Изобретение относится к автоматическому прецизионному устройству отбора, с промывкой пипетки, причем указанное устройство обеспечивает возможность восстановления реагентов и его можно использовать в роботе-анализаторе.
Изобретение в частности относится к устройству этого типа, имеющего модульную конструкцию, благодаря которой его можно легко адаптировать к нужной степени точности и к техническим условиям как в отношении количества продукта, отбираемого пипеткой, так и в отношении количества промывочной жидкости.
Существует много видов устройств, выполняющих циклы отбора и промывки, в частности в автоматических анализаторах.
Обычно эти устройства имеют по меньшей мере два электропривода, из которых один используется для приведения в действие дозирующего шприца, другой - для работы насоса для впрыскивания промывочной жидкости. Дозирующий шприц, предусматриваемый для небольших количеств жидкости, не имеет достаточной вместимости для выполнения промывки.
Это техническое решение является относительно сложным и дорогостоящим. В нем предусматривается насос, обеспечение которого электроприводом является дорогостоящим с точки зрения энергии; и его прочность и срок службы ниже и короче, чем у шприца. Поэтому уровень надежности этого устройства неприемлемый. В настоящее время требуется, чтобы этот тип устройства мог бы работать безотказно в течение по меньшей мере семи лет в цикле робота, в составе которого оно применяется. В случае такого робота, который описывается в патенте Франции 2779827, частота цикла составляет 60 анализов/час в течение по меньшей мере двух часов в сутки, 220 дней в год (т.е. около 185000 анализов).
В настоящее время отмечается, что более всего изнашивается механизм приведения в действие шприца, в результате чего с течением времени люфт увеличивается. Это происходит, в частности, когда этот механизм имеет электродвигатель с приводом заднего хода, связанный со штоком шприца с помощью устройства, преобразующего вращательное движение электродвигателя в линейное перемещение указанного штока. Поэтому люфт возникает из-за износа зубцов шестерен и/или зубчатых реек, используемых и в электродвигателе с приводом заднего хода, и в устройстве преобразования движения.
Разумеется, этот люфт сказывается на точности устройства отбора; причем люфт дает запаздывание и тем самым ограничивает ход штока шприца в его двух оконечных пределах. Этот люфт в большей степени проявляется при каждом обращении вращения электродвигателя. Это обстоятельство гораздо в большей степени отрицательно сказывается на точности устройства, когда цифровые данные о количествах отбираемой пипеткой жидкости предоставляются цифровым кодером электродвигателя, и это приводит к тому, что механический люфт обусловливает разность между объемом, определенным по данным кодера, и объемом жидкости, фактически забранной или введенной обратно пипеткой.
Для осуществления устройства отбора, надежность и срок службы которого будут теми же, что и у шприца отбора, заявитель осуществил устройство отбора, содержащее по меньшей мере два насосных устройства, каждое из которых имеет цилиндрическую полость, внутри которой узел штока/поршня перемещается поступательно и с обеспечением герметичности; при этом указанный узел ограничивает полостью рабочую камеру, объем которой изменяется соответственно осевому положению узла штока/поршня.
Концевые части двух штоков/поршней, выходящих из полостей, связаны с исполнительным элементом, приводимым в поступательное перемещение обычным электроприводом.
Рабочая камера каждого насосного устройства при этом соединена с контуром, последовательно содержащим трубопровод, выходящий в резервуар промывочной жидкости, два последовательных электроклапана и трубку, предпочтительно гибкую, соединенную с таким средством отбора как игла.
Более крупная рабочая камера соединена с той частью контура, которая обеспечивает место соединения между двумя электроклапанами; при этом другая рабочая камера соединена с той частью контура, которая расположена между вторым электроклапаном и средством отбора.
