчивается в n31/е7/n34, а второе - «Завершение отвода отражательной плиты (после взаимодействия)/m12» - начинается в узле n34 и заканчивается в узле n33. В узле n28 (фиг.3), который соответствует некоторому времени (s8) после n149, одновременно возникают следующие события: 1) «Открытие черновой заготовки (черновые формы открываются)/М15, которое заканчивается в узле n27 (фиг.4), оставляя основание пульки на плате основания черновых форм; 2) «Подогрев (пульки)/d4» - начинается в момент n28/е15/n29 (фиг.4) и продолжается до момента n61/е16/n30 (Фиг.6) (некоторое время (s15) спустя после завершения перемещения «Подвод дутьевой головки/М18» в узле n101), когда начинается перемещение «Додувка/р2 (фиг.7), заканчивающееся в узле n63, и «Обратный подогрев/d3», который начинается в n28/е8/n38 (Фиг.3) и продолжается до n37/е9/n39 (фиг.5), что соответствует завершению перемещения «Переворот/М6», которое началось в узле n24. В узле n36 (фиг.5), спустя некоторое время (s4) после n37, подогрев будет продолжаться с перевернутой пулькой («Восстановление переворота пульки/р4») до узла n17. Перемещение переворота подразделяется на ряд субперемещений. В начале смещения переворота (n24/е53/n153) (фиг.4) имеется субперемещение «Взаимовлияние переворота с отражательной плитой/m40», которое заканчивается в момент n152/е67/n125. Следующее субперемещение представляет собой «Взаимовлияние отражательной плиты и переворота до взаимовлияния переворота и дутьевой головки/m32», которое заканчивается в момент n124/е52/n127. Следующее субперемещение представляет собой «Взаимовлияние 1 переворота на отставитель от взаимовлияния дутьевой головки/m3», которое заканчивается в n126/е60/n140, когда начинается перемещение «Взаимовлияние 2 переворота (движения) на отставитель/m33», заканчивающееся в n139/е61/n142. Следующее субперемещение представляет собой «Взаимовлияние 3 переворота на отставитель/m38», которое начинается в узле n142 и заканчивается в n141/е54/n129. Наконец, возникает перемещение «Завершение переворота/m35» (фиг.5), начинающееся в узле n129 и заканчивающееся в n128/е55/n39.
Выявлен ряд ветвей конфликтных ситуаций: «Плунжер сталкивается с переворотом/с2» (фиг.3), когда плунжер М4 не смещен в положение переворота, перед перемещением переворота (время n147 относительно времени n24); «Конфликт черновых форм с переворотом/с3» (фиг.4), когда черновые формы М5 не смещены в открытое положение перед перемещением переворота (время n27 относительно времени n24). Показан ряд других конфликтных ситуаций: конфликт отражательной плиты с переворотом - ветвь с4, когда отражательная плита m11 достигает выбранной точки перед n24, и отражательная плита вступает в конфликт с переворотом - ветвь с18, когда отражательная плита m11 достигает своего полностью отведенного положения перед n152, когда при перевороте достигаются внешние границы его зоны взаимовлияния с отражательной плитой. Путем подразделения зоны взаимовлияния на более чем одну зону может быть обеспечен более ранний запуск механизма. Дутьевая головка будет входить в конфликт с переворотом (ветвь с12), если перемещение «Дутьевая головка вверх МР19» не произошло (последний цикл t4), прежде чем при перевороте достигнут конец перемещения «Взаимовлияние переворота и отражательной плиты по отношению к взаимовлиянию переворота и дутьевой головки» (время n23 по отношению к времени n124).
Также показано перемещение отставителя - «Отставитель в зоне взаимовлияния 1/mр13» (фиг.4), которое заканчивается в момент n143 (последний цикл/t7), «Отставитель в зоне взаимовлияния 2/mр24», которое заканчивается в момент n144 (последний цикл/t8); и «Отставитель в зоне взаимовлияния 3/mр36» (фиг.5), которое заканчивается в момент n145 (последний цикл/t9). Выявлен ряд конфликтных ситуаций: «Конфликт отставителя с перемещением/с13» (фиг.4), если при перемещении достигается зона взаимовлияния 1 перед действием отставителя (узел n143 по отношению к узлу n126); «Конфликт отставителя с перемещением/с17», если при перемещении достигается зона взаимовлияния 2 перед действием отставителя (узел n144 по отношению к узлу n139); «Конфликт отставителя с перемещением/с16» (фиг.5), если при перемещении достигается зона взаимовлияния 3 перед действием отставителя (узел n141 по отношению к узлу n145). В узле n179 (фиг.4), который соответствует некоторому времени (s34) после узла n28, начинается перемещение «Охлаждение горлового кольца/р9» с открывания клапана и продолжается до узла n178, который соответствует некоторому времени s35 перед узлом n24, когда начинает осуществляться движение при перевороте/М6.
Черновые формы, которые были открыты - Мр24 (фиг.4) в момент n14 в течение последнего цикла t10, начинают закрываться в момент n98/е56/n146, который соответствует некоторому времени (s17) после n14. Закрытие реализуется посредством ряда перемещений: «Формы закрываются до ширины изделия/m39» (фиг.5), которое начинается в узле n146 и заканчивается в n109/е62/n85; «Формы закрываются до ширины пульки/m16», которое начинается в узле n85 и заканчивается в n62/е32/n42; «Формы закрываются до позиции приема/m14», которое начинается в узле n42 и заканчивается в n41/е10/n44; и «Формы закрывают крышку/m15», которое начинается в узле n44 и заканчивается в n43/е31/n97 (фиг.6). Перемещение «Отставитель удаляет изделие из формы/Мр30» (фиг.4) должно задействоваться в предыдущем цикле t3 до перемещения «Формы закрываются до ширины изделия/m39», чтобы избежать столкновения отставителя с формами - ветвь с10 (время n89 по отношению к времени n109). Кроме того, перемещение «Восстановление переворота пульки/р4» должно быть завершено, прежде чем формы закроются (время n17 по отношению к n62/е32/n42), в противном случае возникнет конфликтная ситуация - «Столкновение пульки с формой/с5».
Горловое кольцо размыкается для освобождения пульки у дутьевой головки (перемещение «Горловые кольца размыкаются/М8») (фиг.5). Это перемещение, которое происходит от n46 до n45/е44/n112, разделено на две части: «Задержка размыкания горлового кольца/m18», которое начинается в то же самое время n46/е45/n111 и заканчивается в n110/e43/n113 (спустя некоторое время (s26) после n41 - конец перемещения «Формы закрываются до позиции приема/m14», и за некоторое время (s25) до завершения перемещения «Черновые формы закрываются/М16» в узле n97) (фиг.6), когда начинается вторая часть («Открытие горловых колец/m21»). Эта вторая часть завершается в узле n112. В случае, когда перемещение «Горловые кольца замыкаются/М7» (фиг.6) реализуется (n49) перед перемещением «Взаимовлияние переворота на горловое кольцо/черновую форму/m19» (n51), будет возникать конфликтная ситуация - «Горловые кольца сталкиваются с черновой формой/с6». В узле n100 (фиг.5), который соответствует некоторому времени (s13) после отпирания горловых колец (М8) в узле n45, движение переворота осуществляется назад к его исходной позиции («Переворот/М17»). Переворот завершается в n99/t34/n53. Переворот включает в себя три субперемещения: 1) «Переворот исключает взаимовлияние с дутьевой головкой/m17», которое начинается в n100/е33/n48 и заканчивается в n47/е12/n52, 2)следующее за ним «Взаимовлияние переворота и горлового кольца/черновой формы/m19», которое заканчивается в n51/е13/n54, 3) следующее за ним «Завершение переворота/m20, заканчивающееся в n53/е34/n99. В момент n50, спустя некоторое время (s14) после n100, осуществляется перемещение «Замыкание горловых колец/М7», продолжающееся до n49. Если горловые кольца не замкнутся до момента, когда переворот достигает своего исходного положения взаимовлияния с черновой формой (время n49 по отношению к времени n51), то возникает конфликтная ситуация - «Горловые кольца сталкиваются с черновой формой/с6».
В момент времени n102 (фиг.5), соответствующий некоторому времени (s23) после n23, осуществляется перемещение «Подвод дутьевой головки/М18» (фиг.6), заканчивающееся в n101/е36/n59. Это двухэтапное смещение, начинающееся с перемещения «Взаимовлияние дутьевой головки на переворот/m2, которое начинается в n102/е35/n58 и заканчивается в n57. В случае, когда событие «Переворот устраняет взаимовлияние с дутьевой головкой» не происходит перед событием «Взаимовлияние дутьевой головки на переворот», возникает состояние «Переворот приводит к столкновению с дутьевой головкой/с8» (узел n57 по отношению к узлу n47). Последняя часть смещения дутьевой головки представляет собой «Завершение подвода дутьевой головки/m23», которое начинается в n57/е14/n60 и заканчивается в n59.
В узле n56 начинается перемещение «Заготовки закрываются/М9», которое продолжается до n55. Если завершение перемещения «Переворот/М17» в узле n99 не предшествует началу перемещения «Заготовки закрываются/М9» в узле n56, то возникнет конфликтная ситуация «Переворот приводит к столкновению с черновыми формами/с7». В узле n16, спустя некоторое время (s6) после узла n99, осуществляется перемещение «Плунжер в позицию загрузки/M1», завершающееся в узле n15.
Узел n30/е17/n66 (фиг.7) есть начало перемещения «Контакт с формой/d8» (фиг.8), которое завершается в n65/е18/n68, и перемещения «Додувка/р2», которое завершается в узле n63. Узел n30/311/n165 также является концом перемещения «Предварение вакуумного дутья/d12», которое начинается в узле n166/е77/n168. В узле n168 также начинается перемещение «Вакуумное дутье/р5», которое заканчивается в узле n167, что соответствует некоторому времени (s29) перед узлом n68/е18/n65 (фиг.8), являющимся концом перемещения «Контакт с формой/d5). Оба перемещения «Предварение вакуумного дутья/d12» и «Вакуумное дутье/р5» начинаются в узле n168/е77/n166 (фиг.6), что соответствует некоторому времени (s9) после n97. В узле n91, которое соответствует некоторому времени (s27) после конца перемещения «Закрытие формы для выдувания/М16» в узле n97, начинается перемещение «Охлаждение формы для выдувания/р3» (фиг.8), продолжающееся до узла n90, что соответствует некоторому времени (s30) перед концом (n65/318/n68) перемещения «Контакт с формой/d5». Кроме того, перемещение «Предварительное охлаждение формы для выдувания/d11» (фиг.6) начинается в то же самое время n91/е74/n162 и продолжается до n161/e75/n30/e16/n61, что также является концом перемещения «Переворот/d4». Перемещение «Заключительное охлаждение/р6» (фиг.7) начинается в узле n170, который соответствует некоторому времени (s31) после конца перемещения «Подвод дутьевой головки/М18» в узле n101, и заканчивается в узле n169.
В узле n104 (фиг.7), соответствующем некоторому времени (s32) после конца «Заключительного охлаждения/р6» в узле n169, начинается перемещение «Поднятие дутьевой головки/М19», завершающееся в n103/е38/n73. Это перемещение может быть разделено на ряд субперемещений: 1) «Поднятие дутьевой головки до конца додувки/m41», начинающееся в n104/е76/n164 и заканчивающееся в n163, что соответствует некоторому времени (s20) перед n63 (конец «Додувки/р2»); «Дутьевая головка устраняет взаимовлияние 1 с отставителем/m25», что начинается в n163/е37/n72 и заканчивается в n71; 3) «Поднятие дутьевой головки устраняет взаимовлияние 2 с отставителем/m7», что начинается в n71/е21/n95 и заканчивается в n92; 4) «Поднятие дутьевой головки устраняет взаимовлияние 3 с отставителем/m8», что начинается в n92/е5/n96 и заканчивается в n94 (фиг.8); 5) «Завершение поднятия дутьевой головки/m26», начинающееся в n94/е6/n74 и заканчивающееся в n73.
Перемещение «Захваты размыкаются/М312 (фиг.6) завершается в момент n86 (предыдущего цикла t5), и спустя некоторое время (s28) после этого в узле n119 начинается «Отбрасывание назад (позиция готовности отставителя)/М22» и заканчивается в n118. В момент n106, который соответствует некоторому времени (s24) после n118, начинается перемещение «Ввод отставителя/М20», заканчивающееся в момент n105. Перемещение отставителя включает в себя ряд субперемещений: 1) «Ввод отставителя до взаимовлияния 1 с дутьевой головкой/m27», начинающееся в n106/е39/n76 и заканчивающееся в n75; 2) «Ввод отставителя до взаимовлияния2 с дутьевой головкой/m9», начинающееся в n75/е22/n117 и заканчивающееся в n116; 3) «Ввод отставителя до взаимовлияния 3 с дутьевой головкой/m10», начинающееся в n116/е19/n132 и заканчивающееся в n131; 4) «Завершение ввода отставителя/m28», начинающееся в n131/е20/n78 и заканчивающееся в n77/е40/n105 (фиг.8). Выявлен ряд конфликтных ситуаций: 1) «Дутьевая головка сталкивается с отставителем/с9», что будет происходить, если n75 опережает по времени n71; 2) «Дутьевая головка сталкивается с отставителем/с14», что будет происходить, если n116 опережает по времени n92; 3) «Дутьевая головка сталкивается с отставителем/с15» (фиг.8), что будет происходить, если n131 опережает по времени n94. В момент n80, который соответствует некоторому времени (s18) после n105 (конец «Ввода отставителя/М20»), перемещение «Захваты открываются/М11» заканчивается в n79/е51/n120. В момент n68 начинается перемещение «Черновые формы открываются/М10», заканчивающееся в n67/е50/n122. Это перемещение включает в себя ряд субперемещений: 1) «Формы открываются до точки освобождения/m29», начинающееся в n68/е49/n121 и заканчивающееся в n120/е4/n64; 2) «Формы открываются до освобождения изделия/m6», начинающееся в n64 и заканчивающееся в n130/e48/n123; 3) «Завершение открытия форм/m31», начинающееся в n123 и заканчивающееся в n122/е50/n67. В момент n108, спустя некоторое время (s19) после n79, в конце перемещения «Зажимы замыкаются/М11» осуществляется перемещение «Отвод отставителя/М21», завершающееся в n107 (фиг.9). Это перемещение также включает в себя ряд субперемещений: 1) «Отвод отставителя через зону взаимовлияния 1/m13», начинающееся в n108/е41/n138 и заканчивающееся в n133; 2) «Отставитель освобождает изделие из формы/m30» (фиг.9), начинающееся в n133/е57/n82 и заканчивающееся в n81; 3) «Отвод отставителя через зону взаимовлияния 2/n24», начинающееся в n81/е23/n135 и заканчивающееся в n13; 4) «Отвод отставителя через зону взаимовлияния 3/m36», начинающееся в n13/е58/n137 и заканчивающееся в n136; 5) «Завершение отвода отставителя/m37», начинающееся в n136/е59/n88 и заканчивающееся в n87/е42/n107. Конфликтная ситуация «Формы сталкиваются с отставителем/c11» будет возникать, если n82 опережает n130.
Наконец, в конце перемещения «Отвод отставителя/М21 (n107/е46/n115) осуществляется перемещение «Охлаждение подвесного приемного стола/d6», продолжающееся до n114. В момент n174, спустя некоторое время (s12) после n107 осуществляется перемещение «Приемный стол в верхнем положении/р8», продолжающееся до n18. Спустя некоторое время (s33) после этого, в n84/е78/n176/е47/n114 заканчивается «Полный процесс/d13», заканчивается «Охлаждение подвесного приемного стола/d6» и в n83 заканчивается перемещение «Зажимы открываются/М12».
Хотя в целях иллюстрации выше описана одна конкретная конфигурация машины для формования выдуванием, следует иметь в виду, что имеется ряд конфигураций, которые применяются пользователями машин, в том числе формование выдуванием и прессовыдувное формование, причем для каждого пользователя разрабатываются различные конкретные процессы, которые могут в некоторой степени отличаться друг от друга. Специалист в данной области техники на основе проиллюстрированной конфигурации может определить диаграмму ограничений для своей реальной конфигурации.
Следующим этапом является преобразование данной сетевой диаграммы ограничений в представление, которое является идеальным для автоматизированного формулирования и решения задач графического синтеза и анализа с помощью компьютера. В предпочтительном варианте осуществления изобретения использовано матричное алгебраическое представление сетевой модели ограничений, однако могут использоваться и другие формы математических представлений. Матрица F инцидентности с ветвлением может быть сформирована следующим образом:
1. Пронумеровать ветви в сетевой диаграмме ограничений (СДО) от 1 до Mb, где Mb - общее количество ветвей в сети. Порядок присвоения номеров ветвей произволен.
2. Пронумеровать узлы в СДО от 1 до Nn, где Nn - общее количество сетевых узлов. Порядок присвоения номеров узлов произволен.
3. Сформировать первую строку матрицы F, состоящей из Mb строк и Nn столбцов, путем ввода значения 1 (положительной единицы) в столбец, соответствующий узлу-источнику для первой ветви, и значения -1 (отрицательной единицы) в столбец, соответствующий узлу-адресату для первой ветви, и нулей для всех других столбцов.
4. Сформировать строки с второй по Mb-ю матрицы F путем повторения процедуры, описанной на этапе (3), для второй, третьей и т.д. вплоть до Mb ветви в сети.
В результате будет получена матрица F, состоящая из Mb строк и Nn столбцов, которая почти полностью заполнена нулями, за исключением одной записи «1» и одной записи «-1» в каждой строке.
В качестве конкретного примера на фиг.10 показана СДО для простой сетевой модели. Сеть имеет Mb=7 ветвей и Nn=6 узлов. Матрица F инцидентности с ветвлением для данной сети будет, таким образом, иметь 7 строк и 6 столбцов. Для этой модели, использующей номера ветвей и узлов, показанные на фиг.3, матрица F будет иметь вид:
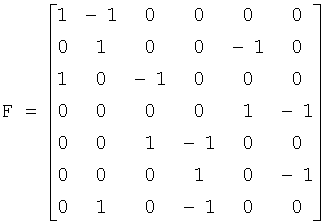 (1)
(1)
Каждая ветвь i в сетевой модели ограничений представляет пару соотношений в следующей форме:


где tадресата,i - время, соответствующее узлу адресата i-ой ветви;
tисточника,i - время, соответствующее узлу источника i-ой ветви;
δmax,i - максимально допустимая продолжительность ветви для i-ой ветви;
δmin,i - минимально допустимая продолжительность ветви для i-ой ветви.
Определим вектор t узловых времен, где j-ый элемент t есть время, соответствующее j-ому сетевому узлу. Обозначая i-ю строку матрицы F инцидентности с ветвлением через Fi, уравнения (2) и (3) можно переписать в виде:


Этот результат вытекает из того факта, что матричное перемножение i-ой строки Fi матрицы ограничений на вектор t узлового времени осуществляет выбор только времен, соответствующих узлу источника и узлу адресата, поскольку все другие записи в строке равны нулю. В соответствии с общепринятой практикой значение положительной единицы присваивается элементу, соответствующему узлу источника, а значение отрицательной единицы присваивается узлу адресата.
Поскольку уравнение (3) и уравнение (4) справедливы для каждой ветви в сети, то фундаментальные уравнения матрицы ограничений могут быть записаны в следующей форме:


Для ветвей, которые не имеют верхнего предела по своей продолжительности, значение δmin,i устанавливается на «минус бесконечность». Для ветвей, которые должны быть точно согласованы с целевым значением, как верхний предел, так и нижний предел устанавливаются равными целевому значению δцелевое,i.
Фундаментальные уравнения матрицы ограничений (уравнения (6) и (7)) преобразуются с учетом трех типов дополнительных ограничений. Эти три типа ограничений следующие:
1. Продолжительность ветви для всех ветвей циклов должна быть одинаковой. Это требуется для реализации регулярного циклового периода в системе в целом.
2. Продолжительность ветви для каждого субперемещения должна оставаться постоянной долей продолжительности ветви по отношению к ее соответствующей основной ветки перемещения.
3. Абсолютное время события для одного узла сети должно быть установлено на желательное опорное значение (в типовом случае равное нулю).
Эти требования могут быть выражены в терминах ранее определенной матрицы F инцидентности с ветвлением в следующем виде:
Каждая ветвь цикла должна иметь продолжительность, равную периоду Т цикла, и поэтому независимо от конкретного значения периода цикла все Nt ветвей цикла должны иметь одну и ту же продолжительность ветви. Обозначим номера ветвей, соответствующие ветвям цикла множеством {i1, i2,...iNt}. Тогда продолжительность k-ой ветви цикла может быть выражена следующим образом:

где  представляет строку ik матрицы F инцидентности с ветвлением.
представляет строку ik матрицы F инцидентности с ветвлением.
Регулярное ограничение длительности ветви тогда обеспечивается путем установки каждой из продолжительностей ветвей цикла равной длительности первой ветви цикла следующим образом:
Что может быть переупорядочено для получения следующего соотношения:
Определим матрицу At, представляющую левую часть уравнения (10), таким образом, что
Уравнение (10) может быть записано в более компактной форме как

Если продолжительность ветви для ветви основного перемещения изменяется, то ветви субперемещений (если они имеются), связанные с данной ветвью, должны быть пропорциональным образом масштабированы.
Для представления данного множества вспомогательных ограничений сначала необходимо определить некоторую запись. Обозначим номера ветвей, соответствующие ветвям основного перемещения (включая только ветви, которые связаны с ветвями субперемещений), множеством {M1, М2,...,MNm}, где Nm - общее количество ветвей основных перемещений, которые имеют связанные с ними ветви субперемещений. Обозначим ветви субперемещений, связанные с k-ой ветвью основного перемещения, множеством {mk1, mk2,...,mkNk}, где Nk - общее количество ветвей субперемещений, связанных с k-ым основным перемещением. Каждая длительность ветви субперемещения представляет фиксированную долю продолжительности связанной с ней основной ветви. Обозначим через αkj эту фиксированную долю для j-ой ветви субперемещения, связанной с k-ой ветвью основного перемещения.
Требуемое множество ограничений, связанных с k-ой ветвью основного перемещения, можно теперь представить с помощью следующего уравнения:
Определяя матрицу AMk для представления левой части уравнения (13) в следующем виде:
можно переписать уравнение (13) более компактно в следующем виде:

Далее, определяя матрицу Am как
полное множество дополнительных ограничений субперемещений можно выразить посредством следующего уравнения:

В сети выбирается один опорный узел, и абсолютное время, соответствующее возникновению этого события, устанавливается в нуль. Обозначая номер опорного узла как k, данное ограничение можно выразить следующим образом:

где k-ый элемент вектора-строки Az имеет значение 1, а все другие его элементы равны нулю.
Наконец, определяется расширенная матрица А ограничений в следующем виде:

где Fr - сокращенная матрица инцидентности с ветвлением, образованная путем исключения всех избыточных теперь строк в F. Более конкретно, строки, соответствующие всем ветвям субперемещений, и все ветви, кроме первой ветви цикла, исключаются из F для формирования Fr. Длина Nb+Nt+NM+1 векторов bmin и bmax определяется следующим образом:
Полное множество сетевых ограничений может затем быть выражено путем комбинирования уравнений (6), (7), (12), (17), (20) и (21) в единую расширенную систему уравнений ограничений:


В правой части уравнения (22) и уравнения (23) конечные Nt+NM+1 элементов векторов bmax и bmin соответственно всегда равны нулю. Целью является отыскание множества моментов времени событий (графика), которое удовлетворяет всем требуемым сетевым ограничениям. В принципе, будет иметься более одного, а в действительности, бесконечное множество таких графиков, которые подходят под сетевые ограничения. Поэтому используется методология, основанная на ограниченной оптимизации, для выбора наиболее подходящего графика из множества доступных возможных вариантов. Обобщенный метод может быть оптимизирован для удовлетворения различных практических проблем путем осуществления целесообразного выбора критерия оптимизации. Некоторые неформально установленные критерии оптимизации, которые представляют практический интерес, включают следующее:
1. Минимизация периода цикла с определенными продолжительностями термического процесса
2. Максимизация продолжительностей конкретного термического процесса, например, подогрева, на длительности фиксированного периода цикла.
3. Минимизация истирания и задира за счет замедления механизмов в максимально возможной степени при фиксированном периоде цикла и определенном множестве продолжительностей термического процесса.
Оптимальные графики, использующие эти критерии, легко получить с использованием новой методологии, которая была разработана.
В терминах представления матричной алгебраической модели, описанной выше, общая задача, которую необходимо решить, состоит в нахождении вектора t длиной Nn узловых времен, который удовлетворяет следующему условию:

при удовлетворении следующих ограничений:
At≤bmax
At≥bmin
Скалярная функция f, называемая здесь целевой функцией, определяет критерий для различения наиболее желательного из множества возможных решений задачи. Это решение известно как Задача ограниченной оптимизации (в противоположность Задаче неограниченной оптимизации), потому что нам необходимо найти оптимальное решение, но при ограничении множества возможных решений теми, которые удовлетворяют определенному множеству ограничений. В этом случае ограничения выражаются как множество линейных неравенств.
Широкое разнообразие практических критериев может быть выражено в терминах квадратичной целевой функции формы. В действительности, постоянный член f0 не строго необходим, поскольку он не влияет на местоположение минимумов и максимумов в системе. Он сохранен здесь только потому, что далее позволит дать значению целевой функции более очевидную интерпретацию, как мера различия действительных продолжительностей ветвей от желательных целевых значений.

