Изобретение относится к области управления реактором полунепрерывного действия (РПНД) при одновременной дозировке двух компонентов и касается, в частности, регулируемой подачи разнофазных компонентов (жидкого и сыпучего) в импульсном режиме по параметрической программе в функции от текущего значения обобщенного параметра с учетом электропроводности и диэлектрической проницаемости реакционной массы (РМ), что найдет широкое применение в химической, химико-фармацевтической, лакокрасочной, витаминной, пищевой и других специализированных отраслях промышленности в производстве промежуточных полупродуктов и целевых компонентов.
Уже известно большое количество способов и устройств по управлению РПНД, каждый из которых находит область применения исходя из особенностей кинетики и термодинамики протекающего процесса фазового состояния дозируемых компонентов, технологического и аппаратурного оформления процесса, а также достигнутым уровнем научно-технического прогресса к настоящему времени.
1. А.с. №№332852, 498957, 521003, 539598, 664681, 735293, 889077, 978114, 1101293, 1118405, 1181701, 1230667, 1376510, 1601973, 1606178, 1634659, 1690840, 1736600, 1804903.
2. Автоматическое регулирование и контрольно-измерительные приборы в промышленности основной химии / Под ред. В.С.Шермана - Л., 1975.
- Беркман Б.Е. / Промышленный синтез ароматических соединений и аминов. - М., 1964.
- Виденеев Ю.Д. Дозаторы непрерывного действия - М., 1978.
- Манусов Е.Б. Контроль и регулирование технологических процессов лакокрасочных производств - М., 1977.
- Соколов М.В., Гуревич А.Л. Автоматическое дозирование жидких сред. - Л., 1987.
3. Перемешивание жидких материалов в аппаратах со сложным законом движения мешалок /Ю.В.Мартынов и др. "Химическая промышленность" - 1983. С.43-45/.
Известно устройство, реализующее способ управления процессом перемешивания в РПНД, содержащее якорную и две пропеллерные мешалки, системы регулируемых приводов и измерения разности температур РМ между центром реактора (у вала тихоходной мешалки) и периферией (у стенки реактора) [а.с. СССР №889077, публ. 1981]. Недостатком его является потребность в регулируемых приводах для каждого типа мешалок и необходимость измерения разности температур для выработки корректирующих управляющих воздействий, что значительно усложняет структуру регулирующего контура, снижающего надежностные показатели устройства.
Известен способ автоматического управления технологическим процессом в РПНД с приведенным устройством по его реализации, в котором частоту выдачи доз, объем единичной дозы и скорости вращения мешалки корректируют по уровню дозируемого жидкого компонента в расходной емкости (а.с. СССР 498957, публ. 1976).
Недостатком его считается усложненная трехканальная структура управления отдельными контурами, что не способствует сокращению длительности процесса в условиях широкого изменения вязкости РМ.
Известно устройство управления РПНД, содержащее расходные емкости, датчики уровня и температуры, таймеры, соответствующие регулирующие контуры (а.с. СССР, публ. 1985).
К недостаткам приведенного устройства относятся наличие регулирующего контура по температуре РМ, снижающего мощность теплосъема и, тем самым, увеличивающего длительность процесса, а применение таймеров для выработки управляющих воздействий не учитывает количественных и качественных изменений, происходящих с РМ, что препятствует корректировке управляющего сигнала в сторону сокращения длительности процесса.
В качестве еще одного аналога по данному изобретению принято устройство, описанное в статье "Автоматизированная система управления процессами окисления и ацетилирования в реакторе полунепрерывного действия", опубликованной в химико-фармацевтическом журнале, №9, 1994, с.56-59, в которой изложены как описание установки, так и устройства по ее управлению.
Установка содержит реактор с рубашкой, якорной мешалкой, клапаном разгрузки реактора, расходную и мерную емкости жидкого компонента, а также бункер со шнековым питателем для сыпучего компонента, электродвигатели с редукторами якорной мешалки и шнекового питателя.
Устройство по управлению реактором реализовано на использовании датчиков: температуры в реакторе, работающего с позиционным регулятором, уровня в расходной емкости, блока частотно-импульсной дозировки, входного и сливного отсечных клапанов обратного и прямого принципа действия, двух электропневматических преобразователей (ЭПП), магнитного пускателя двигателя шнекового питателя.
Блок частотно-импульсной дозировки включает в себя установочный и измерительный генераторы импульсов, два интегратора, триггер, логический элемент "ЗАПРЕТ", три усилителя управляющего сигнала.
Недостатками приведенного устройства являются как значительная длительность дозировки, обусловленная использованием только одной тихоходной якорной мешалки, так и фиксированной подачи жидкого и сыпучего компонента без учета увеличивающейся поверхности теплосъема по мере увеличения степени заполнения реактора при дозировке обоих компонентов.
Кроме того, отдаленность расположения ЭПП от пневмоприводов отсечных клапанов снижает быстродействие в выработке управляющих сигналов, что может послужить причиной возникновения аварийного режима.
В качестве ближайшего аналога по данному изобретению принят патент 2239223, публ. 2004 г., в котором изложены особенности технологического исполнения установки и специфики устройства по ее управлению.
Установка содержит реактор с якорной и двумя пропеллерными мешалками, клапаном разгрузки, расходную емкость "для жидкого компонента, бункер со шнековым питателем для сыпучего компонента, электродвигатели для пропеллерных мешалок и электродвигатели с редукторами для якорной мешалки и шнекового питателя, а также дозатор двухстороннего действия.
