Изобретение относится к медицине, а именно к нейрохирургии глубинных отделов головного мозга, и может быть использовано для диагностики и малотравматичного хирургического лечения глиальных опухолей головного мозга, а также для проведения функциональных стереотаксических операций у пациентов с эпилепсией, паркинсонизмом и некоторыми психическими нарушениями.
Нейрохирургические вмешательства на глубоких отделах головного мозга требуют тщательного предоперационного планирования и высокой точности нацеливания инструмента в намеченную область мозга. Как правило, для проведения таких операций используются рамные стереотаксические системы (Lozano A.M. et al. (eds.), 2009), обеспечивающие точное введение стереотаксической канюли в запланированные целевые точки мозга через фрезевое отверстие, наложенное на голове пациента.
С их помощью осуществляются точечные лечебные деструкции и имплантации электродов в таких глубоких структурах мозга, как ядра таламуса, медиобазальные структуры височной доли и другие подкорковые структуры, что позволяет добиться лечебного эффекта у пациентов с паркинсонизмом, эпилепсией и некоторыми нарушениями психики (Шабалов В.А., Томский А.А., 2003; Аничков А.Д. с соавт., 2006). Кроме того, рамный стереотаксис используется для биопсии и прицельной лечебной деструкции глубинных опухолей головного мозга, недоступных для открытого хирургического удаления (Гайдар Б.В., Парфенов В.Е., Низковолос В.Б., и др., 2005).
В известных рамных стереотаксических системах (LSS, BRW, CRW) в качестве внешнего позиционирующего устройства используют диагональные локализаторы, которые на время томографического исследования пациента соединяют с укрепленной на голове пациента рамой. Полученные томографические изображения срезов локализатора, связанные с изображениями мозга пациента используют в качестве внешних маркеров, что позволяет в дальнейшем провести стереотаксические расчеты координат внутримозговых целевых точек и осуществить доставку стереотаксического инструмента в целевые точки.
Однако приведенная методика обладает рядом недостатков. Она включает в себя предварительную фиксацию к голове пациента стереотаксической рамы с диагональным локализатором посредством винтовых упоров, ввинчивающихся в кости черепа. Затем пациента транспортируют в кабинет компьютерной или магнитно-резонансной томографии. С помощью томографии выполняют сканирование головы пациента, планирование целевых точек в глубоких отделах мозга и траекторий введения стереотаксического инструмента, а также компьютерные стереотаксические расчеты, необходимые для математической «привязки» целевых точек мозга пациента к пространству стереотаксической рамы. После этого пациента транспортируют в операционную, где ему выполняют оперативное вмешательство по введению стереотаксических инструментов в запланированные целевые точки мозга и осуществлению диагностических и лечебных воздействий в этих зонах. Вся процедура может занимать 3-4 часа и даже дольше, особенно при большом количестве целевых точек, например, когда необходимо ввести электроды в несколько структур головного мозга при эпилепсии или выполнить многопозиционную лечебную деструкцию распространенной глубинной опухоли мозга. Такая большая длительность операции может тяжело переноситься пациентом (учитывая, что большинство таких операций необходимо выполнять под местной анестезией), а также приводить к повышенному напряжению и утомлению оперирующего медицинского персонала. Кроме того, при такой организации проведения операций необходимо четкое согласование графика работы отделения КТ или МРТ и операционной, что не всегда осуществимо и также ведет к увеличению общей продолжительности процедуры. Необходимо также отметить, что с самого начала процедура носит инвазивный характер (вследствие «острой» фиксации стереотаксической рамы к голове пациента винтовыми упорами). По этой причине перемещения пациента вне операционной при его транспортировке в отделение томографии и обратно, а также его нахождение в кабинете томографии, в отсутствии асептических условий, ведут к повышенному риску инфицирования и гнойных осложнений.
Такая организация стереотаксической процедуры с использованием рамных систем является «жесткой», то есть предполагает строгое выполнение всех элементов процедуры в определенной последовательности без возможности их разделения во времени и переноса каких-либо этапов на другой день.
