Изобретение относится к области применения электротехники и электроники в судостроении и может быть использовано в системах размагничивания кораблей.
Система размагничивания включает в себя несколько обмоток размагничивания (электромагнитных компенсаторов), расположенных на корабле, для создания в вертикальном, продольном и горизонтальном направлениях магнитной силы, компенсирующей магнитное поле корабля, блок управления, который, получая сигналы о положении корабля, рассчитывает величину и направление компенсирующих токов в обмотках, и источники питания, которые по сигналам блока управления устанавливают в обмотках расчетные значения токов.
Для эффективного функционирования системы размагничивания источник питания должен устанавливать в обмотках расчетные значения тока с высокой точностью. Кроме того источник питания должен безотказно работать в течение всего времени автономного плавания корабля (обычно несколько тысяч часов) и обеспечивать режим работы без постоянного присутствия обслуживающего персонала.
Известен источник питания, реализованный в виде фазосдвигающего ШИМ-конвертера, построенного на основе фазосдвигающего резонансного контроллера UC3875 (отечественный аналог 1308ЕУ2Т), который описан в справочнике «Микросхемы для импульсных источников питания и их применение». М.: издательский дом «Додэка XXI», 2001, с. 248. Конвертер, построенный по указанной схеме, обеспечивает управляемый источник питания мощностью до десятков кВт.
Недостатком данного аналога является его однополярность, что исключает его применение для питания обмоток размагничивания.
Известен источник питания электромагнитных компенсаторов по патенту РФ № 2414740, опубл. 20.03.2011 г., который содержит датчик напряжения выпрямителя сети, источник задающего воздействия, первый и второй сумматоры, фазосдвигающий ШИМ-конвертер, фильтр верхних частот, выпрямитель конвертера, компаратор, датчик пульсаций выходного напряжения, инвертор, формирователь сигнала инвертора, датчик тока инвертора ДТИ, детектор выходного тока и нагрузку. Соединение перечисленных элементов устройства формирует две петли обратной связи: одну по току, вторую по напряжению.
Недостатком данного устройства является то, что источник питания может устойчиво работать на конкретную обмотку лишь при индивидуальной настройке на нее двух петель обратной связи.
Наиболее близким по технической сущности к настоящему изобретению является источник питания электромагнитных компенсаторов по патенту РФ № 2289192, опубл. 10.12.2006 г. Ближайший аналог содержит источник задающего воздействия, выход которого соединен с входом операционного усилителя с гальванической развязкой, выход которого соединен с входом компаратора, с первым входом аналогового коммутатора напрямую, а со вторым входом - через инвертирующий операционный усилитель. Прямой выход компаратора соединен с входами управления коммутатора и инвертора, а инверсный выход - со вторым входом управления инвертора, выход коммутатора соединен с инверсным входом измерительного операционного усилителя, прямой вход которого соединен с выходом суммирующего операционного усилителя, первый вход которого соединен с выходом источника опорного напряжения конвертера, а второй - с выходом второго операционного усилителя с гальванической развязкой, входы которого соединены с выходами датчика тока. Выход измерительного операционного усилителя соединен с входом управления конвертера, в диагонали которого через последовательно соединенные разделительный конденсатор, накопительный дроссель включена первичная обмотка силового трансформатора, вторичная обмотка которого по пушпульной схеме через выпрямитель и датчик тока соединена с цепью питания инвертора. Выход инвертора является выходом устройства.
Согласно современным требованиям, источник питания должен устанавливать расчетное значение тока с высокой точностью в условиях широкого диапазона изменения рабочих температур и высокого уровня электромагнитных помех корабля. Использование в упомянутом аналоге для управления током аналоговых сигналов не позволяет обеспечить их соответствие современным требованиям по точности. Кроме того аналог не обеспечивает возможности управления и контроля работоспособности источника питания в режиме эксплуатации без постоянного присутствия обслуживающего персонала.
Помимо прочего источник питания должен безотказно функционировать в течение всего времени автономного плавания корабля, что возможно только при наличии разветвленной системы контроля параметров, диагностики и поиска неисправностей, которой аналог не обладает.
В связи с указанными выше обстоятельствами потребовалось решение технической проблемы, которая при создании данного изобретения заключалась в расширении арсенала технических средств для питания обмоток размагничивания, отвечающих современным требованиям по обеспечению точности поддержания расчетного значения тока, возможности контроля работоспособности источника питания в режиме эксплуатации без постоянного присутствия обслуживающего персонала и обеспечению безотказного функционирования источника питания в течение всего времени автономного плавания корабля.