Устройство по управлению РПНД реализовано на использовании датчиков температуры в реакторе, уровня и давления в расходной емкости веса бункера с сыпучим компонентом, микропроцессорного контроллера, частотно-импульсной дозировки, алгоритм которой реализован программированием в микропроцессорном контроллере, вибрационного побудителя расхода сыпучего компонента со сканирующей частотой и амплитудой, управляемого статическим преобразователем отсечных и трехходовых (ТХК) клапанов ЭПП.
Недостатком приведенного устройства является усложненная структура частотно-импульсной дозировки, снижающая его надежностные показатели, и отсутствие более адекватной информационной системы по контролю протекания процесса, как за характером; так и по корректировке производительности дозатора и изменения задания регулятору давления в расходной емкости, что может вызвать аварийные режимы.
Задачей данного изобретения является повышение надежности работы устройства. Поставленная задача решается применением упрощенного алгоритма частотно-импульсной дозировки с переменным интегрированием импульсов, реализованного в микропроцессорном контроллере установкой концевых выключателей на стойке входного и выходного трехходовых клапанов (ТХК) дозатора для фиксирования одного из крайних положений их штоков и определения момента переключения управляющего воздействия на противоположное перемещение плавающего поршня для очередной выдачи единичной дозы, вводом нового информационного канала по контролю электрофизического параметра РМ и выработке корректирующего воздействия для увеличения производительности дозаторов жидкого и сыпучего компонентов. Сущность изобретения состоит в том, что предложено устройство автоматического управления РПНД, содержащее расходную емкость для жидкого компонента, бункер с сыпучим компонентом, снабженный шнековым питателем и вибрационным побудителем расхода со сканирующей частотой и амплитудой, управляемым статическим преобразователем частоты и амплитуды в реакторе, снабженном якорной и двумя пропеллерными мешалками, датчики уровня и давления в расходной емкости, тензометрический датчик веса бункера с сыпучим компонентом, отсечные клапаны подачи жидкого компонента в реактор, ЭПП, предназначенные для управления пневмоприводами клапанов, микропроцессорный контроллер, предназначенный для программной реализации функций частотно-импульсной дозировки и регулятора давления в расходной емкости, для формирования управляющих воздействий, подаваемых на ЭПП и через соответствующие магнитные пускатели четырехканального блока на электродвигатели мешалок реактора, шнекового питателя, а через статический преобразователь частоты и амплитуды на вибрационный побудитель расхода, при этом расходная емкость снабжена нижним сливным патрубком и верхним трехходовым регулирующим клапаном, вход которого через соответствующий дроссельный вентиль соединен с линией подачи сжатого воздуха, а выходы связаны соответственно с воздушной полостью расходной емкости и через соответствующий дроссельный вентиль с атмосферой, причем нижний сливной патрубок смещен относительно оси расходной емкости, поднят косым срезом входного участка относительно днища расходной емкости и через соответствующий отсечной клапан, управляемый статическим преобразователем, связан с входом дозатора, выполненного в виде перепускного цилиндра с плавающим поршнем и коническими торцевыми частями с запирающими шаровыми клапанами, снабженного трехпатрубковыми левым и правым коллекторами, центральные патрубки которых соединены с осевыми отверстиями конических торцевых частей перепускного цилиндра, нижние патрубки - с выходными отверстиями входного трехходового клапана, а верхние патрубки связаны с входными отверстиями выходного ТХК, причем вход входного ТХК соединен последовательно через соответствующий отсечной клапан с нижним сливным патрубком расходной емкости, а выход выходного трехходового клапана связан с первым патрубком, а выход шнекового питателя соединен со вторым патрубком реактора, при этом выходы датчиков температуры уровня, давления и тензометрическото датчика веса соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессорного контроллера, устройство дополнительно содержит высокочастотный датчик электропроводности реакционной массы, два концевых выключателя, установленные на корпусах входного и выходного ТХК дозатора, причем выход с датчика электропроводности соединен с пятым входом, выход с концевого выключателя входного ТХК клапана дозатора связан с шестым входом, а выход с концевого выключателя выходного ТХК дозатора направлен к седьмому входу микропроцессорного контроллера, при этом выход от высокочастотного датчика электропроводности связан со входами на изменение задания регулятору давления и генератору импульсов.
Сущность изобретения поясняется функциональной схемой устройства управления РПНД (фиг.1), функциональной схемой управления частотно-импульсным дозатором с плавающим поршнем двухстороннего действия (фиг.2), структурной схемой блока частотно-импульсной дозировки сыпучего и жидкого компонентов (фиг.3), циклограммой работы частотно-импульсной дозировки при подаче сыпучего и жидкого компонентов (фиг.4)) и графиками падения уровня дозируемого жидкого компонента в расходной емкости, веса дозируемого сыпучего компонента в бункере, возрастания поверхности теплообмена в РПНД и электрографического параметра (электропроводности) РМ в зависимости от степени заполнения реактора (фиг.5).
В порядке обоснования соответствия изобретения критерию "промышленная применимость" приводим следующие доказательства.
1. Существующий уровень автоматизации РПНД остается до сих пор весьма невысоким из-за значительной сложности последнего, как объекта управления, и потенциальной опасности самих экзотермических процессов, проводимых в нем. Сложность РПНД, как объекта управления, обусловлена переменными степенью заполнения реактора и составом РМ, что предопределяется нестационарностью динамических характеристик по управляющему каналу, а также необходимостью дозировки разнофазных компонентов.
Потенциальная опасность экзотермических процессов, проводимых в РПНД, состоит в том, что при стечении определенных отрицательных обстоятельств скрытая в громадной концентрации межатомная энергия связи, таящаяся в исходных, и в особенности конечных продуктах синтеза, может перейти в лавинообразную реальную энергию взрыва с тяжелым материальным ущербом.
Поэтому разработка более совершенных устройств автоматического управления объектами подобного класса, с точки зрения выбора безопасной стратегии поведения процесса, является весьма актуальным решением указанной проблемы.
2. При совместной дозировке разнообразных по фазовому состоянию компонентов (жидкого и сыпучего) возникает опасность преждевременной агломерации, т.е. комкования мелких частиц в более крупные, что затрудняет протекание гетерогенной реакции между ними.
Кроме того, при дозировке подобных компонентов в режиме непрерывной подпитки происходит постоянное вспенивание РМ, что отрицательным образом сказывается на эффективности протекания процесса, уменьшая степень загрузки реактора и удлиняя процесс дозировки компонентов.
3. Устранение агломерации достигается применением в комбинации тихоходной якорной мешалки и двух быстроходных пропеллерных мешалок. Такое сочетание в одном реакторе мешалок разного типа положительным образом сказывается на перемешивании РМ с большим диапазоном изменения вязкости (1·10-3:100) Па·с.
В этом случае, когда вязкость РМ изменяется незначительно (1·10-3:4) Па·с - с наибольшей эффективностью используются две быстроходные пропеллерные мешалки, а тихоходная якорная мешалка в этом случае выполняет функцию отражательных передвижных перегородок, способствуя дополнительной турбулизации РМ и, тем самым, улучшая условия тепло- и массообменов в реакторе.
Когда же вязкость реакционной массы повысится до более высокого значения (>4 Па·с), работа тихоходной якорной мешалки начинает протекать более эффективно, способствуя существенному улучшению перемешивания реакционной массы, при этом продолжающаяся работа двух быстроходных пропеллерных мешалок препятствует образованию застойных зон.
4. Дополнительно агломерацию мелких частиц сыпучего компонента можно уменьшить с использованием системы частотно-импульсной дозировки двух разнофазных компонентов, момент выдачи единичных доз которых в реактор строго синхронизирован между собой. Такой режим их подачи дополнительно устраняет чрезмерное вспенивание РМ, так как каждая последующая подача единичных доз производится с частотой, когда дозы предыдущей их выдачи уже прореагировали между собой. Это исключает накопление непрореагировавшей РМ массы в реакторе и тем самым предотвращает возникновение аварийного режима.
5. Определенные трудности возникают при подаче жидкого агрессивного компонента, отличающегося к тому же повышенной вязкостью, и возможным наличием посторонних механических примесей в нем. Повышенная вязкость такого компонента среды создает ненужный дросселирующий эффект при его подаче в реактор, что удлиняет процесс дозирования; наличие же механических включений может стать причиной либо неуправляемого слива дозируемого компонента в реактор из-за попадания их на опорную поверхность седла под шток отсечного клапана, когда он не может полностью герметично закрыться, либо к существенному уменьшению подачи дозируемого компонента в реактор по причине частичной закупорки подающего патрубка. Подача жидкого дозируемого компонента последовательно через входной ТХК, перепускной цилиндр с плавающим поршнем, выходной ТХК, работающий с входным в противофазе, сводит вышеуказанные недостатки к минимуму.
6. Установка концевых выключателей на боковых стойках обоих ТХК для фиксирования достижения токами своих крайних положений, более точно определяет момент выдачи управляющего воздействия на противоположное перемещение плавающего поршня дозатора для выдачи единичной дозы жидкого компонента и одновременное включение двигателя шнекового дозатора с побудителем расхода на бункере при выдаче единичной дозы сыпучего компонента. Это исключает как режим проскока, когда один из компонентов не выдается, так и режим холостого хода, когда оба дозатора не срабатывают. Кроме того, применение концевых выключателей упрощает программную реализацию системы частотно-импульсной дозировки в микропроцессорном контроллере, что повышает надежность устройства.
7. Установка в расходной емкости заборного патрубка выше ее днища и изогнутого под прямым углом с косым срезом в сторону днища на ее горизонтальном участке исключает попадание твердых посторонних частиц, присутствующих в дозируемом жидком компоненте, непосредственно на опорную поверхность седла под шток переключающих ТХК, что предотвращает отказы в их работе. В этом случае загрязненная примесь оседает на днище расходной емкости и по окончании процесса удаляется через свой сливной ОК.
8. Самой медленной стадией технологического процесса является массопередача. Суммарная площадь межфазной поверхности между жидким и твердым компонентами является функцией степени перемешивания и концентрацией разнофазных реагирующих компонентов.
Повышение интенсивности перемешивания оказывает непосредственное воздействие на общую скорость гетерогенного превращения.
Без интенсивного перемешивания и импульсного режима подачи разнофазных компонентов гетерогенные процессы протекают с малой скоростью и с пониженным выходом целевого продукта.
Перемешивание с использованием сочетания тихоходной (якорной) и быстроходных (пропеллерных) мешалок совместно с импульсным режимом подачи компонентов приводит к уменьшению толщины диффузионного слоя, который должны преодолеть взаимодействующие молекулы разнофазных компонентов и к кратковременному увеличению их локальной концентрации, что весьма существенно ускоряет медленную стадию гетерогенного превращения.
Скорость реакций массообменных процессов Rп при наличии интенсивного перемешивания определяется следующим выражением:

где Кп - константа скорости процесса;
Rд - скорость диффузионного процесса, кмоль/с;
Rx - скорость химической реакции, кмоль/с.
