Изобретение относится к системам сброса или отделения объектов, преимущественно космических аппаратов (КА) и других полезных нагрузок (ПН), от несущих конструкций (адаптеров или приборных отсеков) ракет-носителей (РН) при их выводе на расчетную орбиту и может быть использовано в области ракетно-космической техники. Особенностью способа формирования системы отделения (СО) является его применение для отделения ПН с большим дисбалансом массы в поперечном направлении.
В результате анализа патентной и научно-технической литературы в качестве прототипа заявленного способа принято техническое решение по патенту RU 2151086 С1 от 20.06.2000 г., регистрационный номер заявки 99114863/28 от 07.07.1999 г. «Устройство для транспортировки и отделения ПН от космического объектам», в котором представлены устройство отделения ПН и реализуемый им способ формирования СО ПН.
Известный способ формирования СО заключается в установке механизма фиксации (удерживающего устройства) ПН и средств отделения ПН - пружинных толкателей между ПН и несущей конструкцией. Механизм фиксации выполнен в виде поворотных крюков, взаимодействующих с ПН, привода их раскрытия и пирозамка. Каждый из пружинных толкателей выполнен в виде штока, размещенного в корпусе, и пружины с регулировочным винтом. Толкатели устанавливают симметрично относительно продольной оси ПН, проходящей через ее геометрический центр. При установке продольные оси пружинных толкателей располагают параллельно продольной оси отделяемой ПН. При этом в момент отделения ПН пирозамком и пружинным приводом раскрытия обеспечивают одновременное срабатывание поворотных крюков механизма фиксации ПН с последующим включением в работу средств отделения (пружинных толкателей).
На этапе начальной подготовки и стыковки ПН с СО (перед закреплением ПН с помощью механизма фиксации) осуществляют тарирование (настройку толкателей на расчетные усилия, необходимые для отделения ПН с заданной скоростью) усилий штоков пружинных толкателей и при установке ПН осуществляют одновременное сжатие пружин толкателей посредством штоков. Такая регулировка усилий штоков толкателей и настройка их на расчетные усилия (номинальные в пределах допуска для каждого толкателя) обеспечивает после срабатывания механизма фиксации ПН незначительную расчетную начальную линейную скорость в пределах от 0,02 до 0,1 м/с, но не исключает угловые скорости вращения относительно поперечных осей, которые составляют 0,5 град/с, т.к. тарирование усилий штоков пружинных толкателей осуществляется без учета фактического смещения положения центра масс ПН и конкретного места положения толкателей по отношению к этому смещению. В результате происходит вращение (закручивание) ПН относительно поперечных осей при ее отделении от несущей конструкции.
Полученные возмущения по угловой скорости при отделении ухудшают условия последующей стабилизации и ориентации ПН на орбите функционирования в космическом пространстве, а также могут привести к сближению и взаимному соударению отделившейся ПН с последней ступенью РН.
Обычная в таких случаях компенсация дисбаланса массы ПН за счет установки на нее дополнительных балансировочных грузов, с одной стороны, не всегда возможна из-за высокой плотности компоновки приборов и аппаратуры в ограниченных объемах корпусов ПН, например, малых КА, с другой стороны, приведет к увеличению массы ПН и нагрузок на элементы СО.
Целью (задачей) предлагаемого способа формирования СО для отделения ПН является исключение (уменьшение) закручивания ПН (без увеличения массы ПН) со смещенным в поперечном направлении положением центра масс при ее отделении от РН.
Поставленная цель в предлагаемом способе формирования СО достигается путем введения следующих операций:
- перед закреплением (с помощью удерживающего устройства) полезной нагрузки на системе отделения определяют проекцию вдоль оси Х фактического положения центра масс отделяемой полезной нагрузки на плоскость ее разделения, характеризуемую смещениями Δу и Δz центра масс соответственно по поперечным осям Y и Z, проходящим через геометрический центр полезной нагрузки;
- толкатели в количестве четырех, попарно расположенные вдоль указанных поперечных осей, настраивают на расчетные усилия в зависимости от их положения по отношению к указанной проекции;
- при этом выбирают усилия толкателей, расположенных вдоль оси Y, согласно соотношениям


причем толкатель с усилием Р1 расположен ближе к указанной проекции центра масс, чем толкатель с усилием Р3;
- выбирают усилия толкателей, расположенных вдоль оси Z, согласно соотношениям


причем толкатель с усилием Р2 расположен ближе к указанной проекции центра масс, чем толкатель с усилием Р4,
где Р - номинальное усилие настройки регулируемых толкателей, необходимое для обеспечения линейной скорости отхода ПН при отсутствии смещения положения центра масс;
R - радиус окружности установки толкателей вокруг оси X.
