Предпосылки изобретения
Данное изобретение относится к автоматической системе для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств.
Известные системы обработки кузовов транспортных средств обычно содержат технологическую направляющую или рельс для перемещения челночного узла, который удерживает несущую платформу, перемещаемую к различным технологическим резервуарам.
Опорный челночный узел содержит подвешивающий элемент, которым управляют для осуществления переноса узла платформы на посты обработки.
Однако такая система имеет очень сложную конструкцию. Действительно для перемещения челночных узлов необходимо использовать верхнюю удерживающую линию, что подразумевает наличие существенных сложностей при необходимости изменения тракта обработки.
Сущность изобретения
Таким образом, целью данного изобретения является преодоление вышеуказанных проблем за счет использования автоматической системы для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств, которая позволяет значительно упростить направляющую для транспортного средства и при этом не требует наличия каких-либо вспомогательных элементов для удержания и крепления платформенных узлов, несущих кузова обрабатываемых автомобилей.
Основной задачей изобретения, согласующейся с указанной целью, является создание такой автоматической системы, которая была бы очень гибкой в работе и при необходимости легко расширяемой без сложных изменений.
Другой задачей изобретения является создание такой автоматической системы, которая была бы очень безопасной с точки зрения эксплуатации, позволяла осуществлять простое управление технологической линией для обработки кузовов транспортных средств и обладала преимуществом, заключающимся в возможности выбора по желанию выполняемых технологических операций.
Другой задачей изобретения является создание такой автоматической системы, которая обеспечивала бы возможность быстрого выполнения разнообразных технологических циклов перемещения и обработки в зависимости от типа обрабатываемого автомобиля.
Еще одной задачей данного изобретения является создание такой автоматической системы, которая обеспечивала бы возможность обходить по выбору любые технологические резервуары, не используемые для обработки кузовов.
Другой задачей изобретения является создание автоматической системы, не содержащей челночных узлов.
Еще одной задачей данного изобретения является создание такой автоматической системы, которая помимо кузовов транспортных средств обеспечивала бы возможность обработки металлических изделий в целом.