Известно также, что в последние годы для выполнения вмешательств на глубинных отделах головного мозга, в качестве альтернативы рамным стереотаксическим системам, применяются безрамные, или навигационные системы (Lozano A.M. et al. (eds.), 2009). Для использования таких систем характерно, что они позволяют разделять во времени процедуры предоперационной томографии головного мозга, поиска целевых точек на томограммах и планирования траекторий введения стереотаксической канюли в мозг, а также непосредственно самой операции. Таким образом, эти этапы могут проводиться независимо (автономно) друг от друга. Такая «гибкая» организация стереотаксической процедуры достигается за счет того, что сканирование головы пациента на томографе осуществляется без установки на нее стереотаксической рамы. Вместо рамы к голове больного фиксируют несколько (обычно 5-8) специальных меток (маркеров), видимых на томограммах. Результаты томографии записывают на компакт-диск в электронном формате DICOM и загружают в планирующую станцию (компьютер) навигационной системы. При помощи программного обеспечения навигационной системы осуществляют пространственную «привязку» выбранных на томограммах целевых точек мозга к маркерам, укрепленным на голове пациента. Предоперационная томография мозга больного может выполняться не обязательно в день операции, возможно ее проведение накануне, важно лишь, чтобы маркеры сохранялись на голове больного до момента осуществления оперативного вмешательства. Во время операции безрамные системы при помощи специальных регистрирующих устройств фиксируют пространственное положение маркеров по отношению к референтной рамке, укрепленной неподвижно по отношению к голове больного. Это позволяет программному обеспечению навигационной системы осуществить пространственную «привязку» целевых точек мозга к референтной рамке. Кроме того, навигационная система при помощи маркеров, крепящихся к стереотаксической канюле, позволяет отслеживать ее положение в текущий момент времени по отношению к референтной рамке и пространству головного мозга. Это дает возможность нацеливания стереотаксической канюли на выбранные целевые точки и отслеживать ее продвижение через мозг пациента при помощи интраоперационного монитора, на который выводятся предоперационные томограммы больного. Таким образом, преимуществами использования безрамной навигации является возможность заблаговременного проведения предоперационной томографии и планирования операции, а также отсутствие необходимости наличия стереотаксической рамы на голове пациента во время томографии, что гораздо легче переносится пациентом. Кроме того, положительными свойствами являются высокая наглядность при проведении вмешательства (возможность интерактивного отображения положения стереотаксической канюли в головном мозге больного на интраоперационном мониторе) и возможность, в случае необходимости, быстрого нацеливания на новые, незапланированные ранее целевые точки, прямо во время операции.
Основным параметром, существенно влияющим на точность наведения на запланированные мишени в глубинных отделах головного мозга при использовании систем безрамной нейронавигации, является способ фиксации маркеров к голове пациента. Для обеспечения низкой погрешности, допустимой для проведения таких операций, необходимо добиваться высокой степени неподвижности маркеров по отношению к структурам головного мозга.
Для безрамных навигационных систем известны способы маркировки головы пациентов - например, с использованием меток, наклеиваемых на кожные покровы головы пациента перед проведением томографии головного мозга (Shamir R.R. et al., 2012). Известна также методика регистрации естественной кривизны поверхности лица и скальпа больного с последующим компьютерным совмещением рельефа поверхности с поверхностью трехмерной модели головы, построенной на основе предоперационной томографии (Raabe A. et al., 2003). Последняя методика вообще не требует маркировки головы. Такие методики, использующиеся для расчетной подготовки и планирования операций, являются неинвазивными и значительно повышают «гибкость» процедуры, делая подготовку операций безболезненной для пациента и позволяя проводить предоперационную томографию и планирование операции за несколько дней до операции.