Технический результат изобретения заключается в расширении арсенала технических средств для питания обмоток размагничивания корабля, а также в том, что использование заявленного источника питания током обмоток размагничивания позволяет повысить точность задания источнику питания расчетного значения компенсирующего тока, обеспечить возможность работы устройства без постоянного присутствия обслуживающего персонала и повысить надежность источника питания.
Указанный технический результат достигается тем, что источник питания током обмоток размагничивания, содержащий, в соответствии с ближайшим аналогом, последовательно соединенные ШИМ-конвертер, выпрямитель и инвертор, дополнительно снабжен контроллером, первый вход-выход которого соединен с входом-выходом блока управления системы размагничивания, первый выход подключен к прямому (управляющему) входу ШИМ-конвертера, а второй выход к управляющему входу инвертора, блоком управления и сигнализации, выполненным на основе микропроцессора, вход-выход которого подключен ко второму входу-выходу контроллера, датчиком выходного напряжения, входы которого «+» и «-» подключены соответственно к прямому и инверсному выходам инвертора, а выход соединен со вторым входом контроллера, датчиком температуры, установленным на радиаторе охлаждения ШИМ-конвертера, выход которого соединен с третьим входом контроллера, и датчиком выходного тока, подключенным входами «+» и «-» соответственно к прямому выходу инвертора и первому вводу обмотки, второй ввод которой соединен с инверсным выходом инвертора, причем выход датчика выходного тока соединен с первым входом контроллера и входом детектора датчика выходного тока, выход которого соединен с инверсным входом ШИМ-конвертера.
Заявленное устройство поясняется чертежами, на которых показаны:
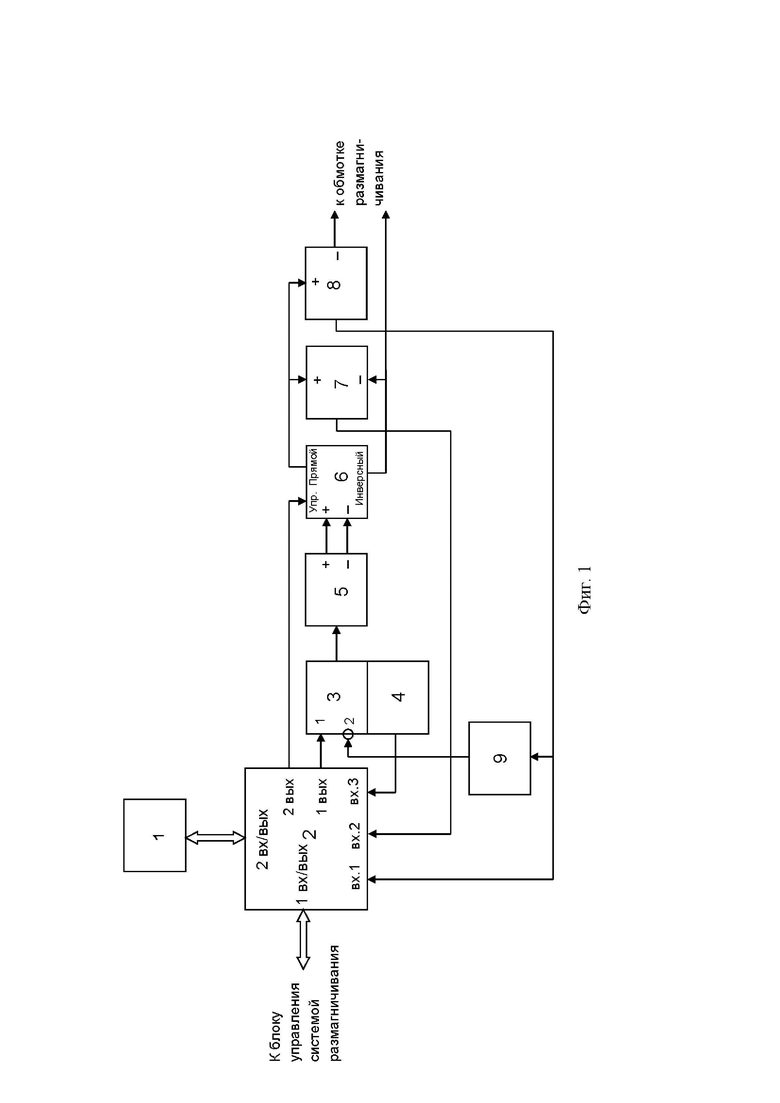
на фиг.1 - структурная схема источника питания током обмоток размагничивания;
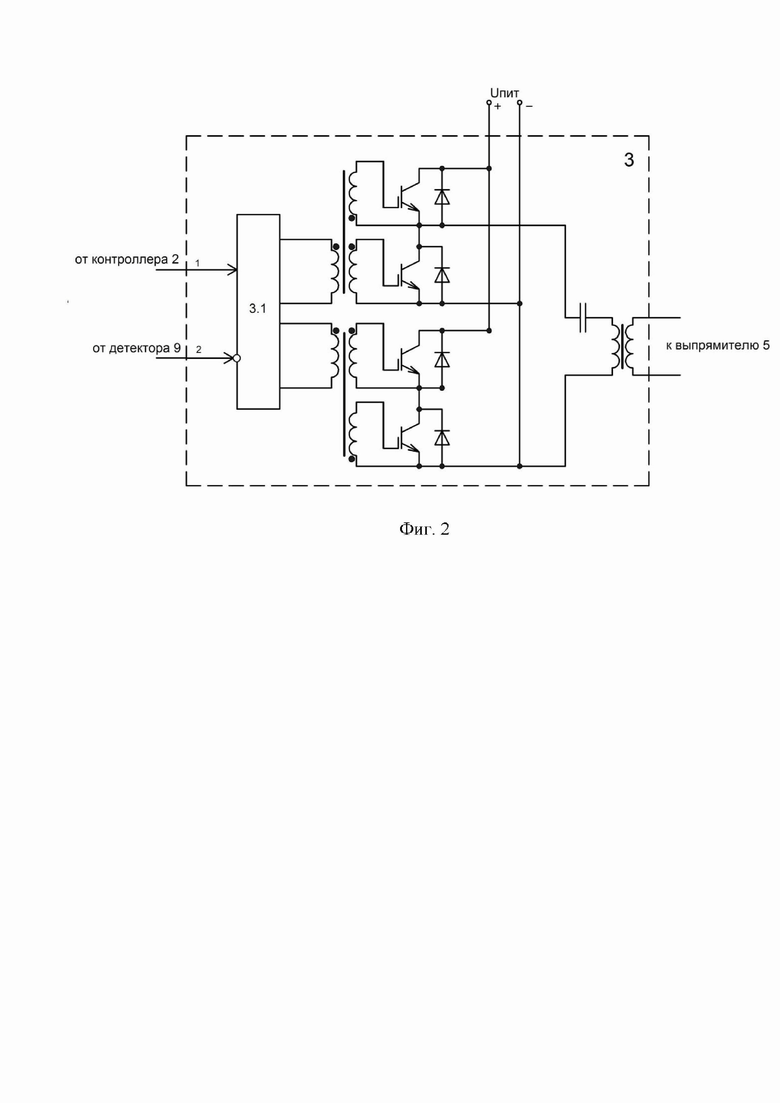
на фиг. 2 - схема ШИМ-конвертера;
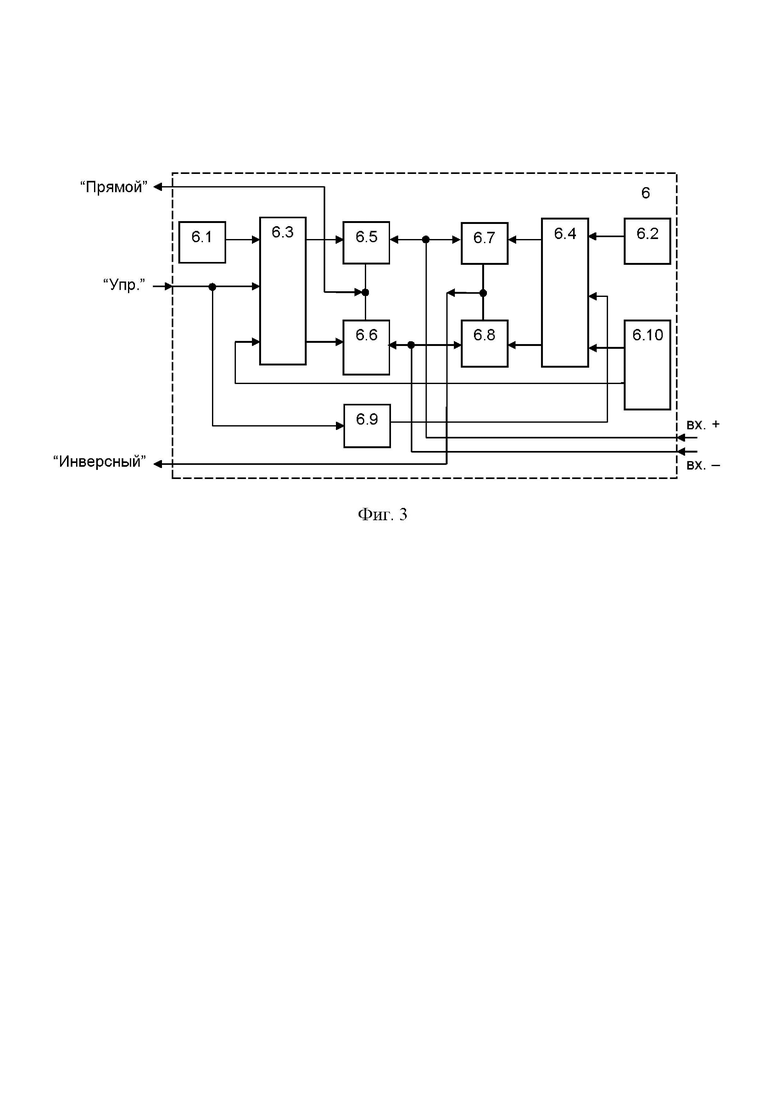
на фиг. 3 - структурная схема инвертора.
Источник питания током обмоток размагничивания, показанный на фиг. 1, содержит блок управления и индикации 1, контроллер 2, ШИМ-конвертер 3, датчик температуры 4, выпрямитель 5, инвертор 6, датчик выходного напряжения 7, датчик выходного тока 8 и детектор датчика выходного тока 9.
Первый выход контроллера 2 соединен с прямым, управляющим, входом 1 ШИМ-конвертера 3, второй выход соединен с управляющим входом инвертора 6, первый вход-выход соединен с входом-выходом внешнего блока управления системой размагничивания, а второй вход-выход соединен с входом-выходом блока управления и индикации 1. Первый вход контроллера 2 соединен с выходом датчика выходного тока 8, второй вход соединен с выходом датчика выходного напряжения 7, а третий вход соединен с