Это устройство также включает в себя средство регулирования электропривода и электроклапанов, выполненных с возможностью обеспечения цикла, по меньшей мере состоящего из:
- фазы отбора, в которой первый электроклапан открыт, второй электроклапан закрыт, и электропривод приводит в поступательное перемещение два узла штока/поршня, чтобы увеличивать объем двух рабочих камер; при увеличении объема меньшей камеры происходит всасывание анализируемой жидкости или всасывание реагента в устройство отбора; при этом увеличение объема большей камеры обусловливает всасывание промывочной жидкости внутрь этой камеры;
- фазы выпуска, в которой два электроклапана находятся в том же положении, что и во время фазы отбора, и действие электропривода при этом уменьшает объемы указанных рабочих камер и обусловливает выпуск реагента или анализируемой жидкости;
- промывочной фазы, в которой первый электроклапан закрыт и второй электроклапан открыт, и действие электропривода при этом поступательно перемещает два узла штока/поршня и уменьшает объем двух рабочих камер, выталкивая из себя промывочную жидкость в средство отбора.
Чтобы устранить недостатки, связанные с механическим люфтом, изобретение обеспечивает дополнительный электроклапан, установленный в контуре, соединяющем второе насосное устройство с пипеткой, и этот электроклапан открывается только для выполнения фазы взятия пробы и/или фазы выпуска, когда узлы штока/поршня в данное время перемещаются в том или ином направлении после обращения или пуска переходных фаз и/или прекращения переходных фаз.
За счет этого расположения взаимозацепляющие зубцы шестерен и зубчатых реек кинематической цепи прочно прилегают друг к другу, и поэтому механический люфт (если таковой имеется) в этих фазах не появляется.
Разумеется, устройство согласно настоящему изобретению может содержать некоторое число n насосных устройств, в которых узлы штока/поршня соединены с данным исполнительным элементом и рабочие камеры которых соответственно соединены с контуром, содержащим число n электроклапанов, соединенных последовательно в той части контура, которая обеспечивает места соединения между электроклапанами, включающими в себя n-1 первых клапанов; при этом меньшая рабочая камера с n-го клапана соединена со средством отбора с помощью контура, содержащего n+1-й клапан. Указанное средство управления сконструировано таким образом, что в каждой из указанных фаз некоторое число i электроклапанов находится в закрытом состоянии, и при этом другие клапаны, т.е. клапаны числом n-1, находятся в открытом положении.
Устройство согласно настоящему изобретению предпочтительно содержит множество модулей, каждый из которых имеет одно насосное устройство указанного выше типа, рабочая камера которого соединена с частью контура, содержащего один электроклапан. Эта часть контура на каждом из своих концов имеет средство для соединения с контуром другого модуля и/или с отверстием трубопровода, выходящим в резервуар промывочной жидкости, и/или с трубкой, соединенной со средством отбора. Соединительное средство между электроприводом и узлами штока/поршня выполнены с возможностью соединения нужного числа модулей.
Осуществления настоящего изобретения описываются ниже и приводятся в качестве неограничивающих примеров, со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 изображает принципиальную схему устройства отбора, использующего два шприца, согласно изобретению;