Как будет показано более подробно ниже, по существу задачи построения графиков для машины в действительности могут быть выражены с использованием квадратичной целевой функции формы, определенной уравнением (25).
Задача оптимизации, которая характеризуется комбинацией квадратичной целевой функции и линейных ограничений, известна как задача квадратичного программирования. Множество различных быстродействующих и надежных численных алгоритмов существует для решения задачи квадратичного программирования. В некоторых практических случаях (например, минимизации периода цикла) критерии оптимизации могут быть выражены с использованием линейной целевой функции формы, определяемой следующим соотношением:

Эта комбинация линейной целевой функции с линейными ограничениями известна как задача линейного программирования. Задачи линейного программирования во многих случаях могут быть решены с меньшими вычислительными затратами и поэтому даже с более высоким быстродействием, чем задачи квадратичного программирования, но решающая функция квадратичного программирования, используемая для сохранения линейных и квадратичных целевых функций, является наиболее экономичным решением.
Основная идея Общей методологии синтеза целевого графика (ОМСЦГ) состоит в присвоении целевого значения продолжительности каждой ветви в сети. Эти целевые значения представляют идеальное множество значений, которые пользователю было бы желательно получить для всех продолжительностей ветвей. Ввиду множества сетевых ограничений, которые должны быть удовлетворены, в действительности может оказаться невозможным получить все целевые значения продолжительности ветвей. Поэтому ОМСЦГ отыскивает график, который согласует целевые значения с максимально возможной точностью.
ОМСЦГ реализует свои возможности в обеспечении единого подхода к множеству задач за счет использования четырех главных принципов:
1. Квадратичная целевая функция - квадратичная целевая функция обеспечивает математически точную запись графика, причем степень близости с целевым значением является максимально возможной.
2. Жесткие пределы - жесткие верхний и нижний пределы могут быть установлены для допустимых продолжительностей для каждой ветви сети.
3. Блокирование - продолжительности конкретных ветвей могут блокироваться (фиксироваться), так что они реализуются с высокой точностью в итоговом графике.
4. Решающая функция квадратичного программирования (КП) - использование надежной численной решающей функции квадратичного программирования.
Каждый из вышеописанных принципов описан ниже более детально.
Интуитивная запись графика, являющегося близким к целевому значению, должна быть выполнена математически точной, чтобы реализовать автоматическое численное решение. Для этой цели определим целевую функцию f(t) в следующем виде:

где wi - постоянная, которая взвешивает важность отклонения между целевой и действительной продолжительностью для i-ой сетевой ветви;
δi(t) - продолжительность i-ой сетевой ветви как функция t, вектор длиной Nn моментов времени узловых событий (график);
δt - продолжительность ветви для i-ой сетевой ветви;
Nb - общее число сетевых ветвей.
Таким образом степень сходства с целевым значением записывается как взвешенная сумма квадратичных отклонений между целевой и действительной продолжительностями ветвей. Следует отметить, что для двумерного или трехмерного случая (Nb=2 или Nb=3) и wi=1 уравнение (27) выражает известную формулу для евклидова расстояния.
Отметим, что продолжительность ветви для продолжительности i-ой ветви может быть выражена в терминах i-ой строки матрицы инцидентности с ветвлением в следующем виде:
δi=-Fit,
Уравнение (27) может быть выражено в терминах ранее определенной матричной алгебраической модели системы в следующем виде:

где W - весовая матрица,
δ - вектор целевых длительностей ветвей,
F - матрица инцидентности с ветвлением,
Т - вектор длины Nn моментов времени узловых событий (график),
Верхний индекс Т обозначает транспонирование матрицы.
Следуя процедуре алгебраического преобразования, уравнение (28) можно переписать в следующем виде:

Уравнение (29) можно затем выразить в стандартной форме при условии использования уравнения (25) для квадратичной целевой функции:

где
Н=2FTWTWF
C=2δtWTWF
f0=δt TWTWδt
Некоторая гибкость допускается в определении элементов диагональной матрицы весов. Простейшим вариантом является установление каждого из весов wi ветвей на значение, равное 1, так что матрица W становится единичной матрицей. Это дает равный вес абсолютной ошибке (отклонению) между желательным и целевым значением продолжительности для всех сетевых ветвей. Хотя в некоторых случаях метод абсолютной ошибки может быть приемлемым, в более общем случае учитывается относительная ошибка, причем в этом методе ошибка для каждой ветви нормируется ее типовой продолжительностью. Таким образом, при использовании метода относительной ошибки отклонение величиной 1 мс для ветви, типовая продолжительность которой равна 10 миллисекунд, рассматривается как имеющее ту же важность, что и отклонение величиной в 1 секунду для ветви, типовая продолжительность которой равна 10 секунд. Для метода относительной ошибки определим матрицу W весов следующим образом:

где δhigh1 - крупномасштабное значение для i-ой сетевой ветви,
δlow1 - мелкомасштабное значение для i- ой сетевой ветви.
Часто бывает полезным иметь возможность ограничить допустимые диапазоны конкретных продолжительностей ветвей. Примерами ситуаций, требующих этой возможности, могут служить механизмы, которые имеют нижнюю границу продолжительности своего перемещения, и этапы способа, которые имеют нижнюю и/или верхнюю границы своей продолжительности. Эти границы устанавливаются в ОМСЦГ путем присвоения соответствующих значений элементам в векторах bmin и bmax, образующих правые части матричных соотношений для ограничений, заданных уравнением (24).
В некоторых случаях желательно определить, что конкретные продолжительности ветвей должны быть точно равны целевым значениям. Это будет называться фиксацией (блокировкой) целевого значения. Например, в некоторых случаях необходимо фиксировать продолжительность ветвей цикла, потому что период цикла аппаратуры, находящейся выше по потоку обработки, например дозатора, невозможно отрегулировать простым способом. Эта возможность реализуется в ОМСЦГ путем установки значения соответствующих элементов верхней и нижней границ (векторов bmin и bmax, образующих правые части матричных соотношений для ограничений, заданных уравнением (24)) как равных целевому значению. Матрица Н должна быть положительно определенной. Во избежание усложнений с этой численной задачей малые веса могут быть присвоены даже тем ветвям, продолжительности которых не представляют интереса, или может быть использована решающая функция, которая специальным образом осуществляет обработку случая, когда Н является только положительно полуопределенной.
На основе либо предшествующего опыта, либо конкретных испытаний желательные продолжительности всех этапов термической обработки (подогрев, додувка и т.д.) могут быть известны и для изготовителя бутылок может оказаться нежелательным изменение этих значений. Если продолжительность ветви периода цикла не фиксирована, продолжительности ветвей, относящихся к термической обработке, фиксированы, и продолжительности ветвей перемещений механизмов фиксированы на значении, соответствующем длительностям наиболее скоростных возможных перемещений механизмов, то целевая продолжительность для периода цикла может быть установлена на нуль (указывая, что желательным является установка ее на минимально возможное значение). Решающая функция квадратичного программирования позволит тогда найти график с самым коротким возможным периодом цикла, совместимым со всеми сетевыми ограничениями. Эти ограничения включают фиксированные длительности термических процессов и длительности перемещений механизмов совместно с требованиями предотвращения столкновений, выдерживания надлежащей последовательности и т.д.).
Также является возможным, что конкретный график может обеспечить достижение требуемого периода цикла и желательного множества длительностей процессов термообработки, но при этом может потребовать перемещения некоторых механизмов быстрее, чем это строго необходимо для достижения указанных целей. Может оказаться желательным только управление механизмами лишь с такой скоростью, которая абсолютно необходима для достижения других желательных целей. Это позволило бы снизить средний и пиковый ток в серводвигателях (и уменьшить связанный с этим нагрев электродвигателей) и, возможно, с другой стороны, уменьшить истирание и задиры в системе. Для этого период цикла и другие длительности ветвей термообработки должны фиксироваться на их желательных значениях. Все продолжительности ветвей перемещений будут не фиксированными, а их целевые значения будут установлены на относительно большое значение. Решающая функция квадратичного программирования будет тогда иметь свободу в ускорении работы механизмов, если это необходимо для удовлетворения ограничений для периода цикла и длительностей термообработки, а в противном случае это привело бы к увеличению длительности перемещений в максимально возможной степени.
Если желательные целевые значения не могут быть точно достигнуты, пользователю может быть дана соответствующая индикация того, какие пределы должны быть снижены, чтобы более точно достичь поставленной цели. Это может быть сделано путем анализа значений множителей Лагранжа, вычисленных в точках оптимального графика. Множители Лагранжа можно интерпретировать как частные производные целевой функции, взятые по элементам векторов bmin и bmax, образующих правые части матричных соотношений для ограничений, заданных уравнением (24). Таким образом, ненулевые значения для конкретных множителей Лагранжа указывают на то, что целевая функция будет либо возрастающей, либо убывающей (в зависимости от алгебраического знака множителя Лагранжа) соответственно смене знака соответствующего элемента векторов bmin и bmax. Такие ограничения называют активными. Другие ограничения, для которых множители Лагранжа равны нулю, называют неактивными. Путем соответствующего отображения для пользователя активных ограничений, ранжированных по относительной величине их значений множителей Лагранжа, пользователь будет информирован относительно того, какие границы накладывают наибольшие ограничения на достижение требуемого результата. Кроме того, знак множителя Лагранжа может быть использован для определения и затем для отображения пользователю, следует ли увеличить или уменьшить целевое значение (в случае блокированной ветви), чтобы дополнительно улучшить возможности достижения целевых значений для неблокированных ветвей. Большинство алгоритмов оптимизации с ограничениями обеспечивают возможности вычисления значений множителей Лагранжа (или их вычисления в качестве составной части обычных операций), так что эта дополнительная информация может быть использована для предоставления пользователю при необходимости дополнительных руководящих указаний.
Если пользователь чрезмерно ограничивает систему, то может оказаться, что отсутствует целесообразное решение задачи квадратичного программирования, которая была поставлена. В таком случае важно распознать, что задача неразрешима, и смягчить граничные значения в достаточной степени, чтобы возникла возможность получения допустимого решения. Решающие функции квадратичного программирования в типовом случае способны распознать случаи отсутствия допустимого решения и установления соответствующего флага. Этот флаг может быть использован программным обеспечением, которое реализует ОМСЦГ, чтобы выдать подсказку пользователю уменьшить какие-либо из ограничений в максимально возможной степени.
Матричное алгебраическое представление (МАП) также позволяет проанализировать предлагаемый график, чтобы выявить потенциальные повреждения или нежелательные нарушения ограничений. Эта возможность обеспечивает механизм для выполнения интеллектуальной оценки ввода по запросу изменений пользователем моментов времени событий, что выходит далеко за пределы обычной проверки верхней и нижней границы.
Основной целью методологии анализа графика является обеспечение возможности проверки предлагаемого графика на предмет нарушения ограничений и затем для уведомления о любых нарушениях, которые могут быть обнаружены. Данный метод также позволяет уведомлять о нарушениях таким путем, чтобы позволить пользователю понять последствия нарушения и, насколько это возможно, указать на средство предотвращения таких нарушений.
Реальная проверка нарушений ограничений в вычислительном смысле достаточно проста, использует только матричное умножение и вычитание. Для получения в целом требуемых функциональных возможностей, имеются еще ряд дополнительных факторов, которые также должны приниматься во внимание. Дополнительная сложность возникает, в первую очередь, из-за того факта, что можно планировать моменты времени для сетевых событий только для подмножества узлов в полной модели системы. Это подмножество узлов называют группой независимых узлов. Моменты времени для остальных, зависимых узлов затем автоматически вычисляются из моментов времени для независимых узлов и известных фиксированных продолжительностей ветвей.
Общая методология в этом случае состоит из следующих компонентов:
1. Решение для моментов времени, соответствующих зависимым узлам.
2. Обнаружение нарушений ограничений.
3. Диагностика и категоризация нарушений.
Моменты времени, соответствующие зависимым узлам, могут быть разрешены в терминах ранее определенного множества ограничений с использованием следующей процедуры.
1. Сформировать подмножество ограничений равенства в следующем виде:

путем сохранения только тех строк в А и b (как определено уравнениями (19) и (20) соответственно), для которых верхняя и нижняя границы равны. Заметим, что верхняя и нижняя границы для ветвей с известными фиксированными продолжительностями обе будут устанавливаться на это известное фиксированное значение. Верхняя и нижняя границы этих ветвей с фиксированными продолжительностями поэтому будут равны и строки матрицы А, соответствующие этим ветвям, вместе с дополнительными ограничениями будут поэтому сохраняться в Aeq. В типовом случае ветви с известными фиксированными значениями будут соответствовать ветвям перемещений, цикличности и одновременности. Для того чтобы иметь хорошо сформулированную задачу, размерность строки Aeq должна быть больше или равна количеству независимых моментов времени узлов. Требуется, чтобы достаточному количеству ветвей были присвоены фиксированные значения, чтобы это условие выполнялось.
2. Путем переупорядочения столбцов матрицы Aeq сформировать разделенную на блоки матрицу Ар инцидентности, в которой первые N1 столбцов матицы Ар соответствуют независимым моментам времени узлов. Сформировать разделенный вектор tp моментов времени узлов путем сортировки столбцов вектора t так, чтобы соответствовать новому порядку столбцов в матрице Fp. Затем уравнение (32) может быть записано в следующем виде:
3. Переупорядочить уравнение (33) для формирования системы линейных уравнений:

4. Присвоить текущие значения независимым моментам времени узлов и элементам beq, соответствующим фиксированным продолжительностям ветвей, и решить переопределенную систему уравнений (34) для tpD. Это может быть сделано с использованием стандартных численных методов, доступных для решения переопределенных систем линейных уравнений, например, линейной решающей функции наименьших квадратов. Для непротиворечивого множества фиксированных продолжительностей ветвей и надлежащим образом построенной сетевой диаграммы ограничений может быть получено точное решение этой переопределенной задачи. Т.е. без какой-либо ошибки может быть найден вектор зависимых моментов времени tpD узлов, который удовлетворяет уравнению (34). Если точное решение не может быть найдено, то пользователь должен быть уведомлен соответствующим образом, чтобы можно быть поправить ситуацию. Следует заметить, что должен быть включен нулевой опорный узел с независимыми моментами времени и совместимый с определением, обеспечиваемым уравнением (18).
6. Элементы векторов tpD и tp1 повторно пересортировываются в их исходный порядок соответственно строкам уравнений (22) и (23) для формирования вектора tproposed моментов времени, образующего предлагаемый график.
После того как зависимые моменты времени вычислены и предлагаемый график стал доступным, действительное обнаружение нарушений ограничений является относительно простым. Пусть предлагаемый график задан вектором tproposed моментов времени узлов. Из уравнения (22) и уравнения (24) проверяемые условия задаются системой неравенств:


Если неравенства, заданные соотношениями (35) и (36), не полностью удовлетворяются, то предлагаемый график нарушает по меньшей мере одно ограничение.
Каждая строка в неравенствах (35) и (36) представляет конкретное системное ограничение. Пояснительный текст и уровень значимости могут соответственно быть поставлены в соответствие с каждой строкой в этих соотношениях. Предлагаемый график тогда должен проверяться путем оценки соотношений (35) и (36). Номера любых строк, которые не удовлетворяют требуемым неравенствам, в данном случае дадут показатель для вызова и отображения соответствующего текста сообщения об ошибке. Уровень значимости может быть использован для сортировки множества нарушений ограничений в порядке их значимости и может также использоваться для вызова соответствующего кода цвета или иного атрибута (мерцание) на графическом пользовательском интерфейсе.
Это установление соответствующего текста и уровня значимости может осуществляться автоматическим способом. Для пояснения того, как может быть выполнено такое автоматическое назначение, напомним, что строки в соотношениях (35) и (36) получают из сетевых ветвей. Нарушение, соответствующее каждому типу ветви, может поэтому являться атрибутом, который присваивается конкретному типу ветви и затем дополнительно определяется для конкретной ветви. Например, для ветви конфликтной ситуации можно автоматически определить текст сообщения о нарушении вида «возникает конфликт между переворотом и отражательной плитой», причем этому событию может также быть присвоен уровень значимости, например, в виде числа от 1 до 10, причем число 10 соответствует самому серьезному нарушению. Соответствующая строка в соотношениях (35) и (36) будет затем наследовать эти предписания из ветвей, из которых они исходят. Альтернативно, если сетевая диаграмма ограничений полностью определена для конкретного процесса формования, индивидуальные сообщения могут вводиться вручную, или автоматически генерируемый устанавливаемый по умолчанию набор может редактироваться, и получаемые в результате данные могут сохраняться в таблице для каждого из конечного числа нарушений, которые могут произойти. Хотя этот ручной подход может, следовательно, демонстрировать некоторое улучшение по читаемости сообщений, он также может быть подвержен ошибкам, и поэтому должен обновляться, если какие-либо изменения сделаны в сетевой диаграмме ограничений. Поэтому предпочтительным является автоматический метод.
Согласно предшествующему уровню техники работа одного из этих механизмов/процессов управляется путем включения механизмов и т.п. средств и их отключения при выбранных углах в пределах 360-градусного цикла. Включение механизма представляет собой событие, и выключение механизма также является событием. На фиг.12 показан обычный список временных событий с соответствующими им моментами времени включения и выключения для многосекционной машины. Данный список может быть получен от средств управления машиной.
Развернутый график может быть преобразован в соответствующий график замкнутого цикла с использованием известного периода цикла и вычисления углов событий по модулю в пределах 360 градусов (угол события = равен по модулю 360 (время события развернутого цикла/период цикла) × 360). Для перехода от графика замкнутого цикла к графику развернутого цикла исходная сетевая диаграмма ограничений дополняется новым множеством направленных ветвей, называемых ветвями развертывания. Часть графа, сформированная из ветвей развертывания, вместе с ветвями перемещения и последовательности, и любыми узлами, присущими этим ветвям, будет называться графом развертывания цикла. Пример графа развертывания цикла показан на фиг.12, которая иллюстрирует цикл прессовыдувного формования. Граф развертывания цикла ((ГРЦ) создается так, чтобы иметь следующие свойства.
Свойство 1. ГРЦ является связным графом.
Свойство 2. Узлы ГРЦ являются точным множеством всех узлов-источников и узлов-адресатов для всех ветвей перемещений и процессов в сетевой диаграмме ограничений (СДО). Это означает, что все углы «включения» и «выключения» времязадающего барабана (контроллера последовательности) представлены на графе.
Свойство 3. Каждая ветвь в ГРЦ является частью цикла (путь от некоторого события к следующему периодическому повторению этого события). Например, самая нижняя линия на фиг.11 проходит следующим образом: M120 («Размыкание зажимов»), M110 («Замыкание зажимов»), М210 («Отвод отставителя») и M120. Аналогичным образом следующая линия выше проходит следующим образом: М210 («Отвод отставителя»), М220 («Отбрасывание назад»), М200 («Подвод отставителя») и М210. Следующая линия выше проходит следующим образом: M190 («Подъем дутьевой головки»), M180 («Опускание дутьевой головки»), р2(«Додувка») и M190. Следующая линия выше проходит следующим образом: МР1000 («Открытие форм для выдувания»), М240 («Закрытие форм для выдувания»). M1000. Следующая линия выше проходит следующим образом: М3100 («Плунжер к позиции загрузки», М230 («Прессование»), М80 («Замыкание горловых колец»), М70 («Замыкание горловых колец») и M100. Следующая линия выше проходит следующим образом: ММР90 («Закрытие черновых форм»), М230, М40 («Плунжер в положение переворота»), М60 («Переворот»), М70 («Обратный поворот»), М90, и первая линия слева проходит следующим образом: МР150 («Подъем отражательной плиты», М140 («Опускание отражательной плиты»), М230, M150 («Подъем отражательной плиты»).
Свойство 4. Ветви, соответствующие узлам ГРЦ, или объединяются, или расходятся, но не то и другое вместе. Т.е., если имеется более одной ветви, направленной к заданному узлу, то имеется только одна ветвь, исходящая из этого узла (объединение). Если имеется более одной ветви, исходящей из заданного узла, то будет иметься только одна ветвь, входящая в данный узел (расхождение).
Вышеуказанные свойства означают, что ГРЦ также имеет следующие дополнительные свойства:
Свойство 5. Любая последовательность из трех узлов, которую могут пересекать две взаимосвязанные ветви, следующие в направлении данной ветви, будут являться частью по меньшей мере одного общего цикла. Таким образом, каждый узел в ГРЦ находится между двумя другими событиями в циклической последовательности.
Свойство 6. Поскольку каждая ветвь в ГРЦ является частью цикла, она должна иметь меньшую длину, чем длительность одного периода.
Задача решается тогда последовательностью шагов, которые включают проверки того, что входные данные надлежащим образом упорядочены для обеспечения действительного решения.
1. Сформировать матрицу инцидентности с ветвлением для ГРЦ.
2. Разделить узлы в ГРЦ на две группы: независимые узлы, значения которых заданы во входном множестве узлов событий замкнутого цикла, и остальные зависимые узлы, углы событий которых еще неизвестны. Для надлежащим образом поставленной задачи все зависимые узлы должны быть соединены с независимым узлом с помощью ветви, продолжительность которой известна.
3. Присвоить известные углы входных событий независимым узлам в ГРЦ, которому они соответствуют.
4. Определить углы событий для зависимых углов событий с использованием следующего уравнения:

где
Θi - угол события, вычисляемый для i-го независимого узла,
Θj - зависимый узел, соединенный с i-ым узлом посредством ветви с известной временной продолжительностью di-j.
Алгебраический знак в уравнении (37) выбирается положительным, если зависимый узел находится ниже по потоку обработки относительно независимого узла, и отрицательным - в противоположном случае.
5. Присвоить угол события для любых периодически повторяющихся узлов, равный значению для узла, который он повторяет (узел, с которым он соединен циклической ветвью в ГРЦ).
6. Проверить, находятся ли все углы событий в корректном циклическом порядке. Это делается путем проверки, что угол события, присвоенный каждому узлу, находится между значением любой пары, состоящей из непосредственно предшествующего, расположенного вверх по потоку обработки узла, и последующего, расположенного вниз по потоку обработки, соседнего узла.
7. Найти угловые длительности для всех ветвей в ГРЦ с использованием следующего уравнения:

где
F - матрица инцидентности с ветвлением для ГРЦ,
Θ - вектор углов узловых событий в ГРЦ,
δ - вектор угловых длительностей ветвей в ГРЦ.
8. Преобразовать вектор δ угловых длительностей ветвей в вектор d временных длительностей с использованием следующего уравнения:

где Т - период цикла.
9. Решить относительно времен узловых событий развернутого цикла с использованием стандартных численных методов возможно переопределенную систему:

где Fr - матрица инцидентности с ветвлением ГРЦ со столбцом, соответствующим опущенному нулевому опорному узлу. (Выбор нулевого опорного узла произволен, но должен быть согласованным с соответствующим выбором СДО.) Хотя приведенная выше система является переопределенной, решение по методу наименьших квадратов в действительности будет иметь нулевую ошибку, так как δ находится в пространстве столбцов матрицы Fr. Это должно быть проверено, чтобы выявить наличие каких-либо вычислительных проблем.
10. Независимым узлам в СДО присваиваются значения с использованием соответствующих моментов времени событий развернутого цикла, которые определяются из уравнения (4). Зависимые узлы в СДО могут быть затем определены, как описано выше.
На фиг.13 представлена блок-схема, иллюстрирующая создание аналитического аппарата. Сначала необходимо определить сетевую диаграмму ограничений для процесса формования бутылок в многосекционной машине 60 (развернутый цикл, включающий последовательные этапы формирования капли стекломассы, ее доставки на участок черновой заготовки, перенос пульки с участка черновой заготовки на участок выдувания и удаление отформованной бутылки с участка выдувания). Затем необходимо преобразовать сетевую диаграмму ограничений в таблицу данных, которая представляет собой компиляцию существенных данных в диаграмме ограничений и включает в себя список всех ветвей и для каждой ветви указывает ее имя, тип, номер начального узла, номер конечного узла и т.д. Это может быть сделано вручную путем анализа графика диаграммы ограничений или с помощью компьютера с использованием компьютеризованного представления диаграммы ограничений. Следующий этап состоит в преобразовании таблицы данных в математическое представление 62, которое затем преобразуется в компьютеризованную модель 64 для ее оценки. В представленном варианте осуществления компьютеризованная модель основана на матричных математических выражениях, но также могут быть использованы и другие математические представления. В зависимости от свойств формуемой бутылки и процесса, используемого для изготовления бутылки (например, прессовыдувное формование, формование выдуванием), могут потребоваться различные таблицы данных. Как показано, некоторое количество таблиц данных («N» таблиц данных) могут быть сохранены в памяти и будут вводиться по мере необходимости.
На фиг.14 показана часть компьютеризованной модели 64, с помощью которой осуществляется развертывание углов событий 360-градусного машинного цикла с получением моментов времени 66 событий процесса формования бутылок. В качестве входных данных модели используются данные, загружаемые из блока управления 42 машиной (фиг.1) или т.п. средства или вводимые вручную с пульта управления, терминала и т.п., представляющие собой углы событий, моменты времени машинного цикла (время цикла для 360-градусного времязадающего барабана для многосекционной машины) и длительности перемещений (длительности «М» для перемещаемых механизмов), а на выходе получают моменты времени событий в процессе формования бутылок. Следует отметить, что хотя углы событий и время машинного цикла обычно представляют собой доступные данные, получаемые из существующего рабочего файла, длительности перемещений должны быть определены для конкретного рабочего процесса.
Фиг.15 иллюстрирует использование данной компьютеризованной модели 64 для анализа развернутого графика в зависимости от ограничений (блок 68) (предотвращение нарушений ограничений). Исходя из моментов времени событий, времени машинного цикла, длительностей перемещений, длительностей субперемещений (длительностей «m» (обозначенных малой «m») перемещений для перемещаемых механизмов), нижних пределов ветвей конфликтных ситуаций, нижних пределов последовательных ветвей и границ «N» процессов термообработки в качестве входных данных, компьютеризованная модель может определить, будет ли иметь место нарушение ограничений (блок 70). Хотя понятие «ввод» означает, что вводимая информация становится доступной, она может обеспечиваться из различных источников. Например, углы событий и время машинного цикла могут быть доступными из существующего рабочего файла, в то время как остальные входные данные должны вводиться в момент ввода таблицы данных на этапе 62 преобразования таблицы данных в математическое представление.
Всякий раз ввод данных может иметь диапазон значений, выбор из которого может делаться оператором, причем такой ввод данных должен включать в себя верхний и нижний пределы этих входных данных, и предусматривать выбор: либо настройка должна быть фиксирована на конкретном значении, либо может устанавливаться произвольно на любом значении в заданных пределах. Номинально нижние пределы для столкновений и последовательных ветвей могут быть установлены на нуль или на выбранный допустимый предел ошибки, и это может фиксироваться оператором, или оператору может быть обеспечен доступ к этим входным данным, чтобы он мог определить любые требуемые нижние пределы. Одним из нарушений графика будет являться график, который приводит в результате к получению неверной последовательности. Другим может быть график, который может привести к конфликтной ситуации. Любое из этих нарушений ограничений может быть определено без использования пределов «N» длительностей процессов термообработки. При использовании этого дополнительного ввода данных развернутый график может быть оценен для определения того, будут ли одна или несколько длительностей процессов термообработки слишком короткими или слишком длинными и тем самым будут нарушать одно или более ограничений процессов термообработки. Эти входные и выходные данные, а также входные и выходные данные, рассмотренные ниже в других вариантах осуществления, могут быть представлены для просмотра на соответствующем экране.
