Изобретение относится к медицине, а именно к нейрохирургии, и может быть использовано при различных нейроэндоскопических операциях на ЦНС, требующих точного проведения нейроэндоскопа по оптимальной траектории к заданной цели.
Известна нейронавигационная система, содержащая нейронавигационную станцию; оптическо-локализационную систему, в состав которой входят цифровые камеры и референтная рамка; универсальную навигационная насадку; эндоскопический инструмент. При использовании универсальной насадки обязательно проводится калибровка эндоскопического инструмента. Для этого производитель навигационной системы предлагает приобретение калибровочной станции (Alberti О., Riegel Т., Hellwig D., Bertalanffy H. Frameless navigation and endoscopy // J. Neurosurg. - 2001. - Vol.95, N.3. - P.541-544).
Известна нейронавигационная система для проведения высокоточных нейроэндоскопических операций, содержащая нейронавигатор; референтную рамку; две цифровые камеры; нейронавигационный зонд; набор эндоскопического инструментария (включающий эндоскопы, троакары); специальный навигационный эндоскопический блок UITT нейронавигационную насадку, конструктивно связанную в единый блок с оптическим мостом из эндоскопического набора (Schroeder H.W., Wagner W., Tschiltschke W., Gaab M.R. Frameless neuronavigation in intracranial endoscopic neurosurgery // J. Neurosurgery. - 2001.-Vol.94, N.1. - P.72-81). UITT разработана специально для эндоскопического инструмента. Весь инструмент предварительно откалиброван производителем на калибровочной станции.
Известна нейронавигационная система, содержащая нейронавигатор, референтную рамку, две цифровые камеры и навигационный зонд, например нейронавигационная система «Voyager SX'' Marconi Medical Systems, Inc.
Вместе с эндоскопическим набором такая система может быть использована для нейроэндоскопии в том случае, если она поставлена в комплекте с универсальной навигационной насадкой и универсальной калибровочной станцией или последние приобретены дополнительно. В случае отсутствия универсальной навигационной насадки и универсальной калибровочной станции данная нейронавигационная система может быть использована только для открытых операций на головном и спинном мозге и стереотаксической биопсии, но не для эндоскопических операций.
Раскрытие изобретения
Предлагаемая нейронавигационная эндоскопическая система включает нейронавигатор, референтную рамку, две цифровые камеры и троакар с устанавливаемым в нем навигационным зондом, причем на рабочей части навигационного зонда посредством винта зафиксирована олива, а нейронавигатор выполнен с возможностью программного увеличения длины нейронавигационного зонда до длины троакара с нейронавигационным зондом и оливой, а ширины нейронавигационного зонда - до наружного диаметра троакара.
Предлагаемую нейронавигационную систему при отсутствии универсальной навигационной насадки и универсальной калибровочной станции можно использовать не только для открытых операций на головном и спинном мозге и стереотаксической биопсии, но и для эндоскопических операций. Предлагаемая система обеспечивает точную навигацию эндоскопического инструмента.
Нейронавигационный зонд состоит из навигационной насадки, конструктивно представляющей собой единое целое с рабочей частью зонда (насадка и рабочая часть неподвижно соединены). На рабочей части навигационного зонда посредством винта зафиксирована олива. Олива выполняется из твердого материала, устойчивого к агрессивным средам (например, из нержавеющей стали, сплава титана).
Наружный диаметр оливы соответствует внутреннему диаметру троакара; длина оливы с закругленной передней частью выполнена такой, чтобы обеспечить возможность надежного крепление оливы на рабочей части зонда. Передняя часть оливы выступает из троакара на 5-8 мм (для снижения травматизации мозговой ткани при проведении троакара с зондом через ткань мозга и для предотвращения попадания мозговой ткани во внутренние каналы троакара. Кроме того, олива стабилизирует положение рабочей части зонда в троакаре. При отработке длины оливы было учтено то обстоятельство, что удобно выставлять удлинение оливы в программе навигатора, например, на 30 мм, но не 32,7 мм, что будет пояснено ниже.