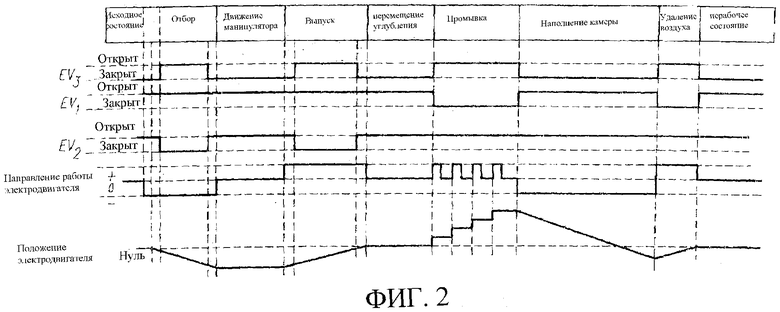
фиг. 2 - временную диаграмму полной рабочей последовательности устройства отбора, показываемого на фиг. 1;
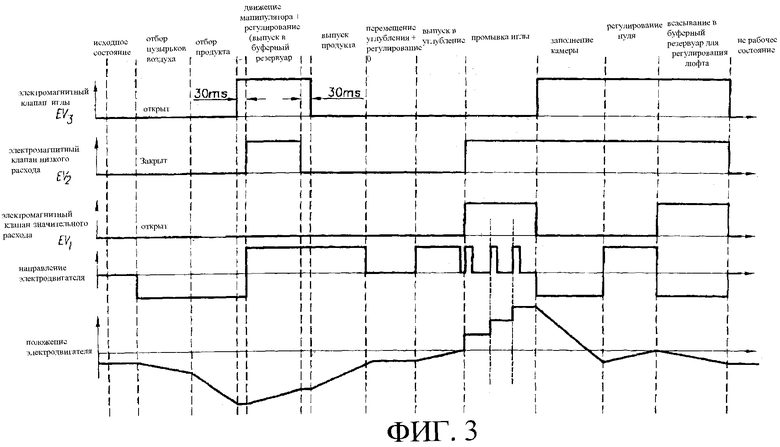
фиг. 3 - временную диаграмму упрощенной рабочей последовательности, варианта устройства отбора, показываемого на фиг. 1;
фиг. 4 - сечение устройства, показанного на фиг. 1;
фиг. 5 - устройство, показанное на фиг. 4 в перспективе, с пространственным разделением деталей;
фиг. 6 - устройство, показанное на фиг. 5, в перспективе в сборе;
фиг. 7 - сечение насосного устройства, применимого в устройстве отбора согласно изобретению;
Фиг. 8 - схему насосного устройства, показанного на фиг. 6.
В примере, изображаемом на фиг. 1, устройство отбора содержит два насосных устройства 1, 2, каждый из которых имеет цилиндрический корпус C, C', в котором перемещается поршень Р, Р', при этом указанный корпус ограничен дном F, F' рабочей камеры с изменяемым объемом.
Поршень выполнен заодно со штоком Т, Т', выходящим из корпуса на противоположной стороне дна F, при этом указанный шток соединен с исполнительным механизмом поступательного перемещения, имеющим:
- соединительный элемент АС, к которому прикреплены штоки Т и Т' (между Т, Т' и АС имеется зазор для уменьшения дефектов параллелизма),
- зубчатую рейку CR, выполненную заодно с соединительным элементом АС, который проходит параллельно оси цилиндрических корпусов С, С'.
- шестерню PN, которая приводится в действие шаговым электродвигателем МР и зацепляется с зубчатой рейкой CR.
Дно каждого из корпусов С, С' имеет трубопровод СО, СО', посредством которого рабочая камера сообщается с контуром, последовательно содержащим: трубопровод СР1, выходящий в резервуар RL промывочной жидкости, три последовательных электроклапана EV1, EV2, и EV3, и гибкую трубку TS, соединяющую электроклапан EV3 с подвижной иглой АР отбора.
Эта игла АР вводится в различные гнезда, например, в резервуар RE, содержащий пробу или реагент, гнездо RA анализа или промывочное углубление PR.
В частности, трубопровод СО соединен с контуром, соединяющим электроклапаны EV1, EV2. Трубопровод СО' выходит в ту часть контура, которая обеспечивает связь между электроклапаном EV2 и электроклапаном EV3.
Управление электроклапанами EV1, EV2, EV3 и электродвигателем МР осуществляет микроконтроллер МС, оптический датчик, обеспечивающий «нулевое» положение системы.
Функционирование упоминаемого выше устройства отбора описывается ниже со ссылкой на временную диаграмму фиг. 2.
Согласно этой временной диаграмме: в исходном состоянии игла АР находится внутри резервуара RE, клапаны EV1, EV2 находятся в открытом положении, и клапан EV3 закрыт. Электродвигатель МР остановлен, поршни находятся в нерабочем положении (положение 0). Две рабочие камеры насосных устройств 1, 2 заполнены промывочной жидкостью.
Во время переходной фазы, предшествующей отбору, электродвигатель МР работает в обратном направлении и перемещает два поршня Р, Р' вниз. Это перемещение создает всасывание промывочной жидкости в две рабочие камеры. Возникновение присутствующего в кинематической цепи люфта (в результате которого происходит небольшое смещение при всасывании) не влияет на функционирование устройства.