Однако существенным недостатком упомянутых методик является невозможность обеспечения требуемой точности нацеливания на запланированные для вмешательства точки в глубине головного мозга. Несмотря на то что производители навигационных систем декларируют низкую погрешность при использовании маркировки кожных покровов (в пределах 1 мм), независимые исследования показывают, что точность наведения достоверно ниже, по сравнению с использованием костно-имплантируемых маркеров или рамных стереотаксических систем (Woerdeman Р.А. et al., 2007; Mascott C.R. et al., 2006; Pfisterer W.K. et al., 2008). Причиной снижения точности является высокая подвижность кожных покровов головы по отношению к черепу и головному мозгу, причем направление и величина возможного смещения кожи и меток во время операции (по сравнению с их положением во время томографии головного мозга) являются непредсказуемыми. Смещение накожно-фиксируемых маркеров особенно проявляется во время местной анестезии при фиксации головы скобами Мэйфилда и организации фрезевого отверстия. Это приводит к тому, что средняя погрешность наведения на целевые точки мозга при использовании упомянутых методик составляет 4,0±1,7 мм, причем, по результатам измерений, достоверная разница между точностью регистрации накожных маркеров и точностью регистрации поверхности рельефа кожных покровов отсутствует (Mascott C.R. et al., 2006). В связи с этим, производители навигационных систем не рекомендуют использовать накожные маркеры и регистрацию рельефа поверхности головы для функциональных операций на глубинных структурах мозга. Область применения этих методик ограничивается случаями, когда высокая точность попадания в намеченные целевые точки мозга не является необходимой - например, при имплантации вентрикулоперитонеальных шунтов в расширенные желудочки головного мозга, при стереотаксической биопсии внутримозговых опухолей сравнительно большого размера, а также для навигационного сопровождения открытых операций на головном мозге (Савелло А.В., 2008).
Наиболее близким к предлагаемому является способ маркировки головы пациента путем внедрения специальных маркеров в кости черепа. Дня проведения операций на глубинных отделах головного мозга с использованием навигационных систем используются маркеры, основание которых при помощи специальных шпилек или винтов крепят к костям черепа пациента перед проведением предоперационной томографии головного мозга. Это обеспечивает необходимую неподвижность маркеров и позволяет добиваться крайне низкой погрешности, не уступающей «рамному» стереотаксису - в среднем 1,35 мм для наведения по MPT (Thompson Е.М. et al., 2011) и 0,91 мм для наведения по КТ (Pillai P. et al., 2008). Такой уровень погрешности наведения на целевые точки мозга считается приемлемым для осуществления функциональных стереотаксических операций, а также биопсий и лечебных деструкций глубинных опухолей мозга, в том числе небольшого (1-2 см) размера (Lozano A.M. et al. (eds.), 2009). Существенным недостатком такого метода маркировки головы пациента является его инвазивность. Фиксация меток к костям черепа связана с разрезом или проколом кожных покровов, является болезненной для пациента и может служить причиной проникновения инфекции в мягкие ткани или кости черепа. Риск инфицирования возрастает с увеличением времени нахождения меток на голове пациента, поэтому продолжительность времени между предоперационной томографией и операцией не может быть слишком длительной. Это обстоятельство требует проведения операции вскоре после томографии, что, в свою очередь, снижает «гибкость» организации стереотаксической процедуры и делает ее менее удобной для пациентов и медицинского персонала, осуществляющего процедуру. Другим недостатком, связанным с инвазивностью данного метода маркировки головы, является необходимость использования дорогостоящих одноразовых меток, что повышает себестоимость операции.
Технический результат настоящего изобретения состоит в создании неинвазивных условий проведения предоперационной томографии головного мозга пациентов при подготовке операций с использованием навигационных безрамных систем, с одновременным сохранением высокой точности наведения на целевые точки мозга. Благодаря этому обеспечиваются более комфортные для пациента условия проведения подготовки операций, снижается риск инфицирования, а также создается возможность заблаговременного проведения предоперационной томографии. Все это создает условия для существенного улучшения показателей хирургического лечения пациентов.
Этот результат достигается благодаря тому, что маркеры устанавливаются относительно головы пациента посредством их фиксации к индивидуальному оттиску его зубов и прикусыванию пациентом этого оттиска. Это обеспечивает необходимую неподвижность меток по отношению к черепу и головному мозгу, воспроизводимость их пространственного положения при повторном прикусывании оттиска, а также полную неинвазивность данного метода маркировки головы.
