Заявляемое изобретение относится к области электротехники, в частности, к системам и способам повышения надёжности работы электропривода с многоуровневым инвертором, основанным на обратном преобразовании кинетической энергии, электродвигателя нагрузки, в электрическую энергию путем снижения частоты на выходе электропривода.
В настоящее время существует множество технологических процессов, требующих непрерывности производства или постоянного поддержания заданных условий, среди которых: работа систем вентиляции, производство химического волокна, изделий из стекла и др. При этом работа электропривода должна поддерживаться непрерывно даже в случае кратковременного сбоя сети. Особенно важно, чтобы электроприводы, получающие электроэнергию от преобразователей промежуточного напряжения, не подвергались десинхронизации в период сбоев питающей сети.
Продолжительные сбои питающей сети могут быть успешно устранены с помощью систем использования кинетической энергии, накопленной в ведомых двигателях и нагрузке. Техническая целесообразность использования таких систем состоит в том, что рабочий механизм и ее приводная система могут обладать значительным моментом инерции, причём, кинетическую энергию нагрузки можно использовать для поддержания работы электропривода. Более того, должны быть предусмотрены средства для медленного снижения скорости вращения электродвигателя при сбое сети для повышения эффективности использования кинетической энергии.
Из патента на изобретение США, US9543748B2 от 10.01.2017 известна система защиты от неисправностей энергосистемы динамически позиционируемого судна. Энергосистема разделена на две или более секции энергосистемы, каждая из которых включает секцию шины распределения энергии. Система защиты от неисправностей включает в себя систему изоляции неисправностей, которая включает в себя автоматический выключатель для каждой секции энергосистемы для разрыва соединения, обеспечиваемого соединительной сеткой. В так называемом «восстановительном состоянии» переменное напряжение, создаваемое электродвигателем, затем выпрямляется инверторным каскадом электропривода, то есть антипараллельными или свободно подключенными диодами, которые параллельны каждому IGBT-транзистору в секции инвертора. Диоды действуют как двухфазный (или трехфазный) мост и преобразуют генерируемое напряжение переменного тока в напряжение постоянного тока, которое затем используется для поддержания напряжения на шине постоянного тока выше определенного порогового значения напряжения. Выходная частота каскада инвертора может понижаться по мере необходимости для регенерации и преобразования накопленной кинетической энергии в электрическую энергию для поддержания напряжения на шинах постоянного тока выше порогового значения, поддерживая при этом работоспособность электропривода. Электропривод двигателя готов продолжить работу до тех пор, пока двигатель не достигнет скорости вращения, равной нулю.
К недостаткам описанного технического решения можно отнести неточное регулирование напряжения из-за отсутствия возможности контроля и изменения параметров тока управляемого электродвигателя.
Также из патента на изобретения США US4379325A от 01.08.1980 известна система для преодоления сбоя в сети, причем система относится к типу устройства, в котором кинетическая энергия в нагрузочных двигателях преобразуется в электрическую энергию за счет снижения частоты работы преобразователя, причем устройство включает:
средство контроллера, имеющее вход для приема первого сигнала напряжения, соответствующего разнице между желаемым и фактическим значениями напряжения преобразователя и
средство преобразователя частоты, соединенное с указанным средством контроллера для выработки сигнала коррекции частоты для понижения рабочей частоты и указанного связанного с ним желаемого значения напряжения преобразователя, в результате чего двигатели нагрузки работают сверхсинхронно, как генераторы для подачи электрической энергии на преобразователь при сбое сети.
К недостаткам описанного технического решения можно отнести отсутствие постоянного контроля напряжения электропривода и возможности контроля и изменения параметров тока управляемого электродвигателя.
Технической задачей, на решение которой направлено изобретение, является повышение надежности системы включающей частотно регулируемый электропривод и управляемый электродвигатель при просадках питающего напряжения.
Технический результат, достигнутый от реализации заявленного изобретения, заключается в повышении точности регулирования напряжения электропривода и тока управляемого электродвигателя.