Фаза отбора затем осуществляется закрытием клапана EV2 и открытием клапана EV3. В этом случае поршень Р' создает всасывание жидкости, содержащейся в резервуаре RE, внутри иглы АР и в части гибкой трубки ТС; при этом поршень Р всасывает промывочную жидкость, содержащуюся в резервуаре RL.
В конце отбора устройство перемещается через вторую переходную фазу, обозначаемую закрытием клапана EV3 и открытием клапана EV2, и при этом отбор заканчивается, причем электродвигатель, продолжающий работать, обусловливает всасывание двумя камерами промывочной жидкости, отбираемой из гнезда RL.
В конце второй переходной фазы электродвигатель МР останавливается и игла АР перемещается, занимая, например, положение над гнездом RA анализа.
По достижении этого положения устройство начинает третью переходную фазу, в которой электродвигатель МР работает в противоположном направлении (вперед) и при этом перемещает поршни Р, Р' в их нерабочее положение (положение 0). Во время этой переходной фазы клапан EV3 остается закрытым, и клапаны EV1 и EV2 открыты, позволяя тем самым выпуск промывочной жидкости в гнездо RL.
Затем фаза выпуска начинается открытием клапана EV3 и закрытием клапана EV2, при этом клапан EV1 остается открытым. Во время этой фазы поршень Р' выталкивает обратно жидкость, ранее взятую иглой АР, внутрь гнезда RA, и при этом поршень Р выталкивает обратно промывочную жидкость внутрь гнезда RL.
Фаза выпуска заканчивается закрытием клапана EV3 и открытием клапана EV2; клапан EV1 остается открытым.
Электродвигатель продолжает работать во время четвертой переходной фазы и затем останавливается.
Затем устройство начинает фазу, во время которой игла АР перемещается вправо от промывочного углубления, чтобы обеспечивать возможность осуществления промывочной фазы.
В начале этой новой фазы клапан EV1 закрыт, при этом клапаны EV2 и EV3 открыты. Электродвигатель МР приводится в движение и выталкивает обратно промывочную жидкость, содержащуюся в двух шприцах, в направлении иглы отбора.
Фактически этот выпуск выполняется несколькими этапами, каждый из которых соответствует одному или нескольким шагам электродвигателя МР.
После выполнения промывочной фазы устройство начинает возвращение в нулевую фазу, наполняя камеры промывочной жидкостью. Для этого клапаны EV1 и EV2 открываются, и при этом клапан EV3 закрывается. Электродвигатель работает в обратном направлении, чтобы установить поршни в положение, немного превышающее нерабочее положение (положение 0), путем всасывания промывочной жидкости, взятой из гнезда RL.
Затем устройство переходит к фазе удаления воздуха из иглы АР открытием клапанов EV2 и EV3 и закрытием клапана EV1 и включением электродвигателя МР в работу в прямом направлении, чтобы произошел выпуск промывочной жидкости в иглу отбора АР и чтобы поршень и ТР2 заняли нерабочее положение.
По завершении этой фазы удаления воздуха устройство возвращается в свое нерабочее положение. Затем электроклапан EV3 закрывается, и при этом электроклапаны EV1 и EV2 открываются.
Теперь устройство готово к проведению нового рабочего цикла.
Согласно упрощенной последовательности, изображаемой на фиг. 3, в исходном положении клапаны EV1 и EV3 открыты, и клапан EV2 закрыт. Фактически это соответствует нерабочим (невозбужденным состояниям) положениям этих клапанов. Электродвигатель остановлен, и его угловое положение расположено несколько ниже его нулевого положения.
Из этого исходного положения электродвигатель включается в работу в обратном направлении, и при этом поршень Р' создает всасывание внутри пипетки (отбор воздушного пузырька), поршень Р создает всасывание промывочной жидкости в резервуаре RL.