Зубы верхней челюсти являются неподвижными по отношению к костным элементам головы. Следовательно, конструкция, прикрепляющаяся к затвердевшему зубному оттиску, сохраняет свое пространственное положение по отношению к черепу и головному мозгу во время прикусывания пациентом зубного оттиска. Такая конструкция может являться основой для фиксации маркеров, регистрирующихся навигационной системой. Важным свойством также является воспроизводимость одного и того же положения конструкции, крепящейся к зубному оттиску, по отношению к черепу и головному мозгу. Это обеспечивается тем, что каждый зуб верхней челюсти во время повторных прикусываний затвердевшего индивидуального оттиска погружается в созданное им углубление, что препятствует неправильной пространственной позиции конструкции, связанной с оттиском и несущей маркеры. При этом фиксация конструкции к голове пациента при помощи прикусывания зубного оттиска производится, во-первых, во время предоперационной томографии головного мозга, а во-вторых, в самом начале операции, во время регистрации маркеров навигационной системой. В промежуток времени между томографией и операцией, а также во время основного этапа операции необходимость фиксации маркеров к голове пациента отсутствует.
Сущность метода заключается в следующем.
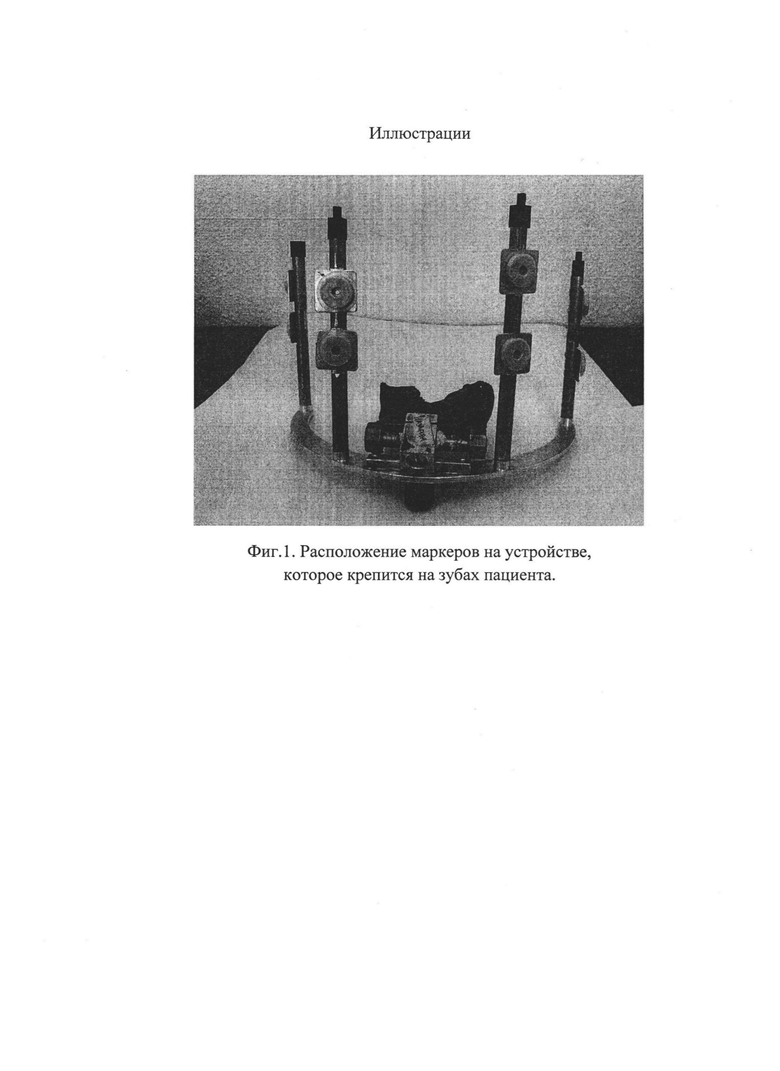
Перед проведением предоперационной томографии головного мозга пациенту изготавливают индивидуальный зубной оттиск из застывающей стоматологической массы. Для этого используют небольшой металлический лоток, повторяющий размеры и форму альвеолярных дуг челюстей и имеющий углубления, в которые заливается разогретая до состояния размягчения термопластичная стоматологическая масса. Затем лоток помещают в рот пациента, после чего он его прикусывает до погружения зубов верхней и нижней челюсти в размягченную массу. В таком положении лоток удерживается во рту до застывания массы (около 1 минуты). После застывания готовый оттиск вынимают изо рта пациента, убеждаются в наличии четких углублений от зубов и воспроизводимости положения оттиска во рту при его повторном прикусывании. Затем к лотку крепят легкую конструкцию, имеющую четыре вертикальных стержня, располагающиеся по бокам и спереди по отношению к голове пациента. На эти стержни неподвижно фиксируют восемь меток (Фиг. 1). Материал, из которого изготовлены метки, позволяет их визуализировать на томограммах, полученных при сканировании на магнитно-резонансном и компьютерном томографах. Лоток для заполнения стоматологической массой и конструкцию, несущую метки, изготавливают из материала, не создающего артефактов и искажений на магнитно-резонансных и компьютерных томограммах, например из алюминиевого или титанового сплава.