Согласно одному из аспектов данного изобретения указанные цель и задачи, равно как и другие поясняемые ниже задачи, достигаются за счет использования автоматической системы для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств, которая характеризуется тем, что содержит технологическую направляющую, включающую в себя множество пар расположенных друг против друга роликов для переноса платформы, несущей на себе кузов, причем указанная направляющая воздействует на по меньшей мере один технологический резервуар, где имеется пара захватывающих арочных элементов для удаления указанной платформы с этой направляющей, приводные средства для приведения указанных арочных элементов в действие, для ввода указанного кузова в по меньшей мере один технологический резервуар.
Краткое описание чертежей
Другие особенности и преимущества данного изобретения становятся более понятными из нижеследующего описания предпочтительного, но не единственно возможного, варианта выполнения предложенной автоматической системы для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств. Этот вариант проиллюстрирован показательным примером, не ограничивающим объем патентных притязаний, на сопровождающих чертежах, на которых:
фиг.1 является схематичным видом сверху предложенной автоматической системы;
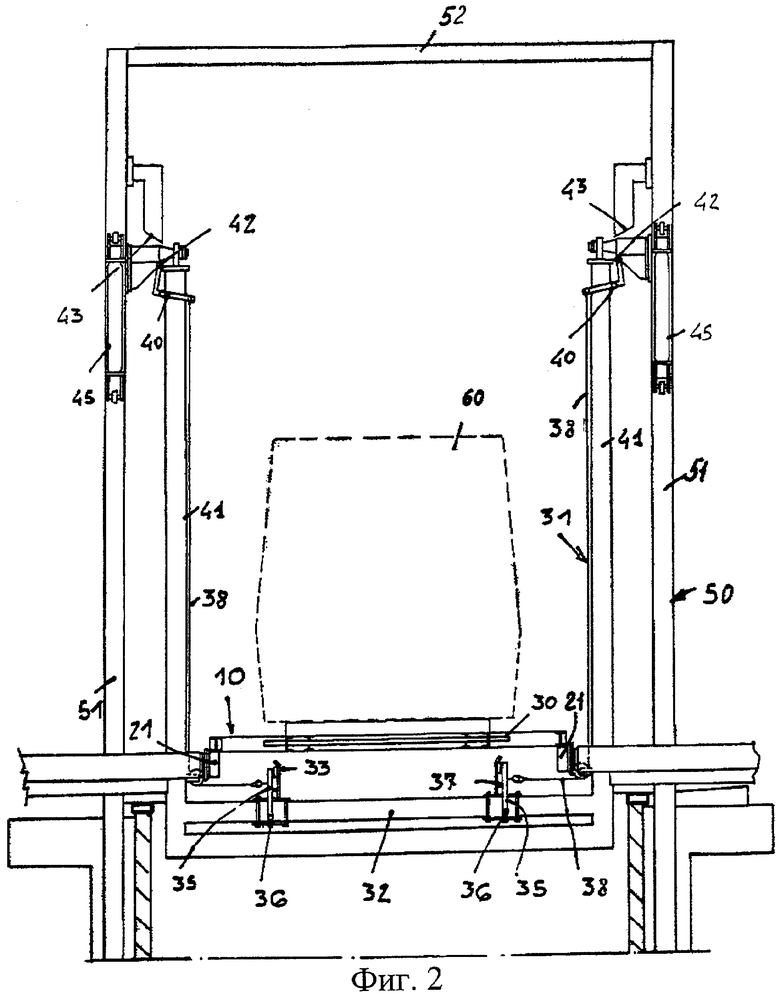
фиг.2 является схематичным видом в разрезе, изображающим арочный элемент или звено перед захватом платформы;
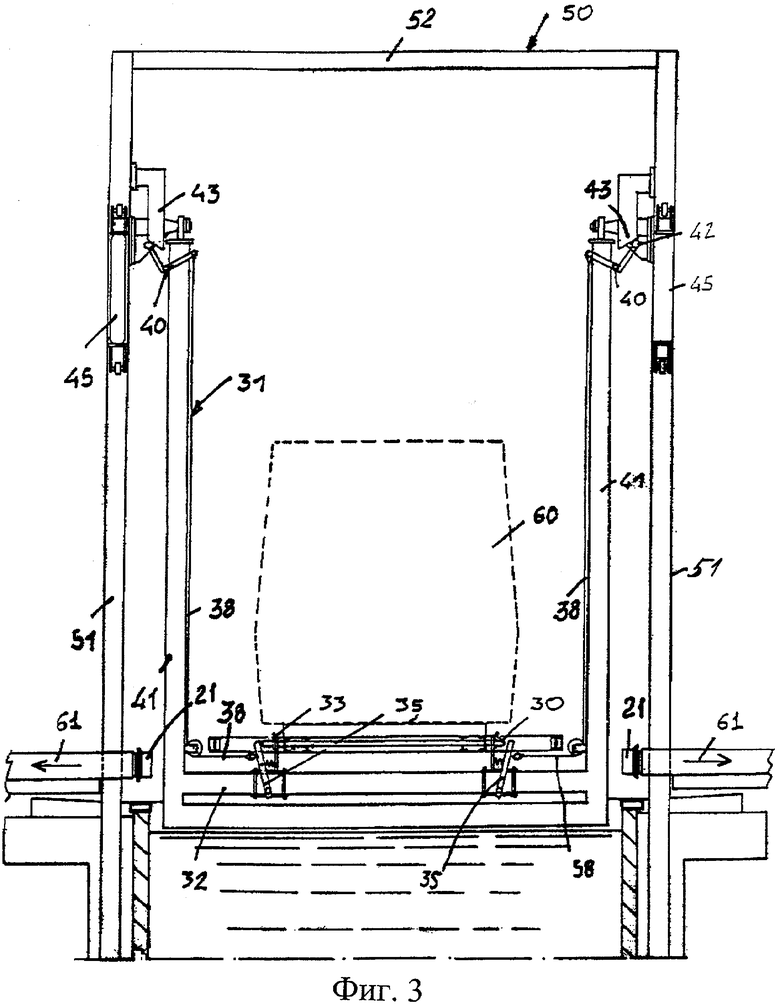