Если любой запрос приводит к получению утвердительного результата, то система управления вызовет приведение в действие предупредительной сигнализации и/или отклонение ввода данных (блок 74) и выдачу состояния нарушения ограничений (блок 76). Если запрос не приводит к получению утвердительного ответа, то система управления может выдать вычисленные допуска (блок 78), чтобы дать оператору информацию о том, каким образом уплотнить график, и затем преобразует моменты времени событий в углы событий и распечатывает углы событий и новое время машинного цикла (блок 79). «Распечатывание» здесь означает представление данных в читаемой форме для оператора, например, в виде выходных данных, представляемых на экране, или в виде документа или машиночитаемой формы, чтобы система управления машины могла автоматически использовать данные, например, для настройки машины с использованием новых углов событий и времени машинного цикла.
В одном из режимов многосекционная машина может приводиться в действие, и оператору может потребоваться изменить один или более углов событий в 360-градусном времязадающем барабане. Конкретный процесс уже выполняется и базовые данные для этого процесса (длительности и пределы) уже введены в систему управления. Эти данные вместе с временем машинного цикла могут быть загружены из системы управления. Углы событий, включающие любое предусматриваемое изменение углов событий, могут быть загружены в модель 66 развертывания цикла, так что моменты времени событий могут быть определены. В другом режиме оператор может иметь запись (углы событий и время машинного цикла) процесса, который выполнялся ранее, и ему может потребоваться оценить некоторые изменения перед началом выполнения работы.
В обычной многосекционной машине, которая имеет ряд механизмов, которые приводятся в действие посредством пневматических цилиндров, длительности перемещений и длительности субперемещений могут быть определены эмпирически, например, с помощью быстродействующих камер. Там, где взаимовлияния обусловлены исполнительными механизмами, которые смещаются в соответствии с профилями перемещений, зоны субперемещений могут быть определены либо эмпирически, либо математически.
На фиг.16 иллюстрируется использование этой компьютеризованной модели для контроля длительностей процессов термообработки. С использованием моментов времени событий, длительностей перемещений, длительностей субперемещений и времени машинного цикла, известных, или в качестве введенных данных, компьютеризованная модель 64 будет анализировать график развернутого цикла по отношению к длительностям процессов термообработки (блок 80), и затем компьютеризованная модель 64 будет выдавать на выход длительности процессов термообработки (блок 82). Оператор может соответственно в любой момент времени наблюдать длительности процессов термообработки и, основываясь на своем опыте, вносить изменения в углы событий пределах 360 градусов и во время машинного цикла. При использовании пределов «N» длительностей процессов термообработки в качестве дополнительных входных данных компьютеризованная модель может также выдать на выходе допуска для «N» длительностей процессов термообработки, так что оператор может видеть, где находится время любого процесса по отношению к допустимому временному окну.
Фиг.17 иллюстрирует использование компьютеризованной модели для определения, для существующей настройки машины, оптимизированного времени цикла и оптимизированных значений углов событий для этого графика. С использованием длительностей перемещений, длительностей субперемещений, нижних пределов конфликтных ситуаций для ветвей, нижних пределов для последовательных ветвей, моментов времени событий, времени машинного цикла и статуса целевого или фиксированного значения для оптимизированного времени машинного цикла, известных или введенных на этапе оптимизации графика развернутого цикла для минимального времени цикла (блок 82), компьютеризованная модель 64 будет определять наличие осуществимого графика (блок 83). Если такого графика нет, то модель будет отклонять введенные данные (блок 85). Время машинного цикла и моменты времени событий могут быть введены из модели развертывания цикла, а время оптимизированного машинного цикла может быть введено оператором. Только моменты событий и время машинного цикла необходимы для определения длительностей процессов термообработки, так что эти значения могут быть фиксированы перед осуществлением оптимизации. Эквивалентными входными данными могут быть длительности процессов термообработки. Оператор может установить целевое значение времени оптимизированного машинного цикла на нуль при нефиксированном статусе, и компьютеризованная модель будет пытаться оптимизировать предлагаемый график при минимальном возможном времени цикла. В случае если оператор принимает решение не уменьшать машинный цикл с текущего значения времени машинного цикла до самого короткого значения времени машинного цикла, то он может предпочесть снизить время цикла до некоторого значения времени машинного цикла, находящегося между этими двумя значениями. Он может установить целевое значение времени оптимизированного машинного цикла на значение времени, промежуточное между текущим временем машинного цикла и самым коротким временем машинного цикла, при фиксированном статусе. Если имеется осуществимый график, то модель будет преобразовывать оптимизированные значения моментов времени событий в углы событий (блок 84) и распечатывать углы событий и новое время машинного цикла (блок 86) для цикла этого графика, так что он будет доступным для ввода в блок контроллера системы управления машины.