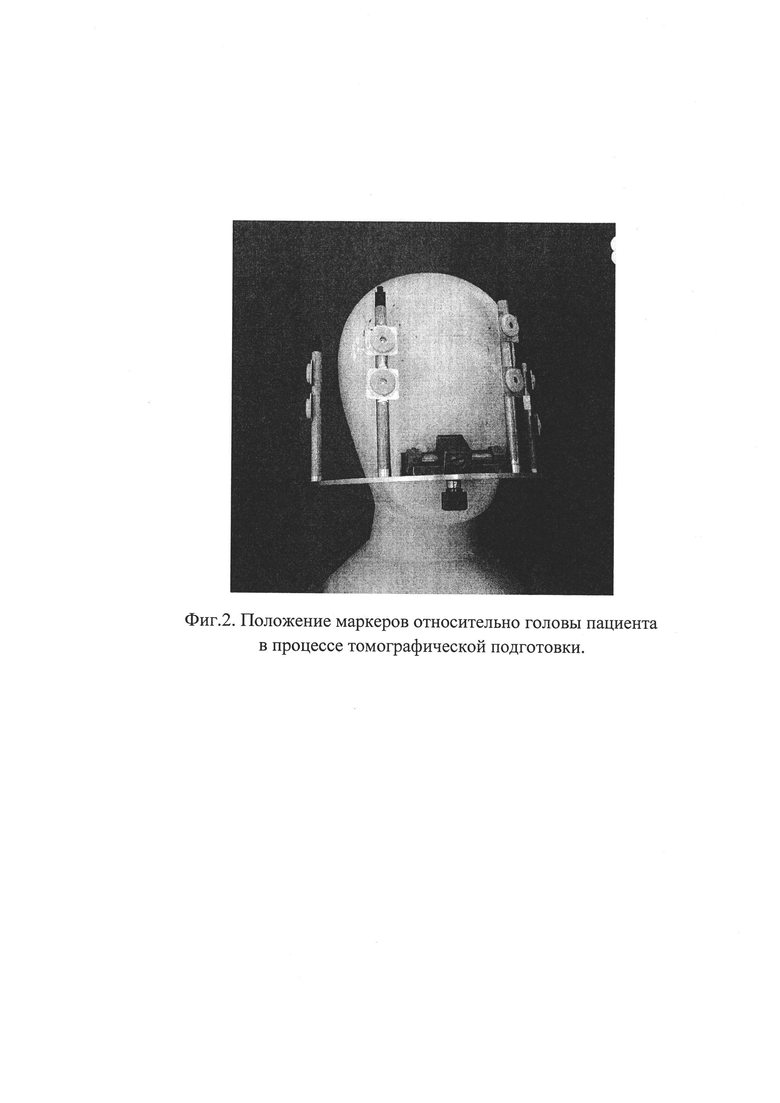
Во время предоперационной томографии головного мозга пациент удерживает во рту зубной оттиск посредством прикусывания, благодаря чему маркеры, укрепленные на стержнях, занимают определенное положение по отношению к голове пациента (Фиг. 2). Далее производят сканирование головы пациента в трехмерном режиме, характерном для работы с навигационной системой. При этом следят, чтобы все метки входили в зону сканирования.
После окончания сканирования оттиск вынимают изо рта, а пациента транспортируют в палату. Результаты предоперационной томографии записывают на компакт-диск, который далее используют для предоперационного планирования с помощью программного обеспечения навигационной системы. Оттиск и конструкцию с метками, фиксированными к нему, сохраняют в надежном месте до момента операции.