фиг.3 является схематичным дополнительным видом в разрезе, изображающим предложенную автоматическую систему на рабочем этапе, на котором арочное звено и платформенный узел (платформа) находятся во взаимодействии;
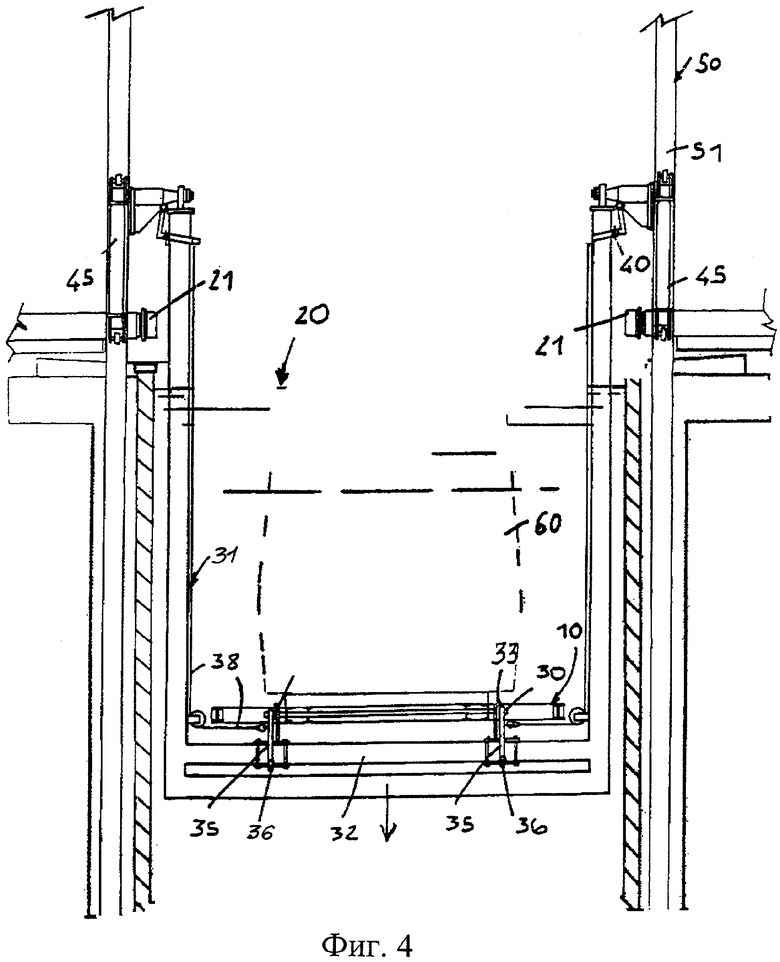
фиг.4 иллюстрирует этап работы предложенной автоматической системы, на котором платформенный узел (платформа) опущен в технологический резервуар;
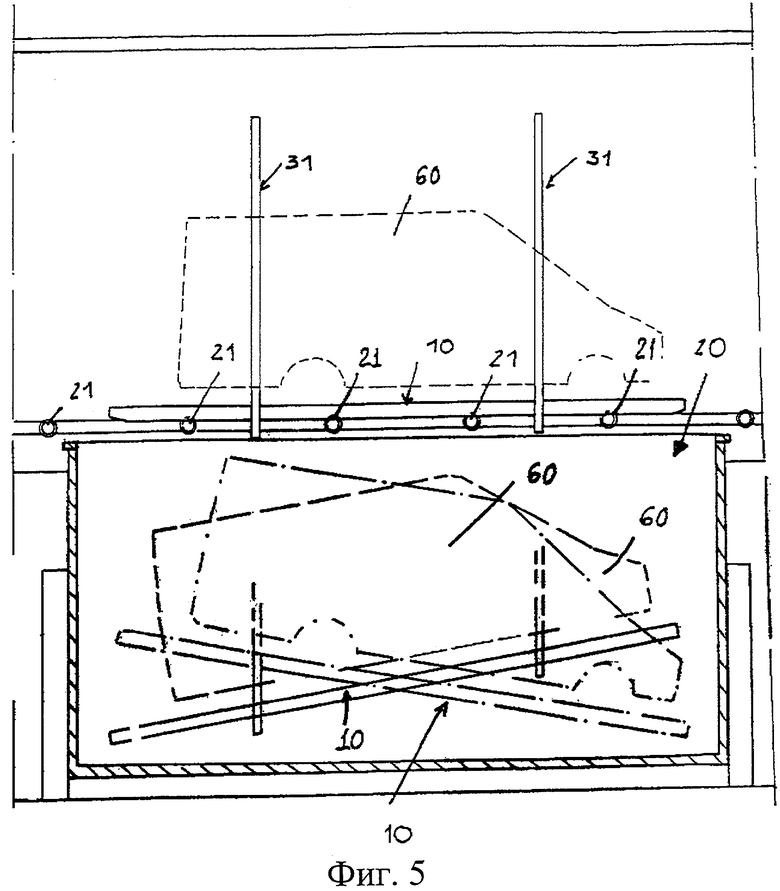
фиг.5 является схематичным дополнительным видом, показывающим арочные элементы, приводимые в действие для перевода платформенного узла (платформа) в наклоненное состояние при введении кузова транспортного средства в технологический резервуар;
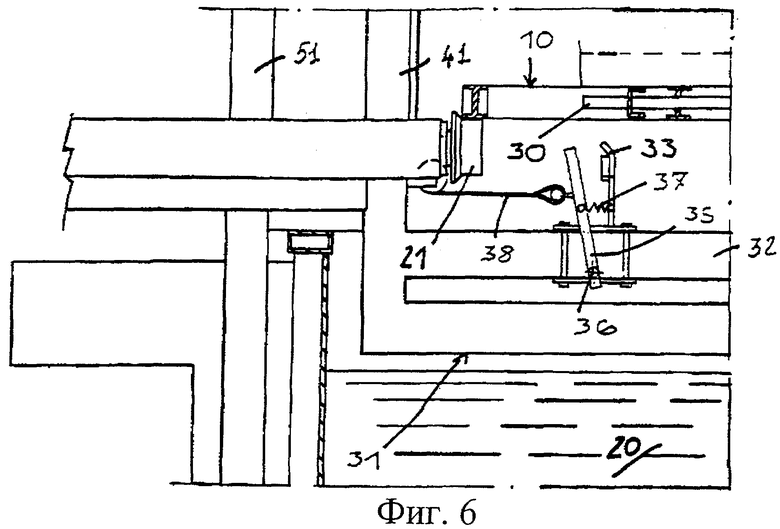
фиг.6 изображает узел соединительных тяг, предназначенный для размыкания средств фиксации, показанных в разомкнутом состоянии;
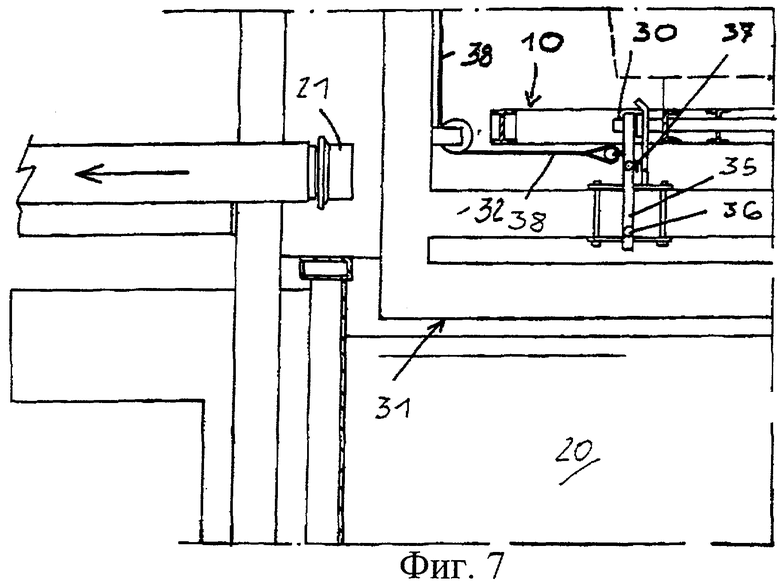
фиг.7 схематично изображает соединительную тягу для размыкания средств фиксации, показанных в замкнутом состоянии;
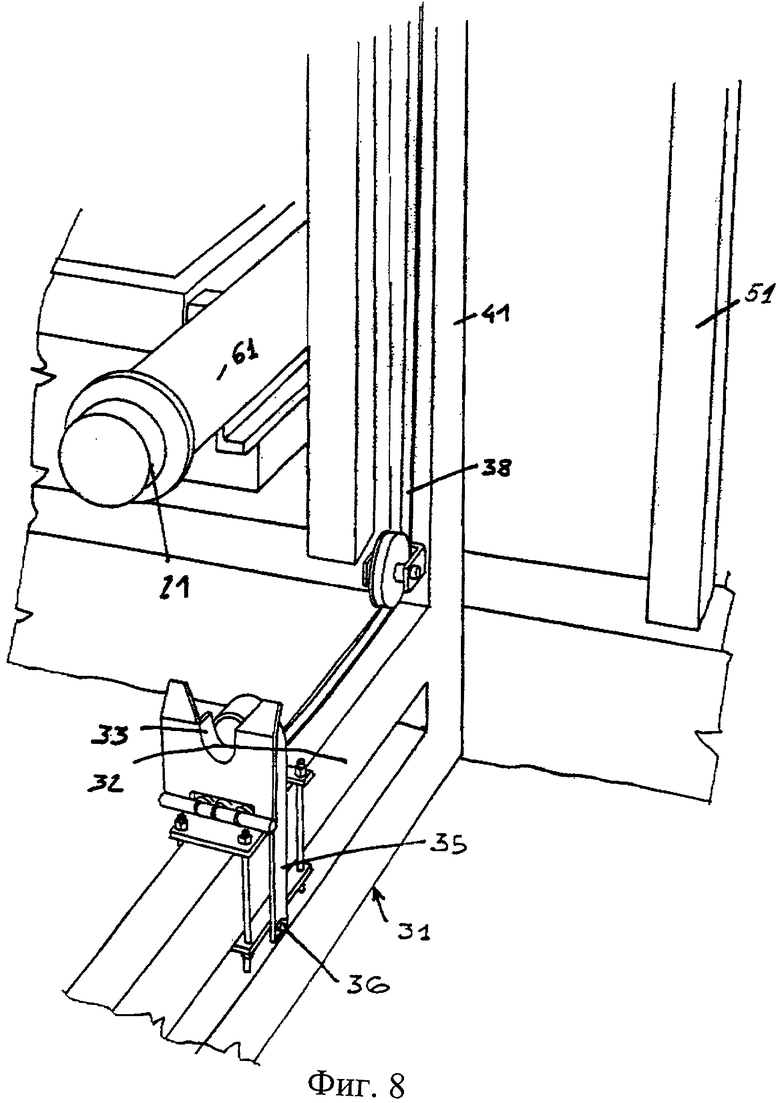
фиг.8 схематично изображает в аксонометрии средства фиксации, находящиеся в замкнутом состоянии;
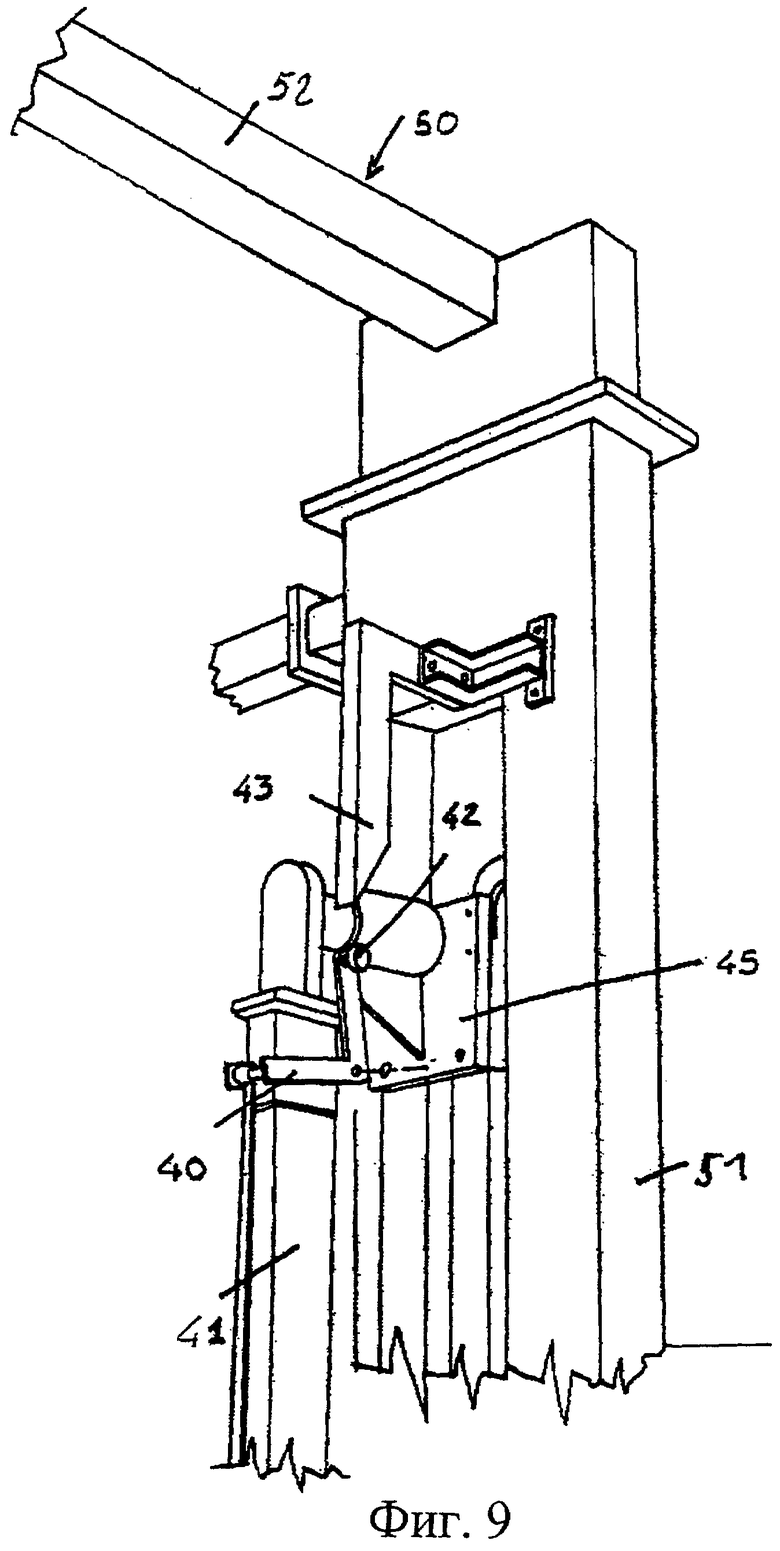
и фиг.9 схематично изображает кулачковый узел, взаимодействующий с арочным звеном для приведения в действие соединительной тяги.
Описание предпочтительных вариантов выполнения изобретения