Фиг.18 иллюстрирует использование компьютеризованной модели 64 для настройки и управления многосекционной машиной в соответствии с вводами данных оператором, определяющими одну или более длительностей процессов термообработки (длительность «N» процесса термообработки и связанные с ней целевые значения, пределы и статус фиксированных значений). При вводе времени машинного цикла и моментов времени событий (или длительностей процессов термообработки), а также при вводе длительностей перемещений, длительностей субперемещений, нижних пределов конфликтных ситуаций для ветвей, нижних пределов последовательности, блок 88 оптимизации графика развернутого цикла компьютеризованной модели 64 будет определять, имеется ли осуществимый график (блок 90). Как показано на чертеже, имеется дополнительный ввод длительности «N» процессов термообработки, который включает в себя целевое значение времени, пределы и статус фиксированных значений.
Оператор может, например, принять решение, что дефект возникает из-за того, что время подогрева недостаточно, и ввести предлагаемое новое значение времени подогрева. Оператор может также ввести более одного нового значения длительностей N1, N2,... процессов термообработки в ходе автономной (офлайновой) оценки процесса. В любом из этих режимов значения углов событий для всего графика должны быть доступными, и все они могут быть введены оператором или загружены из системы управления машины.
Если нет осуществимого графика, то компьютеризованная модель отклонит вводы данных (блок 92). Если график осуществим, то компьютеризованная модель выдаст на выход значения длительностей процессов термообработки (блок 89). Такой вывод данных может представлять собой, например, распечатку для каждой длительности целевой длительности, указание на то, фиксирована или нет соответствующая целевая длительность, и действительную длительность, находящуюся в пределах окна между верхним и нижним пределами для длительности. Если имеется решение, то блок 84 преобразования оптимизированных значений моментов времени событий в углы событий компьютеризованной модели преобразует значения моментов времени событий в углы событий и переходит к распечатке углов событий и нового времени машинного цикла (блок 94).
Фиг.19 иллюстрирует использование компьютеризованной модели для полной оптимизации графика. Данные времени машинного цикла, значений моментов времени событий, длительностей перемещений, длительностей субперемещений, длительностей процесса термообработки, длительностей конфликтных ситуаций для ветвей и длительностей последовательных ветвей, которые представляют собой целевые значения, вводятся в блок 96 оптимизации графика развернутого цикла. Кроме того, также вводится ряд предельных значений: 1) минимальная/максимальная длительность «N» перемещения, 2) минимальная/максимальная длительность «N» процесса термообработки, 3) минимальная/максимальная ветвь «N» конфликтной ситуации, 4) минимальная/максимальная ветвь «N» последовательности. Минимальная/максимальная длительность «N» перемещения относится к перемещениям, которые обеспечиваются серводвигателем и могут селективно варьироваться. При задании этих входных данных блок оптимизации графика развернутого цикла находит оптимизированный график, если существует такой осуществимый график. В случае если результат проверки в блоке 98 наличия осуществимого графика отрицательный, то оператору будет выдана рекомендация об изменении пределов (блок 100), и оператор будет пытаться найти решение путем изменения предельных значений. При положительном результате проверки в блоке 98 система управления может установить ветви конфликтных ситуаций/последовательности на максимальное значение, зафиксировать все остальные длительности и вновь оптимизировать график развернутого цикла (блок 101). Это позволит максимизировать данные ветви, чтобы дополнительно снизить вероятность конфликтных ситуаций, обусловленных неправильной последовательностью. Компьютеризованная модель будет затем преобразовывать моменты времени событий в углы событий (блок 102), распечатывать углы событий и новое время машинного цикла (блок 104) и выдавать на выходе оптимизированные длительности и соответственно пределы (блок 106). Соответственно оператор имеет возможность манипулировать графиком развернутого цикла в целом. Он может начать с существующего рабочего файла, который традиционно должен иметь время цикла, углы событий и длительности ветвей, соответствующих перемещениям, реализуемым серводвигателем, и действовать для определения оптимизированного графика. Альтернативно он может ввести длительности процесса термообработки и преобразовать их в моменты времени событий (для облегчения анализа, проводимого оператором, вся эта информация может быть отображена на экране).