Перед началом операции пациент снова прикусывает оттиск своих зубов с фиксированной к нему конструкцией, несущей метки. При этом метки принимают то же самое положение по отношению к голове пациента, которое они занимали во время предоперационной томографии головного мозга. Средствами навигационной системы осуществляется регистрация положения меток по отношению к референтной рамке, укрепленной неподвижно по отношению к голове пациента, после чего оттиск зубов и всю конструкцию вынимают изо рта пациента. Далее выполняется оперативное вмешательство с введением стереотаксического инструмента в запланированные целевые точки мозга под контролем нейронавигации, в соответствии с намеченным планом операции. Проведенные нами фантомные испытания выявили, что средняя погрешность наведения активного конца стереотаксической канюли на целевые точки не превышает 1 мм.
Сущность метода иллюстрируется клиническими примерами.
Пациент К-н, 45 лет, обратился в клинику Института мозга человека в январе 2015 г. с жалобами на нарушения памяти. Пациент обследован в клинике, по данным магнитно-резонансной томографии выявлены зоны изменения MP-сигнала в области обоих гиппокампов, поясных извилин, задней части мозолистого тела, без признаков масс-эффекта. По данным ПЭТ с ПС-метионином патологического накопления радиофармпрепарата не отмечено. Диагноз: Лимбический энцефалит? Глиоматоз? В связи с невозможностью установления точного диагноза по данным клинико-неврологического и нейровизуализационного обследования, а также с необходимостью определения тактики лечения пациента, принято решение о проведении стереотаксической биопсии новообразования под контролем нейронавигации.
В связи с диффузным характером изменений было запланировано взятие биопсийного материала из двух целевых точек. Поскольку выявленные изменения на томограммах локализовались в глубинно расположенных структурах лимбической системы, имеющих небольшие размеры, было необходимо добиться высокой точности наведения стереотаксической биопсийной канюли. С учетом этого обстоятельства, маркировка головы пациента для нейронавигации произведена при помощи индивидуального зубного оттиска. 28 января 2015 г. выполнена предоперационная МРТ, с маркерами навигационной системы, укрепленными к голове пациента при помощи оттиска зубов. Сканирование выполнено в режиме Т1-ВИ, с толщиной аксиальных срезов 1 мм, с последующей трехмерной реконструкцией в сагиттальной и корональной плоскостях. Планирование операции осуществлено при помощи навигационной системы Medtronic StealthStation S7, намечены 2 целевые точки в области головки и задней части тела правого гиппокампа.
Оперативное вмешательство выполнено 3 февраля 2015 г., под местной анестезией, с использованием нейронавигации Medtronic StealthStation S7. Регистрация головы пациента осуществлена при помощи маркеров, фиксированных к зубному оттиску, при его повторном прикусывании. Зубной оттиск извлечен, наложено фрезевое отверстие в задних отделах правой височной области. Под контролем монитора навигационной станции в намеченные целевые точки введена биопсийная канюля, произведено взятие образцов гистологического материала. По результатам контрольной КТ головного мозга подтверждена точность попадания биопсийной канюли в целевые структуры. По результатам гистологического исследования установлен окончательный диагноз - ганглиоцитома, что послужило основанием для назначения пациенту химио- и лучевой терапии.
Предлагаемый способ по сравнению с известным способом имеет следующие преимущества.
Маркировка является атравматичной и неинвазивной, что исключает болезненные ощущения у пациента и снижает риск инфекционных осложнений.
Обеспечивается полная взаимная автономность стереотаксической операции и предоперационной томографии головного мозга, что упрощает организацию стереотаксического вмешательства. Предоперационное исследование на томографе может быть выполнено за несколько дней до операции, возможно даже исследование в амбулаторных условиях.
Процесс маркировки головы в кабинете томографии перед проведением исследования занимает всего несколько секунд.
Исключается необходимость контроля за сохранностью маркеров, укрепленных к голове пациента, в период времени между предоперационным исследованием на томографе и проведением операции.
Для размещения маркеров применяется одно для всех пациентов устройство, которое крепится к лотку с оттискной массой и индивидуальным оттиском зубов пациента, что значительно снижает необходимое количество применяемых маркеров;
Снижается себестоимость операции за счет возможности многоразового использования маркеров.
Метод пригоден для работы с безрамными навигационными системами различных производителей.
