Изобретение относится к способу и устройству для определения и/или контроля уровня среды в емкости или определения плотности среды в емкости в соответствии с ограничительной частью п.1 или 10 формулы изобретения.
Известны устройства, содержащие по меньшей мере один вибрационный элемент, так называемый вибрационный детектор, для определения или контроля уровня среды в емкости. Вибрационный элемент представляет собой обычно по меньшей мере один вибрационный стержень, закрепленный на мембране. Посредством электромеханического преобразователя, например пьезоэлектрического элемента, мембрана приводится в колебания. Вследствие колебаний мембраны колебания совершает и закрепленный на ней вибрационный элемент.
Вибрационные детекторы, выполненные в виде приборов измерения уровня заполнения, используют эффект, при котором частота и амплитуда колебания зависят от степени покрытия вибрационного элемента: если на воздухе вибрационный элемент может совершать колебания свободно и без затухания, то при его частичном или полном погружении в среду частота и амплитуда колебаний меняются. Следовательно, на основании заданного изменения частоты (обычно частоту замеряют) можно однозначно сделать вывод о достижении заданного уровня среды в емкости. Приборы для измерения уровня заполнения используются главным образом в целях предупреждения переполнения или холостой работы насоса.
Кроме того, затухание колебаний вибрационного элемента зависит от плотности среды. Поэтому при постоянной степени покрытия существует функциональная зависимость от плотности среды, вследствие чего наиболее приемлемыми для определения уровня заполнения и плотности являются вибрационные детекторы. На практике для контроля и определения уровня заполнения или плотности среды в емкости принимают колебания мембраны и преобразуют их по меньшей мере одним пьезоэлектрическим элементом в принимаемые электрические сигналы.
Затем принятые электрические сигналы обрабатываются в блоке обработки. В случае определения уровня заполнения блок обработки сигналов контролирует частоту и/или амплитуду колебаний вибрационного элемента и сигнализирует о состоянии: "Датчик перекрыт" или "Датчик не перекрыт" в том случае, когда измеренные величины оказываются меньше или больше заданной контрольной величины. Соответствующее сообщение передается обслуживающему персоналу оптически и/или акустически. В качестве альтернативы или дополнительно применяется процесс коммутирования, например открывается или закрывается питательный или спускной клапан.
Указанные выше приборы для измерения уровня заполнения или плотности в большом количестве применяются в отраслях промышленности, например в химической, пищевой, и при водоподготовке. Набор контролируемых загружаемых продуктов включает в себя начиная от воды, йогурта, красок и лаков до высоковязких продуктов, таких как, например, мед, или до интенсивно пенящихся продуктов, таких как пиво.
Трудности при измерении уровня заполнения или плотности с применением вибрационных детекторов вызваны тем, что отсутствует однозначная зависимость между изменением частоты колебаний и степенью покрытия или плотностью среды. Существенное возмущающее воздействие, которое, как и согласование с массой среды, проявляется в смещении резонансной частоты, вызывается изменением массы вибрационного узла. Изменение массы происходит как из-за образования осадка, т.е. осаждения среды на вибрационном узле, так и вследствие коррозии вибростержней. В зависимости от вида и степени изменения массы здесь возможно чрезвычайно нежелательное явление, при котором датчик постоянно будет сообщать: "Перекрыто" или "Не перекрыто" и тем самым о достижении заданного уровня заполнения, хотя предельный уровень заполнения и не достигнут. Аналогичное явление имеет место и при измерении плотности: замеряется и визуализируется ложная плотность среды.
В основу изобретения положена задача: предложить способ и устройство, позволяющие надежное определение и/или контроль уровня заполнения или плотности среды.
Задача, касающаяся способа, решается в результате того, что анализируют по меньшей мере первый и второй типы колебаний вибрационного узла и что на основе анализа типов колебаний определяют изменение массы вибрационного узла. Хотя ниже речь идет об увеличении массы, вызванном образованием осадка на вибрационном узле, тем не менее сравнимые действия проводятся и при сокращении массы, например, в числе прочего, вследствие коррозии вибростержней.
Изобретение основано на физическом явлении, при котором возбуждение вибрационного узла вызывает образование колебаний разных типов. Ниже более подробно сообщается о разных типах колебаний при использовании вибрационного детектора, содержащего, например, вибростержни, выполненные в виде лопастей.
В предпочтительном варианте реализации способа согласно изобретению в качестве первого и второго типов колебаний применяют типы, на колебания которых среда воздействует различно.
В соответствии с предпочтительным вариантом реализации способа согласно изобретению в качестве первого типа колебаний применяется тип, колебания которого не зависят от среды, и что в качестве второго типа колебаний применяется тип, колебания которого существенно подвержены воздействию среды. Конкретно это означает, что первым типом колебаний выбирается такой, при котором собственная или резонансная частота смещается вследствие изменения массы, но при этом резонансная частота остается существенно без изменений при контакте вибрационного узла со средой. В качестве первого типа колебаний, следовательно, также применяют любые типы, при которых площади поперечного сечения вибростержней ("вибростержни - среда") в направлении колебаний являются небольшими. При соблюдении этого условия взаимодействие между вибрационным узлом и средой и, следовательно, согласование массы вибрационного узла со средой имеют относительно малое значение. В качестве второго типа колебаний выбирается такой, при котором собственная частота резко изменяется при контакте вибрационного узла со средой.
В предпочтительном варианте реализации способа согласно изобретению на основе изменения первого типа колебаний, которые существенно не зависят от среды, определяют, изменилась ли масса вибрационного узла. В частности, на основе изменения частоты колебаний первого типа определяют образование осадка или сокращение массы вибрационного узла.
Если в первом описанном варианте реализации способа согласно изобретению предусматривался выбор двух типов колебаний, характеризующихся совершенно разными реакциями как следствие изменения массы или как следствие контакта со средой, то при втором варианте действуют иначе. В альтернативном втором варианте реализации способа согласно изобретению предусматривается, что в качестве первого и второго типов колебаний вибрационного узла выбирают два типа, причем оба типа колебаний содержат первую составляющую колебаний, зависящую от согласования с массой среды, и вторую составляющую колебаний, не зависящую от согласования с массой среды, но зависящую только от массы вибрационного узла.
Предпочтительным вариантом реализации способа согласно изобретению предусмотрено, что на основе функциональной зависимости первого и второго типов колебаний вибрационного узла от среды или от массы вибрационного узла делают выводы об изменении массы вибрационного узла. Единственное требование, которое необходимо соблюдать при выборе обоих типов колебаний, это то, чтобы они отличались друг от друга в достаточной степени.
Влияние образования осадка на измеренные величины определяется предпочтительно посредством системы уравнений, состоящей из следующих двух формул:
Использованные в этой системе уравнений символы означают следующие величины:
ΔFC - относительный сдвиг частот колебаний первого типа;
ΔFD - относительный сдвиг частот колебаний второго типа, причем терм  означает относительное смещение собственной частоты колебаний соответствующего типа, при этом "относительное" означает, что замеренное смещение частоты по отношению к соответствующей собственной частоте на воздухе без образования осадка выражено в процентах;
означает относительное смещение собственной частоты колебаний соответствующего типа, при этом "относительное" означает, что замеренное смещение частоты по отношению к соответствующей собственной частоте на воздухе без образования осадка выражено в процентах;
mk - величина для любого вида согласования с массой среды и вызываемого ею затухания. Как указано выше, здесь играют роль наряду с глубиной погружения "h" вибрационного узла также плотность "ρ" и вязкость "η" среды. Расчетно это можно выразить через следующую функциональную зависимость: mk=f(h;p,η]);
mα - масса осадка;
 - кривые сдвига частот двух достаточно разных типов колебаний (например, типа С и типа D) вибрационного узла как функции согласования массы mk вибрационного узла со средой и демпфирования вибрационного узла средой (→ кривые погружения);
- кривые сдвига частот двух достаточно разных типов колебаний (например, типа С и типа D) вибрационного узла как функции согласования массы mk вибрационного узла со средой и демпфирования вибрационного узла средой (→ кривые погружения);
 - кривые сдвига двух достаточно разных типов колебаний (например, типа С и типа D) вибрационного узла как функции образования осадка mα на вибрационном узле (→ кривые осадка).
- кривые сдвига двух достаточно разных типов колебаний (например, типа С и типа D) вибрационного узла как функции образования осадка mα на вибрационном узле (→ кривые осадка).
Предпочтительным вариантом реализации способа, согласно изобретению предусматривается, что сообщение об ошибке выдается в том случае, когда изменения частоты первого и/или второго типа колебаний вибрационного узла, вызванные изменением массы последнего, превышают заданное значение.
Особо предпочтительно, чтобы изменение первого и/или второго типа колебаний вибрационного узла, вызванное изменением массы вибрационного узла, использовалось для линейной корректировки данных измерения вибрационного узла.
В отношении устройства согласно изобретению задача решается за счет того, что блок регулирования/обработки анализирует по меньшей мере первый и второй типы колебаний вибрационного узла и что этот блок на основе обработанных типов колебаний определяет изменение массы вибрационного узла.
Предпочтительным вариантом выполнения устройства согласно изобретению предусматривается, что в него встроен блок регулирования/обработки. В этом случае в устройстве согласно изобретению предусмотрен так называемый компактный датчик. Сообщение об ошибке может выдаваться, например, оптически, акустически и/или по меньшей мере по двум линиям передачи данных в цифровой форме.
Альтернативный в отношении компактного датчика вариант выполнения устройства согласно изобретению предусматривает наличие по меньшей мере двух линий передачи данных, по которым измерительные данные подают в блок регулирования/обработки или через которые блок регулирования/обработки сообщается с удаленным контрольным пунктом. В этой связи особо оптимальна передача соответствующих измерительных и/или корректируемых данных на удаленный контрольный пункт в цифровом виде. Цифровая передача данных имеет по сравнению с аналоговой известное преимущество, состоящее в повышенной помехозащищенности. Для обеспечения связи можно, разумеется, обратиться к известным протоколам и стандартам передачи.
В предпочтительном варианте выполнения устройства согласно изобретению предлагается выходное устройство, которое в оптической и/или акустической форме выдает обслуживающему персоналу сообщение об ошибках, когда предпочтительно в рамках заданных значений допуска происходят превышение или снижение изменения частот, связанное с изменением массы вибрационного узла.
Кроме того, целесообразно, что блок регулирования/обработки подключен к блоку памяти, в котором хранятся заданные значения для допусков изменений частоты, касающиеся изменения массы,
Более подробно изобретение поясняется с помощью приводимых ниже чертежей, на которых представлено:
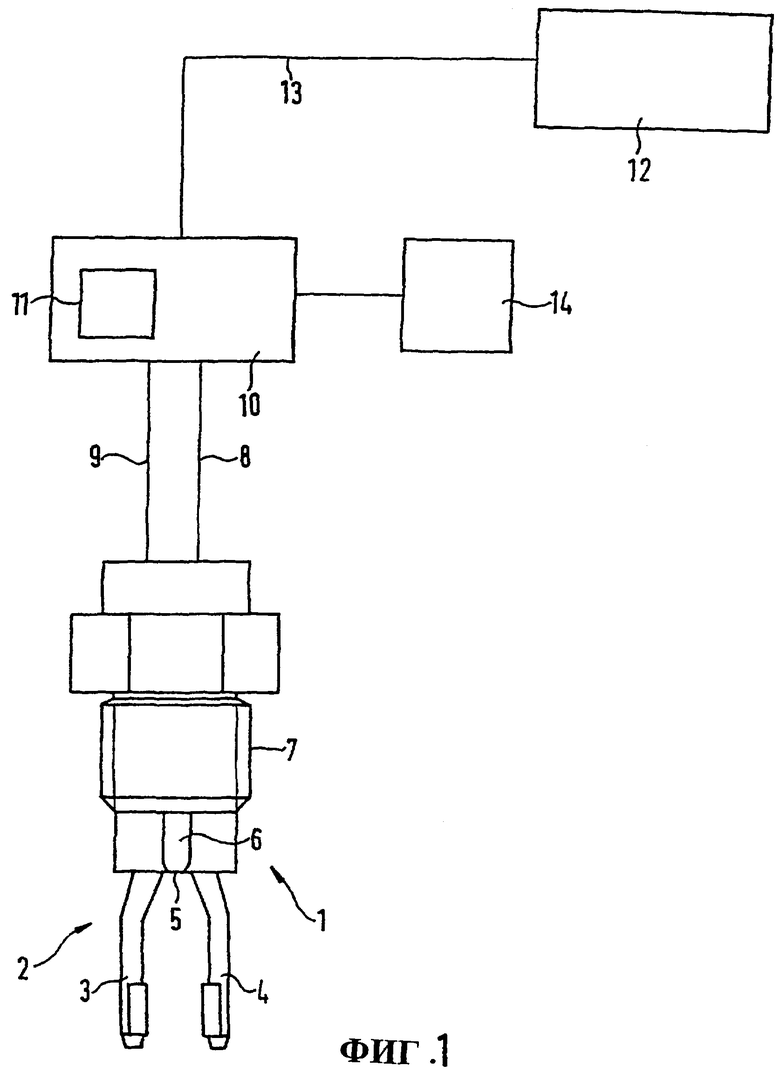
на фиг.1 в схематическом виде устройство согласно изобретению;
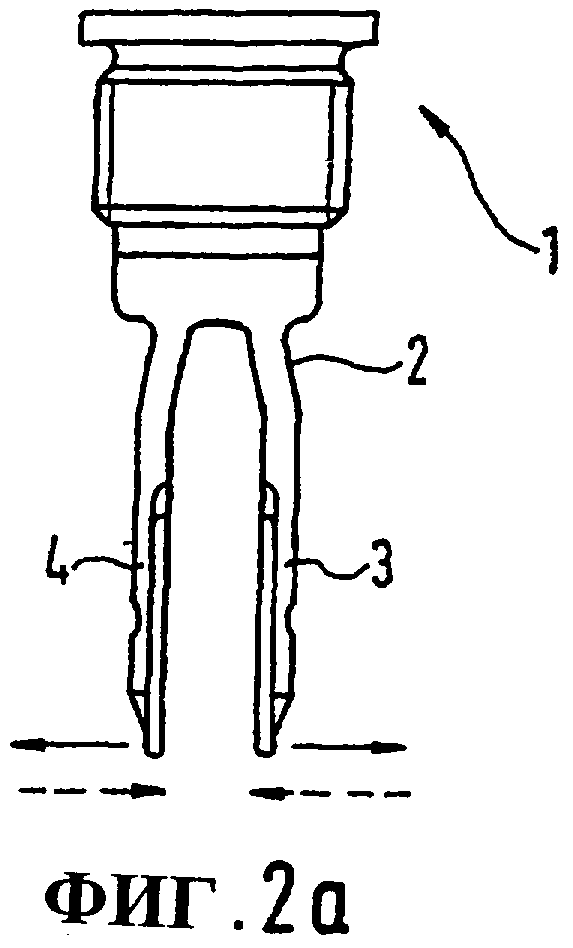
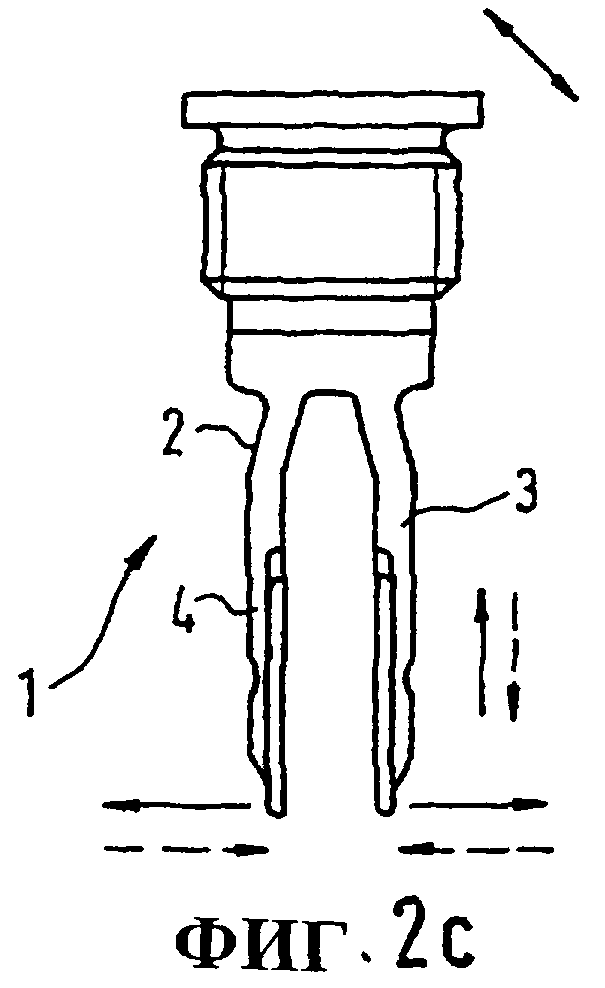
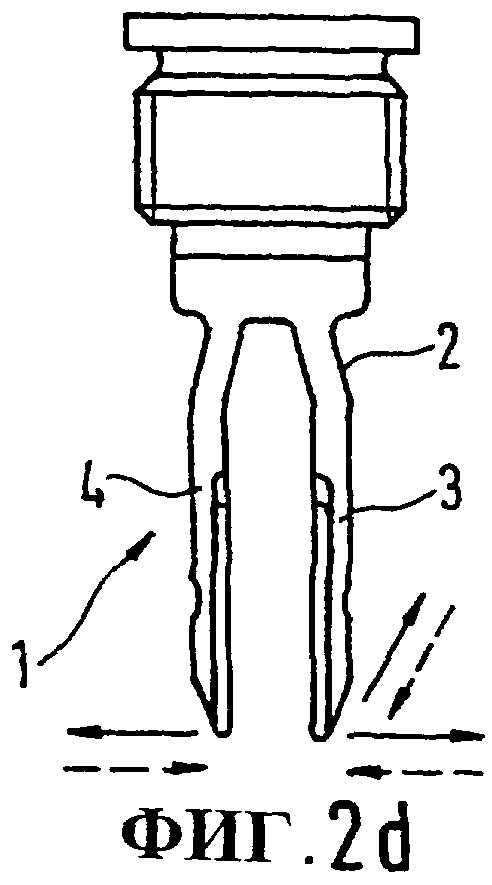
на фиг.2 возможные выбранные типы колебаний предпочтительного вибрационного узла с двумя вибростержнями в виде лопастей:
a) тип А, при котором изменение частоты вызвано согласованием с массой среды,
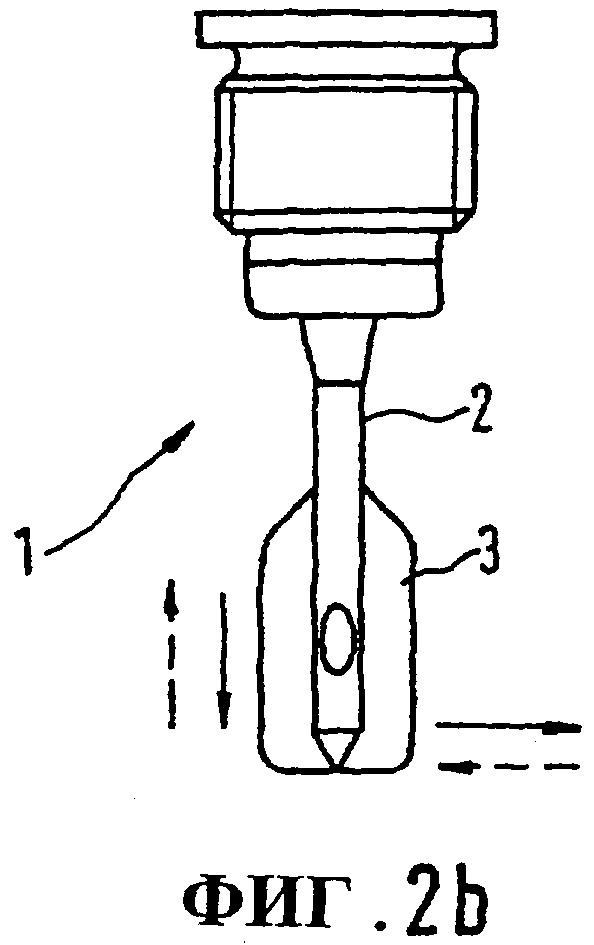
b) тип В, при котором изменение частоты вызвано в основном образованием осадка,
c) тип С, при котором изменение частоты вызвано как образованием осадка, так и согласованием с массой среды,
d) тип D, при котором изменение частоты вызвано как образованием осадка, так и согласованием с массой среды,
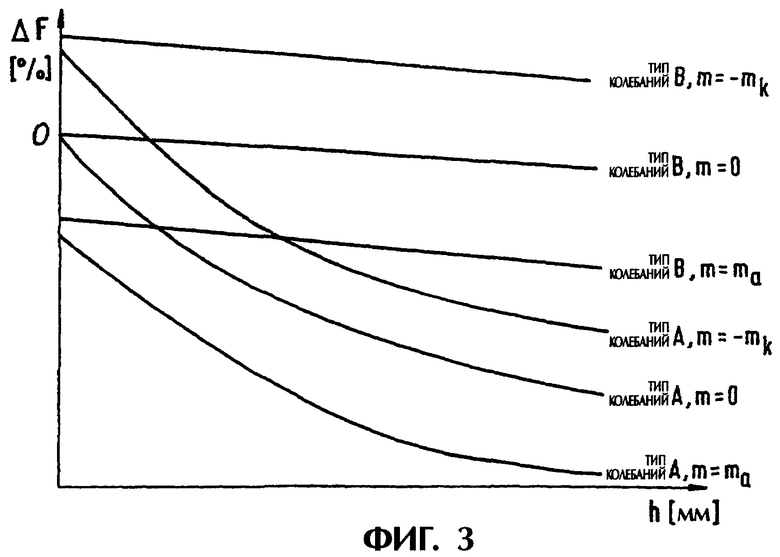
на фиг.3 схематично кривые погружения для представленных на фиг.2а и 2b типов А и В колебаний при наличии и отсутствии массы осадка и при отрицательном изменении массы,
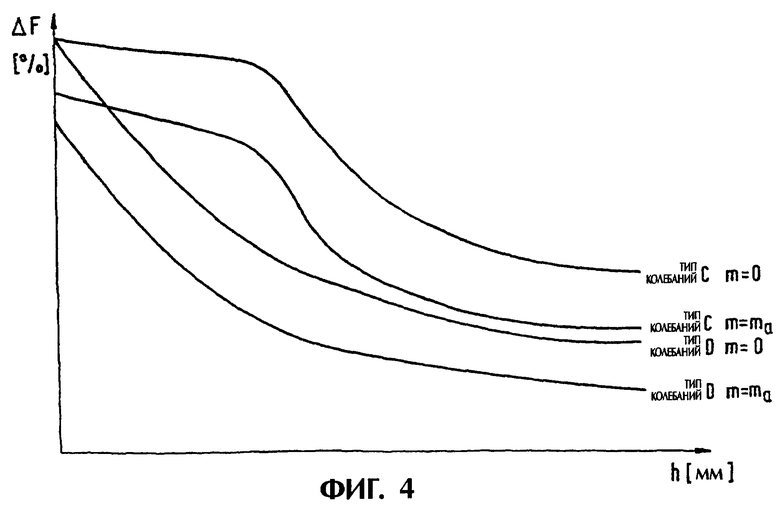