выходом датчика температуры 4, установленного на радиаторе охлаждения ШИМ-конвертера 3. Инверсный вход 2 ШИМ-конвертера 3 соединен с выходом детектора датчика выходного тока 9, вход которого подключен к выходу датчика выходного тока 8, выход ШИМ-конвертера 3 подключен ко входу выпрямителя 5, выходы которого “+” и “-” соединены соответственно со входами “+” и “-” инвертора 6. Прямой выход инвертора 6 соединен с входом “+” датчика выходного напряжения 7 и входом “+” датчика выходного тока 8, а инверсный выход соединен со входом “-” датчика выходного напряжения 7. Обмотка размагничивания подключена ко входу “-” датчика выходного тока 8 и к инверсному выходу инвертора 6.
Блок управления и индикации 1 предназначен для местного, с лицевой панели, управления током в обмотке и поиска неисправности при отказе источника питания. Блок оснащен цифровыми индикаторами и элементами управления, обеспечивающими установку требуемого значения и направления тока, а также вывод текстовых сообщений для диагностики неисправностей. Блок управления и индикации может быть реализован на базе 32-разрядного микроконтроллера 1986ВЕ92У.
Контроллер 2 предназначен для повышения точности поддержания источником питания расчетного значения тока в обмотке и обеспечения эксплуатации устройства в режиме работы без постоянного присутствия обслуживающего персонала. Контроллер может быть реализован на базе микроконтроллера 1986ВЕ91Т.
ШИМ-конвертер 3 предназначен для управления величиной тока в обмотке размагничивания в соответствии с изменением величины напряжения на его управляющем входе. На фиг.2 приведена схема ШИМ-конвертера 3, который содержит ШИМ-контроллер 3.1, первый вход которого является прямым управляющим входом ШИМ-конвертера 3, на который с первого выхода контроллера 2 подается в аналоговом виде сигнал величины модуля расчетного тока. Ко второму инверсному входу ШИМ-контроллера 3.1 с выхода детектора датчика выходного тока 9 подается модуль действующего в обмотке тока. Выходы ШИМ-контроллера 3.1 нагружены первичными обмотками двух трансформаторов, к вторичным обмоткам которых подключены транзисторы мостового каскада, которые попарно открываясь, обеспечивают протекание переменного тока, создаваемого постоянным напряжением Uпит, через разделительный конденсатор и первичную обмотку выходного трансформатора, вторичная обмотка которого подключена к выпрямителю 5. Постоянное напряжение Uпит получают путем преобразования переменного трехфазного напряжения 380 В бортовой сети корабля с помощью выпрямителя и фильтра (на чертежах не показаны). В качестве ШИМ-контроллера может быть использован мостовой резонансный контроллер фазового сдвига 1308ЕУ2Т (иностранный аналог UC3875). Работа ШИМ-конвертеров на базе UC3875 подробно описана в справочнике «Микросхемы для импульсных источников питания и их применение». - М.: издательский дом «Додэка XXI», 2001, с. 248.
Датчик температуры 4 обеспечивает измерение температуры радиатора охлаждения ШИМ-конвертера. В этом качестве может быть применен, например, датчик температуры ТМБА 1.6.
Выпрямитель 5 предназначен для преобразования выходного переменного напряжения ШИМ-конвертера в постоянное, необходимое для питания током обмоток размагничивания, и может быть реализован на базе диодов МД4-100-6-А6 или их аналогов.
Инвертор 6 обеспечивает соответствие направления тока в обмотке сигналам, поступающим со второго выхода контроллера 2 на его управляющий вход, и может быть реализован по схеме, приведенной на фиг. 3. Инвертор, показанный на фиг. 3, содержит первый и второй источники питания затворов транзисторов верхних плеч полумостов 6.1 и 6.2, первый и второй драйверы полумостов 6.3 и 6.4, первый, второй, третий и четвертый транзисторы моста 6.5, 6.6, 6.7, 6.8, логический инвертор 6.9 и третий источник питания драйверов транзисторов нижних плеч полумостов 6.10. Диагональ моста, образованная попарно соединенными входами транзисторов 6.5, 6.7 и 6.6, 6.8, подключена соответственно через входы “+” и “-” к выходам “+” и “-” выпрямителя 5, а диагональ моста, образованная попарно соединенными выходами транзисторов 6.5, 6.6 и 6.7, 6.8, подключена соответственно через прямой и инверсный выходы к обмотке размагничивания. Изменение направления тока в обмотке производится включением транзисторов противоположных плеч моста 6.5 и 6.6 для одного направления и 6.7, 6.8 для противоположного. На управляющий вход инвертора 6 от второго выхода контроллера 2 поступает сигнал в виде логического 0 и логической 1, которые проходят на вход драйвера 6.3 непосредственно, а на вход драйвера 6.4 через логический инвертор 6.9. Драйвер полумоста при логической 1 на входе включает транзистор верхнего плеча полумоста, а при логическом 0 нижнего. Таким образом при сигнале логическая 1 на входе инвертора включаются транзисторы 6.5, 6.8 и прямой выход соединяется с “+” входа инвертора, а инверсный выход с “-”. При сигнале логический 0 на входе инвертора включаются транзисторы 6.7, 6.8 и прямой выход соединяется с входом “-”, инверсный выход с входом “+”, а ток в обмотке изменяет направление на противоположное.
Датчик выходного напряжения 7 предназначен для контроля напряжения на выходе источника питания. В качестве такого датчика может быть использован датчик малых токов типа ДМТ-10, входы которого через резистор подключены к выходам инвертора. Номинал резистора выбирается, исходя из допустимого максимального значения измеряемого тока датчиком ДМТ-10 при максимальном значении выходного напряжения источника питания. В результате выходной сигнал датчика малых токов ДМТ-10 будет соответствовать выходному напряжению инвертора.
Датчик выходного тока 8 предназначен для контроля тока в обмотке. В качестве такого датчика может быть использован датчик измерения тока ДТХ-Т с нагрузочным резистором, имеющим соответствующий диапазону измеряемых токов номинал.
Детектор датчика выходного тока 9 предназначен для получения модуля действующего в обмотке тока. В этом качестве может быть применен активный двухполупериодный выпрямитель на базе операционного усилителя типа 544УД12, выходное напряжение которого равно модулю входного.
