Изобретение относится к медицине, а именно к нейрохирургии головного мозга, и может быть использовано для диагностики и лечения внутримозговых новообразований, эпилепсии, гидроцефалии, паркинсонизма, глубинных абсцессов и других заболеваний центральной нервной системы.
В процессе нейрохирургической операции при таких состояниях производится наведение стереотаксического инструмента, имеющего форму канюли, на одну или несколько целевых точек в глубине головного мозга. По достижении канюлей целевой точки мозга в ней производится диагностическое (например, биопсия) или лечебное (деструкция опухоли, электростимуляция подкорковой структуры и т.д.) воздействие. Нацеливание на целевые точки производится на дооперационных томограммах (КТ или МРТ) головного мозга пациента. Введение канюли в мозг во время нейрохирургического вмешательства может производиться при помощи систем оптической безрамной нейронавигации, в оперативную память которой загружаются дооперационные данные КТ, МРТ или ПЭТ пациента в электронном формате (Савелло А.В. Комплексное дифференцированное применение методов пред- и интраоперационной визуализации, нейронавигации и рентгенохирургии на этапе хирургического лечения пациентов с внутричерепными опухолями: автореф. дис. … д-ра мед. наук / А.В. Савелло. - СПб., 2008. - 36 с.).
Известно множество систем для интраоперационной нейрохирургической нейронавигации (например, фирм Medtronic, Brainlab и других) (Pfisterer W.K., Papadopoulos S., Drumm D.A., Smith K., Preul M.C. Fiducial versus nonfiducial neuronavigation registration assessment and considerations of accuracy. Neurosurgery. 2008 Mar; 62 (3 Suppl 1):201-7. Pillai P., Sammet S., Ammirati M. Application accuracy of computed tomography-based, image-guided navigation of temporal bone. Neurosurgery. 2008 Oct; 63 (4 Suppl 2):326-32).
Все они основаны на том, что в оперативной памяти компьютера навигационной системы благодаря загруженным в него дооперационным томограммам создается виртуальная трехмерная модель головного мозга пациента. Все манипуляции производят, как правило, на обездвиженной с помощью фиксирующего устройства голове пациента. Благодаря специальной маркировке головы пациента и инструмента оптические датчики системы нейронавигации позволяют позиционировать стереотаксический инструмент относительно головы, отследить его перемещения в головном мозге и отобразить их на интраоперационном мониторе, на который выведена виртуальная модель головного мозга пациента. Основой для позиционирования инструмента в навигационных системах является референтная рамка, жестко фиксируемая к голове пациента, маркеры которой регистрируются датчиками системы нейронавигации. К этой рамке и производится пространственная «привязка» пространства головы пациента и положения инструмента. Кроме отслеживания перемещений стереотаксического инструмента, программное обеспечение систем нейронавигации позволяет сначала нацелить, а затем ввести инструмент в целевые точки, выбранные на виртуальной модели головного мозга пациента.
Однако способ нацеливания на запланированные точки головного мозга во время нейрохирургической операции средствами известных навигационных систем обладает рядом недостатков:
1. Нацеливание осложняется тем, что персонал, участвующий в операции, непроизвольно может перекрывать поле зрения оптических датчиков, что приводит к необходимости периодической коррекции взаимного положения датчиков с референтной рамкой и инструментом.
2. Нацеливание на внутримозговую мишень и обеспечение нейрохирургического доступа для введения стереотаксического инструмента (т.е. наложение фрезевого отверстия) не могут производиться одновременно, так как оба эти этапа должны выполняться в ограниченном пространстве операционного поля и вблизи него. Следовательно, эти этапы проводятся последовательно друг за другом, что удлиняет время операции.
3. Если во время операции необходимо выполнять воздействия последовательно на нескольких целевых точках мозга, то приходится после воздействия на одну точку (а воздействие может длиться достаточно длительное время) перенацеливать инструмент на операционном столе для его введения в следующую целевую точку и так далее, до проведения воздействий на всех запланированных точках. Для нацеливания на следующую точку тоже требуется определенное время, и выполнение нацеливания одновременно с воздействием на предыдущую целевую точку невозможно, что также увеличивает общую продолжительность операции.