Стереотаксические операции под контролем нейронавигации по предлагаемой методике возможно осуществлять как под местной анестезией (с оптической регистрацией маркеров), так и под общим обезболиванием (с электромагнитной регистрацией).
Применение указанного метода маркировки головы пациента наиболее перспективно при использовании нейронавигации во время стереотаксических операций на таких глубинных структурах головного мозга, как таламус, бледный шар, субталамическое ядро, медиобазальные структуры височной доли, островок Рейля и т.д. Метод может быть использован как при функциональных стереотаксических операциях (при эпилепсии, паркинсонизме, психических нарушениях), так и в нефункциональном стереотаксисе - для биопсии и прицельной криодеструкции глубинных опухолей головного мозга небольшого размера. Предложенный метод разработан, прошел клиническую апробацию в клинике Института мозга человека им. Н.П. Бехтеревой Российской академии наук.
Список литературы
1. Аничков А.Д., Полонский Ю.З., Низковолос В.Б. Стереотаксические системы. - СПб.: Наука, 2006. - 142 с.
2. Гайдар Б.В., Парфенов В.Е., Низковолос В.Б., Медведев СВ., Аничков А.Д., Мартынов Б.В., Холявин А.И. Пат. РФ №2250087, МПК А61В 18/02. Способ лечения глиальных новообразований мозга; опубл. 20.04.2005, БИ №11.
3. Савелло А.В. Комплексное дифференцированное применение методов пред- и интраоперационной визуализации, нейронавигации и рентгенохирургии на этапе хирургического лечения пациентов с внутричерепными опухолями: автореф. дис.... д-ра мед. наук / А.В. Савелло. - СПб., 2008. - 36 с.
4. Шабанов В.А., Томский А.А. Хирургическое лечение болезни Паркинсона. Нейрохирургия №3. - 2003 - С. 5-15.
5. Lozano А.М., Gildenberg P.L., Tasker R.R. (Eds.) Textbook of Stereotactic and Functional Neurosurgery. - Berlin, Heidelberg: Springer Verlag, 2009. - 3287 p.
6. Mascott C.R., Sol J.C., Bousquet P., Lagarrigue J., Lazorthes Y., Lauwers-Cances V. Quantification of true in vivo (application) accuracy in cranial image-guided surgery: influence of mode of patient registration. Neurosurgery. 2006 Jul; 59(l Suppl 1):ONS 146-56.
7. Pfisterer W.K., Papadopoulos S., Drumm D.A., Smith K., Preul M.C. Fiducial versus nonfiducial neuronavigation registration assessment and considerations of accuracy. Neurosurgery. 2008 Mar; 62(3 Suppl l): 201-7.
8. Pillai P., Sammet S., Ammirati M. Application accuracy of computed tomography-based, image-guided navigation of temporal bone. Neurosurgery. 2008 Oct; 63 (4 Suppl 2): 326-32.
9. Raabe A., Krishnan R., Seifert V. Actual aspects of image-guided surgery. Surg Technol Int. 2003; 11: 314-9.
10. Shamir R.R., Joskowicz L., Shoshan Y. Fiducial optimization for minimal target registration error in image-guided neurosurgery. IEEE Trans Med Imaging. 2012 Mar; 31 (3): 725-37.
11. Thompson E.M., Anderson G.J., Roberts СМ., Hunt M.A., Selden NR. Skull-fixated fiducial markers improve accuracy in staged frameless stereotactic epilepsy surgery in children. J Neurosurg Pediatr. 2011 Jan; 7(l): 116-9.
