Изобретение относится к космической технике и может быть использовано для освобождения отделяемых в процессе эксплуатации и многоразовой отработки силовых крупногабаритных агрегатов, например головных обтекателей, отсеков и ступеней ракет-носителей, подвесных баков летательных аппаратов, космических аппаратов и других полезных нагрузок (ПН).
Наиболее близким к заявленному является способ, включающий в себя определение расчетным путем величин начальных усилий срабатывания каждого пружинного толкателя, устанавливаемого на систему отделения ПН. На начальной подготовке каждый пружинный толкатель устанавливается с учетом положения центра масс ПН. Перед закреплением ПН проводится настройка пружинного толкателя при помощи шпильки на расчетные усилия, необходимые для отделения ПН с заданной скоростью (патент RU 2293691 С2 от 20.02.2007 г.).
К недостаткам устройства-прототипа следует отнести то, что пружинные толкатели настраивают на расчетное усилие в зависимости от их положения по отношению к центру масс ПН без учета энергии пружины толкателя, что приведет к закручиванию ПН.
Для выбора усилия пружинных толкателей устройства-прототипа (к примеру, расположенные вдоль оси Y) используют формулы (см. фиг. 2 патента RU 2293691 С2)
где Р - номинальное усилие настройки пружинных толкателей, необходимое для обеспечения линейной скорости отхода ПН при отсутствии смещения центра масс;
Δу - величина фактического смешения центра масс ПН по оси Y;
R - радиус окружности установки пружинных толкателей вокруг оси X.
Для определения равенства соотношения первого пружинного толкателя относительно второго пружинного толкателя с учетом расположения расчетного центра масс ПН допустим
Р=100 кгс;
R=1000 мм;
Δу=100 мм
L1=R-Δy=1000-100=900 мм
L2=R+Δy=1000+100=1100 мм
P1⋅L1=P3⋅L2
120⋅900≠80⋅1100
Выводы
1. Данное равенство является неверным, но если из формул №1 и №2 исключить двойку, то получим

P1⋅L1=P3⋅L2
110⋅900=90⋅1100
При этом не учитывается запасенная энергия в каждом толкателе, что приведет к закручиванию ПН.
2. При применении одинаковых пружинных толкателей получаем, что увеличивая силу - увеличиваем ход пружины толкателя, уменьшая силу - уменьшаем ход пружины толкателя. Поэтому при срабатывании после завершения работы пружины толкателя с меньшим ходом вторая пружина продолжает толкать ПН, что приведет к ее закручиванию.
3. Если в пружинном толкателе сохранить ход одинаковым, то распределение сил на всем ходе пружинного толкателя уже не соответствует равенству статических моментов, т.к. сила меняется, а плечо действия остается неизменным.
4. Если предположить, для наглядности, что ход пружин с меньшим усилием обеспечивает в конце Р2=0, то получим

К достоинству устройства-прототипа следует отнести то, что пружинный толкатель регулируется на различное расчетное усилие.
Целью изобретения является применение способа отделения полезной нагрузки с учетом энергии пружинного толкателя.
Цель изобретения достигается тем, что в способе отделения полезной нагрузки с учетом энергии пружинного толкателя, включающем использование удерживающего устройства и средств разделения, выполненных в виде группы пружинных толкателей, с помощью удерживающего устройства обеспечивают удержание и одновременное срабатывание всех пружинных толкателей, согласно изобретению в зависимости от фактического центра масс полезной нагрузки (ПН) или геометрического центра масс применяют подбор пружинных толкателей с различной энергией, для этого:
в каждом пружинном толкателе определяют действительную энергию пружины согласно формуле

располагают пружинные толкатели с максимальной или минимальной энергией диаметрально противоположно друг другу и определяют смещение энергии пружин толкателей Az, Ау по осям z, у по формулам
определяют радиус смещения энергии пружин толкателей относительно геометрического центра масс по формуле
С целью исключения закручивания ПН относительно его продольной оси располагают пружинные толкатели попеременно с правой и левой навивкой.
Техническая сущность предложенного способа поясняется фигурами.