Размеры рабочей части навигационного зонда и оливы могут быть следующими: длина рабочей части зонда - 140 мм, ее диаметр - 3,5 мм, диаметр оливы - 5,5 мм, длина оливы - 40 мм. Олива фиксируется на рабочей части навигационного зонда погружным винтом с диаметром 2 мм, расположенным на расстоянии, например, 5 мм от верхнего края оливы. Для крепления оливы на рабочем конце зонда, который вставляется в оливу, она имеет внутренний канал диаметром 3,7 мм и глубиной 10 мм. Внутренний диаметр троакара - 5,6 мм, наружный - 6 мм, общая длина троакара - 165 мм.
Иллюстративный материал
Фиг.1. Нейронавигационная эндоскопическая система: нейронавигатор (1); две цифровые камеры (2), воспринимающие электромагнитное излучение в инфракрасном диапазоне (3), идущее от 4-х диодов (4); провода (5), связывающие элементы оптическо-локализационной системы с нейронавигатором; нейронавигационная часть (6) зонда с диодами; рабочая часть (7) зонда; олива (8); погружной винт (9).
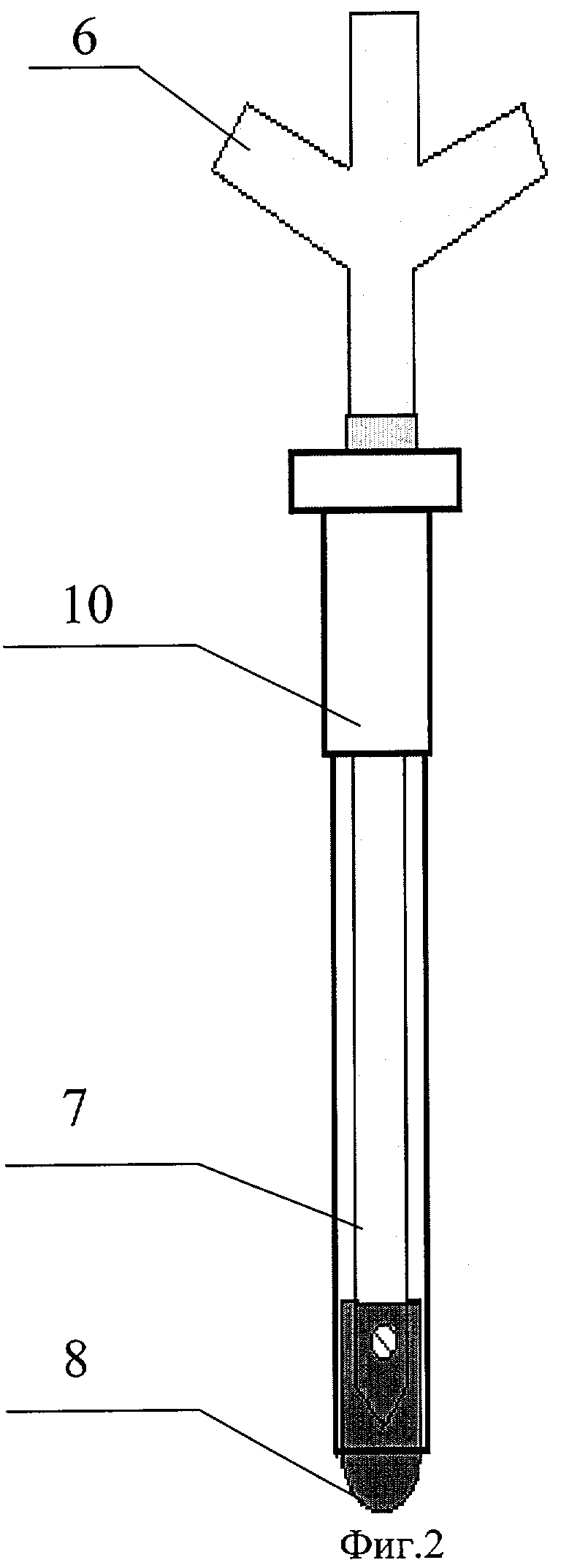
Фиг.2. Нейронавигационный зонд, установленный в троакар: нейронавигационная часть (6) зонда; троакар (10); рабочая часть (7) зонда; олива (8).