Обратимся к номерам позиций элементов на чертежах. Предложенная автоматическая система для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств, которая в целом обозначена позицией 1, включает в себя рабочую направляющую 2, оснащенную рабочим столом, который содержит множество расположенных друг против друга роликов 3, соединенных поперечными валами 4.
Эти поперечные валы 4 приводятся в движение, в частности, редукторным двигателем 5, который, говоря более конкретно, приводит в движение ведомый вал 3', который через цепи 6 и смещенные друг относительно друга шестерни 7 приводит в движение, в свою очередь, все указанные ролики 3.
Как показано на чертеже, ролики 3 удерживают платформенный узел (платформа) 10, который образован продольными звеньями 11, соединенными поперечными звеньями 12.
Продольные звенья или элементы 11 движутся по роликам со скольжением, вызывая перемещение платформенного узла, несущего на себе кузов 60 транспортного средства, к технологическим резервуарам, которые в целом обозначены номером 20 и используются для последовательного проведения в них любых требуемых технологических процедур и операций, таких как травление, промывка, фосфатирование, дополнительные операции промывки водой или деминерализованной водой, операции покраски и т.п.
Предложенная система обеспечивает возможность использования переменного количества технологических резервуаров 20, а следовательно, позволяет легко изменять свою производительность в любой требуемый момент, в том числе уже после начального монтажа системы.
Действительно для повышения производительности обработки достаточно изменить или увеличить количество технологических резервуаров.
Кроме того, предложенная автоматическая система специально разработана так, что позволяет обрабатывать кузова самых разных типов и/или осуществлять разнообразные технологические операции в зависимости от материала, образующего кузов 60.
Например, в случае алюминиевых кузовов некоторые технологические операции не проводятся, что ускоряет всю обработку этих алюминиевых кузовов 60.
Это обеспечивается за счет последовательного перемещения нескольких кузовов 60 и исключения ненужных технологических операций.
В этом случае в технологические резервуары 20 вводят некоторые из кузовов 60, а другие корпуса, не подлежащие подобной обработке, идут обходным путем по верхнему уровню.
Для осуществления этой обходной операции каждый технологический резервуар 20 оснащен роликами резервуара, которые обозначены позицией 21, расположены парами и взаимодействуют с противолежащими роликами.
Ролики 21 резервуара, в частности, приводятся в действие двумя независимыми двигателями 23, предпочтительно двигателями шагового типа, рабочие скорости которых можно легко синхронизировать.
Прямолинейное возвратно-поступательное перемещение роликов 21 резервуара и валов 61, удерживающих указанные ролики, управляется другими двигателями при помощи червячных узлов, кривошипно-шатунных узлов или гидравлических цилиндров.
Указанные приводные двигатели 23 управляются при помощи бесконтактных датчиков, количество которых в предпочтительном случае составляет три на каждую сторону.
Один из указанных бесконтактных датчиков при прохождении через него несущей платформы вызывает уменьшение движущей скорости двигателя.
Другой бесконтактный датчик при взаимодействии с платформой вызывает останов двигателя, а третий бесконтактный датчик, расположенный ниже приводного устройства по маршруту обработки, подтверждает состояние останова.
Ролики 21 резервуара удерживаются с возможностью осевого перемещения, чтобы выходить из взаимодействия с платформой 10 при ее введении внутрь требуемого технологического резервуара 20.
На указанном платформенном узле расположено множество фиксирующих штырей 30, которые выступают вбок и предназначены для взаимодействия с арочными элементами 31, предусмотренными в количестве по два на каждый технологический резервуар.
Более конкретно указанные арочные звенья или элементы 31 по существу имеют U-образную форму и оснащены парой вилочных элементов 33, которые расположены на нижней поперечине 32 указанной U-образной формы и предназначены, как станет более понятно из нижеследующего, для взаимодействия с фиксирующими штырями 30, чтобы поднимать платформенный узел.
Кроме того, для фиксации указанных штырей предусмотрены средства фиксации, они содержат изогнутый элемент 35, нижняя часть которого шарнирно соединена в точке 36 с поперечиной 32 и на который оказывается противодавление возвратной пружиной 37, вызывающей закрепление этих изогнутых элементов на указанных штырях.
Также имеются освобождающие соединительные тяги 38, воздействующие на верхние концевые части изогнутых элементов 35 и соединенные своею верхней частью с качающимся рычагом 40, который удерживается стойкой 41 арочного звена и оснащен небольшим роликом 42, взаимодействующим с кулачком 43, имеющим наклонную поверхность.
Последний соединен с неподвижной рамой 50, расположенной над технологическим резервуаром, и предназначен для размыкания средств фиксации при поднятом состоянии арочного звена в начале работы, что наглядно показано на фиг.3.
Во время этого рабочего этапа арочное звено поднимает платформенный узел, перемещая его вверх от роликов 21 резервуара, которые при этом не совершают перемещения вдоль оси, чтобы освободить верхнюю концевую часть резервуара, но позволяют арочным звеньям опуститься внутрь резервуара.
Во время этого рабочего этапа пара арочных звеньев опускается по-разному, с совершением ряда колебательных движений платформенного узла, что позволяет погружать кузов в наклонном положении и обеспечивает легкое удаление воздушных пузырей, скапливающихся внутри кузова и на его верхних стенках.
Таким образом, гарантируется безупречная обработка внутренних поверхностей коробчатых кузовов, предотвращаются создаваемые воздушными пузырями помехи правильной адгезии продукта, который должен быть нанесен в ходе различных технологических операций.
В этой связи необходимо заметить, что при подъеме каждого арочного звена до его верхнего крайнего положения, оно автоматически приводит в движение кулачки, освобождая или отцепляя боковые изогнутые элементы, взаимодействующие со штырями.
При опускании арочных звеньев они прочно сцепляются с выступающими вбок штырями платформы, обеспечивая идеальное закрепление платформенных узлов.
При нахождении арочного звена в нижнем положении можно опять подходящим образом установить ролики 21 резервуара, что обеспечивает платформе возможность свободного прохождения технологического резервуара.
Как показано на чертежах, арочные звенья приводятся в действие при помощи приводных суппортов 45, скользящих по стойкам 51 рамы 50.
Из вышеизложенного следует, что данное изобретение полностью удовлетворяет поставленным целям и задачам.
В частности, в изобретении предложена автоматическая система для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств, которая позволяет использовать технологические направляющие, которые не содержат подвесных конструкций, являются очень гибкими с функциональной точки зрения и легко модифицируются для большого количества кузовов разных типов.
Описанное изобретение допускает различные варианты и модификации, на которые распространяется объем правовой охраны изобретения.
Кроме того, все конструктивные элементы могут быть заменены другими, технически эквивалентными элементами.
При практической реализации изобретения его возможные размеры и формы, равно как и используемые материалы, могут быть любыми, в зависимости от требований.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ МОДУЛЬНАЯ СИСТЕМА ДЛЯ ПЕРЕМЕЩЕНИЯ И ОБРАБОТКИ КУЗОВОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2265544C2 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ СОЕДИНЕНИЯ АРОЧНОГО ЭЛЕМЕНТА И ПЛАТФОРМЕННОГО ЭЛЕМЕНТА В АВТОМАТИЧЕСКОЙ СИСТЕМЕ ДЛЯ ОБРАБОТКИ КУЗОВОВ АВТОМОБИЛЕЙ | 2004 |
|
RU2278054C2 |
| МАНИПУЛЯТОР, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ПЕРЕМЕЩЕНИЯ, ОКУНАНИЯ И ПОВОРАЧИВАНИЯ КУЗОВОВ АВТОМОБИЛЕЙ И ФУРГОНОВ, КАБИН ГРУЗОВИКОВ И МЕТАЛЛИЧЕСКИХ КОРПУСОВ В ТЕХНОЛОГИЧЕСКИХ РЕЗЕРВУАРАХ | 2007 |
|
RU2422355C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2302967C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2302966C2 |
| МЕХАНИЗМ НАВЕСКИ БОКОВОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА И КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2480133C2 |
| Транспортное средство со сменными кузовами | 1985 |
|
SU1296451A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2304063C2 |
| Кузов транспортного средства | 1982 |
|
SU1017574A1 |
| Кузов самосвального транспортного средства | 1983 |
|
SU1119881A1 |
Изобретение относится к автоматической системе для обработки кузовов транспортных средств, в частности легковых автомобилей и производственных транспортных средств. Система содержит технологическую направляющую, включающую в себя пары расположенных друг против друга роликов для переноса платформы с расположенным кузовом или шасси. Направляющая предназначена для переноса кузова по меньшей мере к одному технологическому резервуару, где имеется пара арочных элементов для удаления платформы с направляющей. Кроме того, имеются приводные средства для приведения в действие арочных элементов и для ввода кузова в технологические резервуары. Арочные элементы установлены с возможностью подъема и опускания на разную величину с совершением ряда колебательных движений платформы, несущей на себе кузов, обеспечивая ввод кузова в технологический резервуар в наклонном положении. Изобретение обеспечивает повышение качества обработки кузовов. 2 з.п. ф-лы, 9 ил.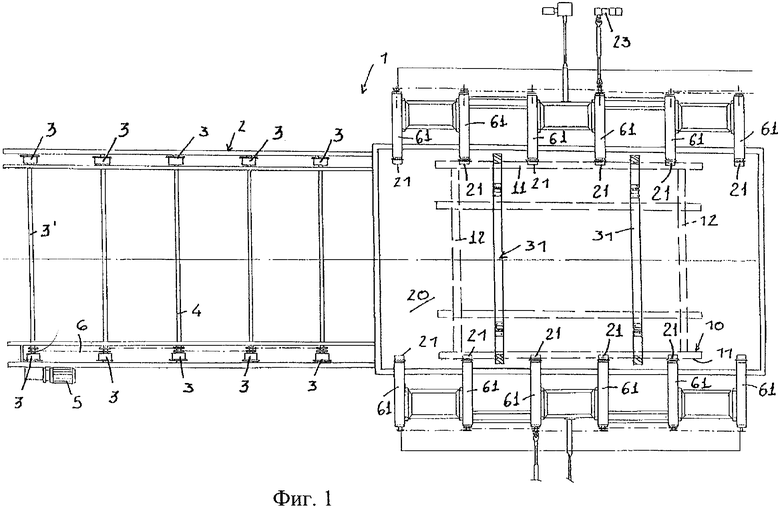
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ КУЗОВОВ АВТОМОБИЛЕЙ | 1995 |
|
RU2116234C1 |
| WO 02051695 A1, 04.07.2002 | |||
| Роликовый конвейер для продольного перемещения и вращения изделий цилиндрической формы | 1981 |
|
SU984946A1 |
| Устройство для программного управления шаговыми двигателями | 1988 |
|
SU1550479A1 |
| US 4831962 A, 23.05.1989 | |||
| DE 4302018 A1, 28.07.1994. | |||