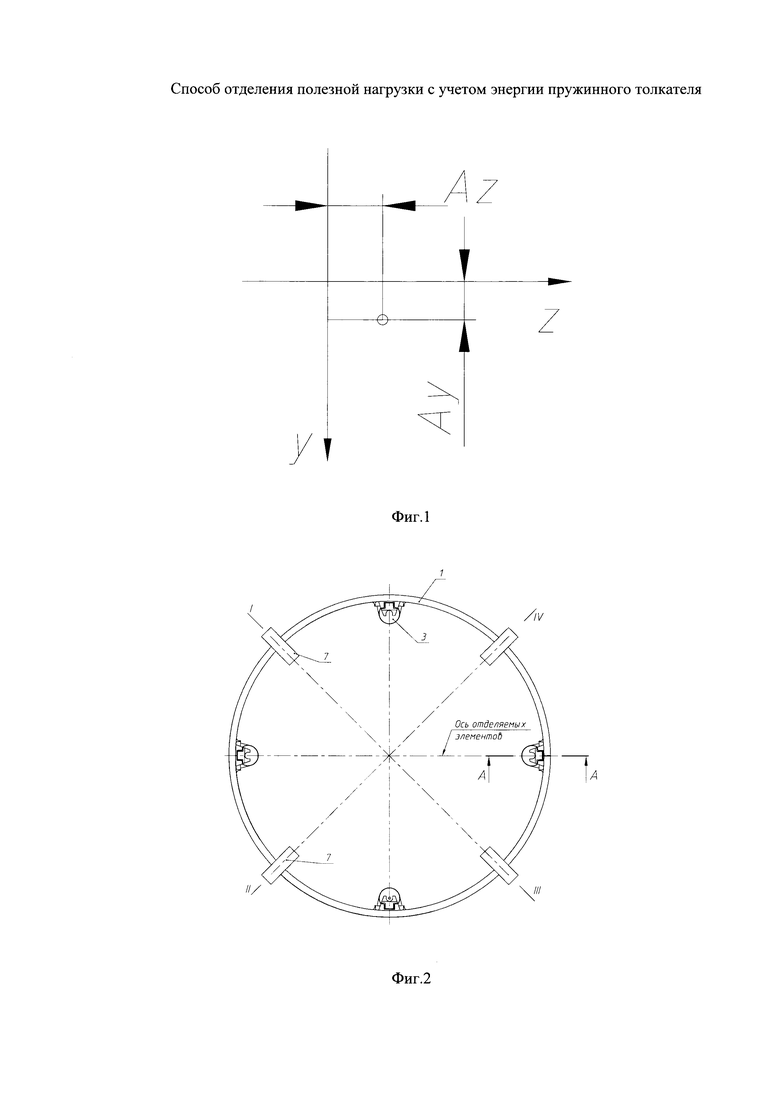
На фиг. 1 изображено смещение относительно геометрического центра масс ПН.
На фиг. 2 показана возможная расстановка пружин в изделии.