Заявленный источник питания током обмоток размагничивания работает следующим образом.
Источник питания может работать в двух режимах управления выходным током: дистанционном, при задании расчетной величины и направления тока блоком управления системой размагничивания и местном, при задании оператором величины и направления тока органами управления блока управления и индикации 1. Дистанционный режим является приоритетным и включается автоматически при подаче питающего напряжения, местный режим включается оператором через органы управления блока управления и индикации 1.
При дистанционном управлении с входа-выхода блока управления системой размагничивания на первый вход-выход контроллера 2 поступает в цифровом виде расчетное значение величины и направления тока в обмотке размагничивания и заносится в его оперативную память. Контроллер 2 через цифро-аналоговый выход 1 подает на управляющий вход 1 ШИМ-конвертера 3 сигнал, пропорциональный модулю расчетного значения компенсирующего тока. Через дискретный выход 2 контроллер 2 подает на управляющий вход инвертора 6 сигнал логического 0 или логической 1, определяющий соответственно включение пары транзисторов 6.5, 6.8 или 6.6, 6.7 инвертора 6 и, тем самым, направление тока в обмотке. Сигнал отрицательной обратной связи с выхода датчика выходного тока 8 через детектор датчика выходного тока 9, который вырабатывает сигнал, пропорциональный модулю величины выходного тока, попадает на инверсный вход ШИМ-конвертера. ШИМ-контроллер будет увеличивать или уменьшать выходной ток до момента совпадения величин на прямом и инверсном входах ШИМ-конвертера. Таким образом, устанавливается расчетное значение по величине и направлению тока в обмотке.
Выходной сигнал датчика выходного тока 8, пропорциональный величине и направлению тока в обмотке размагничивания, поступает на аналого-цифровой вход 1 контроллера 2, где преобразуется в цифровой код и сравнивается с занесенным в оперативную память расчетным значением компенсирующего тока, полученным от блока управления системой размагничивания. При несовпадении модулей величины тока формируется аварийный сигнал и передается код ошибки по 1 и 2 входу-выходу контроллера 2 об отказе ШИМ-конвертера 3, при несовпадении направления тока формируется сигнал об отказе инвертора 6.
Выходной сигнал датчика выходного напряжения 7, пропорциональный величине напряжения на обмотке размагничивания, поступает на аналого-цифровой вход 2 контроллера 2, где преобразуется в цифровой код, и контроллер, производя деление напряжения на ток, определяет величину сопротивления обмотки.
Таким образом может определяться обрыв обмотки, короткое замыкание обмотки и несоответствие обмотки требованиям источника питания при коротком замыкании части витков обмотки. Во всех случаях происходит снятие сигнала управления током источника питания и формирование соответствующего кода отказа, передаваемого по 1 и 2 входу-выходу контроллера 2.
Выходной сигнал датчика температуры 4, пропорциональный температуре радиатора ШИМ-конвертера, поступает на аналого-цифровой вход 3 контроллера 2, преобразуется в цифровой код и сравнивается контроллером с величиной предельной и аварийной температуры радиатора, занесенной в память контроллера 2. При превышении предельной температуры формируется код отказа, свидетельствующий об отказе системы охлаждения источника питания. При превышении аварийной температуры контроллер 2 снимает сигнал управления током с входа ШИМ-конвертера 3.