Как показано на фиг.20, если существует осуществимый график (блок 107), компьютеризованная модель может определить, имеется ли действующее ограничение (ограничения), которое препятствует дальнейшей оптимизации (блок 108), и выдать на выходе данные такого действующего ограничения (ограничений) (включая направление оптимизации при преодолении ограничения) (блок 110). Например, компьютеризованная модель может показать, что ограничение, препятствующее оптимизации, соответствует времени охлаждения формы для выдувания. Это позволяет оператору решать данную конкретную проблему для увеличения потока охладителя для форм. Если решение проблемы отсутствует, то оператору дается рекомендация об изменении пределов (блок 100).
Фиг.21 иллюстрирует использование данной технологии для оптимизации износа механизма, приводимого в действие серводвигателем. Здесь компьютеризованная модель 64 используется для оптимизации графика развернутого цикла, и если решение существует (блок 107), то следующим этапом для компьютеризованной модели является оптимизация графика развернутого цикла путем фиксации всех переменных за исключением длительностей действия серводвигателя и установки длительностей действия серводвигателя на максимальное значение 112. На следующем этапе компьютеризованная модель распечатывает оптимизированное значение длительности для серводвигателя «N» и подает оптимизированное значение длительности для серводвигателя «N» на контроллер серводвигателя «N» (блок 114), после чего будет осуществляться маршрутизация длительности для серводвигателя «N» с контроллера серводвигателя «N» на плату возбуждения усилителя серводвигателя «N» (блок 116), что приводит к переходу на оптимизированную длительность в цифровом процессоре сигналов усилителя (блок 118). Цифровой процессор сигналов усилителя может, например, масштабировать нормированный профиль перемещения для механизма, чтобы обеспечивать его возбуждение в соответствии с конкретной длительностью перемещения. В данной среде идеальным двигателем, пригодным для настройки таким путем, является серводвигатель, который имеет нормированный профиль перемещений, который может масштабироваться от минимальной длительности до максимальной длительности. Хотя предпочтительным вариантом осуществления профильного исполнительного элемента является серводвигатель, однако могут использоваться и другие типы электродвигателей, например шаговый двигатель.
Вышеописанная система управления может быть использована в стеклоформующей машине как непосредственно, в качестве составной части системы управления машины, так и косвенно, в качестве системы управления машины, которая управляется виртуально для целей оценки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2286960C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2285671C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2285672C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2286955C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2286959C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2286957C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2286956C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2285673C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 2005 |
|
RU2384529C2 |
| Вакуумно-выдувная машина | 1973 |
|
SU461066A1 |
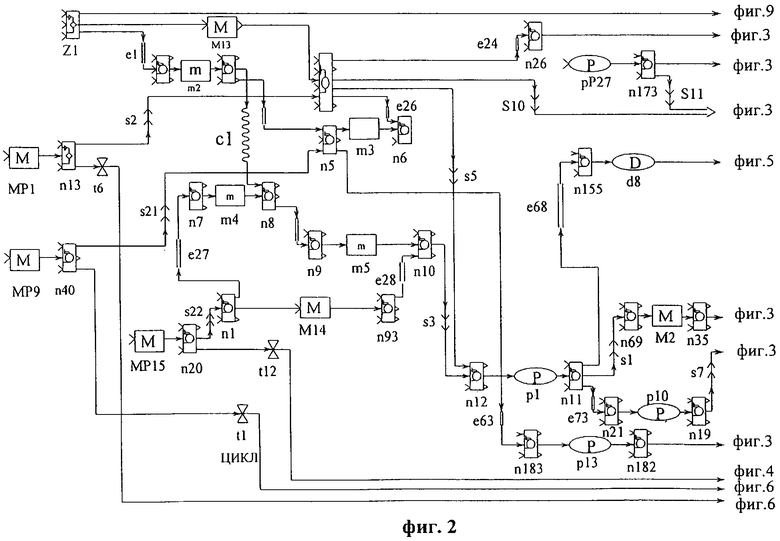
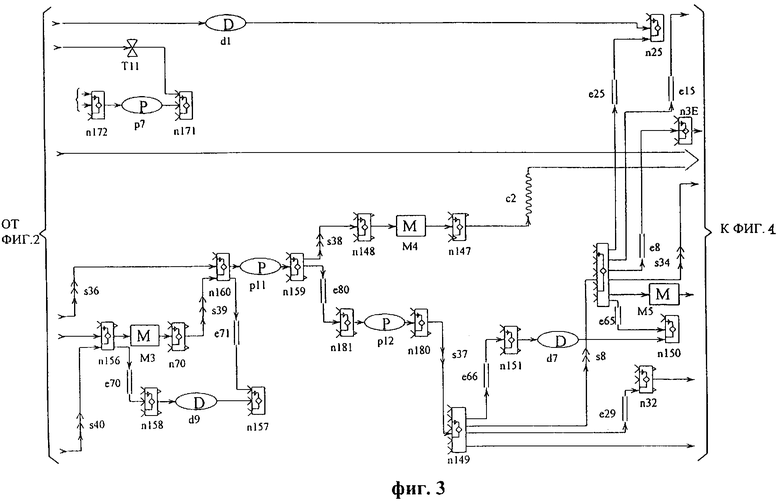
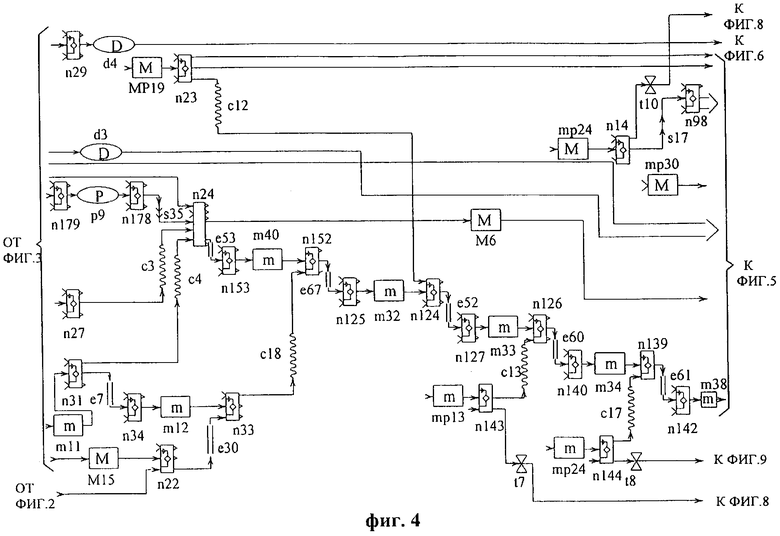
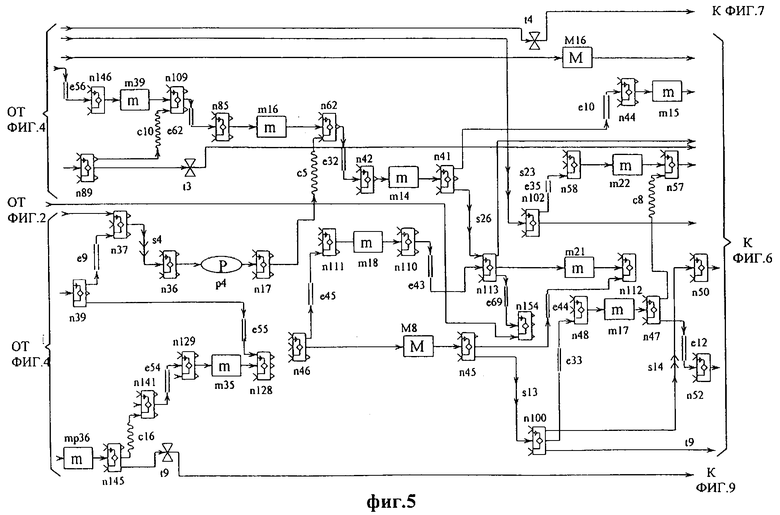
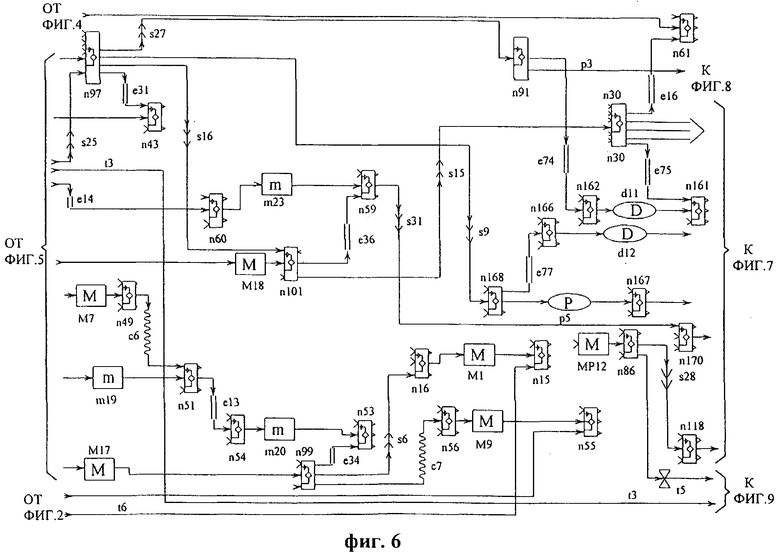
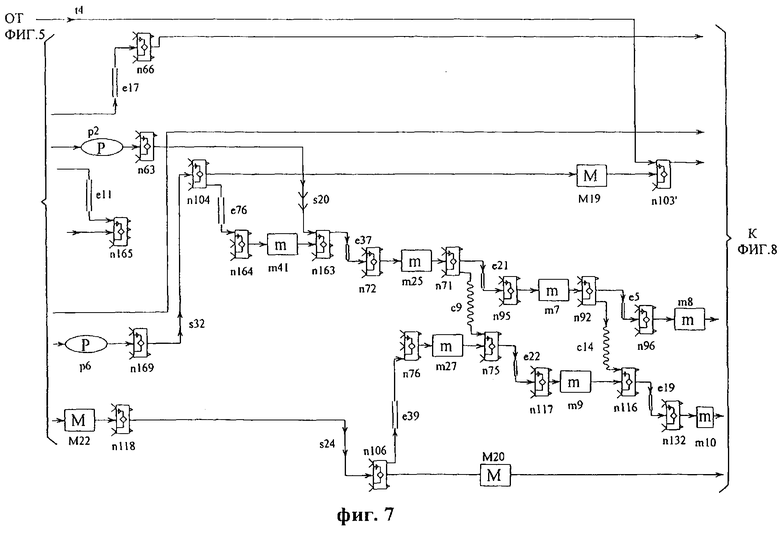
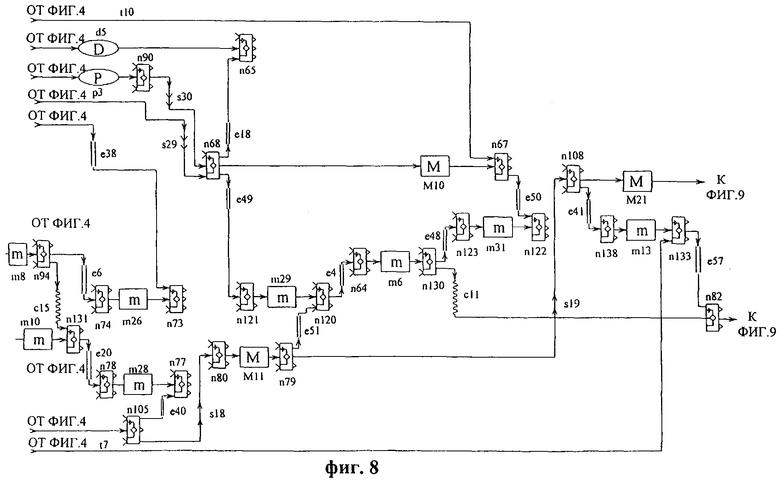
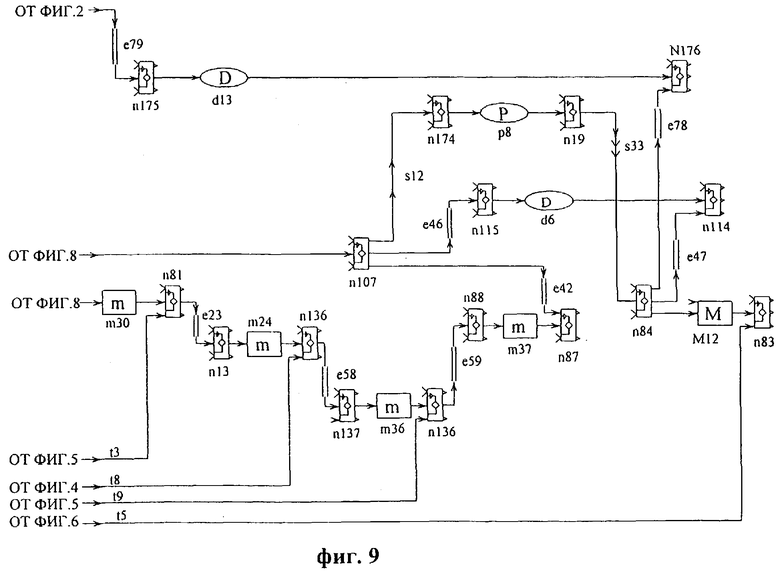
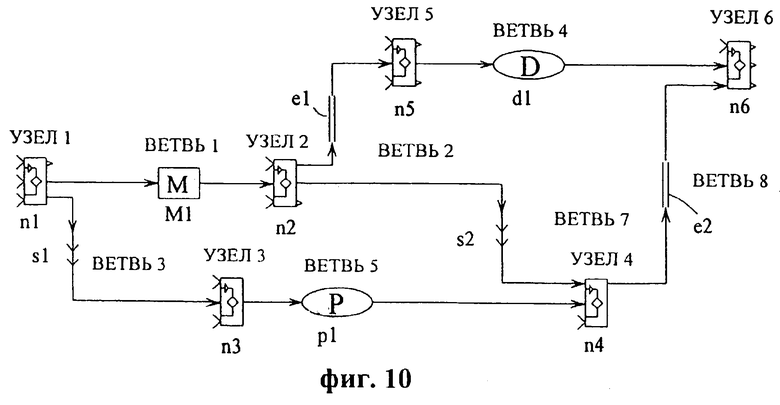
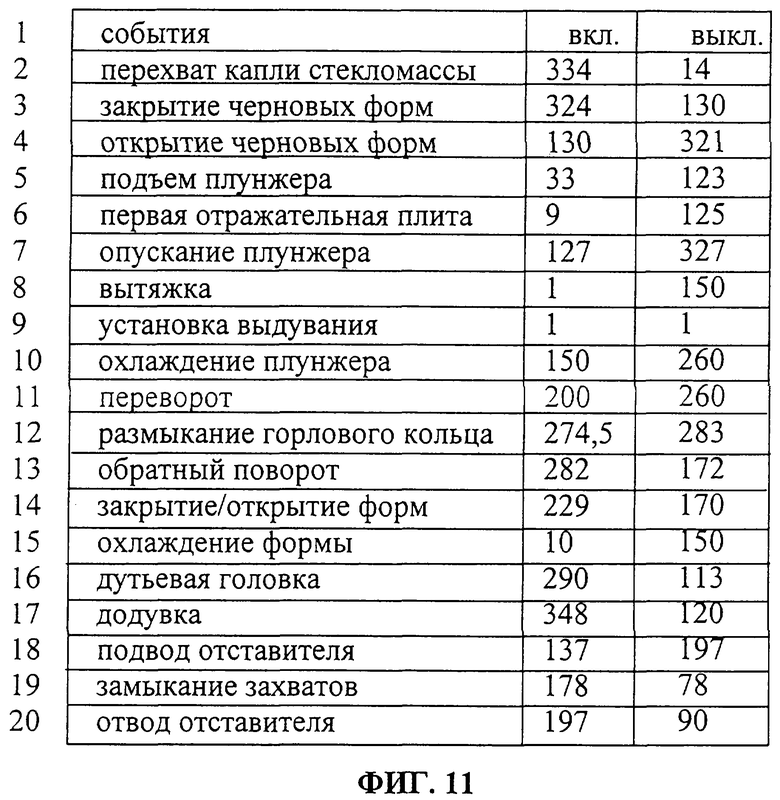
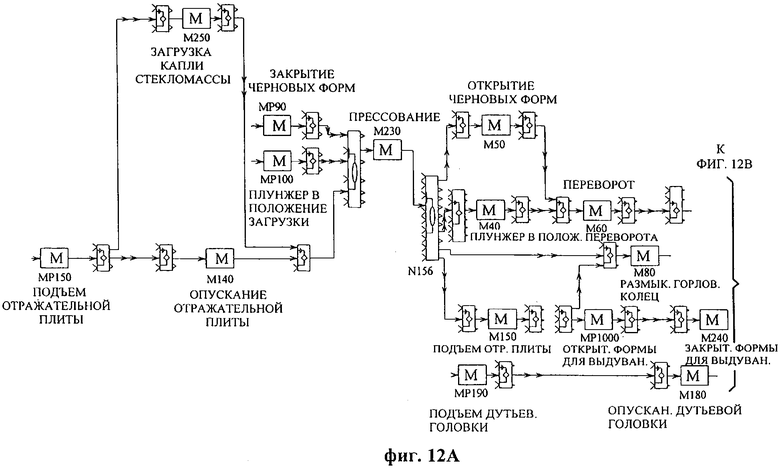
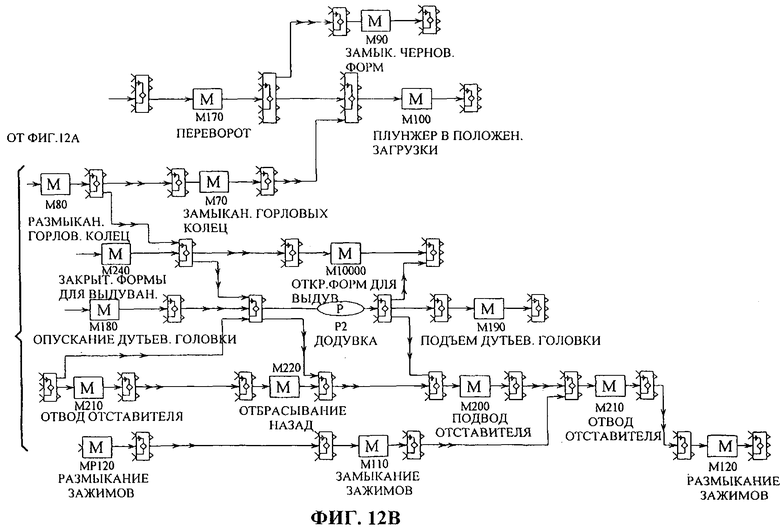
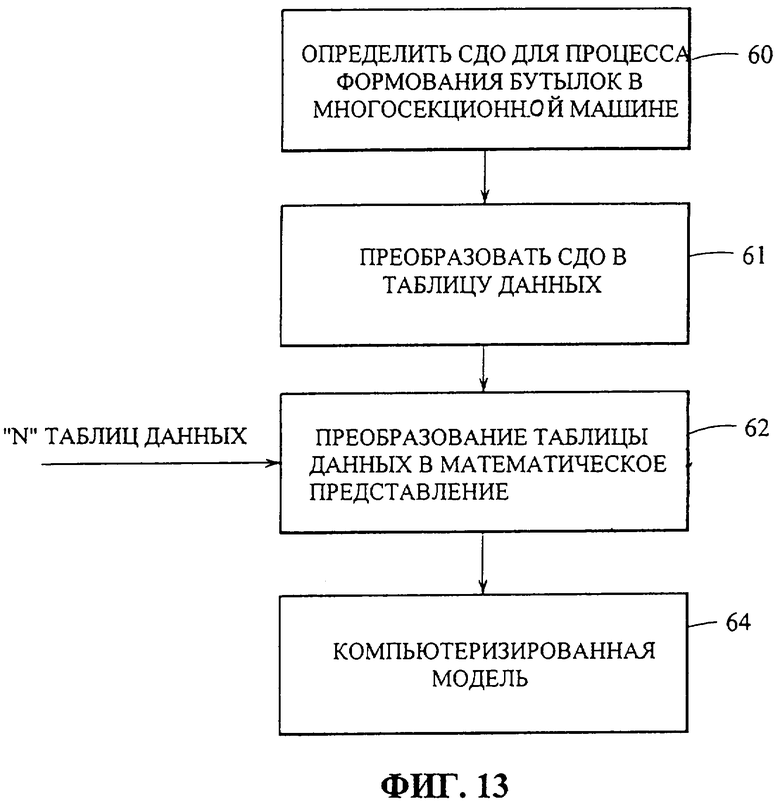
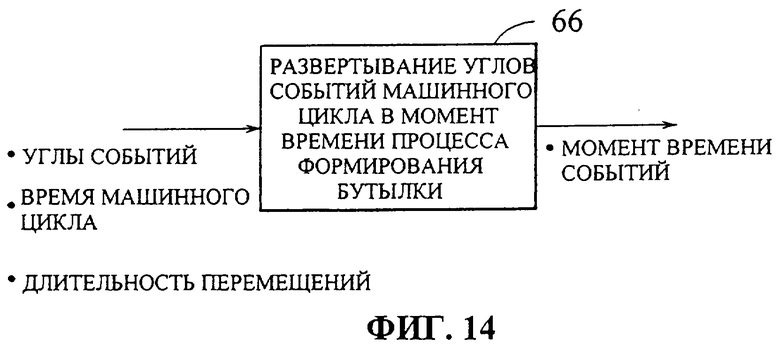
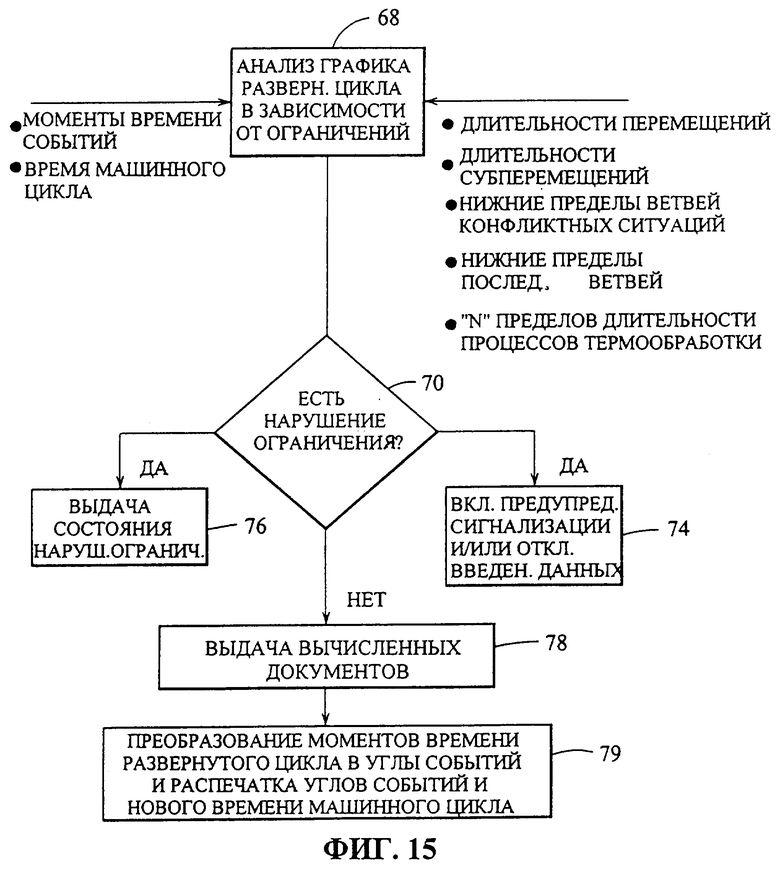
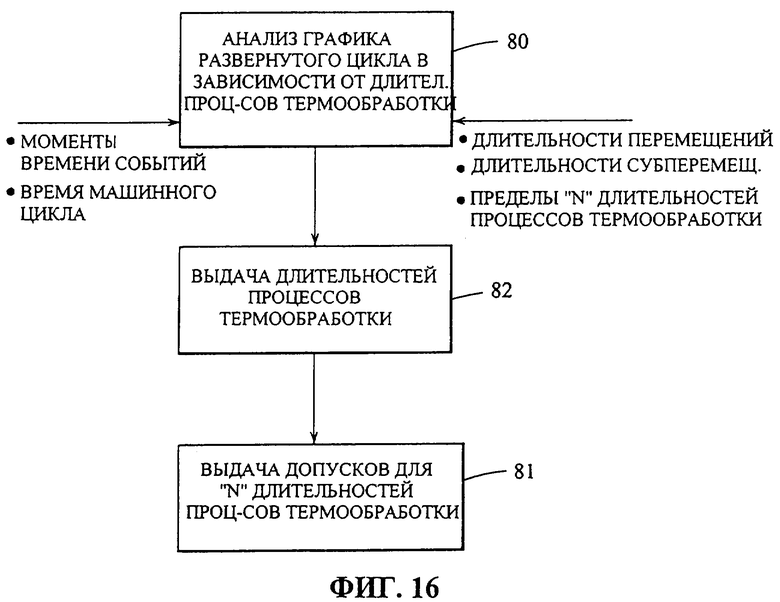
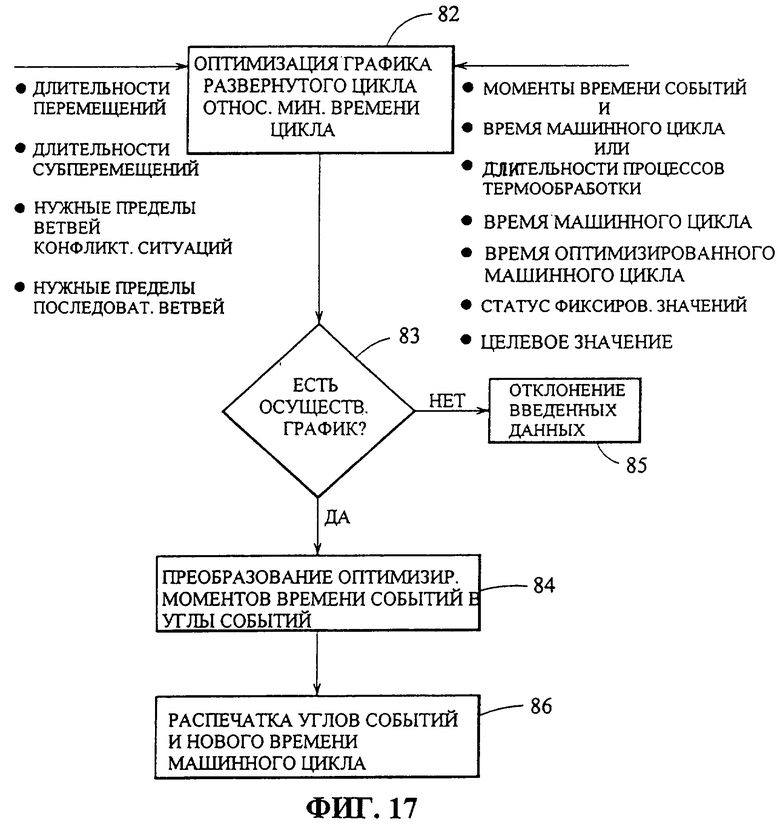
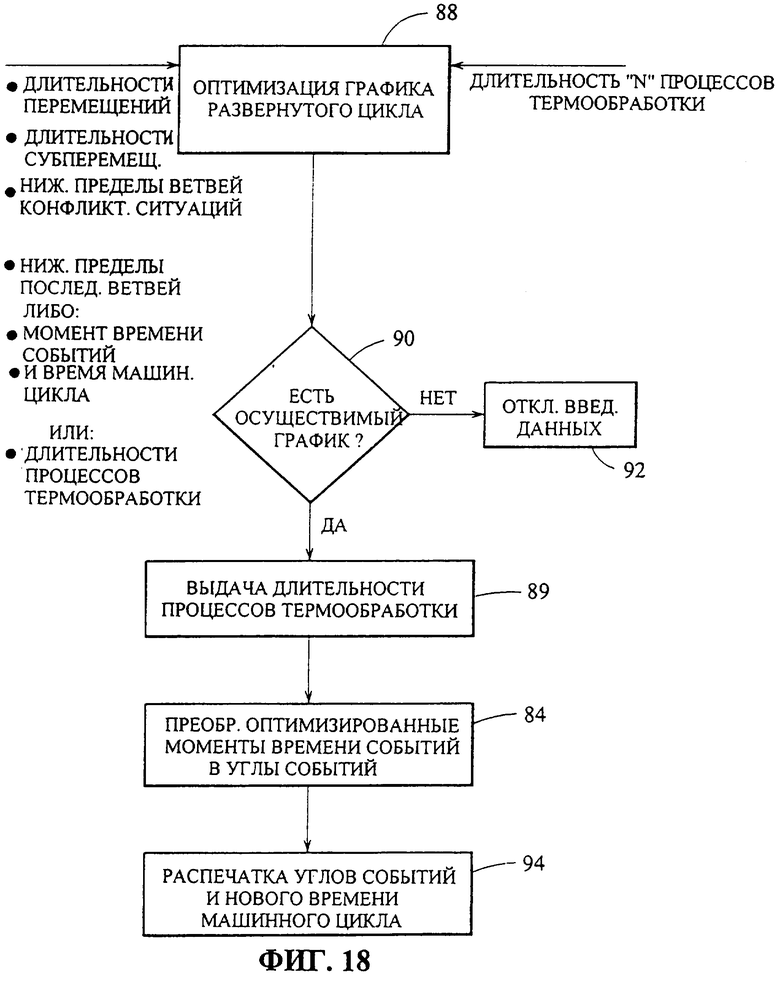
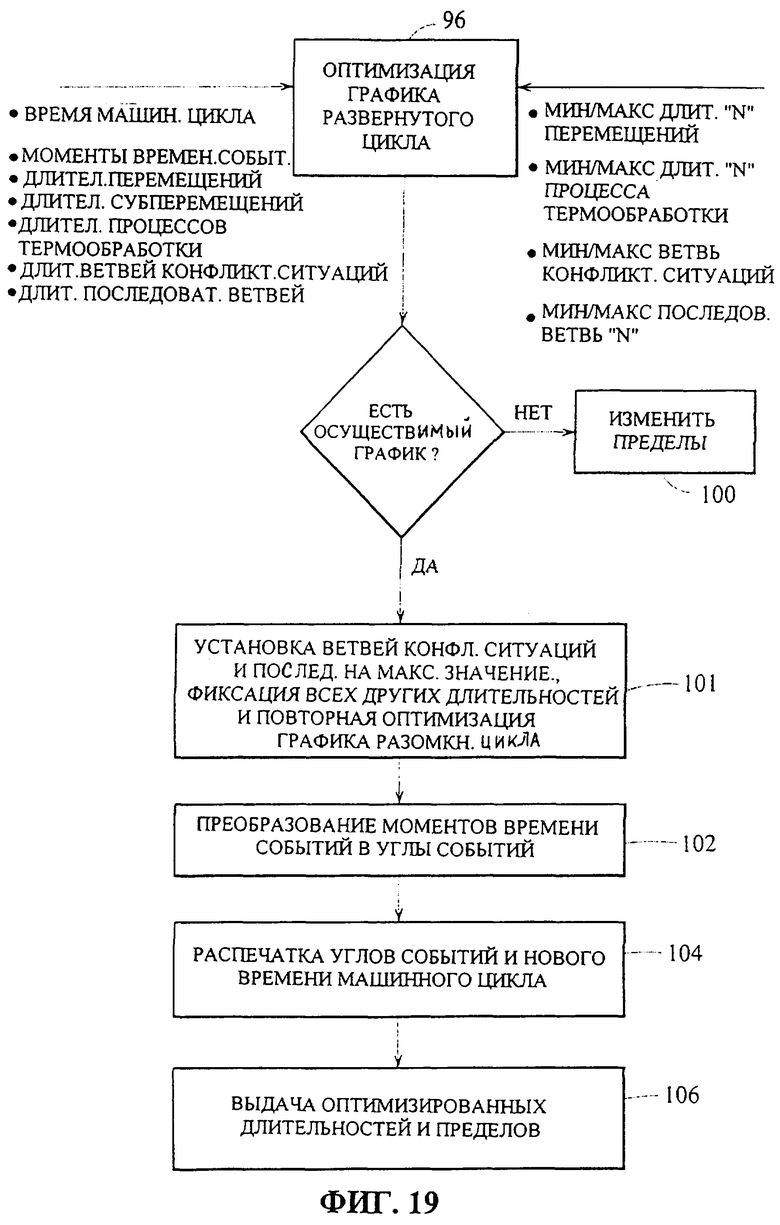
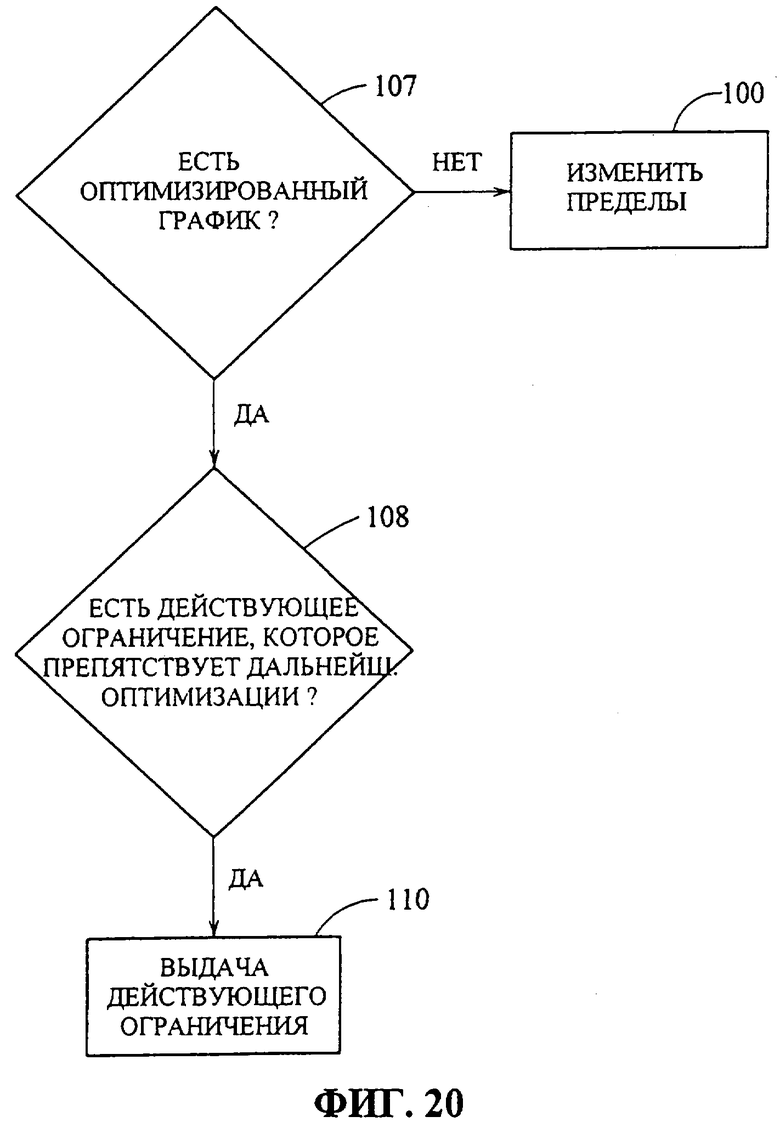
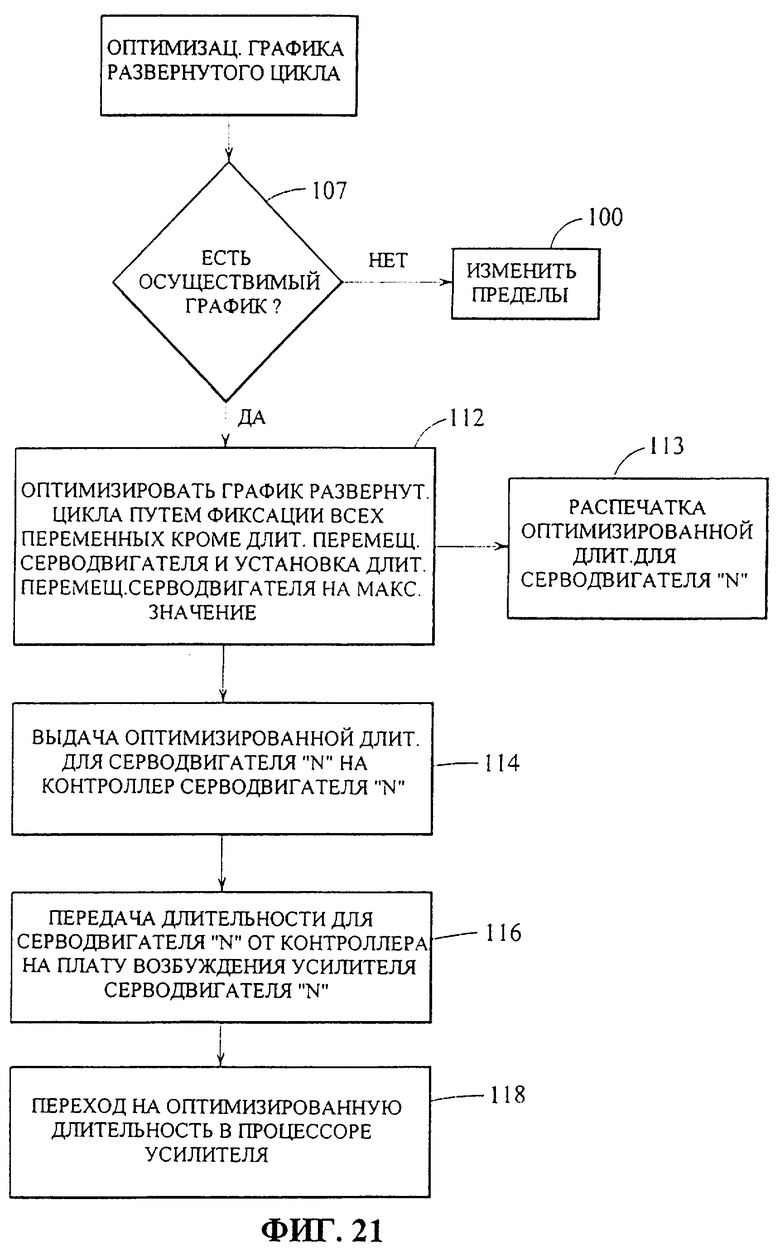
Изобретение относится к управлению многосекционной стеклоформующей машиной. Техническим результатом является усовершенствование системы управления и повышение производительности. Устройство для развертывания машинного цикла для использования со стеклоформующей машиной, которая управляется программируемым формирователем последовательности, который определяет 360-градусный машинный цикл, имеющий установленное время цикла. Устройство для развертывания цикла преобразует углы включения и выключения формирователя последовательности замкнутого 360-градусного цикла во времена событий процесса формования бутылок развернутого цикла, который требует для завершения более двух машинных циклов. 2 н. и 5 з.п. ф-лы, 21 ил.
| US 3877915 А, 15.04.1975 | |||
| Система автоматического управления многосекционной машиной для формования стеклянных изделий | 1979 |
|
SU1145922A3 |
| Система автоматического управления машиной для изготовления стеклянных изделий | 1979 |
|
SU1034601A3 |
| US 3899915 A, 19.08.1975 | |||
| US 5486995 A, 23.01.1996 | |||
| US 5345389 A, 06.09.1994 | |||
| US 4783746 A, 08.11.1988. | |||