Скорость реакции массообменных процессов Rn при импульсном режиме подачи компонентов будет равна:

где Ки - константа скорости процесса при импульсной дозировке.
Суммарная скорость массообменного процесса Rc при наличии интенсивного перемешивания в сочетании с импульсным режимом подачи компонентов будет иметь следующий вид:
где Кс - константа скорости процесса при совместном воздействии двух факторов, причем Кс>Кп>Ки.
Очевидно при Км<Ки<Кс возрастание скорости реакции будет протекать в следующей последовательности: Rc>Rи>Rм>Rx>Rд.
9. Высокочастотная кондуктометрия (диэлькометрия) относится к электрохимическим анализаторам РМ, для которых значение выходного сигнала определяется электрохимическими процессами, происходящими в погруженных в РМ электродных системах.
Метод высокочастотной бесконтактной кондуктометрии основан на взаимодействии электромагнитного поля высокой частоты (105:109 Гц) с анализируемой проводящей РМ, омывающей датчик емкостного типа с изолирующим покрытием измерительного электрода, В результате такого взаимодействия изменяется импеданс ячейки датчика, который функционально связан не только с электрическими свойствами РМ - удельной электрической проводимостью, но и с ее диэлектрической проницаемостью, т.е. с концентрацией одного из компонентов.
Это позволяет корректировать частоту выдачи доз обоих компонентов в сторону увеличения их расхода по мере возрастания значения обобщенного сигнала с учетом значения электропроводности и диэлектрической проницаемости РМ, поскольку между значением указанного сигнала и степенью заполнения реактора существует однозначная зависимость. Датчик высокочастотного кондуктометра прост по устройству и отличается незначительными габаритами, а текущее значение сигнала позволяет контролировать как регламентный режим в протекании процесса, так и появление аварийного режима, вызванного температурным, дозировочным или гидродинамическим отклонением, а возможно и аварийным их воздействием.
10. Применение МПК с малой степенью интеграции, снабженного дисплеем и принтером, позволяет реализовать выбранный алгоритм частотно-импульсной дозировки и отказаться от установки громоздких щитов с вторичными приборами и релейными блоками, что существенно обеспечивает более высокие метрологические и надежностные характеристики устройства управления РПНД.
11. Расположение ЭПП непосредственно у пневмопривода ОК и ТХК немного увеличивает быстродействие в передаче управляющих воздействий, так как пневматический сигнал хотя и обладает ограниченной скоростью распространения и имеет предельные расстояния в его передаче, но ОК и ТХК с пневмоприводом, наоборот, наделены лучшими характеристиками (в смысле быстродействия) и обладают однонаправленностью действия (либо полностью закрыт, либо открыт) в отсутствие управляющего сигнала.
12. При импульсной дозировке оперирование непрерывными величинами заменяется на дискретные, что предопределяет лучшую эффективность реализации процесса. Точность дискретных дозаторов, как правило, выше дозаторов непрерывного действия. С применением более совершенной частотно-импульсной системы дозирования компонентов упрощается автоматизация процесса и улучшаются технико-экономические показатели его проведения. Импульсная подача жидкого дозируемого компонента позволяет повысить гидростатический напор за счет наличия давления сжатого воздуха в расходной емкости, что приведет к повышению скорости потока и увеличению мгновенного расхода жидкого компонента, поступающего в реактор. При этом осуществляется дополнительная турбулизация РМ и обеспечивается более глубокое проникновение выдаваемой дозы в ее объем, а также происходит принудительное разрушение образовавшихся наростов на выходе подающего патрубка в реактор.
13. Непрерывное объемное дозирование сыпучего компонента с высокой точностью затруднено из-за возможного образования устойчивых сводов в выпускном отверстии бункера, что приводит к неравномерному поступлению сыпучего компонента на шнековый питатель. Установка вибрационного побудителя расхода на бункере сыпучего компонента, функционирующего со сканирующими амплитудой (в области малых значений) и частотой (в области высоких значений), обеспечивает, несмотря на переменную массу сыпучего компонента в бункере, непрерывное поступление сыпучего компонента из бункера на вибрирующий и вращающийся шнек, его уплотнение до постоянной объемной массы, приводящее его дозирование к высокой точности.
Сущность изобретения поясняется следующими графическими материалами.
Фиг.1. Функциональной схемой устройства автоматического управления РПНД.
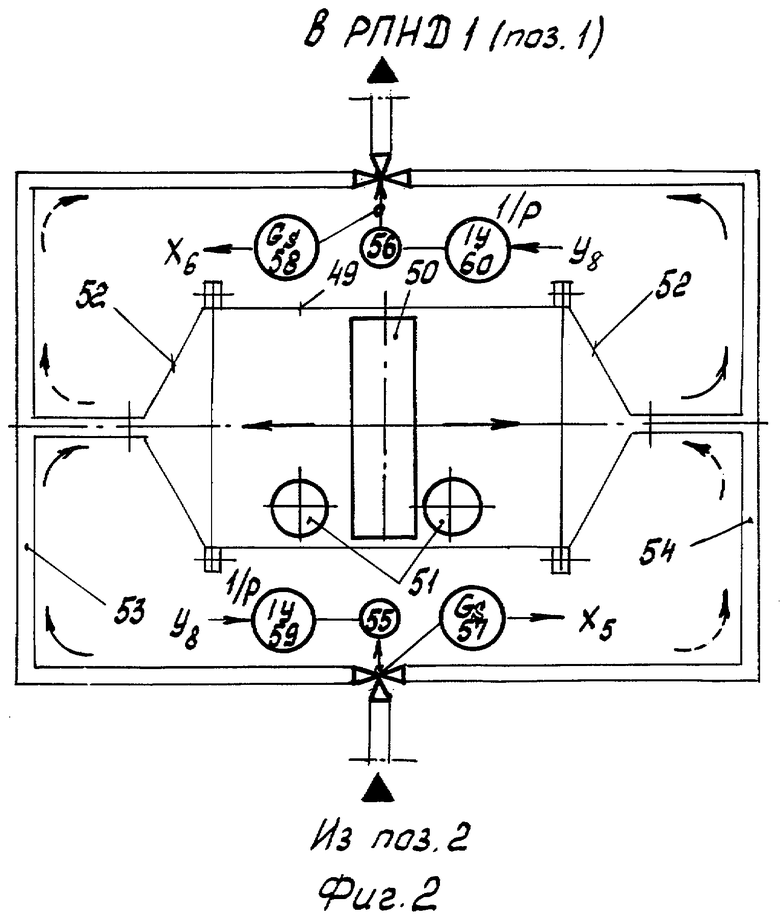
Фиг.2. Функциональной схемой управления дозатором жидкого компонента.