на фиг.4 схематично кривые погружения для представленных на фиг.2а и 2в типов колебаний при наличии и отсутствии массы осадка,
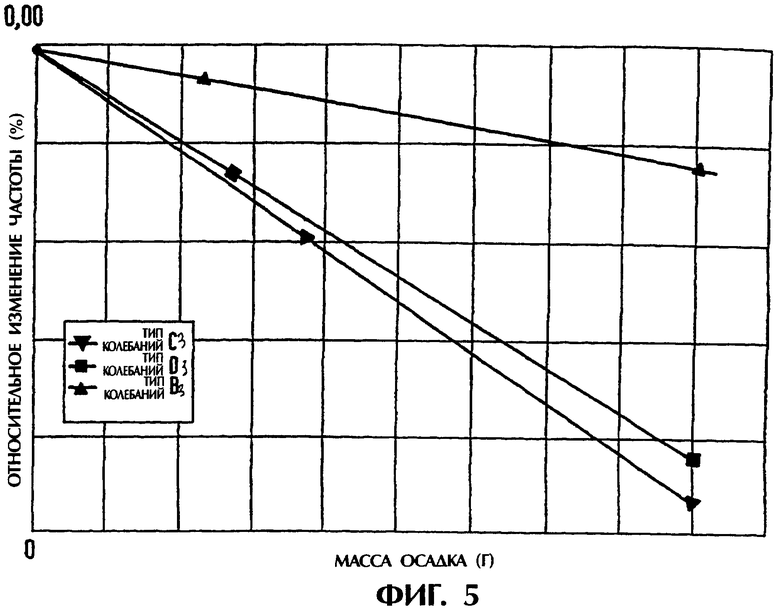
на фиг.5 схематично кривые осадка при разных типах колебаний на воздухе,
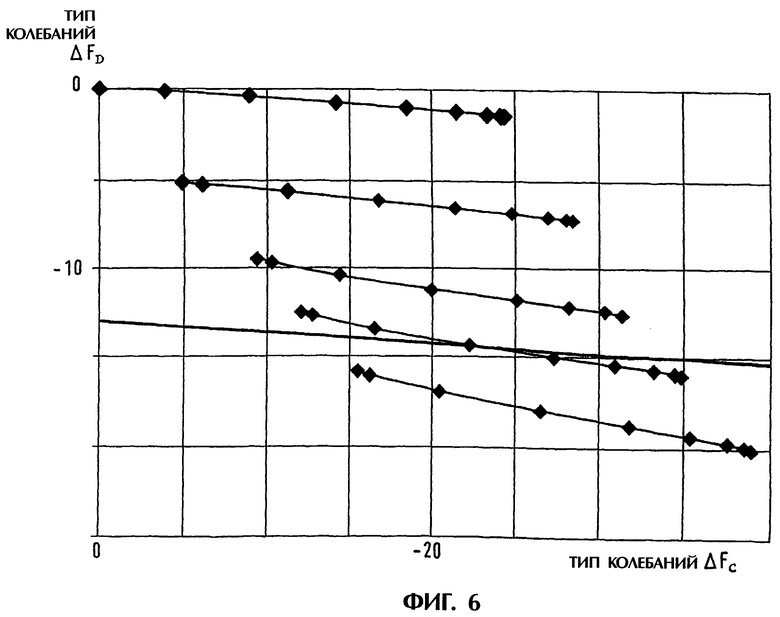
на фиг.6 в графическом виде набор изменений частоты.
На фиг.1 приведено схематическое изображение устройства 1 для определения и/или контроля уровня среды в емкости согласно изобретению, при этом емкость и среда отдельно не показаны. Представленное на фиг.1 устройство, выполненное в виде вибрационного детектора 1, как уже пояснялось выше, предназначено как для определения уровня заполнения, так и для определения плотности находящейся в емкости среды. Если при определении уровня заполнения вибрационный узел 2 погружается или не погружается в среду только при достижении определяемого предельного уровня заполнения, то при контроле или определении плотности ρ он должен погружаться до заданной глубины погружения h. Под емкостью может подразумеваться, например, резервуар или труба, по которой протекает среда.
Устройство 1 содержит в основном цилиндрический корпус. На боковой поверхности корпуса выполнена резьба 7. Резьба 7 служит для крепления устройства 1 на отметке заданного уровня заполнения и выполнена в соответствующем отверстии в емкости. Само собой разумеется, что предусмотрена возможность применения и других видов крепления, например, с помощью фланцев, заменяющих резьбовое соединение.
Корпус вибрационного детектора 1 заканчивается мембраной 5, расположенной на его концевом, заходящим в емкость участке, при этом мембрана 5 зажата своим краевым участком в корпусе. На мембране 5 закреплен вводимый внутрь емкости вибрационный узел 2. В изображенном случае вибрационный узел 2 имеет форму камертона и содержит, следовательно, два разнесенных между собой, закрепленных на мембране 5 и входящих внутрь емкости вибрационных стержня 3, 4.
Мембрана 5 приводится в колебания приемно-приводным элементом 6, причем приводной элемент возбуждает в мембране 5 колебания с данной частотой. Приводной элемент представляет собой, например, столбиковый привод или биморфный привод. Оба эти вида пьезоэлектрических приводов достаточно известны из уровня техники, поэтому здесь они не описаны. В результате колебаний мембраны 5 колеблется и вибрационный узел 2, причем частоты колебаний различны в том случае, когда вибрационный узел 2 приходит в контакт со средой и выполнено согласование с массой среды или когда вибрационный узел 2 свободен и может колебаться вне контакта со средой.
В качестве приемного блока, подобно приводному узлу, предусмотрена возможность применения, например, единственного пьезоэлектрического элемента. Приемно-приводной блок 6 возбуждает в мембране 5 колебания в зависимости от передаваемого сигнала, поступившего на пьезоэлемент; кроме того, этот блок служит для приема и преобразования колебаний мембраны 5 в электрические принимаемые сигналы.
В результате такой колебательной характеристики пьезоэлектрического элемента разница между напряжениями вызывает прогибание зажатой в корпусе мембраны 5. Расположенные на мембране 5 вибростержни 3, 4 вибрационного узла 2 вследствие колебаний мембраны 5 совершают в противоположном направлении колебания вдоль своей продольной оси. Типы колебаний в противоположном направлении имеют то преимущество, что переменные усилия, передаваемые каждым вибростержнем 3, 4 на мембрану 5, взаимно уничтожаются. Благодаря этому сводится к минимуму механическое нагружение места закрепления, в результате чего колебательная энергия почти не передается на корпус или место крепления вибрационного детектора. В результате эффективно предупреждаются резонансные колебания средств крепления вибрационного детектора 1, которые способны интерферировать с колебаниями вибрационного узла и искажать данные измерений.
Электрические принимаемые сигналы по линиям передачи данных 8, 9 поступают в блок регулирования/обработки 10. Блок регулирования/обработки 10 соединен с блоком памяти 11, в котором хранятся заданные величины, которые позволяют блоку регулирования/обработки определять образование осадка на вибрационном узле 2 и при необходимости вносить поправки в измеренные величины. Сообщение об ошибке передается обслуживающему персоналу в указанном случае через выходной блок 14. Кроме того, на фиг.1 показан контрольно-управляющий пункт 12, расположенный на удалении отвибрационного детектора 1. Блок регулирования/обработки 10 и контрольный пункт 12 сообщены между собой линией 13 передачи данных. Предпочтительно, чтобы связь осуществлялась на цифровой основе в целях повышения помехозащищенности.
На фиг.2а, 2b, 2с и 2d показаны четыре выбранных и возможных типа колебаний вибрационного узла 2 с двумя вибростержнями 3, 4 лопастной формы. При типе В колебаний, показанном на фиг.2b, глубина погружения ΔF существенно не зависит от согласования массы mk со средой, так как вследствие происходящих параллельно лопастной поверхности колебательных движений взаимодействующие со средой площади поперечного сечения сохраняются относительно малыми. Поэтому частота колебаний существенно не зависит от глубины h погружения вибрационного узла 2 в среду, однако она имеет четкую зависимость от массы mα осадка на колебательных стержнях 3, 4. Как уже неоднократно упоминалось, аналогичные подходы действительны и в отношении потери массы вибрационного узла. Поэтому в рамках определенных допусков на основе изменения частоты AF колебаний типа В однозначно можно сделать вывод о массе осадка на вибростержнях 3, 4.
Графически такая функциональная зависимость представлена на фиг.3. На этой фигуре показаны кривые ΔF(h) для изображенных на фиг.2b типов А и В колебаний с и без массы осадка mα. Также изображены на фиг.3 соответствующие кривые погружения ΔF(h) при отрицательном изменении массы вибрационного узла 2, т.е. при потере массы (mk) вибрационного узла 2; потеря массы может произойти, например, вследствие коррозии или механического износа вибростержней 3, 4. Кривые погружения ΔF(h), т.е. изменение частоты ΔF колебаний типа В в зависимости от глубины погружения h, независимо от массы вибрационного узла 2 имеют приблизительно нулевой подъем. Следовательно, они располагаются существенно параллельно оси х. Согласно логике изменение частоты ΔF возрастает с увеличением или уменьшением изменения массы mα. Совершенно иначе ведут себя кривые погружения ΔF(h) колебаний типа А, представленные также на фиг.3: здесь доминирует совершенно очевидно изменение частоты в зависимости от глубины погружения h вибрационного узла в среду. Положительное или отрицательное изменение массы mα, mk вибрационного узла 2 выражается через параллельное смещение кривых погружения ΔF(h).
Поэтому оба типа колебаний, тип А и тип В, наиболее пригодны для применения в сочетании с первым вариантом осуществления способа согласно изобретению. Согласно этому варианту определение величины образования осадка (или потери массы) производится с помощью обоих типов колебаний, существенно не зависящих от среды, причем второй тип колебаний представляет собой тип, при котором колебания испытывают воздействие в основном только от среды.
Изменение частоты ΔF, определяемое посредством зависящего от массы mα осадка (или потери массы) типа В колебаний, используется как предусмотрено оптимальным вариантом осуществления способа согласно изобретению для внутренней корректировки данных измерений вибрационного детектора 1. Кроме того, информация о величине образования осадка на вибрационном узле 2 или потере массы последнего может быть также использована в целях "планово-предупредительного ремонта": обслуживающему персоналу визуализируется или сообщается о том, когда необходимо произвести очистку вибрационного узла 2 или заменить его на вибрационный узел, свободный от осадка.
На фиг.2с и 2d показаны два дополнительно возможных типа колебаний вибрационного узла 2 с двумя вибростержнями 3, 4, выполненными в виде лопастей, применяемые преимущественно во втором варианте осуществления способа согласно изобретению. При этом условием является, чтобы оба типа С и D колебаний зависели как от согласования массы mk вибрационного узла со средой, так и от массы осадка на вибрационном узле. Кроме того, оба типа этих колебаний должны четко различаться между собой в отношении кривых погружения ΔF(h). В том, что это действительно так, можно легко убедиться на примере схематически представленного на фиг.4 семейства кривых.
На фиг.5 показаны кривые осадка ΔF(mα) при типах А, В и С колебаний. Если тип В колебаний характеризуется лишь незначительной зависимостью от массы осадка mα, то типы С и D колебаний имеют сильную зависимость от изменения массы вибрационного узла 2.
Математически кривые погружения ΔF(h) при обоих типах С и D колебаний формально в первом приближении (смешанный терм пренебрегается) описываются следующей системой уравнений:
Эта система уравнений должна решаться при mα = f(ΔF0, ΔFx).
Из уравнения (1) следует

Из уравнения (2) следует
Предпочтительно применять цифровой способ решения.
Из (3) и (5) следует

Необходимость в приведении очевидной формулы для mα отсутствует, так как в конечном итоге интерес представляет только относительное изменение частоты типа С колебаний, вызываемое образованием осадка. Предельный показатель для fc2(mα) должен задаваться таким, чтобы постоянно обеспечивалось определение заданного уровня заполнения или плотности среды в диапазоне предельных допусков.
Кривые погружения и кривые образования осадка, представленные на фиг.4 и 5 и полученные преимущественно эмпирически, могут быть приближены известным способом с использованием аппроксимирующих функций и, следовательно, математически описаны.
Через систему уравнений и аппроксимацию полученных кривых можно определить при каждом измеренном наборе разниц частот ΔFC, ΔFD значение для fc2(mα), т.е. относительное изменение частот для типа С колебаний в зависимости от массы осадка mα.
На фиг.6 представлена диаграмма с нанесенными на ней посредством ΔFC, ΔFD измеренными значениями набора разниц частот. Точки замеров различаются глубиной погружения h и/или массой осадка mα на вибрационном узле. Точки замеров с одинаковой массой осадка mα представлены на фиг.7 и связаны между собой.
Измеренные значения, приведенные в верхней части фиг.6, характеризуют состояние: "Небольшая масса осадка", измеренные значения в нижней части: "Большая масса осадка". Следовательно для обработки измеренных значений достаточно, чтобы блок регулирования/обработки 10 измерил изменения частоты колебаний двух довольно разных типов - в изображенном случае это типы С и D колебаний - и сравнил со значениями, хранимыми в памяти в виде таблицы. На основе расположения измеренных значений можно четко установить, является ли образование осадка или потеря массы все еще некритической или же необходимо подать тревожный сигнал.
Перечень позиций
1 вибрационный детектор или датчик плотности
2 вибрационный узел
3 вибростержень
4 вибростержень
5 мембрана
6 блок возбуждения и приема
7 резьба
8 линия передачи данных
9 линия передачи данных
10 блок регулирования/обработки
11 блок памяти
12 контрольный пункт
13 линия передачи данных
14 выходной блок
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И/ИЛИ КОНТРОЛЯ УРОВНЯ ЗАГРУЖЕННОГО МАТЕРИАЛА В ЕМКОСТИ | 2001 |
|
RU2239794C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАДАННОГО УРОВНЯ ИЗМЕРЯЕМОЙ СРЕДЫ В ЕМКОСТИ | 2003 |
|
RU2291403C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЖИДКОСТИ В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2557680C2 |
| Устройство для определения уровня жидкости | 1990 |
|
SU1767352A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ СВОБОДНОТЕКУЧИХ МАТЕРИАЛОВ В ЕМКОСТЯХ | 2010 |
|
RU2535249C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ВИБРАЦИОННЫХ РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2231241C2 |
| КОРИОЛИСОВ МАССОВЫЙ РАСХОДОМЕР И СПОСОБ ПОЛУЧЕНИЯ ПЕРВОГО ИЗМЕРЕННОГО ЗНАЧЕНИЯ | 2004 |
|
RU2348012C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ГАЗОВОЙ СРЕДЫ | 1996 |
|
RU2098925C1 |
| СПОСОБ РАЗРАБОТКИ ОБВОДНЕННОГО НЕФТЯНОГО МЕСТОРОЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2163660C1 |
| СТРУЙНЫЙ РАСХОДОМЕР И СПОСОБ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2421690C2 |
Изобретение относится к способу и устройству для определения и/или контроля уровня среды в емкости или для определения плотности среды в емкости. Способ включает расположение вибрационного узла на отметке заданного уровня заполнения так, чтобы он был погружен в среду на определенную глубину. В вибрационном узле возбуждают колебания и определяют достижение заданного уровня заполнения при колебаниях вибрационного узла с частотой, которая характеризуется заданным изменением частоты по отношению к частоте возбуждения. Плотность среды определяют на основе частоты колебаний вибрационного узла. Анализируют по меньшей мере первый и второй типы колебаний вибрационного узла. На основе анализа типов колебаний определяют изменение массы вибрационного узла. Устройство включает вибрационный узел, блок привода/приема, блок регулирования/обработки. Блок привода/приема возбуждает в вибрационном узле колебания с помощью заданной частоты возбуждения и принимает колебания вибрационного узла. Блок регулирования/обработки определяет достижение заданного уровня заполнения, как только происходит изменение частоты колебаний, или определяет плотность среды на основе изменения частоты колебаний вибрационного узла. Блок регулирования/обработки анализирует при обработке по меньшей мере первый и второй типы колебаний вибрационного узла и определяет на основе обработанных типов колебаний изменение массы вибрационного узла. Технический результат состоит в увеличении надежности определения и/или контроля уровня заполнения или плотности среды. 2 н. и 13 з.п. ф-лы, 9 ил.
| СПОСОБ СПИРТОВАНИЯ ПРОДУКТОВ | 0 |
|
SU282251A1 |
| DE 4201360 A1, 22.07.1993 | |||
| СПОСОБ ЛЕЧЕНИЯ ИШЕМИЧЕСКОЙ БОЛЕЗНИ СЕРДЦА | 1998 |
|
RU2150292C1 |
| УЛЬТРАЗВУКОВОЙ ДАТЧИК УРОВНЯ ЖИДКОСТИ | 1997 |
|
RU2127873C1 |
| RU 2058692 C1, 20.04.1996. | |||