Предлагаемая нейронавигационная эндоскопическая система создана на основе нейронавигационной системы (станции) 'Voyager SX'' Marconi Medical Systems, Inc. (США) в составе: нейронавигатор, референтная рамка, две цифровые камеры, навигационный зонд. Используется эндоскопический инструмент из эндоскопического набора. Станция работает в инфракрасном спектре. Нейронавигационный зонд предназначен для использования в открытых операциях на головном и спинном мозге в составе оптическо-локализационной системы нейронавигационной станции. Он используется для регистрации томографических данных головы пациента в нейронавигаторе и реальной головы пациента на операционном столе, для планирования доступа к заданной цели и во время проведения открытых операций на структурах центральной нервной системы с целью верификации месторасположения образования, его границ и проч.
В программном обеспечении нейронавигационной системы 'Voyager SX'' Marconi Medical Systems, Inc. (США) имеются опции, позволяющие увеличить длину и ширину виртуального инструмента (без изменения размеров реального инструмента) - с целью определения длины (глубины) до цели и ширины, например, шурупа в спинальной навигации. Данные опции не предназначены для виртуального представления изменения длины и ширины реального навигационного инструмента.
В данном изобретении указанные опции использованы по другому назначению, не предусмотренному инструкцией к 'Voyager SX'' Marconi Medical Systems, Inc., а именно - для программного увеличения длины (виртуального) нейронавигационного зонда до длины троакара с нейронавигационным зондом и оливой, а ширины (виртуального) нейронавигационного зонда - до наружного диаметра троакара.
Изменив размеры реального навигационного инструмента, авторы должны были обеспечить адекватное их представление в программной оболочке нейронавигатора, для чего обычно используют универсальную калибровочную станцию. Размеры рабочей части зонда должны были быть заменены на размеры троакара с выступающей из него передней частью оливы зонда. В отсутствие калибровочной станции для достижения указанной цели были использованы вышеуказанные опции, что Инструкцией к «Voyager» и указаниями по применению данных функций не предусмотрено.
Для этого в программной оболочке навигатора увеличивается длина зонда на величину разницы между длиной оливы и глубиной погружения в нее рабочего конца зонда (например, на 30 мм) и таким образом устанавливается соответствие (равенство) длины реального и виртуального инструмента. Ширина виртуального инструмента доводится до 6 мм, что соответствует наружному диаметру троакара. Расстояние от кончика навигационного зонда до переднего кончика оливы в предлагаемом устройстве сделано кратным 10 мм (и составляет, например, 30 мм) для удобства выставления виртуальных параметров в нейронавигаторе при коррекции размеров навигационного инструмента.
После коррекции метрических данных нейронавигационного инструмента нейрохирург может в интерактивном режиме контролировать местонахождение нейронавигационного инструмента на дисплее навигатора и проводить его по оптимальной навигационной траектории с точностью до 1 мм к заданной цели.
Система работает и используется следующим образом.
Накануне или утром перед операцией больному проводится спиральная компьютерная томография головного мозга с радиологическими метками, которые крепятся к коже головы пациента в области предстоящей операции в количестве 3-4 штук. Данные томографии по локальной сети переводятся в нейронавигатор. Затем осуществляется построение нейронавигационной модели головы пациента и планируется оптимальная траектория к заданной цели. После проведения общей анестезии голова больного закрепляется в жесткую раму Мейфилда, около головы к операционному столу крепится референтная рамка, которая задает постоянную систему координат относительно головы пациента. Далее проводится регистрация меток с помощью навигационного зонда на голове пациента с созданием активной навигационной модели в навигаторе. После обработки операционного поля планируется с помощью навигационного зонда оптимальное место для кожного разреза и трефинации. После разреза твердой мозговой оболочки, перед этапом проведения нейроэндоскопии на рабочую часть нейронавигационного зонда надевается олива и жестко фиксируется погружным винтом с помощью отвертки. Далее рабочая часть зонда с оливой устанавливается в троакар. Затем в программе нейронавигатора изменяют размеры виртуального инструмента: увеличивают длину, например, на 30 мм и ширину доводят до величины наружного диаметра троакара, равной, например, 6 мм. Проводится контроль положения нейронавигационного зонда с оливой, вставленного в троакар, относительно головы пациента. Для этого осуществляется произвольная установка кончика оливы в нескольких анатомических точках на коже и кости в проекции операционной раны с параллельным контролем визуальной картинки на дисплее. Далее хирург под нейронавигационным контролируемым в режиме реального времени наведением проводит троакар с навигационным зондом в заданную точку в головном мозге и жестко фиксирует троакар в фиксаторе Гринберга. Затем нейронавигационный зонд с оливой изымается из эндоскопического троакара и проводится этап стандартной нейроэндоскопии под видеомониторингом. В случае необходимости хирург может в любой момент операции убрать эндоскоп, повторно вставить в троакар нейронавигационный зонд с оливой и проконтролировать положение кончика оливы в глубине раны в режиме реального времени. После окончания эндоскопического этапа троакар вместе с эндоскопом убирают из раны, проводят тщательный гемостаз и послойное ушивание раны.