Величины начальных усилий каждого толкателя предварительно определяют расчетным путем из известного условия равновесия объекта (тела), находящегося под действием приложенных к нему сил. Настройку каждого толкателя на расчетные начальные усилия проводят в процессе их регулировки перед установкой и закреплением ПН с помощью удерживающего устройства на СО.
Предлагаемая настройка каждою толкателя на определенное начальное усилие зависит от фактического положения центра масс ПН (точнее от проекции фактического положения центра масс ПН на плоскость ее отделения от РН). Фактическое положение центра масс ПН определяется по результатам проведения балансировочных работ и определения массово-центровочных характеристик ПН (при проведении балансировки определяются масса, положение центра масс по трем осям ПН, массовые моменты инерции ПН) и является обязательной операцией при предполетной подготовке любой ПН (КА, малых КЛ, спутников, отделяемых попутных нагрузок от базового КА) к пуску.
Следует отметить, что массово-центровочные характеристики реально изготовленной ПН в большинстве случаев отличаются от соответствующих характеристик, определенных расчетным путем, из-за погрешностей в величинах масс комплектующих ПН приборов, аппаратуры, силовой конструкции ПН, а также из-за погрешностей в их пространственном расположении на реально изготовленной ПН.
Но условиям отделения ПН устанавливается на несущую конструкцию РН в определенное положение, потому направление (ориентация) проекции фактического положения центра масс ПН на плоскость ее отделения известно, также как известна и величина этого смещения относительно геометрического центра, через который проходит продольная ось ПН. Значит, место положения каждого толкателя СО по отношению к проекции фактического положения центра масс ПН определено. Поэтому для компенсации неуравновешенного воздействия от дисбаланса массы ПН и исключения закручивания ПН после ее отделения необходимо провести настройку регулируемых толкателей на расчетные начальные усилия срабатывания соответствующей величины (с учетом их симметричного расположения на СО и с учетом параллельности их продольных осей продольной оси отделяемой ПН).
Для функционирования СО, сформированной и настроенной предложенным способом, обязательным условием является обеспечение одновременности освобождения и включения в работу всех толкателей, что может быть осуществлено установкой на СО одного удерживающего устройства (замка) или группы замков, синхронно расфиксируюшихся от одного механического привода или пиросредства.
На фигуре 1 показан вид на СО сбоку.
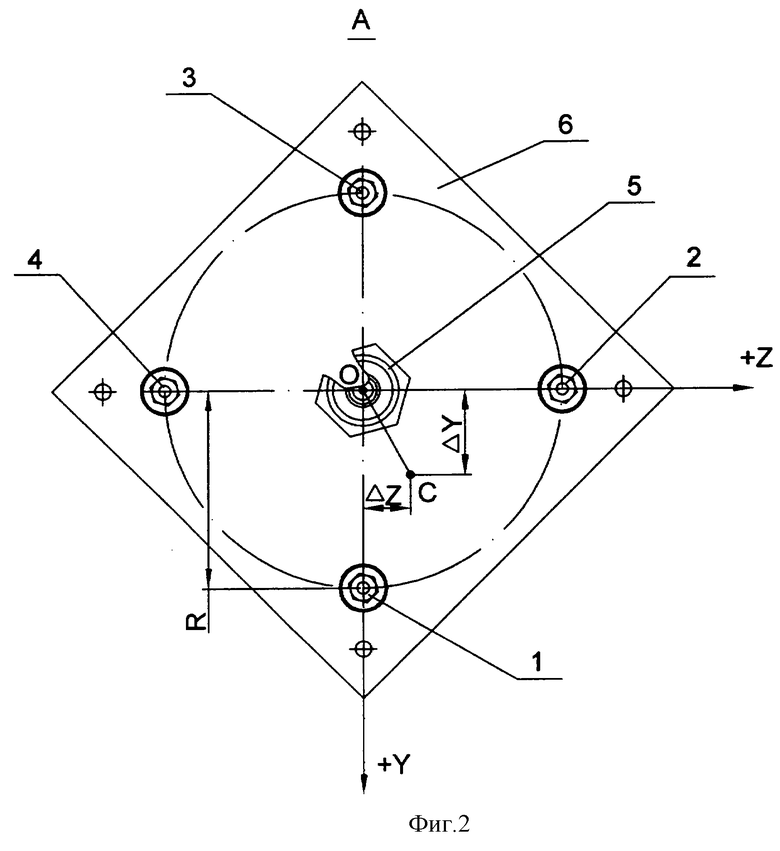
На фигуре 2 представлен вид на СО сверху (вид А на фигуре 1), показано взаимное расположение удерживающего устройства и группы из четырех толкателей в плане, при этом ПН условно не показана. Изображена проекция фактического (смещенного в поперечном направлении относительно продольной оси ПН) положения центра масс ПН на плоскость разделения - точка С.