Фиг.3. Структурной схемой частотно-импульсной дозировки, запрограммированной в микропроцессорном контроллере.
Фиг.4. Циклограммой работы частотно-импульсной дозировки по двум компонентам.
Фиг.5. Графиком изменения основных параметров в зависимости от степени заполнения реактора (ϕ).
Установка для проведения экзотермических реакций между разнофазными исходными компонентами в РПНД включает в себя (фиг.1) собственно реактор 1, расходную емкость 2 для жидкого компонента, дозатор 3 подачи жидкого компонента и шнековый дозатор 4 подачи сыпучего компонента.
Реактор 1 (РПНД) содержит рубашку 5, тихоходную якорную и две быстроходные пропеллерные 7 и 8 мешалки, каждая из которых снабжена электродвигателями 9, 10 и 11, соответственно, редуктор 12 - привода якорной мешалки, а также клапан разгрузки реактора 13, установленный в днище реактора.
РПНД 1 снабжен патрубками: 14 - загрузки жидкого компонента, обычно буферного - для создания изначальной минимальной поверхности теплосъема и обеспечения погружения мешалки в жидкость до отметки 15, 16 - подачи дозируемого жидкого и сыпучего компонентов до отметки 17, 18 - отвода газообразных продуктов реакции; 19 и 20 - подачи хладагента с повышенной и отвода его с пониженной энтропией через рубашку. Через отсечной клапан 21 происходит заполнение расходной емкости дозируемым жидким компонентом до отметки 22. Заборный патрубок 23, смещенный относительно осевой линии расходной емкости, приподнятый относительно ее днища, изогнутый под прямым углом и снабженный на входе горизонтального участка косым срезом в сторону днища, препятствует попаданию загрязненных примесей, присутствующих в жидком компоненте или оказавшихся в расходной емкости, непосредственно под шток клапанов или под опорную поверхность запирающих шаровых клапанов дозатора, что исключает преждевременный выход дозатора из строя. В этом случае загрязненная примесь оседает на днище расходной емкости и по окончании дозировки периодически удаляется через сливной ОК 24, направляясь на дополнительную очистку для повторного использования.
Для регулируемой подачи сжатого воздуха в воздушную полость расходной емкости 2 и его стравливания из нее предназначен трехходовый регулирующий клапан 25. Вход клапана, связанный с линией подачи сжатого воздуха, снабжен дросселирующим вентилем 26, а выход клапана, обеспечивающий стравливание сжатого воздуха в атмосферу, дросселирующим вентилем 27.
Установка дросселирующих вентилей и соответствующая степень их открытия исключает режимы как "короткого замыкания", когда поток сжатого воздуха напрямую соединен с атмосферой, так и "обрыва", когда поток сжатого воздуха полностью перекрыт. Это также обеспечивает более плавное и с меньшим диапазоном колебание давления в воздушной полости, а следовательно, и более устойчивый режим работы дозатора.
Через ОК 28 расходная емкость 2 соединена с дозатором 3.
Дозатор 4 сыпучего компонента состоит из шнекового питателя 29, бункера 30, загрузочного патрубка 31, через который происходит загрузка бункера сыпучим компонентом до конечного уровня 32, редуктора 33 с двигателем 34.
На установке контролируют параметры с передачей информационных сигналов по соответствующим каналам X1-X7 на микропроцессорный контроллер (МПК) 35 с регистрацией полученных данных в запоминающем устройстве с последующим выводом по запросу на дисплей, а при необходимости и на принтер.
В реакторе 1 измеряют:
- температуру РМ посредством датчика температуры 36;
- электропроводность РМ при помощи высокочастотного датчика кондуктометра 37.
В расходной емкости 2 измеряют:
- давление сжатого воздуха в воздушной полости при помощи датчика давления 38;
- уровень дозируемого жидкого компонента посредством уровнемера 39.
В шнековом дозаторе 4 контролируют:
- вес дозируемого сыпучего компонента в бункере 30 посредством тензометрического датчика 40.
На установке регулируют:
- давление сжатого воздуха в воздушной полости расходной емкости 2 в режиме программного изменения в функции от текущего значения электропроводности РМ с выработкой управляющего сигнала с МПК 35 по корректирующему сигналу с датчика кондуктометра 37 по информационному каналу Х2 и по сигналу с датчика давления 38 по информационному каналу Х3 с последующим воздействием по каналу У1 через электропневматический аналоговый преобразователь (ЭАП) 41 на пневмопривод ТХК 25 подачи сжатого воздуха через входной дросселирующий вентиль 26 и стравливания сжатого воздуха через выходной дросселирующий вентиль 27.