Таким образом, дополнение навигационного зонда оливой, обеспечившей жесткое соединение навигационного зонда с эндоскопическим инструментом (троакаром), позволило избежать необходимости приобретения универсальной навигационной насадки, соединяющей в других нейронавигационных эндоскопических системах навигационную часть с эндоскопическим инструментом (например, в аналоге).
В условиях, когда 1) эндоскопический инструмент не был откалиброван производителем заранее (как в прототипе), 2) отсутствовала универсальная калибровочная станция для калибровки эндоскопического инструмента, оказалось возможным «прописать» измененный навигационный зонд в навигационной системе, т.е. обеспечить точное соответствие между размерами реального инструмента и его виртуальным представлением и таким образом обеспечить точную навигацию.
Данное изобретение позволило использовать нейронавигационную систему «Voyager SX'' Marconi Medical Systems, Inc. - при отсутствии в ее составе универсальной навигационной насадки и калибровочной станции - не только для открытых нейрохирургических операций, но и для проведения малоинвазивных эндоскопических операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИКАЛЬНОГО УДАЛЕНИЯ ГЛУБИННО РАСПОЛОЖЕННЫХ ГЛИАЛЬНЫХ ВНУТРИМОЗГОВЫХ ОПУХОЛЕЙ | 2011 |
|
RU2457794C1 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
| Способ выполнения эндоскопической кистоцистерностомии арахноидальной кисты средней черепной ямки миниатюрным нейроэндоскопом | 2019 |
|
RU2729392C1 |
| СПОСОБ МАЛОИНВАЗИВНОГО УДАЛЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ВЕЩЕСТВА ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ НЕЙРОНАВИГАЦИИ И НАПРАВИТЕЛЯ | 2023 |
|
RU2814763C1 |
| СПОСОБ ЛАПАРОСКОПИЧЕСКОЙ ИНТУБАЦИИ ТОНКОЙ КИШКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609254C1 |
| Неинвазивное нейронавигационное устройство для фиксации трекеров | 2019 |
|
RU2727761C1 |
| СПОСОБ МАРКИРОВКИ ГОЛОВЫ ПАЦИЕНТА ПРИ РАБОТЕ С ИНТРАОПЕРАЦИОННОЙ БЕЗРАМНОЙ НЕЙРОНАВИГАЦИЕЙ | 2015 |