СО состоит из четырех пружинных толкателей 1, 2, 3, 4 и удерживающего устройства 5, выполненного, например, в виде механического замка. Пружинные толкатели 1, 2, 3, 4 устанавливают по окружности радиуса R, а удерживающее устройство (замок) 5 - в центре окружности (точка О, см. фигуру 2) между несущей конструкцией 6 и ПН 7. Пружинные толкатели 1, 2, 3, 4 и удерживающее устройство 5 закрепляют на несущей конструкции 6, обеспечивая их взаимодействие (контакт) с ПН 7. Толкатели размещают симметрично относительно геометрического центра ПН (точка О, см. фигуру 2), через который проходит ее продольная ось X. Удерживающим устройством (замком) 5 обеспечивают одновременность срабатывания всех четырех толкателей после его расфиксации при отделении ПН. Следует отметить, что СО, содержащая четыре толкателя пружинного типа, является наиболее типичной и самой распространенной в практике разработки СО для отделения ПН. При формировании такой СО толкатели размещают симметрично (с шагом по углу 90°) относительно проекции геометрического центра ПН на плоскость разделения (относительно продольной оси Х ПН). При этом толкатели устанавливают таким образом, что их продольные оси параллельны продольной оси ПН. При такой установке средств отделения группа минимум из четырех толкателей позволяет скомпенсировать неуравновешенное воздействие от массового дисбаланса ПН одновременно по двум поперечным осям путем настройки толкателей на расчетные усилия в соответствии с предложенными выше соотношениями (1), (2), (3), (4).
Данные соотношения получены авторами из известного условия о равенстве статических моментов (равенства нулю суммарного статического момента) усилий толкателей относительно любой оси, проходящей через проекцию вдоль оси Х фактического положения центра масс ПН на плоскость разделения (известного условия равновесия объекта (тела), находящегося под действием приложенных к нему сил), с сохранением суммарной силы четырех толкателей, равной 4Р (где Р - номинальное усилие, необходимое для отделения ПН при отсутствии дисбаланса массы).
Для представленной на фигурах 1 и 2 системы отделения распределение усилий настройки толкателей приведено ниже:
P1=P(1+2 Δу/R) - усилие настройки толкателя 1,
Р2=P(1+2 Δz/R) - усилие настройки толкателя 2,
Р3=Р(1-2 Δу/R) - усилие настройки толкателя 3,
P4=P(1-2 Δz/R) - усилие настройки толкателя 4,
где Р - номинальное усилие настройки толкателей, необходимое для обеспечения линейной скорости отхода ПН при отсутствии смещения положения центра масс;
Δу и Δz - величины фактического смещения центра масс ПН по поперечным осям Y и Z соответственно (см. фигуру 2);
R - радиус окружности установки толкателей вокруг оси Х (см. фигуру 2).