На установке управляют:
- вращением тихоходной якорной 6 и двух быстроходных пропеллерных 7 и 8 мешалок по команде с МПК 35 с воздействием по управляющим каналам Z1, Z2, Z3 через блок магнитных пускателей 42 по каналам У2, У3 и У4 на электродвигатели соответствующих мешалок;
- заполнением расходной емкости 2 жидким компонентом до отметки 22 по сигналу с уровнемера 39 по каналу Х4 с выработкой управляющего сигнала в МПК 35 и воздействием по каналу У5 через электропневматический дискретный преобразователь (ЭДП) 43 на пневмопривод ОК 21;
- подачей жидкого компонента из расходной емкости 2 к дозатору 3 воздействием по команде с МПК 35 по каналу У6 через ЭДП 44 на пневмопривод ОК 28;
- сливом загрязненного остатка из расходной емкости 2 по окончании дозировки воздействием по команде с МПК 35 по управляющему каналу У7 через ЭДП 45 на пневмопривод ОК 24;
- подачей жидкого компонента в РПНД 1 из дозатора 3 по патрубку 16 по команде с МПК 35 воздействием по управляющему каналу У8 в импульсном режиме;
- первоначальной подачей сыпучего компонента к шнековому питателю 29 из бункера 30 воздействием по управляющему каналу Z5 через статический преобразователь частоты 46 по каналу У9 на вибрационный побудитель расхода 47 с последующей подачей сыпучего компонента в реактор 1 с воздействием по управляющему каналу Z4 через блок магнитных пускателей 42 по каналу У10 на электродвигатель 34 шнекового дозатора 4;
- разгрузкой реактора 1 по команде с МПК 35 с выработкой управляющего воздействия по каналу У11 через ЭДП 48 на пневмопривод клапана разгрузки 13.
Дозатор жидкого компонента 3 (фиг.2) относится к частотно-импульсным системам напорного истечения и состоит из исполнительного устройства с перепускным цилиндром 49, содержащим плавающий поршень 50 и два запирающих шариковых клапана 51, расположенных по обе стороны плавающего поршня. Торцевые части 52 перепускного цилиндра для удобства запирания и тем самым обеспечения полной герметичности выполнены коническими и соединены с осевыми патрубками для заполнения и вытеснения единичных доз.
Дозатор является исполнительным устройством двухстороннего действия, что предопределяет более высокую его производительность, и снабжен левым 53 и правым 54 трехпатрубковыми коллекторами, которые соединены между собой через входной 55 и выходной 56 ТХК, работающими в противофазе по одному общему управляющему воздействию У8. Каждый ТХК снабжен концевыми выключателями 57 и 58, фиксирующими одно из крайних положений штоков клапанов. Входной патрубок входного ТХК 55 соединен через ОК 28 с заборным патрубком 23 расходной емкости 2, а выходной выходного ТХК 56 связан через подающий патрубок 16 непосредственно с РПНД 1.
Структурная схема частотно-импульсной дозировки, реализованная в МПК 35 и представленная на фиг.3, состоит из двух концевых выключателей 57 и 58, установленных на боковых стойках входного 55 и выходного 56 ТХК. Она включает в себя программный регулятор давления 61 в воздушной полости расходной емкости 2, где переменным задающим воздействием является электропроводность РМ, измеряемая высокочастотным датчиком кондуктометра 37 в РПНД 1. Кроме того, она содержит управляемый генератор импульсов 62 переменной частоты, сигнал с которого поступает на интегратор 63, определяющий длительность выдачи дозы жидкого компонента, запускаемый сигналом Пв от микропроцессорного контроллера 35, и останавливающий процесс дозировки обоих компонентов по сигналу Х4 от датчика уровня 39 в расходной емкости после ее опорожнения до отметки расположения заборного патрубка. Интегратор 64, запускаемый конечными выключателями 57 и 58, определяет время работы шнекового питателя и вибрационного побудителя расхода. Выход интегратора 63 направлен к блоку "ЗАПРЕТ" 65, предотвращающему выдачу управляющего воздействия в случае аварийного повышения температуры РМ по каналу X1. Выход интегратора 64 соединен с блоком "ЗАДЕРЖКА" 66. Выходы с регулятора давления 61 соединены с усилителем мощности 67, а блоки "ЗАПРЕТ" 65 и "ЗАДЕРЖКА" 66 соединены соответственно с аналоговым усилителем мощности 68 и дискретными усилителями мощности 69, управляющим подачей сыпучего компонента, и 70, включающим вибрационный побудитель расхода.
На фиг.4 представлена циклограмма частотно-импульсного режима работы дозаторов подачи жидкого и сыпучего компонентов, где по оси абсцисс обозначено:
Tc - длительность подачи весовой порции сыпучего компонента;
Тжп - длительность подачи единичной дозы жидкого компонента при прямом (вправо) перемещении поршня;
Тжо - длительность подачи единичной дозы жидкого компонента при обратном (влево) перемещении поршня;
Тз - задержка начала подачи сыпучего компонента;
Тпн, Тпк - длительность остановочного режима жидкостного дозатора в начале и в конце дозировки;
Тцн, Тцк - полный цикл работы дозаторов подачи единичной дозы жидкого и весовой порции сыпучего компонентов в начале и в конце дозировки.