Затем пипетка входит в резервуар реагента, и при этом работа электродвигателя в обратном направлении ускоряется. Затем происходит фаза отбора, продолжающаяся заданный период, в течение которого реагент всасывается в пипетку под действием поршня Р'. Эта фаза отбора завершается с остановкой электродвигателя, с закрытием клапана EV3 и открытием через 30 мсек после этого клапана EV2. Электродвигатель начинает переходную фазу для обращения направления вращения, которая длится относительно короткий период.
Промывочная жидкость, выталкиваемая поршнями, затем возвращается в резервуар RL.
После завершения регулировки люфта клапан EV2 закрывается и клапан EV3 открывается на 30 мсек позднее.
Пипетка затем смещается вправо от гнезда RA анализа. После достижения этого положения устройство начинает фазу выталкивания продукта в гнездо RA анализа, и при этом вращение электродвигателя ускоряется в прямом направлении. Эта фаза выпуска заканчивается остановкой электродвигателя.
Затем пипетка перемещается вправо от промывочного углубления, и при этом проверяется нулевое положение электродвигателя.
Затем электродвигатель включается в прямом направлении и выталкивает обратно жидкость, содержащуюся в пипетке, в углубление.
Затем устройство начинает промывочную фазу, во время которой клапаны EV2 и EV3 открыты, и при этом клапан EV1 закрыт.
Во время этой фазы электродвигатель выполняет последовательность вращательных движений в прямом направлении, чтобы обеспечить выпуск в несколько этапов, каждый из которых соответствует одному или нескольким шагам электродвигателя.
В конце промывки клапан EV3 закрывается и клапаны EV1 и EV2 открываются. Электродвигатель работает в обратном направлении и создает всасывание промывочной жидкости поршнями Р и Р'. Эта фаза продолжается до тех пор, пока электродвигатель не займет положение несколько ниже нулевого уровня.
Затем устройство начинает фазу проверки нуля, во время которой электродвигатель работает в прямом направлении до обнаружения нулевого положения.
Клапан EV1 затем снова закрывается, и электродвигатель работает в обратном направлении, пока электродвигатель не вернется в положение, находящееся несколько ниже нулевого уровня (регулирование люфта).
Цикл затем заканчивается, и устройство возвращается в исходное состояние, при этом клапаны EV1 и EV3 открыты, клапан EV2 закрыт и электродвигатель МР остановлен.
Описываемое выше устройство предпочтительно имеет размеры, совместимые с применяемыми в настоящее время роботами-анализаторами.
Например, при использовании этого устройства в роботе, описываемом в документе FR 2779827:
- минимальный объем отбора может составлять 5 мл, максимальный - 250 мл (этот объем определяется регулированием числа шагов электродвигателя во время фаз всасывания и выталкивания).
- для функции восстановления реагента: максимальный объем отбора может составлять 8 мл.
- начальный расход может составлять 24,4 мл/сек или 73,2 мл/сек; причем максимальное значение расхода составляет 366 мл/сек.
- устройство может выполнять 10 последовательных промывок объемом 150 мл с периодом 100 мсек/промывка, при этом давление на промывочных этапах составляет 3 бар.
- применяемый электродвигатель МР может представлять собой шаговый, имеющий обратный ход, электродвигатель, имеющий 200 шагов/вращение.
- диаметр поршня корпуса средства 1 отбора может составлять 14 мм, и при этом диаметр поршня корпуса средства 2 отбора может составлять 3 мм.
- длина двух каналов может составлять 55 мм.
В примерах согласно Фиг. 4, 5 и 6: корпуса двух устройств 1, 2 отбора выполнены заодно в пластмассовом блоке BL, например, из Плексигласа (зарегистрированный товарный знак) по существу в форме параллелепипеда.
Корпус имеет два канала AL1, AL2, центрированных параллельно вертикальной оси симметрии блока, и указанные каналы выходят наружу на уровне нижнего торца блока. В их верхних частях эти два канала оканчиваются двумя соответствующими коническими частями РС1, РС2, расположенными на определенном расстоянии от верхнего торца.