Сущность заявленного изобретения заключается в том, что при пропадании питающего напряжения электропривод переводят в режим «Поддержания постоянного напряжения» звена постоянного тока, при этом непрерывно контролируют величину питающего напряжения электропривода, согласно которой регулируют напряжение «Ud» звена постоянного тока электропривода и величину полного тока «Iп» электродвигателя.
Согласно преимущественному варианту реализации изобретения, в режиме «Поддержания постоянного напряжения» используют ПИ регулятор напряжения звена постоянного тока «Ud» и ПИ регулятор полного тока «Iп» электродвигателя.
В режиме «Поддержания постоянного напряжения» используют, по меньшей мере, ПИ регулятор напряжения «Ud» звена постоянного тока и ПИ регулятор полного тока «Iп» электродвигателя.
Возможен вариант, при котором посредством ПИ регулятора напряжения «Ud» звена постоянного тока регулируют выходную частоту «f» многоуровневого инвертора, регулируя напряжение звена постоянного тока, причём, для увеличения напряжения «Ud» снижают выходную частоту (f-Df).
Также, управляют величиной полного тока «Iп», посредством ПИ регулятора полного тока электродвигателя, контролируя величину амплитуды задания выходного напряжения (Um+DUm).
С целью поддержания в заданном диапазоне напряжения звена постоянного тока «Ud» регулируют и выравнивают напряжения «Ud» звеньев постоянного тока фаз многоуровневого инвертора, контролируя задание амплитуды напряжения «Um» в каждой фазе питающего напряжения.
Сущность заявляемого изобретения поясняется, но не ограничивается приведенными графическими материалами:
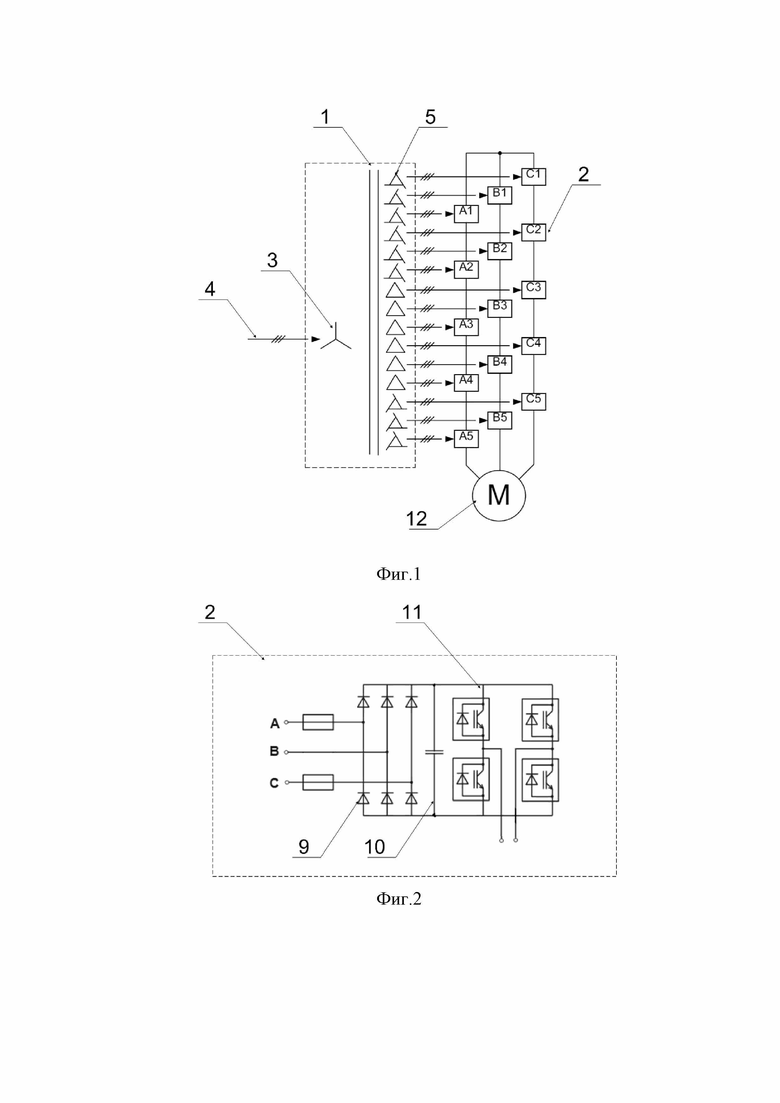
фиг.1 – функциональная блок-схема ЧРП;
фиг.2 – блок схема силовых ячеек частотно регулируемого электропривода;
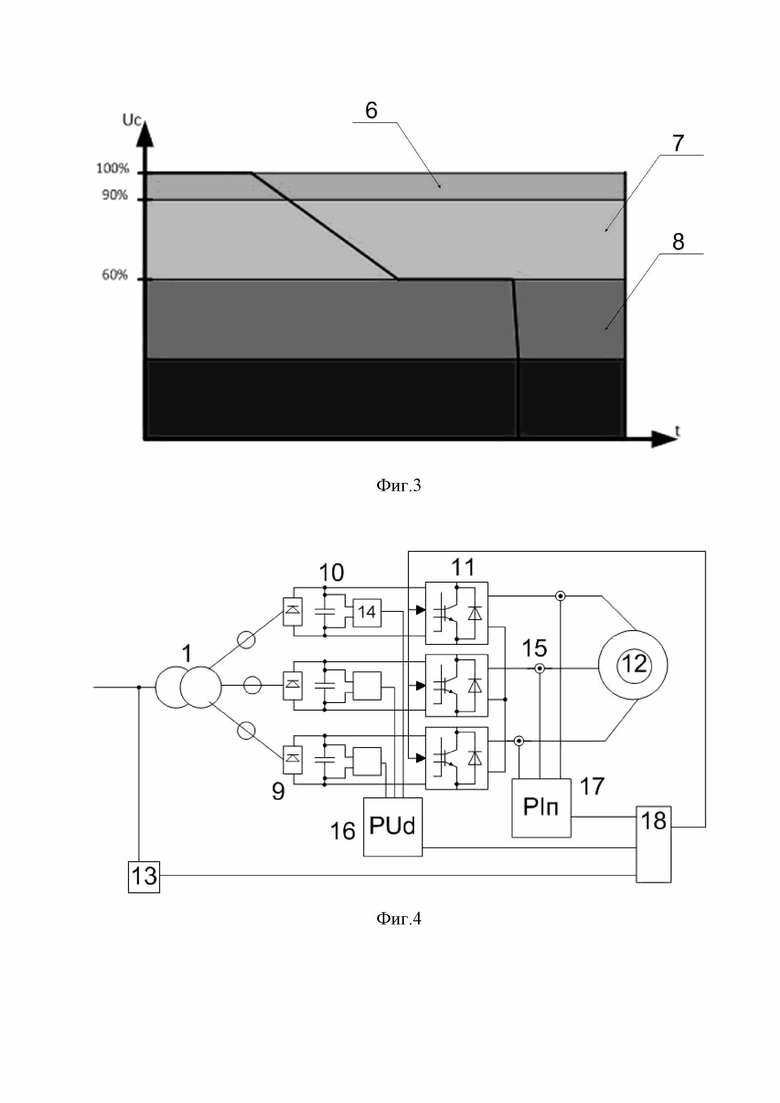
фиг.3 – график изменения состояния системы при просадках и отключениях напряжения;
фиг.4 – блок схема устройства поддержания постоянного напряжения звена постоянного тока частотно регулируемого электропривода.
Заявляемое изобретение может быть реализовано на базе частотно регулируемого электропривода (ЧРП) с управляемым многоуровневым инвертором для формирования сигналов широтно-импульсной модуляции (ШИМ) управления электродвигателем, например асинхронным электродвигателем (АД).