По оси ординат на циклограмме обозначены мгновенные и усредненные значения расходов:
Qж - объемный расход, выдаваемый дозатором жидкого компонента.
Qc - весовой расход, выдаваемого дозатором сыпучего компонента.
Vж=Qж·Тжп=Qж·Тжо - объем единичной дозы, выдаваемой дозатором жидкого компонента.
Gc=Qc·Тс - весовая порция, выдаваемая дозатором сыпучего компонента.
Qжн, Qжк - усредненный расход жидкого компонента в начале и в конце дозировки, соответственно.
Qсн, Qск - усредненный расход сыпучего компонента в начале и в конце дозировки, соответственно.
Из анализа представленной циклограммы следует, что подача сыпучего компонента происходит уже после начала подачи жидкого компонента, т.е. он попадает в среду наличия жидкого компонента в реакторе, что, в конечном итоге, обуславливает лучшие условия массообмена и ускоряет протекание процесса. Такой режим сочетания подачи единичных доз жидкого и сыпучего компонентов удается достичь установкой концевых выключателей на боковых стойках входного и выходного ТХК жидкостного дозатора.
На фиг.5 изображен график изменения основных параметров в зависимости от степени заполнения реактора (ϕ):
- уровня дозируемой жидкости в расходной емкости (Нр);
- веса сыпучего компонента в бункере (Gб);
- поверхности теплообмена со стороны рубашки (Fп);
- электропроводности РМ по показаниям высокочастотного кондуктометра (χ+ε).
Из анализа графика следует, что все основные параметры процесса претерпевают существенные изменения в ходе протекания реакций, что вызывает определенные трудности в разработке рационального устройства по безаварийному управлению объектами подобного класса.
Блок частотно-импульсной дозировки работает следующим образом:
При подаче сжатого воздуха (фиг.1) через дроссельный вентиль 26 вход ТХК 25 в воздушную полость расходной емкости 2 и открытии ОК 28 воздействием по команде с МПК 35 по каналу У6 через ЭДП 44 на его пневмопривод поршень дозатора (фиг.2) начнет перемещаться в сторону, определяемую положением штоков входного 55 и выходного ТХК, (например, вправо: сплошными стрелками показаны направление потока жидкости при вытеснении единичной дозы из правой части перепускного цилиндра и подаче ее в реактор 1 с одновременным заполнением его левой части жидкостью из расходной емкости 2). Как только срабатывает концевой выключатель 57, запускается интегратор импульсов 64 на подачу управляющего воздействия через усилители 69 и 70 на включение по каналу Z5 статического преобразователя 46 по каналу У9 вибрационного побудителя расхода 47, а по каналу Z7 через блок магнитных пускателей 42 по каналу У10 двигателя 34 шнекового дозатора 4 происходит подача сыпучего компонента. По истечении определенного времени, равного периоду Тс, с интегратора импульсов 64 поступает команда на отключение вибрационного побудителя расхода 47 и остановку двигателя 34 шнекового дозатора 4. В это время поршень дозатора продолжает перемещаться в прежнем направлении. Как только он достигнет крайнего правого положения (шарик 51 - справа от поршня, закроет выход жидкости из цилиндра), с МПК 35 поступит команда на сброс управляющего воздействия по каналу У8: происходит переключение ТХК и поршень дозатора начинает перемещаться в противоположную сторону (например, влево); цикл работы дозатора повторяется (пунктирными стрелками показаны направления потока жидкости при вытеснении единичной зоны из левой части перепускного цилиндра с подачей в реактор 1 с одновременным заполнением правой его части жидкостью из расходной емкости 2).
Частота выдачи командного сигнала У8 на переключение ТХК 55 и 56 (фиг.2) определяется давлением сжатого воздуха в расходной емкости, а задающим воздействием регулятору давления воздуха 61 является значение сигнала Х2, вырабатываемого датчиком высокочастотного кондуктометра 37, фиксирующим изменение концентрации целевого продукта в реакторе, а косвенным и степень его заполнения (фиг.5).