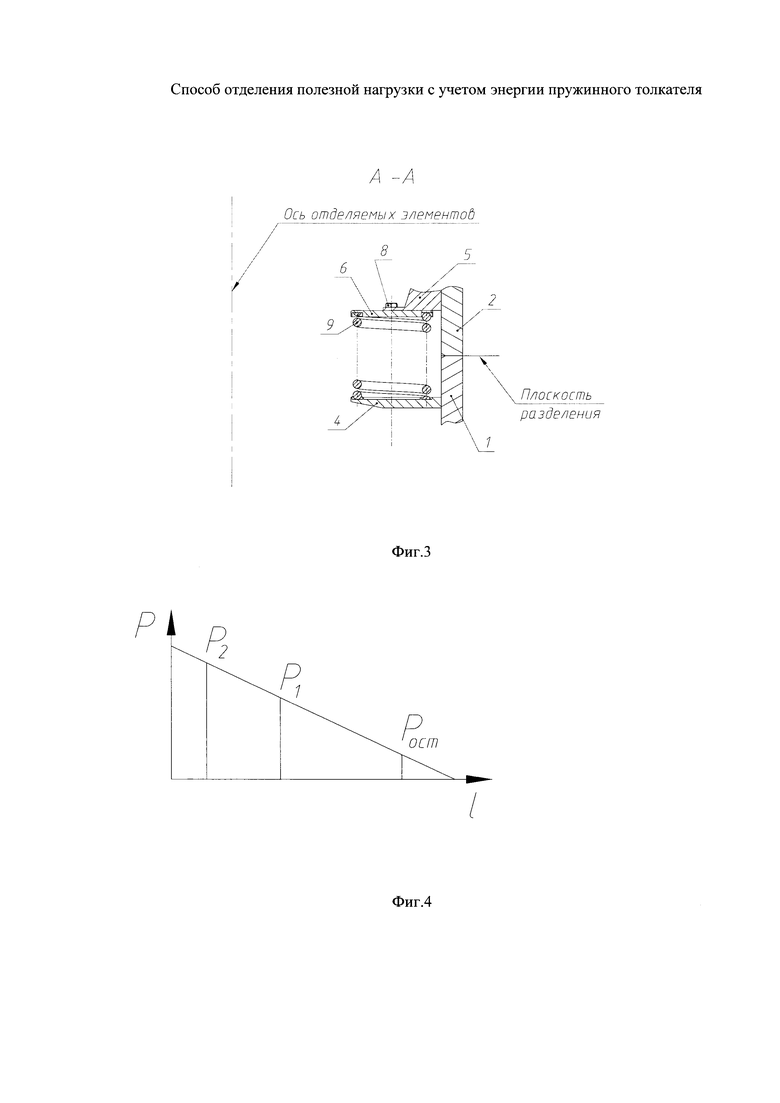
На фиг. 3 показан толкатель в рабочем положении.
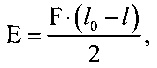
На фиг. 4 изображено изменение усилия пружины.
В каждый момент процесса отделения учитывается зависимость усилия толкателя, необходимого для обеспечения линейной скорости (Р) отхода ПН и длины пружины (l). При этом сила в пружинном толкателе уменьшается пропорционально ходу: сначала усилие пружины при рабочей деформации (P2), далее усилие пружины при предварительной деформации (P1), затем остаточное усилие пружины (Рост). Поэтому необходимо учитывать запасенную энергию в каждом толкателе (фиг. 4).
Имея набор пружинных толкателей с различной энергией (из-за погрешности изготовления), соблюдается условие подбора, где суммарный вектор энергии пружинных толкателей располагается в геометрическом центре ПН.
При необходимости, зная фактический центр масс ПН, можно применить подбор расстановки пружинных толкателей с различной энергией, где суммарный вектор пружинных толкателей располагается в проекции фактического центра масс ПН.
Осуществление способа.
1. Относительно геометрического центра масс подбирается вектор энергии пружинного толкателя.
а) Определяется действительная энергия для каждого пружинного толкателя по формуле
где F - сила пружины, сжатой на высоту l, Н;
l - высота поджатой пружины, м;
l0 - высота свободной пружины, м.
б) Для исключения закручивания ПН располагаем пружинные толкатели с максимальной или минимальной энергией диаметрально противоположно друг другу.
в) Определяем смещение энергии пружин толкателей Az, Ау по осям z, у по формулам


Z, Y - геометрические параметры, определяющие расположение пружинных толкателей при применении их для отделения ПН, м.
г) Определяем радиус AR смещения энергии пружинных толкателей относительно геометрического центра масс по формуле

Смещение относительно геометрического центра масс ПН является минимальным.
2. С целью исключения закручивания ПН относительно его продольной оси располагаем пружинные толкатели попеременно с правой и левой навивкой.
Пружинные толкатели 3 устанавливают симметрично относительно геометрического центра, по окружности радиуса R и удерживаются удерживающим устройством 7, выполненным в виде механического замка. Нижняя часть пружины 9 закрепляется на кронштейн 4, который закреплен на устройстве отделения 1 параллельно плоскости разделения. Пружина толкателя 3 упирается в тарель 6, которая удерживается болтом 8 на кронштейне 5. Кронштейн 5 закреплен на ПН 2 параллельно плоскости разделения. Компоновка установки пружинного толкателя 3 может изменяться в зависимости от требований к процессу отделения.