Согласно преимущественному варианту реализации, ЧРП выполнен двухзвенным по структуре преобразования ac-dc-ac (переменный - постоянный - переменный ток) с одним входным силовым трансформатором 1 (фиг.1) и набором силовых ячеек инвертора 2. Силовые ячейки могут быть выполнены по схеме H-Bridge (фиг.2) (однофазный мостовой инвертор напряжения). Блок конденсаторов силовых ячеек 2 формирует звено постоянного тока. Последовательное соединение пяти силовых ячеек в одной фазе, обеспечивает возможность управления двигателями с напряжением не менее 6 кВ.
Входной трансформатор 1 первичной обмоткой 3 (соединение звездой) подключается к трехфазной сети 4. Трансформатор может быть изготовлен в сухом исполнении с воздушным охлаждением. Вторичные обмотки 5, могут быть соединены по схеме «зигзаг», каждая группа вторичных обмоток отличается фазовым смещением трансформируемого напряжения.
Такое техническое решение позволяет уменьшить влияние преобразователя частоты на питающую сеть.
Последовательное включение силовых ячеек позволяет обеспечить работу
в режиме многоуровневого преобразования с ШИМ преобразованием. Такой режим позволяет снизить амплитуду пульсаций выходных фазных напряжений, пропорционально количеству силовых ячеек в фазе. Суммарное выходное напряжение получается за счет суммирования напряжений силовых ячеек в каждой фазе.
Заявленный способ, также может быть реализован на базе электропривода представленного в виде транзисторного автономного инвертора напряжения (АИН) с промежуточным звеном постоянного тока. Входной (сетевой) выпрямитель — диодный, неуправляемого типа с цепями предварительного заряда звена постоянного тока. АИН, выполнен на транзисторах IGBT.
Система управления ЧРП содержит, по меньшей мере, микропроцессорный контроллер (МК) с набором алгоритмов управления, реализованных на базе центрального процессора ЦП, указанного МК.
Указанная система управления ЧРП выполнена с возможностью работы в, по меньшей мере, трех режимах в зависимости от значения питающего напряжения сети «Uc» по отношению к номинальному «Uн».
Во время просадок питающего напряжения, с целью повышения надежности ЧРП рабочего механизма, задействованы режимы работы ЧРП, приведенные на (фиг.3), каждый из которых сменяет друг друга при возникновении условий его работы.
В частности:
- «режим поддержания выходного напряжения» 6 работает при условии, если напряжение сети «Uc» находится в допуске +10%...-15% от номинального значения «Uн»;
- «режим ограничения выходной мощности» 7. При кратковременных или длительных просадках напряжения сети «Uc» до уровня 85%...55% от номинального значения сетевого напряжения «Uн», то ЧРП обеспечивает ограничение выходной мощности. Данный режим заключается в снижении выходного напряжения и выходной частоты до уровня, который возможно поддерживать, при текущей просадке напряжения «Uc». При этом сохраняется работоспособность системы, но отдаваемая мощность будет временно снижена.
- «режим поддержания постоянного напряжения» 8 в звене постоянного тока. При кратковременных или длительных просадках напряжения «Uc» до уровня 55%...0% от номинального значения «Uн» сетевого напряжения напряжение питающей сети. Как известно из уровня техники, принцип работы в таком режиме заключается в следующем: преобразователь частоты отбирает часть кинетической энергии для пополнения заряда конденсаторных батарей звена постоянного тока силовых ячеек инвертора 2, что позволяет поддерживать ЧРП в рабочем состоянии, готовым к мгновенному пуску электродвигателя при нормализации питающего напряжения. Как только напряжение сети поднимется до 55% от номинального, ЧРП сначала переходит в «режим ограничения выходной мощности», а потом, при достижении 85% от номинала сетевого напряжения, в «режим поддержания выходного напряжения» и заданных рабочих параметров вращающегося механизма путем регулирования выходного напряжения при помощи ШИМ. «Режим поддержания постоянного напряжения» позволяет сохранять работоспособность при глубоких кратковременных и длительных просадках напряжения питающей сети при условии, если кинетической энергии электродвигателя будет достаточно для подпитки конденсаторных батарей силовых ячеек. Так для насосов допустимо полное пропадание напряжения длительностью в несколько сотен миллисекунд, для вентиляторов, турбокомпрессоров с большим моментом инерции время работы «режим поддержания постоянного напряжения» может исчисляться минутами.
Настоящее изобретение, решает поставленную задачу путем реализации повышения надежности и точности регулирования напряжения ЧРП в «режиме поддержания постоянного напряжения» за счет использования кинетической энергии электродвигателя, при этом снижая частоту выходного напряжения многоуровневого инвертора 2 ЧРП. При этом непрерывно контролируют величину питающего напряжения электропривода и регулируют напряжение «Ud» звена постоянного тока электропривода ЧРП, а также величину полного тока «Iп» электродвигателя.
Согласно заявляемого варианта реализации изобретения, система и устройство поддержания постоянного напряжения за счет использования кинетической энергии электродвигателя, может быть выполнена по схеме, изображенной на фиг.4.
Схема (фиг.4) включает: питающий силовой трансформатор 1; трёхфазные диодные выпрямители 9; конденсаторы звена постоянного тока 10; однофазные мостовые IGBT инверторы 11; электродвигатель 12; датчик питающего напряжения 13; датчики напряжения конденсаторов звена постоянного тока 14; датчики фазных токов электродвигателя 15; регулятор 16 напряжения «Ud» звена постоянного тока; регулятор 17 полного тока «Iп»; блок 18 формирования задания выходного напряжения «Um».
Заявляемый способ согласно изобретению, может быть реализован на основе программно-аппаратного комплекса ЧРП в соответствии со схемой (фиг.4). Посредством системы управления ЧРП, снимают показания с датчиков 13; 14; 15, непрерывно контролируют величину питающего напряжения «Uс» электропривода, а также напряжение «Ud» конденсаторов звена постоянного тока и значения полного тока «Iп» электродвигателя. Согласно полученных значений из набора датчиков 13; 14; 15, регулируют напряжение «Ud» звена постоянного тока электропривода и величину полного тока «Iп» электродвигателя 12.
В ходе регулирования, в режиме «Поддержания постоянного напряжения» используют, по меньшей мере, ПИ регулятор 16 напряжения «Ud» звена постоянного тока и ПИ регулятор 17 полного тока «Iп» электродвигателя.
Посредством ПИ регулятора напряжения «Ud» регулируют выходную частоту «f» многоуровневого инвертора звена постоянного тока, тем самым регулируя напряжение звена постоянного тока, причём, для увеличения напряжения «Ud» снижают выходную частоту ЧРП (f-Df).
Посредством ПИ регулятора полного тока электродвигателя, поддерживают намагниченное состояние электродвигателя, контролируя величину амплитуды задания выходного напряжения Um. В этом режиме активный ток электродвигателя мал и реактивный ток намагничивания практически равен полному току «Iп». Например, в блоке 18, увеличивают значение полного тока «Iп», путем увеличения амплитуды выходного напряжения Um.
Um = (Um+DUm)
Контроль параметров постоянного тока «Iп» электродвигателя позволяет обеспечить наличие тока возбуждения обмотки электродвигателя и осуществить быстрое включение в работу электропривода по завершению просадки питающего напряжения
Также регулируют и выравнивают напряжения «Ud» звеньев постоянного тока фаз многоуровневого инвертора ЧРП, контролируя задание амплитуды напряжения «Um» в каждой фазе. Например, для уменьшения напряжения звена постоянного тока «Ud» одной фазы увеличивают задание амплитуды напряжения «Um», этой фазы и уменьшают задание амплитуды напряжения «Um» других фаз.