12. Woerdeman P. A., Willems P.W., Noordmans H.J., Tulleken С A., van der Sprenkel J.W. Application accuracy in frameless image-guided neurosurgery: a comparison study of three patient-to-image registration methods. J Neurosurg. 2007 Jun; 106(6): 1012-6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВЫЕ ТОЧКИ ГОЛОВНОГО МОЗГА | 2016 |
|
RU2638284C2 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ВИСОЧНОЙ ЭПИЛЕПСИИ | 2017 |
|
RU2646748C1 |
| СПОСОБ МАЛОИНВАЗИВНОГО УДАЛЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ВЕЩЕСТВА ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ НЕЙРОНАВИГАЦИИ И НАПРАВИТЕЛЯ | 2023 |
|
RU2814763C1 |
| Способ определения локализации фокального эпилептогенного очага при проведении нейрохирургических вмешательств | 2024 |
|
RU2826782C1 |
| СПОСОБ СОВМЕЩЕНИЯ МУЛЬТИМОДАЛЬНЫХ ИЗОБРАЖЕНИЙ ГОЛОВНОГО МОЗГА | 2015 |
|
RU2607958C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ГЛИАЛЬНЫХ НОВООБРАЗОВАНИЙ ГОЛОВНОГО МОЗГА | 2008 |
|
RU2388415C2 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ | 1997 |
|
RU2130759C1 |
| СПОСОБ СТЕРЕО-ЭЛЕКТРОЭНЦЕФАЛОГРАФИЧЕСКИ НАВИГИРОВАННОЙ РАДИОЧАСТОТНОЙ ТЕРМОДЕСТРУКЦИИ ЭПИЛЕПТОГЕННЫХ ЗОН ГОЛОВНОГО МОЗГА | 2022 |
|
RU2773262C1 |
| Способ хирургического лечения опухолей головного мозга | 2017 |
|
RU2657380C1 |
Изобретение относится к медицине, нейрохирургии глубинных отделов головного мозга, может быть использовано для диагностики и малотравматичного хирургического лечения глиальных опухолей головного мозга, для проведения функциональных стереотаксических операций у пациентов с эпилепсией, паркинсонизмом и рядом психических нарушений. Для маркировки головы пациента с использованием безрамных систем нейронавигации и жестко связанных с головой пациента контрастных маркеров вначале изготавливают индивидуальный зубной оттиск пациента. К нему крепят конструкцию, имеющую четыре вертикальных стержня, располагающиеся по бокам и спереди по отношению к голове пациента. На стержни неподвижно фиксируют не менее 5 маркеров, пригодных для визуализации с помощью МРТ и КТ. Используя оттиск зубов пациента с данной конструкцией, осуществляют предоперационное планирование стереотаксического вмешательства с помощью томографии и нейронавигационной системы, при этом непосредственно перед операцией оттиск зубов с данной конструкцией извлекают изо рта пациента. Способ обеспечивает неинвазивные условия и заблаговременное проведение предоперационной томографии головного мозга пациента при подготовке к операции с использованием безрамных навигационных систем, с одновременным сохранением высокой точности наведения на целевые точки мозга. 2 ил.
Способ маркировки головы пациента при нейронавигации, включающий использование безрамных систем нейронавигации и жестко связанных с головой пациента контрастных маркеров, отличающийся тем, что вначале изготавливают индивидуальный зубной оттиск пациента, к нему крепят конструкцию, имеющую четыре вертикальных стержня, располагающиеся по бокам и спереди по отношению к голове пациента, на стержни неподвижно фиксируют не менее 5 маркеров, пригодных для визуализации с помощью МРТ и КТ; используя оттиск зубов пациента с данной конструкцией, осуществляют предоперационное планирование стереотаксического вмешательства с помощью томографии и нейронавигационной системы, при этом непосредственно перед операцией оттиск зубов с данной конструкцией извлекают изо рта пациента.
| КОЗАЧЕНКО А.В | |||
| Метод определения стереотаксических координат мишеней головного мозга человека по данным рентгеновской компьютерной томографии, дисс.к.тех.н., СПб, 2007, 168 с., см | |||
| гл.Заключение, Основные результаты и выводы пп.3,6,8 | |||
| УСТРОЙСТВО ДЛЯ БИОПСИИ ПАРЕНХИМАТОЗНЫХ ОРГАНОВ С ОДНОВРЕМЕННЫМ СПЕКТРОСКОПИЧЕСКИМ КОНТРОЛЕМ | 2013 |
|
RU2529629C1 |
| Способ наведения стереотаксического инструмента на целевую точку | 1977 |
|
SU745505A1 |
| WO 2011030276 A1, 17.03.2011 | |||
| СКУПОВ Ю.А | |||
| и др | |||
| Разработка автоматизированного комплекса выполнения нейрохирургических операций// Научно-технический вестник информационных технологий, механики и оптики, 2012, 3(79), с.153-155 | |||
| ХОЛЯВИН А.И | |||
| и др | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |

