Изобретение относится к устройству для контроля заданного уровня или для определения плотности или вязкости измеряемой среды в емкости. Измеряемая среда может представлять собой жидкую среду, пену или твердую среду.
Устройство содержит колебательный узел, приемо-приводной блок и обрабатывающий блок. Колебательный узел в зависимости от случая применения размещен на высоте заданного уровня или позиционирован так, что погружен в измеряемую среду на определенную глубину. Далее предусмотрено электронное устройство обратной связи, которое подает приемо-приводному блоку сигналы для возбуждения колебательного узла. Устройство обратной связи состоит предпочтительно из устройства возбуждения основных волн, уже известного из уровня техники. Здесь следует, в частности, сослаться на ставшее известным устройство возбуждения основных волн LIQUIPHANT М.
С помощью изменения частоты и/или амплитуды колебания колебательного узла обрабатывающий блок определяет достижение заданного уровня. В случае изменения плотности или вязкости обрабатывающий блок определяет соответственно плотность или вязкость измеряемой среды в зависимости от изменения колебания колебательного узла.
Уже известны устройства с колебательным узлом, так называемые вибрационные детекторы, для детектирования или контроля уровня среды в емкости. Колебательный узел представляет собой, по меньшей мере, один колебательный стержень, закрепленный на мембране. Колебания мембраны возбуждают посредством электромеханического преобразователя, например пьезоэлектрического элемента. Вследствие колебаний мембраны закрепленный на ней колебательный узел также совершает колебания. Вибрационные детекторы описанного выше рода изготавливаются и распространяются заявителем под названием LIQUIPHANT.
Выполненные в виде уровнемеров вибрационные детекторы используют тот эффект, что частота и амплитуда колебаний зависят от соответствующей степени покрытия колебательного узла: в то время как колебательный узел на воздухе может совершать свои (резонансные) колебания свободно и без демпфирования, он испытывает изменение частоты и амплитуды, т.е. рассогласование, как только будет частично или полностью погружен в измеряемую среду. С помощью заданного изменения частоты (обычно для определения уровня детектируют частоту) можно, следовательно, сделать однозначный вывод о достижении заданного уровня среды в емкости. Уровнемеры используют, кстати, главным образом в качестве предохранителей от перелива или в целях защиты от холостого хода насоса.
Кроме того, на частоту колебания колебательного узла влияет также плотность среды. Поэтому при постоянной степени покрытия существует функциональная связь между изменением частоты и плотностью среды, так что вибрационные детекторы наилучшим образом пригодны для определения как уровня, так и плотности.
На практике в целях контроля и обнаружения уровня или плотности или вязкости среды в емкости воспринимают колебания мембраны и посредством, по меньшей мере, одного пьезоэлектрического элемента преобразуют их в электрические ответные сигналы. Электрические ответные сигналы обрабатывают затем в обрабатывающем блоке. В случае определения уровня блок обработки контролирует частоту и/или амплитуду колебаний колебательного узла и сигнализирует о состоянии «датчик покрыт» или «датчик не покрыт», как только измеренные значения будут выше или ниже заданного опорного значения. Соответствующее сообщение обслуживающему персоналу может осуществляться оптическим и/или акустическим путем. В качестве альтернативы или дополнительно происходит процесс коммутации; так, например, открывается или закрывается приточный или сливной клапан на емкости.
Из WO 02/31471 А2 известно, кроме того, устройство для измерения и/или контроля вязкости измеряемой среды. Устройство состоит и здесь из колебательного узла, закрепленного на мембране, приемо-приводного блока и регулирующеобрабатывающего блока. Регулирующеобрабатывающий блок с помощью кривой частота-фаза определяет вязкость измеряемой среды. В частности, регулирующеобрабатывающий блок устанавливает два достаточно отличных друг от друга фазовых значения, определяет соответствующие фазам частоты или соответствующее изменение частоты колебаний колебательного узла, сравнивает полученное изменение частоты с хранящимися в памяти заданными значениями и определяет, таким образом, вязкость измеряемой среды.
В основе изобретения лежит задача создания устройства для измерения уровня и/или плотности или вязкости, которое имело бы постоянную фазовую характеристику по большой ширине полосы частот (рабочий диапазон).
Эта задача решается за счет того, что в колебательном контуре, образованном колебательным узлом и электронным устройством обратной связи, предусмотрен микропроцессор, который по заданной ширине полосы частот корректирует фазу электронного устройства обратной связи таким образом, что сумма фаз электронного устройства обратной связи и микропроцессора следует за заданной функцией f(ν).
Электронное устройство обратной связи представляет собой, например, аналоговое электронное устройство обратной связи, используемое в предлагаемом и распространяемом заявителем LIQUIPHANT М. Изобретение не ограничено этой особой формой электронного устройства обратной связи.
За счет интеграции согласно изобретению микропроцессора в колебательный контур можно повлиять на вибрационный детектор «интеллигентным» образом так, чтобы он имел в растянутом рабочем диапазоне постоянную фазовую характеристику. Кроме того, он может быть произвольно согласован с самыми разными условиями и требованиями к месту измерений. Далее устройство согласно изобретению в качестве так называемого мультипеременного датчика можно использовать при определении уровня так же, как при измерении вязкости или плотности.
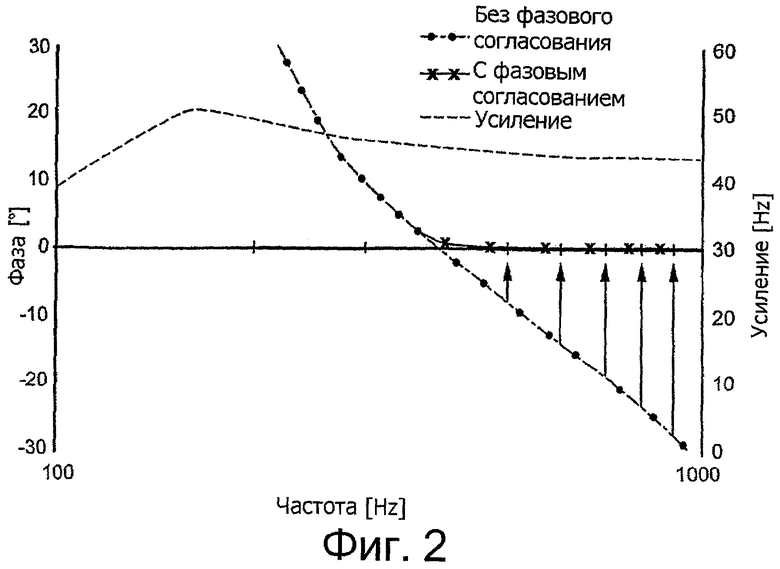
Согласно одному предпочтительному усовершенствованию устройства, согласно изобретению ширина полосы частот лежит предпочтительно в пределах 300-1500 Гц. Электронное устройство обратной связи имеет поэтому задачу в случае выхода из строя приемо-приводного блока вырабатывать сигналы посредством свойственной электронному устройству обратной связи резонансной частоты (см. амплитудную характеристику на фиг.2). Эта частота лежит вне ширины полосы частот мультипеременного датчика.
Одно благоприятное выполнение устройства согласно изобретению предусматривает, что микропроцессору придан блок памяти, в котором хранятся корректировочные значения фазы в зависимости от частоты колебания. В частности, корректировочные значения фазы хранятся в блоке памяти в виде таблицы или в виде одной или нескольких функций. Последний случай возникает тогда, когда учитываются дополнительные величины процесса, влияющие на фазовую характеристику электронного устройства обратной связи, например температура в месте измерения.
Для обеспечения оптимальной работы устройства согласно изобретению микропроцессор заботится, например, о том, чтобы во всем рабочем диапазоне функция f(ν) принимала постоянное значение. Постоянное значение может составлять, например, 0°. В зависимости от применения сумма фаз электронного устройства обратной связи и микропроцессора может иметь также отличное от нуля постоянное значение. В принципе, постоянная, представляющая сумму фаз, может принимать любое значение между -180° и +180°.
Благодаря этому выполнению можно, например, реагировать на изменившиеся за счет пены условия в месте измерения. Точно так же можно отличить пену при определенных условиях от жидкой измеряемой среды. Кроме того, произвольно изменяющаяся фаза, как уже сказано выше, является обязательным условием измерения вязкости.
Рассмотрим следующие примеры. Выключатель предельного значения устанавливают в качестве защиты от перелива в емкости, в которой хранится жидкая, сильно пенящаяся измеряемая среда. В таком случае выключатель предельного значения должен подавать коммутирующий сигнал уже тогда, когда пена вступает в контакт с колебательным узлом, а не тогда, когда колебательный узел погружен в жидкую измеряемую среду. Для обеспечения срабатывания датчика предельного уровня на пену сумму фаз электронного устройства обратной связи и микропроцессора устанавливают на отличное от нуля значение, например на +50°. Далее можно осуществить оптимизированное согласование на случай, если выключатель предельного значения используют в качестве защиты от холостого хода, например на -20°. В таком случае коммутационное положение выключателя предельного значения устанавливают так, чтобы он игнорировал пену.
Согласно одному благоприятному усовершенствованию устройства, согласно изобретению предусмотрен блок ввода и индикации, в котором может быть задана функция f(ν). Таким образом, можно в зависимости от применения обеспечить измерение плотности, вязкости или пены без необходимости каких-либо регулировок компонентов электронной части. Понятно, что передача данных вместо ввода на месте может происходить, например, через полевую шину.
Предпочтительно электронное устройство обратной связи подает микропроцессору периодический, преимущественно прямоугольный сигнал, используемый микропроцессором для определения корректировочного значения фазы. Этим достигается то, что идущий от микропроцессора сигнал не приходится подвергать аналого-цифровому преобразованию и отфильтровывать в частотном диапазоне. Напротив, идущий от микропроцессора сигнал обрабатывается во временном диапазоне. По этой причине может использоваться недорогой микропроцессор, поскольку отсутствует необходимость в аналого-цифровом преобразовании со связанной с затратами на вычисления фильтрацией в частотном диапазоне.
В частности, микропроцессор выполняет следующие операции. На первой операции микропроцессор определяет с помощью боковых сторон, например с помощью возрастающих боковых сторон, прямоугольного входного сигнала частоту колебательного контура; затем микропроцессор присваивает полученной частоте соответствующее, хранящееся в памяти корректировочное значение фазы; на третьей операции микропроцессор обеспечивает подачу выходного сигнала с полученной на второй операции корректированной фазой. Тем самым, происходит регулирование в колебательном контуре до задаваемой или заданной фазовой характеристики почти в реальном времени.
Далее предложено, что микропроцессор определяет частоту в течение нескольких периодов входного сигнала и осуществляет оценку частоты. На практике оказалось, что микропроцессор в зависимости от качества сигнала в течение множества периодов не всегда определяет одну и ту же частоту. Здесь в дело вступает оценка частоты. В случае если, например, по причинам техники приложения, целесообразно принудить колебательный узел совершать меньшие частоты, то микропроцессор может с помощью измеренных последними периодов выдавать наименьшую из полученных частот. Само собой, можно за счет предварительного задания значений в микропроцессоре учитывать и другие обстоятельства техники приложения. Можно, например, в течение нескольких периодов осуществить определение частоты, или выбирают наибольшую определенную частоту и для усиления подают к поясняемому ниже бустеру.
Согласно одному предпочтительному усовершенствованию устройства согласно изобретению предусмотрена усилительная схема (бустер), через которую выходные сигналы микропроцессора подают к приводному блоку колебательного узла.
Одно предпочтительное выполнение устройства, согласно изобретению предусматривает, что микропроцессор дополнительно выполняет задачи обрабатывающего блока и определяет достижение заданного уровня или определяет и сигнализирует вязкость, плотность или пенообразование измеряемой среды.
Одно предпочтительное усовершенствование устройства, согласно изобретению предусматривает, что электронное устройство обратной связи подает микропроцессору сигнал, пропорциональный по амплитуде входному сигналу. Это выполнение важно тогда, когда измеряемая среда представляет собой твердую среду. Так, например, с помощью предлагаемого и распространяемого заявителем прибора SOLIPHANT обрабатывают изменение амплитуды, а не частоты в целях обнаружения и/или контроля уровня.
Кроме того, предусмотрен датчик для измерения величины процесса, например температурный датчик, который предоставляет микропроцессору информацию о величине процесса, например температуре, а микропроцессор учитывает влияние величины процесса при подготовке корректировочного значения для фазы.
Изобретение более подробно поясняется с помощью прилагаемых чертежей, на которых изображают:
- фиг.1: блок-схему устройства, согласно изобретению;
- фиг.2: в графическом виде характеристику фазы, корректированной фазы и усиления в зависимости от частоты.
На фиг.1 изображена блок-схема устройства, согласно изобретению. Это устройство представляет собой выключатель предельного значения. Изображенное на фиг.1 устройство 1 пригодно, само собой, как сказано выше, также для определения плотности или вязкости находящейся в емкости измеряемой среды. Емкость и измеряемая среда на фиг.1 не показаны. В то время как в случае определения уровня колебательный узел 2 только при достижении детектированного предельного уровня погружен или не погружен в измеряемую среду, он в целях контроля или определения плотности или вязкости должен быть в непрерывном контакте с измеряемой средой до заданной глубины погружения. Емкость может представлять собой, конечно, также трубу, по которой протекает среда.
Датчик содержит корпус, закрытый в своей направленной в емкость концевой зоне мембраной 5. Мембрана 5 зажата своей краевой зоной в корпусе. На мембране 5 закреплен направленный в емкость колебательный узел 2. В изображенном случае колебательный узел 2 имеет форму камертона, т.е. содержит два отстоящих друг от друга, закрепленных на мембране 5 и направленных в емкость колебательных стержня 3, 4.
Мембрана 5 приводится приемо-приводным блоком 6 в колебания с заданной частотой возбуждения. Приемо-приводной блок 6 представляет собой, например, стапельный или биморфный привод. Оба вида пьезоэлектрических приводов достаточно известны из уровня техники, так что здесь от их описания можно отказаться. Вследствие колебаний мембраны 5 колебательный узел 2 также совершает колебания, причем частота колебаний различная, если колебательный узел 2 находится в контакте с мембраной и при колебании масса измеряемой среды также должна двигаться, или если колебательный узел 2 может колебаться свободно и без контакта с измеряемой средой.
Пьезоэлектрические элементы изменяют свои размеры (толщина, диаметр) в зависимости от приложенной в направлении поляризации разности напряжений. Если приложено переменное напряжение, то изменяется толщина: увеличивается толщина - уменьшается диаметр пьезоэлектрического элемента, уменьшается толщина - соответственно увеличивается диаметр пьезоэлектрического элемента.
На основе этой колебательной характеристики пьезоэлектрического элемента разность напряжений вызывает прогиб зажатой в корпусе мембраны 5. Расположенные на мембране 5 колебательные стержни колебательного узла 2 совершают вследствие колебаний мембраны 5 встречные колебания вокруг своей продольной оси. Встречные колебания имеют то преимущество, что оказываемые каждым колебательным стержнем 3,4 на мембрану переменные усилия взаимоустраняются. В результате этого минимизируется механическая нагрузка на место зажима, так что на корпус почти не передается колебательная энергия.
Механическая колебательная система, образованная приемо-приводным блоком 6, мембраной 5 и колебательным узлом 2, включена в колебательный контур 7. Помимо механической колебательной системы колебательный контур 7 содержит также электрический компонент, реализуемый большей частью электронным устройством 9 обратной связи. Электронное устройство 9 обратной связи может быть выполнено, например, так, как оно предлагается и распространяется заявителем под названием LIQUIPHANT М. Электронное устройство 9 обратной связи выдает периодические сигналы, в частности прямоугольные сигналы, которые подаются через бустер (усилительную схему) к приемо-приводному блоку 6 и передаются там на мембрану 5. Затем мембрана 5 со смонтированным колебательным узлом 2 колеблется с заданной частотой.
В колебательный контур 7 интегрирован также микропроцессор 8. Этот микропроцессор 8 корректирует в качестве «интеллектуального» звена фазу прямоугольных сигналов в зависимости от частоты. Соответствующее данному измеренному значению частоты корректировочное значение фазы хранится в блоке 10 памяти. На корректировочное значение фазы могут влиять также другие параметры, например температура. Поэтому дополнительно предусмотрен температурный датчик 13, который предоставляет информацию о температуре в месте измерения или в зоне электронного устройства обратной связи.
Подаваемый к микропроцессору 8 входной сигнал (In) не подвергается аналого-цифровому преобразованию и не фильтруется затем в частотном диапазоне, а обрабатывается во временном диапазоне. Для этого микропроцессор 8 выполняет следующие операции:
- на первой операции, например с помощью возрастающих боковых сторон прямоугольного входного сигнала определяется частота колебательного контура;
- на второй операции определяется соответствующее полученной частоте корректировочное значение фазы;
- на третьей операции вырабатывается выходной сигнал, имеющий полученную на второй операции корректированную фазу. Этот корректированный по фазе сигнал усиливается в бустере 11 и запускает приемо-приводной блок 6.
При случае микропроцессор выполняет помимо корректировки фазы также корректировку амплитуды. За счет этого происходит оценка частоты для дальнейшего «интеллектуального» влияния. Далее предусмотрено, что (аналоговое) электронное устройство 9 обратной связи подает микропроцессору 8 сигнал, пропорциональный по амплитуде входному сигналу (In).
Предусмотрен блок ввода и индикации 12, в котором может быть задана функция f(ν). Таким образом, можно в зависимости от применения обеспечить измерение плотности, вязкости или пены без необходимости каких-либо регулировок компонентов электронной части. Передача данных вместо ввода на месте может происходить, например, через полевую шину.
На фиг.2 графически изображена характеристика фазы и корректированной фазы в зависимости от частоты. Сплошной точечный граф указывает фазу в зависимости от частоты без корректировки фазы микропроцессором 8. Сплошная линия с крестиками характеризует фазу в зависимости от частоты при фазовом согласовании микропроцессором 8. За счет корректировки фазы в данном случае достигается то, что колебания имеют по всему рабочему диапазону постоянную фазовую характеристику. В данном случае корректировка фазы происходит до 0°.
Далее микропроцессор 8 осуществляет усиление выходных сигналов, причем в данном случае усиление в рабочем диапазоне также отрегулировано до постоянного значения.
Корректировочные значения фаз в зависимости от частоты хранятся, согласно одному предпочтительному усовершенствованию устройства, согласно изобретению в виде таблицы или функции в блоке 10 памяти.
Вместо хранящихся в памяти корректировочных значений фаз может происходить также определение в режиме «он-лайн» оптимальных корректировочных значений фаз, согласованных с фактически господствующими условиями на месте измерения. Это изображено на фиг.1 обозначением (Ref) и штриховыми линиями. С помощью сравнения фазы входного сигнала (In) и фазы выходного сигнала электронного устройства 9 обратной связи можно определить актуальное и, тем самым, оптимальное корректировочное значение фазы. Благодаря этому можно дополнительно повысить надежность и точность устройства, согласно изобретению.
Изобретение относится к устройству для контроля заданного уровня в емкости. Сущность: устройство для контроля заданного уровня в емкости, содержащее колебательный узел, приемо-приводной блок и обрабатывающий блок. Вибрационный детектор может использоваться также в качестве датчика вязкости или плотности. Для создания мультипеременного датчика в колебательном контуре, образованном колебательным узлом и электронным устройством обратной связи, предусмотрен микропроцессор, который по заданной ширине полосы частот корректирует фазу электронного устройства обратной связи таким образом, что сумма фаз электронного устройства обратной связи и микропроцессора следует за заданной функцией f(ν). Технический результат: создание устройства для измерения уровня, которое имело бы постоянную фазовую характеристику по большой ширине полосы частот (рабочий диапазон). 13 з.п. ф-лы, 2 ил.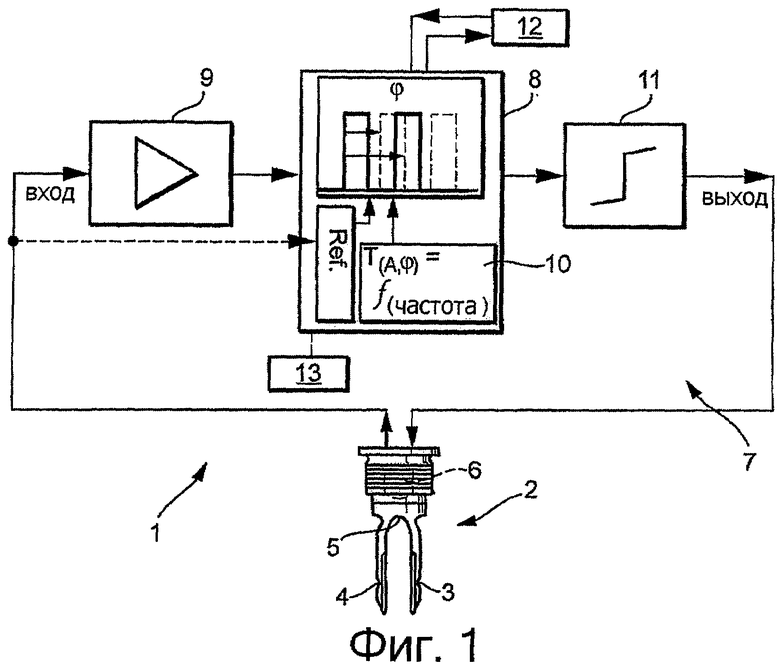
| US 5837885 А, 17.11.1998 | |||
| US 6236322 B1, 22.05.2001 | |||
| US 6044694 А, 04.04.2000 | |||
| WO 9726512 A1, 24.07.1997. |

