Изобретение относится к области управления реактором полунепрерывного действия (РПНД) при изменяемом расходе жидкого дозируемого компонента с использованием трехканального статического источника питания для регулирования скорости вращения двигателя мешалки, производительности дозатора и мощности, потребляемой тепловым расходомером при определении расхода дозируемого компонента, которое найдет широкое применение в химической, химико-фармацевтической, лакокрасочной, витаминной, пищевой и других специализированных отраслях промышленности для производства промежуточных (при многостадийном синтезе) и целевых продуктов (лекарственных препаратов, пигментов, лаков, витаминов, высокоэнергетических композиций).
Известно значительное количество способов и устройств по управлению РПНД (реактором), каждый из которых находит свою область применения, исходя из особенностей кинетики и термодинамики процесса, фазового состояния дозируемого компонента, технологического и аппаратурного оформления процесса, а также достигнутого уровня научно-технического процесса:
1. А.c. №№1230667, МПК В01J 9/00, Публ. 1986, 1634659, МПК В01J 9/00, публ. 1991, 1690840, МПК B01J 19/00, публ. 1991, 1736600, МПК B01J 19/00, публ. 1992, 1804903, МПК B01J 19/00, публ. 1993.
2. Автоматическое регулирование и контрольно-измерительные приборы в промышленности основной химии / Под ред. В.С.Шермана - Л. 1975/,
- Беркман Б.Е. Промышленный синтез ароматических нитросоединений и аминов - М., 1964,
- Веденеев Ю.Д. Дозаторы непрерывного действия. - М., 1978,
- Манусов Е.Б. Контроль и регулирование технологических процессов лакокрасочных производств. - M., 1977.
Известен способ автоматического управления технологическим процессом в реакторе с приведенным устройством по его реализации, в котором частоту выдачи доз, объем единичной дозы подаваемого компонента, а также скорость вращения мешалки корректируют по уровню дозируемого компонента в расходной емкости (РЕ) (А.с. №498957, публ. 1976 г.).
Недостатки способа:
1. Усложненная трехканальная структура управления отдельными контурами не обеспечивает полную взаимосвязь между ними.
2. Отсутствие мощной турбулизации реакционной массы (РМ) при переменной степени заполнения реактора отрицательным образом сказывается на продолжительности процесса дозирования, недопустимом отклонении температуры РМ и выходе целевого продукта. При этом даже совместное воздействие указанных факторов на процесс не способствует повышению выхода целевого продукта и сокращению длительности дозировки.
Известна установка, описанная в статье "Безопасное управление процессом нитрования фурфурола в реакторе полунепрерывного действия" "Химико-фармацевтический журнал", 1993, №3, с.53-57), в которой изложены принципы работы как самой установки, так и устройства по ее управлению.
Недостатки способа:
1. Невысокая точность стабилизации температуры РМ в реакторе из-за отсутствия контроля расхода дозируемого компонента, подаваемого в реактор, что не позволяет реализовать каскадную систему стабилизации температуры РМ, отличающуюся повышенным быстродействием.
2. Безнапорный режим подачи дозируемого компонента не обеспечивает усиленной турбулизации потока в среде РМ, что снижает эффективность тепло- и массообмена.
В качестве ближайшего аналога по данному изобретению принята установка, описанная в статье "Автоматизированная система управления реактором полунепрерывного действия", опубликованная в журнале "Химическая промышленность", 1991, №10 с.48-52, в которой изложена суть как самой установки, так и устройства по ее управлению.
Установка содержит реактор с рубашкой и змеевиком, соединенных между собой параллельно через трехходовой регулирующий клапан, мешалку с регулируемым приводом, клапан разгрузки реактора, вытяжную систему для отвода газообразных продуктов реакции, две расходные РЕ, заполняемые исходными компонентами, и двухканальный дозатор с регулируемым приводом.
Устройство по управлению реактором реализовано на использовании: измерителей температуры РМ в реакторе с управляющим воздействием на пневмопривод трехходового клапана с перераспределением потоков, хладоагента в зависимости от знака отклонения температуры РМ, между рубашкой и змеевиком; измерителей уровней в расходных емкостях с регулирующим воздействием по значению одного из них в програмно-параметрическом режиме через общий статический преобразователь частоты как на производительность дозатора, так и на скорость вращения мешалки.
Недостатки приведенного устройства:
1. Пониженная мощность теплосъема, обусловленная параллельным соединением змеевика и рубашки, что ведет к увеличению длительности дозировки.
2. Отсутствие измерителей расхода дозируемых компонентов не позволяет реализовать эффективную каскадную систему регулирования, обеспечивающую стабилизацию температуры РМ в реакторе с высокой динамической точностью.
3. Использование общего статического преобразователя частоты снижает значимость применения регулируемых приводов из-за ограниченного диапазона выбора скоростей вращения мешалки и производительности дозатора, поскольку электрические характеристики статических преобразователей частоты для каждого из приводов в отдельности должны быть разными в силу специфики их назначения. Кроме того, такой статический преобразователь частоты не обеспечивает требуемую плавность и жесткость характеристики изменения скорости вращения двигателя мешалки в широком диапазоне при переменной нагрузке на ее вал.
Сущность предлагаемого изобретения состоит в том, что предложено устройство автоматического управления реактором полунепрерывного действия, содержащее расходную емкость для жидкого дозируемого компонента, реактор, снабженный мешалкой, змеевиком и рубашкой, термопреобразователь, расположенный в реакторе, датчик уровня, установленный в расходной емкости, электропневматические дискретные преобразователи, предназначенные для управления пневмоприводами отсечных и разгрузочных клапанов, статический источник питания, при этом выход с расходной емкости через дозатор соединен с патрубком реактора, отличающееся тем, что оно дополнительно снабжено статическим трехканальным источником питания, датчиками давления и расхода на напорном патрубке дозатора и электропроводности в реакторе, измерителями частоты напряжения, подаваемого к двигателям дозатора и мешалки, а также мощности, потребляемой расходомером, микропроцессорным контроллером, предназначенным для реализации функций каскадной системы стабилизации температуры реакционной массы в реакторе и программно-импульсно-реверсивной системы регулирования скорости вращения двигателя мешалки, а также формирования управляющих воздействий, подаваемых на электропневматические преобразователи и через статический трехканальный источник питания на двигатели дозатора, мешалки и расходомер, выполненный на основе теплового метода с измерением величины мощности, потребляемой электронагревателем расходомера, причем статический трехканальный источник питания снабжен общим блоком управления, двумя отдельными статическими регулируемыми преобразователями частоты и одним статическим преобразователем частоты и напряжения с регулированием величины потребляемой мощности, первый вход которого через блок управления и первый статический регулируемый преобразователь частоты и первый выход связан параллельно с первым измерителем частоты и двигателем дозатора, второй вход через блок управления и второй статический регулируемый преобразователь частоты и второй выход связан параллельно с вторым измерителем частоты и двигателем мешалки, а третий вход через статический преобразователь частоты с регулированием величины потребляемой мощности и третий выход параллельно связан с измерителем мощности и с управляющим входом теплового расходомера, расходная емкость снабжена нижним сливным патрубком с косым срезом, смещенным относительно оси расходной емкости, поднятым относительно днища расходной емкости и связанным с входом дозатора, на напорном участке которого последовательно расположены тепловой расходомер, датчик давления и обратный клапан, при этом выходы термопреобразователя, расположенного в реакторе, датчика электропроводности, измерителя частоты напряжения, подаваемого к двигателю мешалки, датчика уровня в расходной емкости, измерителя частоты напряжения, подаваемого к двигателю дозатора, термопреобразователя теплового расходомера, измерителя мощности, потребляемой тепловым расходомером, датчика давления соединены, соответственно, с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами микропроцессорного контроллера, а четвертый и пятый выходы с микропроцессорного контроллера связаны через электропневматические дискретные преобразователи с клапаном разгрузки реактора и со сливным клапаном расходной емкости, соответственно.
В порядке обоснования соответствия предлагаемого изобретения критерию «промышленная применимость» приводим следующие доказательства.
1. В настоящее время около 75% всех существующих промышленно-технологических систем органического синтеза, протекающего с большим тепловым эффектом, реализуются в РПНД в силу значительных их преимуществ (см. таблицу).
Классификационные особенности РПНД
пуско-остановочных операций
аппаратуры по окончании каждого цикла процесса
Из анализа приведенной таблицы следует, что преимущества РПНД существенно превалируют над его недостатками, а при выборе рациональной стратегии управления РПНД большинство его недостатков может быть сведено к минимуму.
2. Специфическое название РПНД обусловлено различным режимом подачи исходных компонентов, производимых перед началом процесса дозирования. Один из них сливается в реактор, а второй подается постепенно и непрерывно на стадии дозирования с целью рассредоточения выделения тепла во времени. Выгрузка прореагировавшей РМ происходит на окончании стадий дозирования и выдержки, т.е. периодически по завершении одного полного цикла процесса.
Сочетание в одном цикле процесса двух различных режимов подачи исходных компонентов и выгрузки готовой РМ предопределили такое специфическое название реактора подобного принципа действия.
3. Уровень автоматизации действующих и проектируемых РПНД остается до сих пор относительно невысоким из-за значительной сложности последнего, как объекта управления, и потенциальной опасности экзотермических процессов, проводимых в нем, а также недостаточной изученности учета воздействия указанных факторов для совершенствования систем управления объектами подобного класса.
4. Сложность РПНД обусловлена, прежде всего, нестационарностью его динамических характеристик по каналам управляющих воздействий, связанной как с переменным составом реакционной массы, так и с переменной степенью заполнения реактора.
Объем РМ в РПНД является величиной переменной и определяется следующей зависимостью:
где V - текущий объем РМ, м3;
Vн - исходный объем компонента в реакторе перед началом дозировки, м3;
Gдк - расход дозируемого компонента, кг/ч;
τ - длительность дозировки, ч.
Поверхность теплообмена также меняется во времени (по ходу дозировки) и выражается следующим соотношением:
где F - текущая поверхность теплообмена, м2;
Fн - исходная поверхность теплообмена (перед началом дозировки), м2;
D - внутренний диаметр реактора по его цилиндрической части, м.
Теплоемкость РМ в РПНД также является величиной переменной и определяется следующим выражением:

где Ан - исходная теплоемкость РМ перед началом дозировки, кДж/кг;
А - текущая теплоемкость дозируемого компонента, кДж/кг;
Сдк - удельная теплоемкость дозируемого компонента, кДж/кг град;
Gдк - расход дозируемого компонента, кг/ч.
5. Потенциальная опасность процесса состоит в том, что при случайном стечении нежелательных обстоятельств (отказы в работе системы: стабилизации температуры РМ, дозировки компонентов, вращения мешалки; возникновение протечек в теплообменпых устройствах реактора, недопустимые отклонения параметров хладоагента и, как следствие, бурное неуправляемое развитие окислительно-восстановительных реакций), громадная концентрация межатомной энергии связи, таящейся в исходных, промежуточных и, в особенности конечных, продуктах реакции, может перейти в реальную аварию с тяжелыми последствиями (большим материальным ущербом).
Поэтому разработка более рациональных схем автоматического управления объектами подобного класса на основе новейших достижений в науке и технике является одним из актуальных решений поставленной задачи.
6. Несмотря на то, что электропривод в химической промышленности является силовой основой большинства аппаратов с мешалкой, применяемых для различных производственных процессов, его технический уровень гораздо ниже, чем в других отраслях промышленности, например в металлургической. Регулируемый же электропривод, который считается одним из важнейших средств воздействия на объект при автоматизации производственных процессов, находит до сих пор крайне ограниченное применение при разработке рациональных систем управления химическими процессами, что отрицательным образом сказывается на повышении их эффективности.
Развитие силовой полупроводниковой техники позволяет внести принципиально новые решения в структуру автоматизированного электропривода дозатора и перемешивающих устройств. Статические преобразователи, разработанные на основе биполярных транзисторов с изолированным затворами, изменяющие трехфазное напряжение промышленной частоты в трехфазное напряжение регулируемой амплитуды и частоты, позволяют придать хорошие регулирующие качества асинхронному двигателю с короткозамкнутым ротором, как наиболее простому в исполнении и надежному в работе.
Использование биполярных транзисторов в статических преобразователях частоты и регуляторах мощности позволяет обеспечить большие токи в силовых цепях управления, высокую частоту переключения (до 100 кГц), малое переходное сопротивление в открытом виде, что до минимума снижает тепловые потери, а также требует незначительную мощность сигнала управления.
Изменения напряжения и частоты на статорной обмотке двигателя в замкнутой системе автоматического управления в функции определяющего параметра позволяют обеспечить требуемый диапазон регулирования скорости вращения двигателя, ограничить пусковой момент и получить плавный разгон и торможение двигателя.
В особенности эффективно использование регулируемого электропривода при автоматизации РПНД, характеризующегося переменной степенью заполнения и изменением вязкости РМ в широком диапазоне по мере подачи дозируемого компонента.
Каскадная система стабилизации температуры РМ по подаче дозируемого компонента в реактор и програмно-импульсно-реверсивный режим перемешивания создают улучшенное распределение исходных компонентов и продуктов реакции в целенаправленном протекании химической реакций из-за возникновения более тесного равномерного и плотного контакта между реагентами при их пульсирующем взаимодействии.
Это приводит к улучшению процессов суспензирования и диспергирования одного компонента в другом. При этом возрастает мощность конвективных потоков, повышая тем самым эффективность от РМ к поверхностям теплообмена (рубашки и змеевика) реактора.
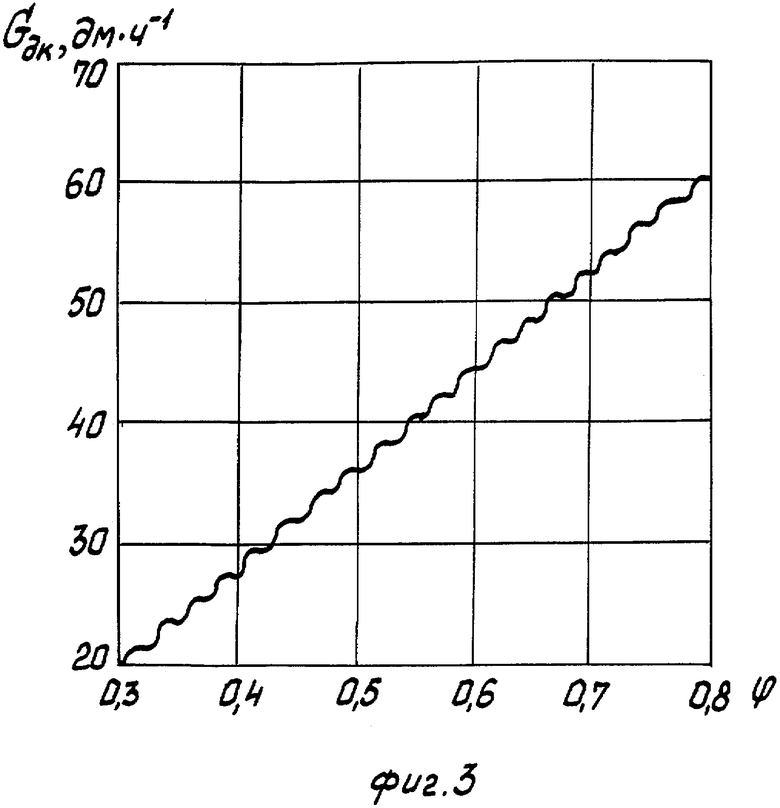
8. При подаче компонента в реактор посредством дозатора переменной производительности с регулируемым электроприводом появляется возможность постепенного и безопасного увеличения его расхода, так как по мере повышения степени заполнения реактора пропорционально возрастает и поверхность теплообмена, что увеличивает возможность дополнительного теплосъема. Повышая постепенность увеличения расхода дозируемого компонента в реактор, удается существенно сократить длительность его подачи и исключить недопустимые отклонения температуры РМ.
Поскольку переменные степени заполнения реактора и состав РМ создают неодинаковые условия интенсивности перемешивания, при постоянной скорости вращения мешалки, ухудшаются массообменные процессы. Для поддержания режима перемешивания на постоянном уровне целесообразно скорость вращения мешалки увеличивать пропорционально количеству отдозированного компонента из РЕ.
Если же устанавливать производительность дозатора и скорость вращения мешалки постоянными, исходя из конечной степени заполнения реактора, то тогда для начальной степени заполнения реактора существующая минимальная поверхность теплосъема не справится с возросшей в несколько раз тепловой нагрузкой, а режим перемешивания сместится в область аэрации. В конечном итоге совместное воздействие указанных факторов послужит причиной теплового выброса РМ или взрывного разрушения реактора.
9. Измерение расхода материальных потоков жидкостей является одним из важнейших информационных каналов при выборе рациональной структуры управления процессом в условиях воздействия переменных нагрузок на объект.
В промышленности до 50% управляющих воздействий приходится на регламентацию материальных потоков, что в конечном итоге и определяет эффективность ведения процесса по данному параметру, поэтому разработка достаточно простых в эксплуатации расходомеров, обладающих приемлемыми метрологическими характеристиками с высокими надежностными показателями, является весьма перспективной задачей.
Измерение расхода позволяет прогнозировать режим протекания процесса, определять количество поданого в реактор компонента, реализовать по упрощенному алгоритму систему стабилизации температуры РМ в реакторе.
Благоприятными факторами, способствующими успешному осуществлению контроля расхода тепловым методом, является бесконтактность и отличные демпфирующие свойства самой измерительной системы, что существенным образом улучшает надежностные характеристики датчика - теплового расходомера.
Принцип действия теплового расходомера, наиболее часто применяемого при автоматизации РПНД, основан на измерении мощности, потребляемой электронагревателем движущегося потока дозируемого компонента в трубопроводе при поддержании постоянства температурного перепада до (T1) и после (Т2) электронагревателя. В этом случае расход дозируемого компонента Gдк будет являться функцией мощности N, потребляемой электронагревателем: Gдк=f(N) при Т2-T1=const, и с повышением расхода мощность, потребляемая электронагревателем, возрастает пропорционально расходу Gдк.
Конструктивно тепловой расходомер представляет собой отрезок трубы с наружным кольцевым расположением трех обмоток по ее поверхности: двух термобатарей, соединенных между собой по дифференциальной схеме измерения сигнала, и одной электронагревателя, размещенной на разном растоянии между ними.
Отличительной особенностью тепловых расходомеров является отсутствие дополнительных потерь давления на участке измерения.
Ценным качеством таких расходомеров является также возможность измерения расхода агрессивных, абразивных и вязких жидкостей и пульп, поскольку степень агрессивности контролируемой среды определяется только материалом трубы, которую можно подобрать коррозионно-стойкой.
10. РПНД, как объект управления по каналу регулирования температуры РМ, когда в качестве управляющего воздействия используется подача дозируемого компонента, обладает существенной инерционностью, что влияет на точность ее динамической стабилизации. В этом случае целесообразно применять каскадную систему стабилизации температуры РМ. Она включает в себя два регулятора: основной или внешний для стабилизации основного параметра - температуры РМ и вспомогательный или внутренний, предназначенный для регулирования вспомогательной координаты объекта управления - расхода дозируемого компонента.
Вследствие более высокого быстродействия внутреннего контура по регулированию расхода дозируемого компонента в каскадной системе по стабилизации температуры РМ повышается качество переходного процесса: уменьшается величина амплитудного отклонения по температуре и в несколько раз сокращается длительность переходного процесса. Благодаря высокому быстродействию вспомогательного контура по регулированию расхода дозируемого компонента предотвращаются значительные отклонения основной регулируемой величины - температуры РМ в режиме стабилизации, а сама структура регулятора температуры существенно упрощается.
11. Большинство процессов, реализуемых в РПНД, протекают с заметным изменением электропроводности РМ в ходе реакции, которая в сравнении с первоначальным значением (перед началом дозировки) может возрастать в 5-6 раз. Кроме того, электропроводность позволяет контролировать и аварийные режимы протекания процесса: нарушение температурного дозировочного и гидродинамического режимов.
Особенности данного изобретения и оценка его эффективности поясняются следующими графическими материалами:
Фиг 1 - функциональная схема автоматического управления РПНД.