После срабатывания удерживающего устройства 7 одновременно освобождаются и включаются в работу все пружинные толкатели 3, отделяя ПН 2 от устройства отделения 1 с заданной линейной скоростью исключая закручивание относительно продольной оси ПН 2.
Таким образом, учитывая энергию каждого пружинного толкателя достигается отделение с заданной линейной скоростью ПН и исключение закручивания ПН относительно продольной оси.
Подбор пружинных толкателей позволяет использовать серийное изготовление пружинных толкателей со значительной погрешностью в энергетике при изготовлении, тем самым фактически исключая выбраковку пружин толкателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИСТЕМЫ ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2004 |
|
RU2293691C2 |
| Настраиваемый пружинный толкатель | 2024 |
|
RU2831550C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ СФЕРИЧЕСКОЙ ФОРМЫ | 2003 |
|
RU2276046C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2003 |
|
RU2268208C2 |
| Устройство отделения для нескольких полезных нагрузок от одной ракеты-носителя | 2018 |
|
RU2680468C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2005 |
|
RU2293694C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2009 |
|
RU2396191C1 |
| УСТРОЙСТВО ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2015 |
|
RU2648522C2 |
| ВЕДУЩЕЕ УСТРОЙСТВО С ПРУЖИНАМИ КРУЧЕНИЯ | 2006 |
|
RU2333455C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОГО ГРУЗА ОТ БОРТА КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2471684C1 |
Изобретение относится к космической технике и может быть использовано для освобождения отделяемых в процессе эксплуатации и многоразовой отработки силовых крупногабаритных агрегатов, например головных обтекателей, отсеков и ступеней ракет-носителей, подвесных баков летательных аппаратов, космических аппаратов и других полезных нагрузок (ПН). В способе отделения полезной нагрузки применяют подбор пружинных толкателей с различной энергией, при этом пружинные толкатели с максимальной и минимальной энергией располагают диаметрально противоположно друг другу, определяют смещение энергии пружин толкателей и радиус смещения энергии пружин толкателей относительно геометрического центра масс. С целью исключения закручивания ПН относительно продольной оси продольные толкатели располагают попеременно с правой и левой навивкой. Техническим результатом изобретения является обеспечение отделения ПН с заданной линейной скоростью и исключение закручивания ПН относительно продольной оси. 1 з.п. ф-лы, 4 ил.
1. Способ отделения полезной нагрузки с учетом энергии пружинного толкателя, включающий использование удерживающего устройства и средств разделения, выполненных в виде группы пружинных толкателей, в котором с помощью удерживающего устройства обеспечивают удержание и одновременное срабатывание всех пружинных толкателей, отличающийся тем, что в зависимости от фактического центр масс полезной нагрузки (ПН) или геометрического центра масс применяют подбор пружинных толкателей с различной энергией, для этого:
в каждом пружинном толкателе определяют действительную энергию пружины согласно формуле
где F - сила пружины, сжатой на высоту l, Н;
l - высота поджатой пружины, м;
l0 - высота свободной пружины, м;
располагают пружинные толкатели с максимальной или минимальной энергией диаметрально противоположно друг другу и определяют смещение энергии пружин толкателей Az, Ay по осям z, y по формулам


где Z, Y - геометрические параметры, определяющие расположение пружинных толкателей при применении их для отделения ПН, м,
определяют радиус смещения энергии пружин толкателей относительно геометрического центра масс по формуле
2. Способ по п. 1, отличающийся тем, что с целью исключения закручивания ПН относительно его продольной оси располагают пружинные толкатели попеременно с правой и левой навивкой.
| СПОСОБ ФОРМИРОВАНИЯ СИСТЕМЫ ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2004 |
|
RU2293691C2 |
| УСТРОЙСТВО РАЗДЕЛЕНИЯ | 2007 |
|
RU2342291C1 |
| US 4776539 A1, 11.10.1988 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 4506852 A1, 26.03.1985. | |||