Разница максимального и минимального усилия срабатывания пары толкателей, установленных на СО в диаметрально противоположные точки вдоль оси Y (пары толкателей 1 и 3), определяется соотношением

Разница максимального и минимального усилия срабатывания пары толкателей, установленных на СО в диаметрально противоположные точки вдоль оси Z (пары толкателей 2 и 4), определяется соотношением

Суммарное усилие срабатывания всех четырех толкателей СО, настроенных в соответствии с соотношениями (1), (3), (2), (4), равно

Анализ соотношений с (1) по (7) показывает, что пары толкателей можно настраивать на различные усилия, изменяющиеся в широком диапазоне, а именно от 0 до 2Р, при этом настройкой толкателей 1 и 2 на максимальные усилия, равные 2Р, а толкателей 3 и 4 на минимальные усилия, равные 0, можно компенсировать (исключить закручивание при отделении ПН) значительные смещения положения центра масс ПН, достигающих величины, равной половине радиуса (0,5 R) установки толкателей, что на порядок превышает поперечные эксцентриситеты ПН, обычно составляющие не более 5% радиуса установки толкателей, т.е. 0,05 R. Конструктивно в этом случае вместо толкателей 3 и 4 можно установить нерегулируемые упоры.
Распределение усилий по четырем толкателям в соответствии с соотношениями, приведенными выше, с сохранением суммарного усилия, равного 4Р, позволяет исключить (уменьшить) вращение ПН после отделения и обеспечивает отход ПН от РН с заданной линейной скоростью.
Для реализации способа формирования СО устанавливают регулируемые пружинные толкатели с возможностью настройки их рабочих усилий срабатывания в диапазоне от 0 до 2Р (где Р - номинальное усилие, необходимое для отделения ПН с заданной линейной скоростью при отсутствии дисбаланса массы ПН).
Формирование СО заявленным способом в процессе установки и крепления ПН на несущей конструкции РН производят следующим образом (при ориентации поперечного смещения центра масс ПН, например, между толкателями 1 и 2 - проекция на плоскость разделения в точке С, как показано на фигуре 2):
- для установки на СО используют толкатели с регулируемым рабочим усилием;
- толкатели 1, 2, 3, 4 автономно настраивают на усилия, предварительно определенные расчетным путем по соотношениям (1), (3), (2), (4) соответственно, и устанавливают в зоны (места), предназначенные для их размещения на несущей конструкции 6;
- устанавливают ПН 7 на несущую конструкцию 6 и закрепляют ее с помощью замка 5;
- настроенные толкатели 1, 2, 3, 4 подводят до контакта с ПН 7 (см. фигуру 1), сохраняя при этом усилия их настройки, и производят фиксацию корпусов толкателей относительно несущей конструкции 6.
Система отделения, сформированная предложенным способом, функционирует следующим образом.
После срабатывания удерживающего устройства (замка) 5 одновременно освобождаются и включаются в работу все четыре толкателя 1, 2, 3, 4, каждый из которых настроен на фактическое отрегулированное усилие срабатывания. Толкатели воздействуют на ПН 7 разными усилиями, но при этом суммарное усилие группы из четырех толкателей равно 4Р, которое обеспечивает отделение ПН 7 (отход ПН 7 от несущей конструкции 6 РН) с заданной линейной скоростью. Т.к. начальные усилия срабатывания толкателей определены с учетом равенства нулю статического момента усилий относительно любой поперечной оси, проходящей через проекцию фактического положения центра масс ПН 7 на плоскость разделения, то процесс отделения ПН 7 от несущей конструкции 6 произойдет без закручивания ПН 7.
Предложенная настройка регулируемых толкателей на различные расчетные усилия (определенные с учетом направления и величины смещения центра масс ПН) позволяет использовать серийно изготавливаемую СО, снабженную регулируемыми толкателями, для отделения ПН, имеющую эксцентриситет центра масс по поперечным осям до половины радиуса окружности установки толкателей. Увеличение нагрузок на отдельные толкатели и на зоны их контакта с ПН за счет настройки пружин толкателей на увеличенное усилие срабатывания при отделении ПН не является критичным, т.к. нагрузки на элементы ПН в зонах ее крепления на несущей конструкции с помощью удерживающих устройств (замков) значительно выше при полете на участке выведения и в случаях наземной эксплуатации в составе РН.
Предложенный способ формирования СО обладает существенными отличиями по сравнению с прототипом и позволяет отделять ПН с эксцентриситетом центра масс в поперечном направлении с минимальными угловыми возмущениями и без обычного в таких случаях увеличения массы ПН (отпадает необходимость установки дополнительных балансировочных грузов для компенсации имеющегося дисбаланса масс).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ С УЧЕТОМ ЭНЕРГИИ ПРУЖИННОГО ТОЛКАТЕЛЯ | 2016 |
|
RU2640498C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2003 |
|
RU2268208C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ СФЕРИЧЕСКОЙ ФОРМЫ | 2003 |
|
RU2276046C2 |
| УСТРОЙСТВО ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2015 |
|
RU2648522C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2009 |
|
RU2396191C1 |
| ПЛАТФОРМА ПОВОРОТНАЯ ДЛЯ КРЕПЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2003 |
|
RU2238888C1 |
| Устройство отделения для нескольких полезных нагрузок от одной ракеты-носителя | 2018 |
|
RU2680468C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОГО ГРУЗА ОТ БОРТА КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2471684C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2005 |
|
RU2293694C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2362714C2 |
Изобретение относится к способам стыковки объектов, преимущественно космических полезных нагрузок (ПН), имеющих дисбаланс массы в поперечном направлении, и их отделения от ракет-носителей (РН). Предлагаемый способ включает в себя определение расчетным путем величин начальных усилий срабатывания каждого пружинного толкателя, устанавливаемого на систему отделения ПН. Места установки толкателей попарно расположены вдоль поперечных осей ПН. Усилия толкателей выбирают из условия равенства нулю их суммарного статического момента относительно любой поперечной оси, проходящей через проекцию фактического положения центра масс ПН на плоскость ее отделения. При этом также выполняют требование, чтобы усилия толкателей, расположенных вдоль одной из поперечных осей, зависели от смещения центра масс ПН по этой оси и не зависели от смещения центра масс ПН по другой оси. Технический результат изобретения состоит в уменьшении угловых возмущений объекта относительно его поперечных осей при отделении от РН, а также в исключении соударения отделившегося объекта с последней ступенью РН. 2 ил.
Способ формирования системы отделения полезной нагрузки с поперечным дисбалансом массы, состоящей из удерживающего устройства и средств разделения, выполненных в виде группы пружинных толкателей с регулируемыми усилиями, параллельными продольной оси Х полезной нагрузки, проходящей через ее геометрический центр, заключающийся в том, что удерживающее устройство и толкатели устанавливают между полезной нагрузкой и несущей конструкцией симметрично относительно указанной продольной оси, причем перед закреплением полезной нагрузки удерживающим устройством настраивают толкатели на расчетные усилия, обеспечивая удерживающим устройством одновременность срабатывания всех толкателей, отличающийся тем, что перед закреплением полезной нагрузки определяют проекцию вдоль оси Х фактического положения центра масс полезной нагрузки на плоскость ее разделения, характеризуемую смещениями Δу и Δz центра масс соответственно по поперечным осям Y и Z, проходящим через геометрический центр полезной нагрузки, а толкатели в количестве четырех, попарно расположенные вдоль указанных поперечных осей, настраивают на расчетные усилия в зависимости от их положения по отношению к указанной проекции, выбирая усилия толкателей, расположенных вдоль оси Y, согласно соотношениям
P1=P(1+2 Δу/R),
Р3=Р(1-2 Δу/R),
причем толкатель с усилием P1 расположен ближе к указанной проекции центра масс, чем толкатель с усилием Р3, а усилия толкателей, расположенных вдоль оси Z - согласно соотношениям
P2=P(1+2 Δz/R),
P4=P(1-2 Δz/R),
причем толкатель с усилием Р2 расположен ближе к указанной проекции центра масс, чем толкатель с усилием Р4, где Р - номинальное усилие настройки толкателей, необходимое для обеспечения линейной скорости отхода ПН при отсутствии смещения положения центра масс; R - радиус окружности установки толкателей вокруг оси X.
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| ОТДЕЛЯЮЩЕЕСЯ ВЕДУЩЕЕ УСТРОЙСТВО ПОДКАЛИБЕРНОГО РЕАКТИВНОГО СНАРЯДА | 2000 |
|
RU2176376C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
| US 4776539 A, 11.10.1988 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