В пространстве между двумя каналами AL1, AL2 выполнена полость СА, выходящая в нижний торец и переднюю поверхность; и также выполнен вертикальный проход PV, который проходит между верхним торцом полости СА и верхним торцом блока.
К нижнему торцу блока прикреплено основание ЕМ, имеющее два поперечных вертикальных прохода, в которых установлены два соответствующих узла штока/поршня ТР1, ТР2, выполненные, например, из нержавеющей стали и с возможностью поступательного герметичного перемещения внутри, соответственно, каналов AL1, AL2, причем герметичность при перемещении обеспечивается с помощью динамических прокладок.
Верхние оконечные пределы этих узлов штока/поршня конические, при этом их нижние оконечные пределы имеют соответствующие горловины, обеспечивающие их фиксирование, с возможностью съема, в крайних положениях горизонтального ответвления исполнительного элемента РА, имеющего вид перевернутой буквы Т.
Вертикальное ответвление этого исполнительного элемента РА зафиксировано в нижнем крайнем пределе вертикальной направляющей RV, перемещающейся поступательно в вертикальном направлении и проходящей в полость через посредство отверстия в основании и потом через проход PV.
На этой направляющей установлена рейка CR, с которой зацепляется шестерня PN и приводится в движение электродвигателем с обратным ходом (блок штриховыми линиями указывает МР), и которая находится в полости.
Три электроклапана EV1, EV2, EV3 установлены на передней поверхности корпуса и сообщаются с трубопроводами, выполненными в блоке В согласно контуру, показываемому на фиг. 1.
Для определения «нулевого» положения направляющей RV предусмотрен оптический датчик FO.
Это устройство функционирует идентично описываемому выше и его подробное описание не приводится здесь.
Это техническое решение оказалось особо целесообразным по причине его компактности, легкости его интегрирования, его способности устранять пузырьки за счет конических форм, его точности благодаря точности узла штока/поршня ТР1, ТР2, который возможно подвергнуть очень точной станочной обработке, и благодаря его надежности.
В частности устранение пузырьков обусловлено наличием и конических форм узла ТР1, ТР1, и цилиндрических каналов AL1, AL1, а также состоянием поверхности этих элементов. Помимо этого, проход пузырьков облегчен благодаря тому, что коническая форма РС1 цилиндрического канала AL2 с наименьшим диаметром непосредственно сообщается с трубопроводом, соединенным со средством АР отбора.
Разумеется, данное изобретение не ограничивается его описываемым выше осуществлением.
Оно также относится к модульному устройству с насосными модулями, сборка которых показана на фиг. 7 и 8.
В этом примере: каждый модуль М1 - М4 имеет цилиндрическую полость СС1, СС2, в которой узел штока/поршня ТР1, ТР2 выполнен с возможностью поступательного герметичного перемещения и приводится в действие электроприводом (блок МО), общим для всех узлов штока/поршня ТР'1, ТР'2.
Этот модуль имеет корпус с двумя параллельными монтажными поверхностями FA1, FA2, в которые выходит поперечный трубопровод СТ, сообщающийся с цилиндрической полостью СС1 и имеющий часть, выполненную с возможностью ее герметизации действующей от электромагнита заглушкой (устройство, образующее электроклапан EV'1).
На уровне монтажных поверхностей отверстия этого трубопровода СТ имеют соединительное средство, обеспечивающее возможность герметичного соединения секций трубопровода СТ нескольких модулей, когда те собраны вместе посредством их монтажных поверхностей и зафиксированы в нужном положении, например, соединительными стержнями TR.
Аналогично вышеизложенному: трубопровод, полученный за счет соединения разных поперечных трубопроводов СТ, на одной стороне соединен с гнездом RL промывочной жидкости, а, на другой стороне - с иглой АР отбора посредством электроклапана EV'3.
Электроклапаны EV'1, EV'2, EV'3 и электропривод МО соединены со схемой МС управления микропроцессором.
Каждый из модулей М1 - М4 также содержит трубопровод CP, сообщающийся с цилиндрической полостью СС1 и выходящий к верхней поверхности модуля через отверстие, образуя параллельный выход SR. Этот трубопровод CR можно герметизировать заглушкой, управляемой электромагнитом; при этом это устройство образует электроклапан EV'2, аналогичный электроклапанам EV'1 и управляемый схемой управления.
Эти параллельные выходы SP могут быть соединены с иглой АР отбора общим коллектором.
Очевидно, что эта модульная конструкция очень гибкая и ее можно адаптировать ко многим ситуациям, изменяя число модулей, выбирая модули с полостями соответствующего диаметра, комбинируя модули, электроклапаны которых имеют одинаковые характеристики, выбирая выходы, более соответствующие выполнению нужных функций и пр. Разумеется, этот выбор можно обеспечить программой, выполняемой управляющей схемой МС.





Изобретение относится к автоматическому прецизионному устройству отбора с промывкой пипетки. Устройство согласно изобретению содержит по меньшей мере два насосных устройства цилиндропоршневого типа, которые приводятся в действие общим электродвигателем (МР). Насосная камера каждого из насосных устройств соединена с контуром, содержащим, последовательно: канал, выходящий в резервуар (RL) промывочной жидкости, три последовательных электромагнитных клапана (EV1, EV2, EV3), и часть контура, которая соединяет второй электромагнитный клапан (EV2) с пипеточным средством (АР). Более крупная насосная камера соединена в той части контура, которая обеспечивает соединение между двумя электромагнитными клапанами (EV1, EV3), при этом вторая насосная камера соединена с указанной частью контура посредством соединителя, причем указанная часть контура содержит электромагнитный клапан (EV3), расположенный между соединителем и пипеточным средством. Достигается повышение надежности и точности работы устройства. 16 з.п. ф-лы, 8 ил.
по меньшей мере два насосных устройства разной производительности, каждое из которых имеет цилиндрическую полость (AL1, AL2), внутри которой узел штока/поршня (TP1, TP2) поступательно перемещается с обеспечением герметичности, при этом указанный узел ограничивает указанной полостью рабочую камеру, объем которой изменяется в соответствии с осевым положением узла штока/поршня (TP1, ТР2), при этом концевые части двух узлов штока/поршня (TP1, TP2), которые выходят из двух полостей, будучи связанными с исполнительным элементом, приводятся в действие общим электроприводом (МО или МР), причем рабочая камера каждого из насосных устройств (1, 2) соединена с контуром, последовательно содержащим трубопровод, выходящий в резервуар (RL) промывочной жидкости, два последовательных электроклапана (EV1, EV2) и часть контура, соединяющую второй электроклапан (EV2) со средством отбора (АР), причем более крупная рабочая камера соединена с той частью контура, которая обеспечивает связь между двумя электроклапанами (EV1, EV2), при этом вторая рабочая камера соединена с указанной частью контура посредством соединителя; отличающееся тем, что указанная часть контура содержит электроклапан (EV3), расположенный между соединителем и указанным средством отбора; при этом указанными электроклапанами и электроприводом управляет средство управления, выполненное с возможностью обеспечения цикла отбора, включающего в себя по меньшей мере одну последовательность всасывания, при которой электродвигатель работает непрерывно в обратном направлении, создавая всасывание промывочной жидкости в двух камерах; причем указанная последовательность включает по меньшей мере следующие последовательные фазы: переходную фазу, во время которой первый клапан (EV1), находится в открытом положении, фазу взятия пробы, во время которой второй клапан (EV2) закрыт и третий клапан (EV3) открыт, завершение фазы взятия пробы - закрытие третьего клапана (EV3).
| US 5474744 А, 12.12.1995 | |||
| Смесительно-дозирующее устройство для анализатора молока | 1985 |
|
SU1372228A1 |
| Смесительно-дозирующее устройство для анализатора молока | 1985 |
|
SU1288598A1 |
| Дозирующая пипетка | 1984 |
|
SU1373300A3 |
| US 3572130 A, 23.03.1971 | |||
| US 4296701 A, 22.05.1990 | |||
| US 4476095 A, 09.10.1984. | |||