|
RU2607404C2 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВЫЕ ТОЧКИ ГОЛОВНОГО МОЗГА | 2016 |
|
RU2638284C2 |
| ЗОНД С ОЛИВОЙ НА ПОДВИЖНОМ КОНЦЕ | 2013 |
|
RU2549482C1 |
| Способ проекционной разметки хирургического доступа в нейрохирургии | 2022 |
|
RU2792552C1 |
Изобретение относится к медицине, а именно к нейрохирургии, и может быть использовано при различных нейроэндоскопических операциях на центральной нервной системе, требующих точного проведения нейроэндоскопа по оптимальной траектории к заданной цели. Нейронавигационная эндоскопическая система включает нейронавигатор, референтную рамку, две цифровые камеры, навигационный зонд и троакар, при этом на рабочей части навигационного зонда посредством винта зафиксирована олива, а нейронавигатор выполнен с возможностью программного увеличения длины нейронавигационного зонда до длины троакара с нейронавигационным зондом и оливой, а ширины нейронавигационного зонда - до наружного диаметра троакара. Использование изобретения позволяет снизить риск смещения навигационной части относительно рабочей части устройства и опасности, связанной с потерей навигации при повороте эндоскопа. 2 ил.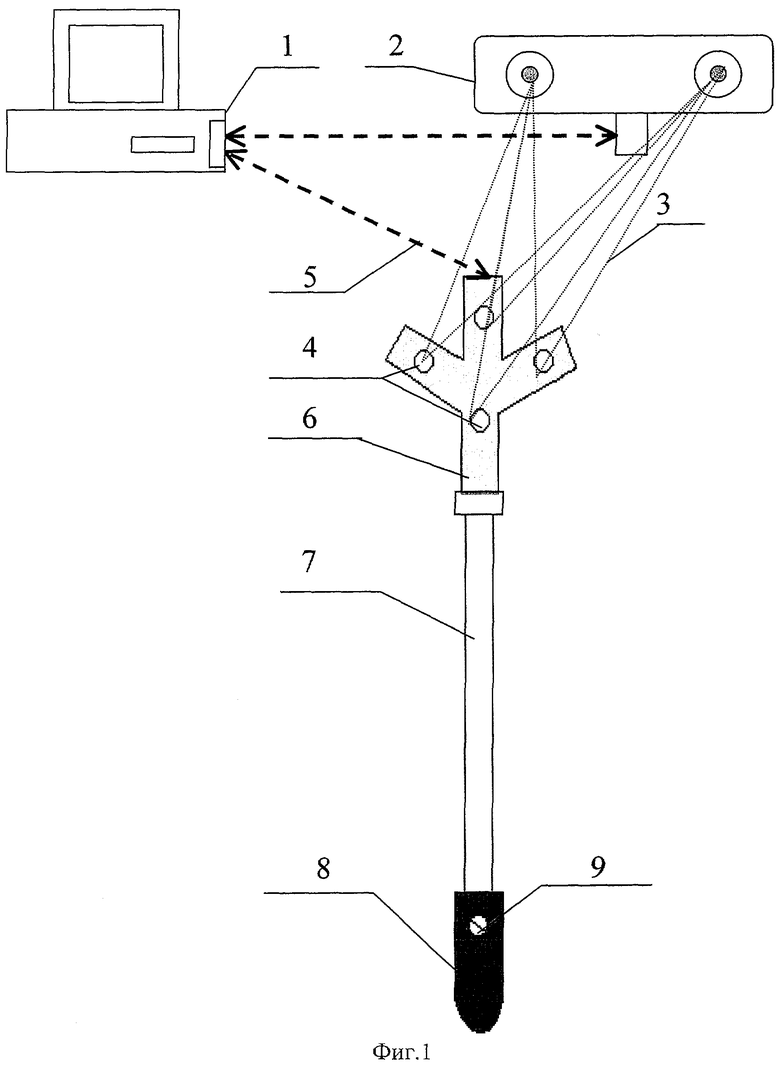
Нейронавигационная эндоскопическая система, включающая нейронавигатор, референтную рамку, две цифровые камеры, навигационный зонд и троакар, отличающаяся тем, что на рабочей части навигационного зонда посредством винта зафиксирована олива, а нейронавигатор выполнен с возможностью программного увеличения длины нейронавигационного зонда до длины троакара с нейронавигационным зондом и оливой, а ширины нейронавигационного зонда - до наружного диаметра троакара.
| US 6236875 B1, 22.05.2001 | |||
| US 6640127 В1, 28.10.2003 | |||
| US 5540711 А, 30.07.1996 | |||
| US 5941893 A, 24.08.1999 | |||
| RU 2002100571 А1, 20.09.2003 | |||
| ALBERTI О | |||
| et al | |||
| Frameless navigation and endoscopy., J.NEUROSURG, 2001, vol.96, №3, p.541-544. |