Использование предложенного устройства при синтезе высокоэнергетических продуктов, лекарственных препаратов, витаминов, красок и лаков позволит на 5-10% увеличить "надежностные" показатели устройства и на 4% поднять выход целевого продукта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2002 |
|
RU2239223C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2299094C2 |
| Устройство автоматического управления экзотермическим процессом в реакторе полунепрерывного действия | 1989 |
|
SU1690840A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294556C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРИГОТОВЛЕНИЯ РАСТВОРОВ В РЕАКТОРАХ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2071961C1 |
| Автоматизированная установка непрерывного действия для процесса нейтрализации | 1990 |
|
SU1794256A3 |
| Устройство для автоматического управления процессом нитрования | 1988 |
|
SU1606178A1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ПЕРЕРАБОТКИ ПОПУТНОГО НЕФТЯНОГО ГАЗА В КОНВЕРСИОННЫЙ ГАЗ УЛУЧШЕННОГО СОСТАВА | 2009 |
|
RU2465525C2 |
| Устройство для управления реактором полунепрерывного действия | 1984 |
|
SU1230667A1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1672420A1 |



Изобретение относится к области управления реактором полунепрерывного действия (РПНД) при одновременной дозировке двух компонентов и касается, в частности, регулируемой подачи разнофазных компонентов в импульсном режиме по параметрической программе в функции от текущего значения обобщенного параметра с учетом электропроводности и диэлектрической проницаемости. Устройство автоматического управления РПНД содержит расходную емкость для жидкого компонента, бункер с сыпучим компонентом, снабженный шнековым питателем и вибрационным побудителем расхода со сканирующей частотой и амплитудой, управляемым статическим преобразователем в реакторе, снабженном якорной и двумя пропеллерными мешалками, датчики уровня и давления в расходной емкости, тензометрический датчик веса бункера с сыпучим компонентом, отсечные клапаны подачи жидкого компонента в реактор, электропневматические преобразователи (ЭПП), предназначенные для управления пневмоприводами клапанов, микропроцессорный контроллер, предназначенный для программной реализации функций частотно-импульсной дозировки и регулятора давления в расходной емкости, для формирования управляющих воздействий, подаваемых на ЭПП и через соответствующие магнитные пускатели четырехканального блока на электродвигатели мешалок реактора, шнекового питателя, а через статический преобразователь частоты и амплитуды на вибрационный побудитель расхода. Расходная емкость снабжена нижним сливным патрубком и верхним трехходовым регулирующим клапаном. Нижний сливной патрубок смещен относительно оси расходной емкости, поднят косым срезом входного участка относительно днища расходной емкости и через соответствующий отсечной клапан, управляемый статическим преобразователем, связан с входом дозатора. Последний выполнен в виде перепускного цилиндра с плавающим поршнем и коническими торцевыми частями с запирающими шаровыми клапанами и снабжен трехпатрубковыми левым и правым коллекторами, центральные патрубки которых соединены с осевыми отверстиями конических торцевых частей перепускного цилиндра, нижние патрубки - с выходными отверстиями входного трехходового клапана (ТХК), а верхние патрубки связаны с входными отверстиями выходного ТХК. Вход входного ТХК соединен последовательно через соответствующий отсечной клапан с нижним сливным патрубком расходной емкости, а выход выходного ТХК связан с первым патрубком, а выход шнекового питателя соединен со вторым патрубком реактора, при этом выходы датчиков температуры уровня, давления и тензометрического датчика веса соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессорного контроллера. Согласно изобретению устройство содержит высокочастотный датчик электропроводности реакционной массы, два концевых выключателя, установленные на корпусах входного и выходного ТХК дозатора, причем выход с датчика электропроводности соединен с пятым входом, выход с концевого выключателя входного ТХК клапана дозатора связан с шестым входом, а выход с концевого выключателя выходного ТХК дозатора направлен к седьмому входу микропроцессорного контроллера, при этом выход от высокочастотного датчика электропроводности связан со входами на изменение задания регулятору давления и генератору импульсов. 5 ил.
Устройство автоматического управления реактором полунепрерывного действия, содержащее расходную емкость для жидкого компонента, бункер с сыпучим компонентом, снабженный шнековым питателем и вибрационным побудителем расхода со сканирующей частотой и амплитудой, управляемым статическим преобразователем частоты и амплитуды, датчик температуры в реакторе, снабженном якорной и двумя пропеллерными мешалками, датчики уровня и давления в расходной емкости, тензометрический датчик веса бункера с сыпучим компонентом, отсечные клапаны подачи жидкого компонента в реактор, электропневматические преобразователи, предназначенные для управления пневмоприводами клапанов, микропроцессорный контроллер, предназначенный для программной реализации функций частотно-импульсной дозировки, а также для формирования управляющих воздействий, подаваемых на электропневматические преобразователи, а через соответствующие магнитные пускатели четырехканального блока на электродвигатели мешалок реактора, шнекового питателя, а через статический преобразователь частоты и амплитуды на вибрационный побудитель расхода, при этом расходная емкость снабжена нижним сливным патрубком и верхним трехходовым регулирующим клапаном, вход которого через соответствующий дроссельный вентиль соединен с линией подачи сжатого воздуха, а выходы связаны соответственно с воздушной полостью расходной емкости и через соответствующий дроссельный вентиль с атмосферой, причем нижний сливной патрубок смещен относительно оси расходной емкости, поднят косым срезом входного участка относительно днища расходной емкости и через соответствующий отсечной клапан связан с входом дозатора, выполненного в виде перепускного цилиндра с плавающим поршнем и коническими торцевыми частями с запирающими шаровыми клапанами, снабженного трехпатрубковыми левым и правым коллекторами, центральные патрубки которых соединены с осевыми отверстиями конических торцевых частей перепускного цилиндра, нижние патрубки - с выходными отверстиями входного трехходового клапана и верхние патрубки связаны с входными отверстиями выходного трехходового клапана, причем вход входного трехходового клапана соединен последовательно через соответствующий отсечной клапан с нижним сливным патрубком расходной емкости, а выход выходного трехходового клапана связан с первым патрубком, а выход шнекового питателя соединен со вторым патрубком реактора, при этом выходы датчиков температуры, уровня, давления, веса соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессорного контроллера, отличающееся тем, что устройство дополнительно содержит высокочастотный датчик электропроводности реакционной массы, два концевых выключателя, установленных на корпусах входного и выходного трехходовых клапанов дозатора, причем выход с датчика электропроводности соединен с пятым входом, выход с концевого выключателя входного трехходового клапана дозатора связан с шестым входом, а выход с концевого выключателя выходного трехходового клапана дозатора направлен к седьмому входу микропроцессорного контроллера, при этом выход от высокочастотного датчика электропроводности связан со входами на изменение задания регулятору давления и генератору импульсов, запрограммированных в микропроцессорном контроллере.
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2002 |
|
RU2239223C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРИГОТОВЛЕНИЯ РАСТВОРОВ В РЕАКТОРАХ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2071961C1 |
| US 4589072 А, 13.05.1986 | |||
| DE 4127536 A1, 25.02.1993 | |||
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1672420A1 |