4. Нацеливание производится путем изменения угла наклона стереотаксического инструмента перед его погружением в мозг через фрезевое отверстие (например, при использовании устройств Vertek Precision Aiming Device или Trajectory Guide Kit, которыми комплектуется нейронавигация Medtronic). При этом даже сравнительно небольшие угловые отклонения инструмента от оси нацеливания на внутримозговую мишень могут привести к заметному изменению положения конечной точки введения стереотаксического инструмента по отношению к запланированной целевой точке в глубине мозга. Расхождение между запланированной точкой и истинным положением активного конца стереотаксического инструмента в головном мозге пациента может привести к снижению эффективности операции и повышает риск нежелательных эффектов хирургического вмешательства.
5. Если после проведения нацеливания оказывается, что точку погружения стереотаксического инструмента в мозг нужно сместить в сторону (например, из-за препятствия в виде коркового сосуда), то возникает необходимость повторного нацеливания с перенастройкой всей траектории введения инструмента, которая должна соединять точку погружения и целевую точку.
Предлагаемый нами способ обеспечивает возможность нацеливания инструмента вне операционного стола, что создает предпосылки для преодоления вышеуказанных недостатков.
Технический результат настоящего изобретения заключается в том, что на время наложения фрезевого отверстия или других хирургических манипуляций вне операционного стола с помощью переноса референтной рамки на копию фиксирующего устройства создают виртуальную модель внутримозгового пространства и с помощью направляющего устройства на экране системы нейронавигации осуществляют наведение стереотаксического инструмента на виртуальную внутримозговую мишень, после чего направляющее устройство устанавливают на голову пациента на операционном столе и через фрезевое отверстие осуществляют наведение стереотаксического инструмента на физическую внутримозговую мишень.