Реализация заявляемого изобретения способствует достижению указанного технического результата.
Изобретение относится к области электротехники, в частности к системам и способам повышения надёжности работы электропривода с многоуровневым инвертором, основанным на обратном преобразовании кинетической энергии электродвигателя нагрузки в электрическую энергию путем снижения частоты на выходе электропривода. Технической задачей, на решение которой направлено изобретение, является повышение надежности и точности регулирования системы, включающей частотно регулируемый электропривод с электродвигателем, при просадках питающего напряжения. Сущность заявленного изобретения заключается в том, что при пропадании питающего напряжения электропривод переводят в режим поддержания постоянного напряжения звена постоянного тока. При этом непрерывно контролируют величину питающего напряжения электропривода, согласно которой регулируют напряжение Ud звена постоянного тока электропривода и величину полного тока Iп электродвигателя. 4 з.п. ф-лы, 4ил.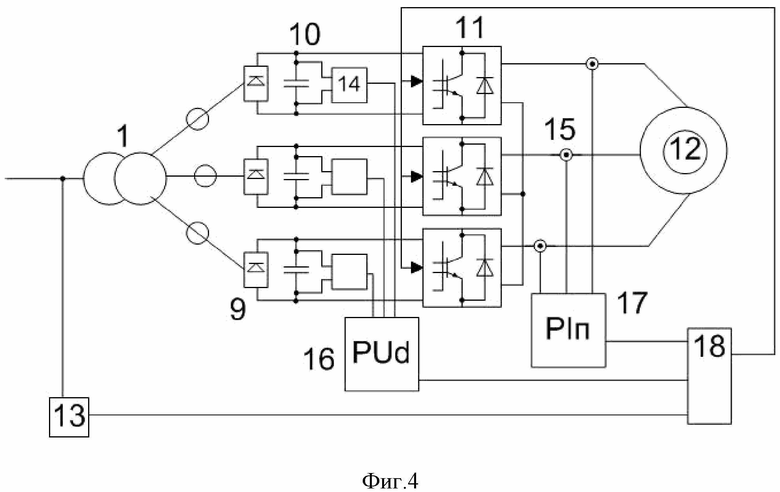
1. Способ повышения надёжности работы электропривода с многоуровневым инвертором, согласно которому при пропадании питающего напряжения электропривод переводят в режим поддержания постоянного напряжения в звене постоянного тока за счет использования кинетической энергии электродвигателя, при этом снижают частоту выходного напряжения многоуровневого инвертора, отличающийся тем, что непрерывно контролируют величину питающего напряжения электропривода, согласно которой регулируют напряжение звена постоянного тока (Ud) электропривода и величину полного тока (Iп) электродвигателя.
2. Способ по п.1, отличающийся тем, что в режиме поддержания постоянного напряжения используют, по меньшей мере, ПИ регулятор напряжения звена постоянного тока (Ud) и ПИ регулятор полного тока (Iп) электродвигателя.
3. Способ по п.1, отличающийся тем, что регулируют выходную частоту (f) многоуровневого инвертора посредством ПИ регулятора напряжения звена постоянного тока (Ud), регулируя напряжение звена постоянного тока, причём для увеличения напряжения Ud снижают выходную частоту (f).
4. Способ по п.1, отличающийся тем, что управляют величиной полного тока (Iп) посредством ПИ регулятора полного тока электродвигателя, контролируя величину амплитуды задания выходного напряжения (Um).
5. Способ по п.1, отличающийся тем, что регулируют и выравнивают напряжения (Ud) звеньев постоянного тока фаз многоуровневого инвертора, контролируя задание амплитуды напряжения (Um) в каждой фазе.
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2334338C1 |
| Нейтральный светофильтр | 1942 |
|
SU66625A1 |
| US 9543748 B2, 10.01.2017 | |||
| US 4379325 A, 01.08.1980. | |||