Таким образом, предлагаемый источник питания током обмоток размагничивания расширяет арсенал имеющихся средств для питания обмоток размагничивания, позволяет повысить точность задания расчетного значения компенсирующего тока за счет передачи сигналов не в аналоговом, а цифровом виде, что повышает точность приема источником питания этой величины в условиях широкого диапазона рабочих температур и высокого уровня электромагнитных помех при эксплуатации на корабле; обеспечивает возможность работы устройства без постоянного присутствия обслуживающего персонала у источника питания, за счет передачи значений величины и направления выходного тока, величины выходного напряжения и температуры в блок управления системой размагничивания в цифровом виде для дистанционного контроля оператором процесса размагничивания, а также позволяет повысить надежность за счет подключения к контроллеру блока управления и индикации, который дает возможность местного управления, контроля параметров источника питания и ввода команд при оперативном устранении отказов устройства. Таким образом, при использовании заявленного устройства достигается сформулированный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2005 |
|
RU2289192C1 |
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2010 |
|
RU2414740C1 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ СТАНЦИЙ БЕЗОБМОТОЧНОГО РАЗМАГНИЧИВАНИЯ КОРАБЛЕЙ | 2014 |
|
RU2552625C1 |
| Стабилизированный источник питания | 1986 |
|
SU1390736A1 |
| Ключевой стабилизированный конвертер | 2023 |
|
RU2810649C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2009 |
|
RU2415508C1 |
| СТАБИЛИЗИРОВАННЫЙ КВАЗИРЕЗОНАНСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2417510C1 |
| Устройство для управления грузоподъемным электромагнитом | 1990 |
|
SU1817144A1 |
| СТАБИЛИЗИРОВАННЫЙ КВАЗИРЕЗОНАНСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2385526C1 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ СТАНЦИЙ БЕЗОБМОТОЧНОГО РАЗМАГНИЧИВАНИЯ КОРАБЛЕЙ | 2017 |
|
RU2669761C1 |
Изобретение относится к области применения электротехники и электроники в судостроении и может быть использовано в системах размагничивания кораблей. Заявленный источник питания обмоток размагничивания, содержащий последовательно соединенные ШИМ-конвертер, выпрямитель и инвертор, а также датчики выходного тока, выходного напряжения и температуры радиатора охлаждения, и детектор выходного тока, снабжен контроллером, соединение которого с блоком управления системой размагничивания образует помехозащищенный цифровой канал дистанционного управления источником питания и контроля параметров, собираемых датчиками, и блоком управления и сигнализации на базе микропроцессора, соединение которого с контроллером образует цифровой канал местного управления для оперативного поиска причин отказов и их устранения. Технический результат изобретения заключается в расширении арсенала технических средств для питания обмоток размагничивания, а также в том, что использование заявленного устройства позволяет повысить точность задания источнику питания расчетного значения компенсирующего тока, обеспечить возможность работы устройства без постоянного присутствия обслуживающего персонала и повысить надежность источника питания. 3 ил.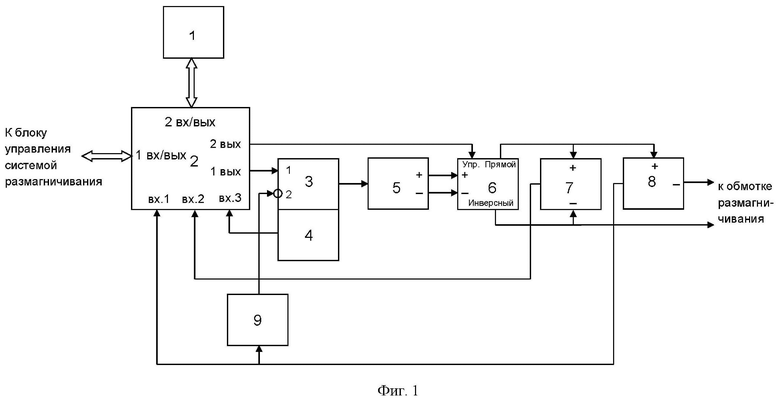
Источник питания током обмоток размагничивания, содержащий последовательно соединенные ШИМ-конвертер, выпрямитель и инвертор, отличающийся тем, что он снабжен контроллером, первый вход-выход которого подключен к входу-выходу блока управления системы размагничивания, первый выход подключен к прямому, управляющему, входу ШИМ-конвертера, а второй выход к управляющему входу инвертора, блоком управления и индикации, вход-выход которого подключен ко второму входу-выходу контроллера, датчиком выходного напряжения, подключенным входами “+” и “-” соответственно к прямому и инверсному выходам инвертора, а выходом ко второму входу контроллера, датчиком температуры, установленным на радиаторе охлаждения ШИМ-конвертера, выход которого подключен к третьему входу контроллера, и датчиком выходного тока, подключенным входами “+” и “-” соответственно к прямому выходу инвертора и первому вводу обмотки размагничивания, второй ввод которой соединен с инверсным выходом инвертора, причем выход датчика выходного тока подключен к первому входу контроллера и входу детектора датчика выходного тока, выход которого соединен с инверсным входом ШИМ-конвертера.
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2010 |
|
RU2414740C1 |
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2005 |
|
RU2289192C1 |
| DE 3936985 A1, 08.05.1991 | |||
| US 5845141 A1, 01.12.1998 | |||
| СПОСОБ РАЗМАГНИЧИВАНИЯ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2095277C1 |