Этот результат достигается благодаря тому, что голову пациента закрепляют на операционном столе с помощью фиксирующего устройства. На фиксирующее устройство через адаптер закрепляют референтную рамку и с помощью датчиков навигационной системы, в соответствии с принятым порядком ее использования, производят интраоперационную регистрацию головы пациента. Она заключается в осуществлении электронной привязки референтной рамки к голове и внутримозговому пространству пациента, воспроизведенному в оперативной памяти компьютера навигационной системы благодаря загрузке в нее дооперационных томограмм. В результате, положение референтной рамки однозначно определяет расположение внутримозгового пространства пациента в виртуальной модели его головного мозга. Где бы ни находилась референтная рамка, эта привязка сохраняется. После этого референтную рамку с адаптером переносят на копию фиксирующего устройства, расположенную отдельно от операционного стола. При этом копия фиксирующего устройства благодаря расположенной на ней референтной рамке становится физической основой виртуальной модели головного мозга пациента, созданной в оперативной памяти компьютера навигационной системы. С помощью направляющего устройства, укрепленного к копии фиксирующего устройства, осуществляют наведение стереотаксического инструмента на виртуальную внутримозговую мишень на мониторе экрана навигационной системы. После этого направляющее устройство закрепляют на фиксирующем устройстве, расположенном на голове пациента, и осуществляют наведение стереотаксического инструмента на физическую внутримозговую мишень. Сущность изобретения иллюстрируется следующими чертежами:
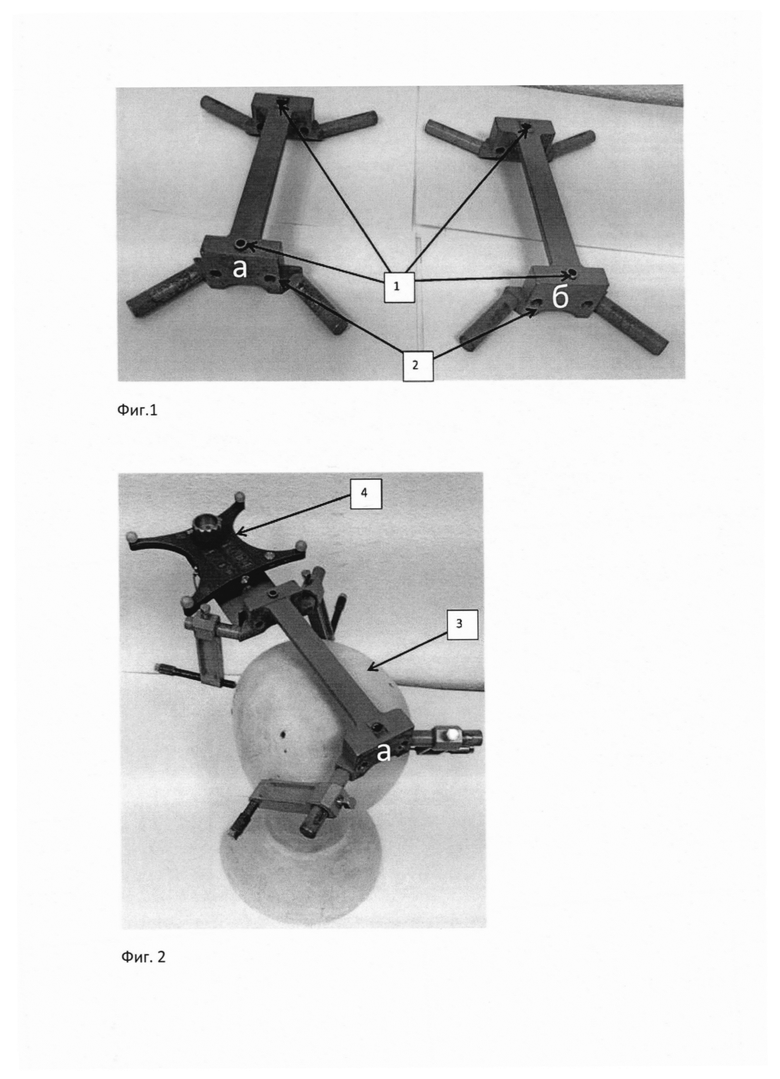
Фиг. 1 - два одинаковых основания фиксирующего устройства (а, б);
Фиг. 2 - устройство, фиксирующее голову пациента, на основании (а) которого укреплена референтная рамка навигационной системы;
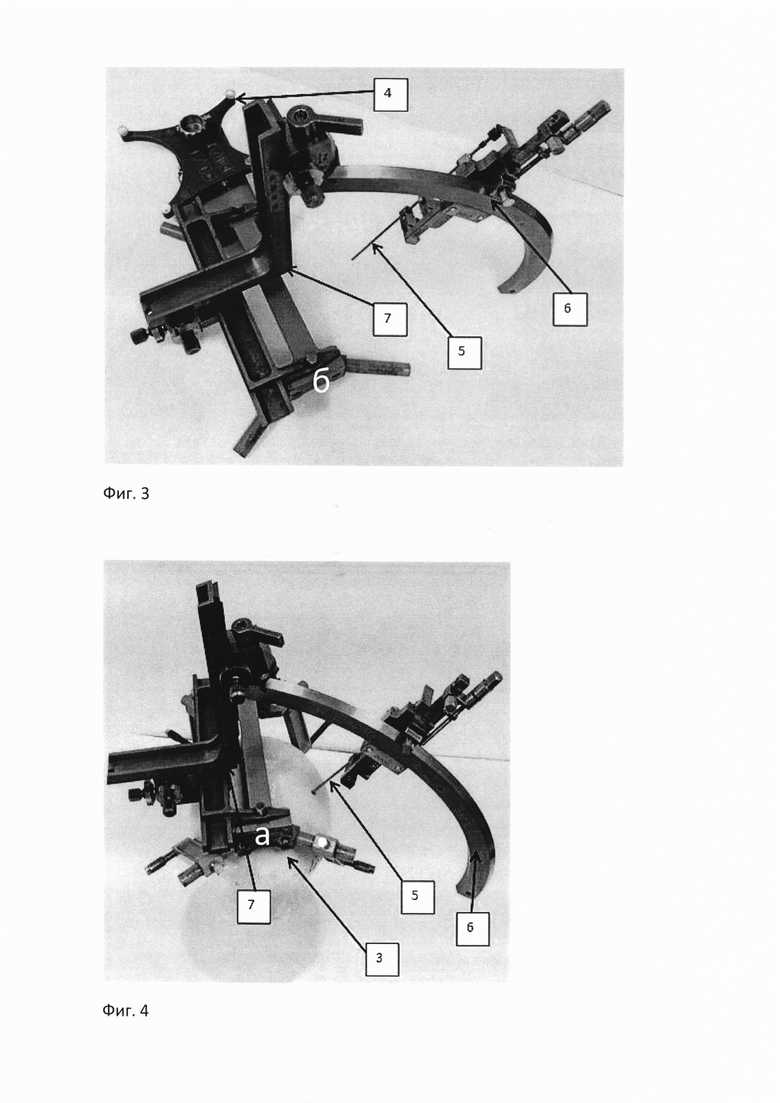
Фиг. 3 - основание фиксирующего устройства (б) с закрепленными на нем референтной рамкой навигационной системы и наводящим устройством;
Фиг. 4 - устройство, фиксирующее голову пациента, на основание (а) которого перенесено направляющее устройство.
Сущность изобретения заключается в следующем.
Пациенту за несколько дней перед операцией выполняют МРТ или КТ головного мозга с получением срезов толщиной 1 мм, и томограммы в электронном формате загружают в память компьютера нейронавигации. На экране навигационной системы на томограммах мозга пациента отмечают целевые точки, в которые планируется ввести стереотаксический инструмент во время операции.
При проведении операции используют две абсолютно идентичные детали, играющие роль фиксирующего устройства, к которым может крепиться направляющее устройство и референтная рамка навигационной системы. В качестве фиксирующих устройств нами были использованы два одинаковых основания стереотаксических манипуляторов «Ореол» (Фиг. 1) (Аничков А.Д., Полонский Ю.З., Низковолос В.Б. Стереотаксические системы. - СПб.: Наука, 2006. - 142 с.).
Оба основания имеют идентично расположенные места крепления (1) для фиксации направляющего устройства манипулятора и два дополнительных места, к которым можно укреплять различные конструкции (2). Одно из двух идентичных оснований (а) непосредственно участвует в операции, второе (б) располагается в операционной на отдельном стерильном столе.
Первое основание при помощи острых винтовых упоров в начале операции жестко фиксируют к голове (3) пациента и к операционному столу. Затем при помощи специального адаптера к основанию крепят референтную рамку навигационной системы (4) (Фиг. 2). Далее производят регистрацию головного мозга пациента в компьютере навигационной системы, направив оптические датчики системы нейронавигации в сторону головы пациента. Таким образом, производится геометрическая привязка пространства головного мозга пациента и основания стереотаксического манипулятора к меткам референтной рамки. Стереотаксический инструмент также регистрируют в навигационной системе.
Затем адаптер, посредством которого крепится референтная рамка к основанию, вместе с рамкой снимают с крепления и в том же положении укрепляют ко второму основанию. Идентичность положения референтной рамки относительно основания манипулятора, фиксирующего голову пациента и основания, расположенного на стерильном столе, играет ключевую роль в реализации предложенного способа и обеспечивается посадкой адаптера на геометрически одинаково расположенные шпонки на обоих основаниях.
Затем камеру навигационной системы перенаправляют с головы пациента на стол, на котором располагается второе основание стереотаксического манипулятора (б). Навигационная система, датчики которой фиксируют референтную рамку, установленную на втором основании, «воспринимает» ее как рамку, зарегистрированную в начале операции в качестве установленной на голове пациента. Это значит, что теперь именно второе основание становится материальной основой для виртуальной модели головного мозга пациента, созданной в памяти компьютера навигационной системы.
Поэтому любые перемещения предметов, снабженных маркерами навигационной системы и зарегистрированных в навигационной системе, по отношению к референтной рамке на втором основании, будут отображаться на экране навигационной системы как перемещения по отношению к референтной рамке на голове пациента. Соответственно, на экране эти перемещения будут отслеживаться в качестве перемещений в «привязанном» к этой рамке пространстве головного мозга пациента. Это и обеспечивает возможность нацеливания стереотаксического инструмента на запланированные целевые точки мозга, перемещая его в пространстве по отношению к его референтной рамке.
После перенаправления датчиков навигационной системы в сторону второго основания на ее экране появляются изображения головного мозга пациента и зарегистрированных в системе инструментов, находящихся в пространстве второго основания. Перемещения стереотаксического инструмента осуществляют при помощи направляющего устройства манипулятора системы «Ореол» (Аничков А.Д., Полонский Ю.З., Низковолос В.Б. Стереотаксические системы. - СПб.: Наука, 2006. - 142 с.), который съемным образом крепится ко второму основанию (б) в строго определенном положении. При этом инструмент (5) устанавливают в направляющее устройство в положении введения инструмента до упора в ограничитель, что соответствует положению активного конца стереотаксического инструмента в центре изоцентрической дуги (6), которой снабжено направляющее устройство (7) (Фиг. 3). Благодаря тому, что направляющее устройство обеспечивает поступательные перемещения инструмента в трех взаимно перпендикулярных направлениях, их отслеживают на экране навигационной системы в трех плоскостях сечения изображения головного мозга пациента - горизонтальной, фронтальной и сагиттальной. Перемещения инструмента в трех плоскостях производят до совмещения на экране кончика изображения инструмента с запланированной целевой точкой мозга, отображенной на всех трех плоскостях сечения головного мозга пациента, выведенных на экран. Полученное положение направляющего устройства фиксируется.
Далее направляющее устройство (7), нацеленное на внутримозговую мишень, отделяют от второго основания (б), переносят на первое основание (а), установленное на голове пациента (3). После этого стереотаксический инструмент (5) устанавливают в направляющее устройство и погружают в мозг до упора в ограничитель через фрезевое отверстие, которое было создано ассистентом хирурга на своде черепа пациента одновременно с нацеливанием манипулятора на отдельном столе, производимым хирургом. Если траектория введения инструмента не совпадает с положением фрезевого отверстия на голове, ее корректируют изменением положения инструмента на изоцентрической дуге (6) (Фиг. 4) и поворотом самой дуги, при этом конечное положение активного конца инструмента при его упоре в ограничитель, соответствующее пространственному положению целевой точки, не меняется. После достижения активным концом стереотаксического инструмента целевой точки головного мозга пациента в ней производят запланированное воздействие. Во время осуществления воздействия с помощью второго направляющего устройства на фантоме осуществляется нацеливание на следующую целевую точку головного мозга пациента, запланированную для этой операции. При этом после окончания воздействия, сменив направляющие устройства на основании, укрепленном на голове пациента, возможно сразу производить воздействие на следующей целевой точке, поскольку нацеливание на нее уже произведено на втором основании. После окончания воздействий на всех целевых точках головного мозга пациента основание снимают с головы пациента, операционную рану на голове пациента ушивают в соответствии с общепринятой нейрохирургической методикой.
Сущность метода иллюстрируется клиническим примером.
Пациент X., 1974 г.р., поступил в нейрохирургическое отделение ИМЧ РАН с жалобами на головную боль и однократно случившийся генерализованный судорожный припадок с потерей сознания. В неврологическом статусе: сознание ясное, без очаговой и менингеальной неврологической симптоматики. По данным МРТ головного мозга, в глубинных отделах левой височной доли с примыканием к латеральной щели мозга отмечается наличие внутримозгового новообразования овоидной формы размерами 3,3×2,1×1,9 см, тесно прилегающее передним и верхним краями к стволу средней мозговой артерии, не накапливающее контрастное вещество, без признаков масс-эффекта. По данным ПЭТ головного мозга, новообразование интенсивно накапливает радиофармпрепарат 11C-метионин, индекс накопления 2,1. Предварительный диагноз: астроцитома левой височной доли, судорожный синдром.
В связи с глубинным расположением новообразования, его тесным прилеганием к крупному церебральному сосуду - средней мозговой артерии, а также с нахождением в доминантном полушарии вблизи речевой зоны, у пациента имеются противопоказания к хирургическому удалению опухоли из-за высокого риска неврологических осложнений операции. Принято решение о проведении многопозиционной прицельной криодеструкции опухоли с доступом через фрезевое отверстие. МРТ пациента в электронном формате DICOM загружена в навигационную систему Medtronic StealthStationS7, средствами нейронавигации выполнено планирование четырех траекторий введения стереотаксического инструмента в целевые точки опухоли. 08.12.2015 г. выполнена операция - многопозиционная стереотаксическая криодеструкция опухоли левой височной доли с использованием нейронавигации, по вышеописанной методике. После регистрации головы пациента и второго основания стереотаксического манипулятора датчиками навигационной системы криозонд последовательно нацелен на четыре целевые точки в пределах опухоли и введен в целевые точки через фрезевое отверстие в левой височной области головы пациента. Под местной анестезией проведена последовательная криодеструкция в намеченных зонах опухоли. Продолжительность операции составила около полутора часов и определялась в основном длительностью криоэкспозиции в целевых точках, поскольку нацеливание на мишени осуществлялось вне операционного стола, одновременно с работой в операционном поле, и не увеличивало длительность хирургического вмешательства. После операции - пациент в ясном сознании, без очаговой неврологической симптоматики, на контрольной КТ головного мозга сразу после операции - состояние после криодеструкции опухоли, осложнений не выявлено. Отмечено гладкое течение послеоперационного периода, после снятия швов пациент выписан на амбулаторное лечение.
Предлагаемый способ по сравнению с известными способами имеет следующие преимущества:
1. Существенно сокращается суммарное время операции, особенно при большом количестве внутримозговых мишеней, за счет возможности выполнения нацеливания на виртуальной модели, вне операционного стола, при наличии второго направляющего устройства, одновременно с другими манипуляциями в области операционного поля (сокращение времени).
2. Фиксирующее устройство, на основании которого строится виртуальная модель вне операционного стола, представляет собой сравнительно компактную деталь без дополнительных объектов, поэтому нацеливание на нем с использованием оптической нейронавигации выполняется без помех. Тогда как нацеливание оптической нейронавигации в пределах операционного поля зачастую сталкивается с тем, что целый ряд объектов (головы хирурга и операционной сестры, нейрохирургические инструменты, операционные простыни, огораживающие операционное поле) могут препятствовать одновременной визуализации референтной рамки и маркеров инструментов датчиками навигационной системы, что вынуждает периодически менять положение датчиков (повышение удобства при работе).
3. Возможность задействовать для нацеливания инструмента направляющее устройство с изоцентрической дугой позволяет при работе в операционном поле легко менять направление траектории введения стереотаксического инструмента к целевой точке мозга без необходимости перенацеливания (удобство и сокращение времени).
4. Нацеливание инструмента на целевые точки перемещением его в трех взаимно перпендикулярных направлениях, предлагаемое в данном методе, позволяет более точно нацелить инструмент на целевую точку по изображениям головного мозга пациента в трех плоскостях сечения, отображаемым на экране нейронавигации (повышение точности).
Предлагаемый способ апробирован при выполнении 34 операций биопсии и многопозиционной криодеструкции опухолей головного мозга в клинике ИМЧ РАН в 2015 г. Предварительно точность нацеливания на мишени, обеспечивающаяся предлагаемым методом, подтверждена при помощи фантомных испытаний на точечных объектах, моделирующих целевые точки головного мозга. Метод может быть реализован с использованием разного нейрохирургического оборудования, например навигационных систем MedtronicStealthStationS7 и BrainlabKick, рамных стереотаксических манипуляторов ОРЕОЛ, CRW и так далее. В нейрохирургической клинике метод может быть использован при проведении операций при внутримозговых опухолях, эпилепсии, гидроцефалии, абсцессах головного мозга, внутримозговых гематомах и другой патологии, требующей быстрого прицельного введения инструмента в целевые точки головного мозга.
Литература
1. Савелло А.В. Комплексное дифференцированное применение методов пред- и интраоперационной визуализации, нейронавигации и рентгенохирургии на этапе хирургического лечения пациентов с внутричерепными опухолями: автореф. дис. … д-ра мед. наук / А.В. Савелло. - СПб., 2008. - 36 с.
2. Pfisterer W.K., Papadopoulos S., Drumm D.A., Smith K., Preul M.C. Fiducial versus nonfiducial neuronavigation registration assessment and considerations of accuracy. Neurosurgery. 2008 Mar; 62 (3 Suppl 1):201-7.
3. Pillai P., Sammet S., Ammirati M. Application accuracy of computed tomography-based, image-guided navigation of temporal bone. Neurosurgery. 2008 Oct; 63 (4 Suppl 2):326-32.
4. Аничков А.Д., Полонский Ю.З., Низковолос В.Б. Стереотаксические системы. - СПб.: Наука, 2006. - 142 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАЛОИНВАЗИВНОГО УДАЛЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ВЕЩЕСТВА ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ НЕЙРОНАВИГАЦИИ И НАПРАВИТЕЛЯ | 2023 |
|
RU2814763C1 |
| СПОСОБ МАРКИРОВКИ ГОЛОВЫ ПАЦИЕНТА ПРИ РАБОТЕ С ИНТРАОПЕРАЦИОННОЙ БЕЗРАМНОЙ НЕЙРОНАВИГАЦИЕЙ | 2015 |
|
RU2607404C2 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ВИСОЧНОЙ ЭПИЛЕПСИИ | 2017 |
|
RU2646748C1 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ ГОЛОВНОГО МОЗГА | 2004 |
|
RU2257178C1 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ | 1997 |
|
RU2130759C1 |
| НЕЙРОНАВИГАЦИОННАЯ ЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2004 |
|
RU2290055C2 |
| Способ определения локализации фокального эпилептогенного очага при проведении нейрохирургических вмешательств | 2024 |
|
RU2826782C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ГЛИАЛЬНЫХ НОВООБРАЗОВАНИЙ ГОЛОВНОГО МОЗГА | 2008 |
|
RU2388415C2 |
| СПОСОБ ЛЕЧЕНИЯ ГЛИАЛЬНЫХ ОПУХОЛЕЙ ГОЛОВНОГО МОЗГА СУПРАТЕНТОРИАЛЬНОЙ ЛОКАЛИЗАЦИИ | 2013 |
|
RU2533032C1 |
Изобретение относится к медицине, а именно к нейрохирургии головного мозга, и может быть использовано для диагностики и лечения внутримозговых новообразований, эпилепсии, гидроцефалии, паркинсонизма, глубинных абсцессов и других заболеваний центральной нервной системы. Способ заключается в том, что осуществляют закрепление головы пациента с помощью фиксирующего устройства. Закрепление относительно фиксирующего устройства референтной рамки с реперными точками. Осуществление электронной оптической привязки референтной рамки к полученному с помощью томографических данных внутримозговому пространству пациента. Референтную рамку переносят с головы пациента на копию фиксирующего устройства, расположенную вне операционного стола. На нем же закрепляют направляющее устройство. Получают виртуальную модель внутримозгового пространства. Осуществляют наведение стереотаксического инструмента на виртуальную внутримозговую мишень. Затем направляющее устройство переносят на устройство, фиксирующее голову пациента. Через фрезевое отверстие осуществляют подведение стереотаксического инструмента к внутримозговой мишени. Способ позволяет сократить продолжительность хирургического вмешательства, повысить точность нацеливания и улучшить результаты хирургического лечения пациентов. 4 ил.
Способ наведения стереотаксического инструмента на внутримозговую мишень, включающий закрепление головы пациента с помощью фиксирующего устройства, закрепление относительно фиксирующего устройства референтной рамки с реперными точками, осуществление электронной оптической привязки референтной рамки к полученному с помощью томографических данных внутримозговому пространству пациента, отличающийся тем, что референтную рамку переносят с головы пациента на копию фиксирующего устройства, расположенную вне операционного стола, на нем же закрепляют направляющее устройство, получают виртуальную модель внутримозгового пространства, осуществляют наведение стереотаксического инструмента на виртуальную внутримозговую мишень, затем направляющее устройство переносят на устройство, фиксирующее голову пациента, и через фрезевое отверстие осуществляют подведение стереотаксического инструмента к внутримозговой мишени.
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ ГОЛОВНОГО МОЗГА | 2004 |
|
RU2257178C1 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ | 1997 |
|
RU2130759C1 |
| СПОСОБ СТЕРЕОТАКСИЧЕСКОГО НАВЕДЕНИЯ | 1995 |
|
RU2121296C1 |
| US 4228799 A, 21.10.1980 | |||
| DE 19906094 A1, 07.09.2000 | |||
| ХОЛЯВИН А.И | |||
| Cтереотаксическое мрт-наведение в хирургии психических расстройств: метод локализационных маршрутов, Неврологический вестник, 2007, том ХХХIХ, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |