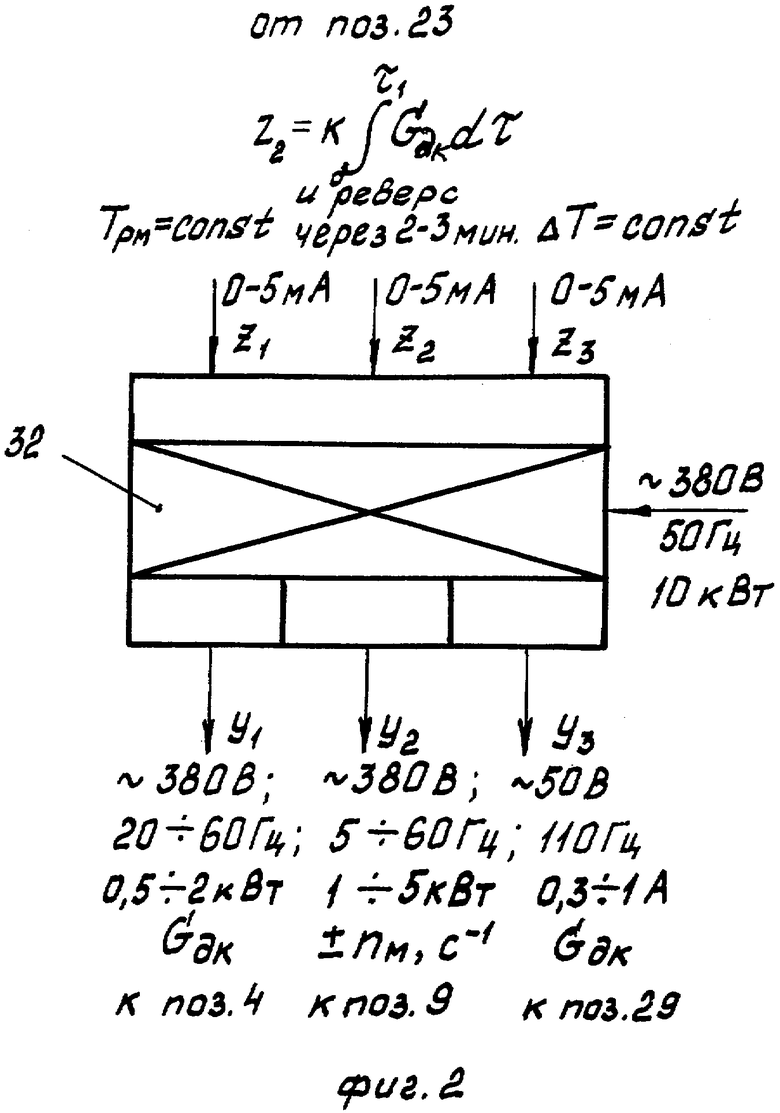
Фиг.2 - блок статического трехканального регулируемого источника питания.
Фиг.3 - график изменения расхода дозируемого компонента (Gдк) в зависимости от степени заполнения РПНД (ϕ).
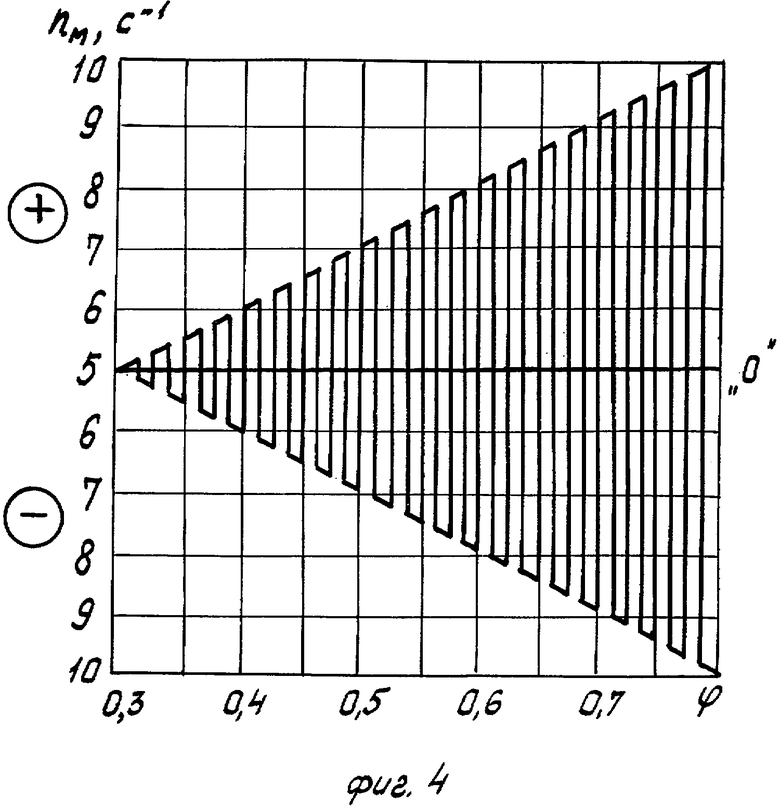
Фиг.4 - график изменения скорости (nм) и направления (±) вращения мешалки в зависимости от степени заполнения РПНД (ϕ).
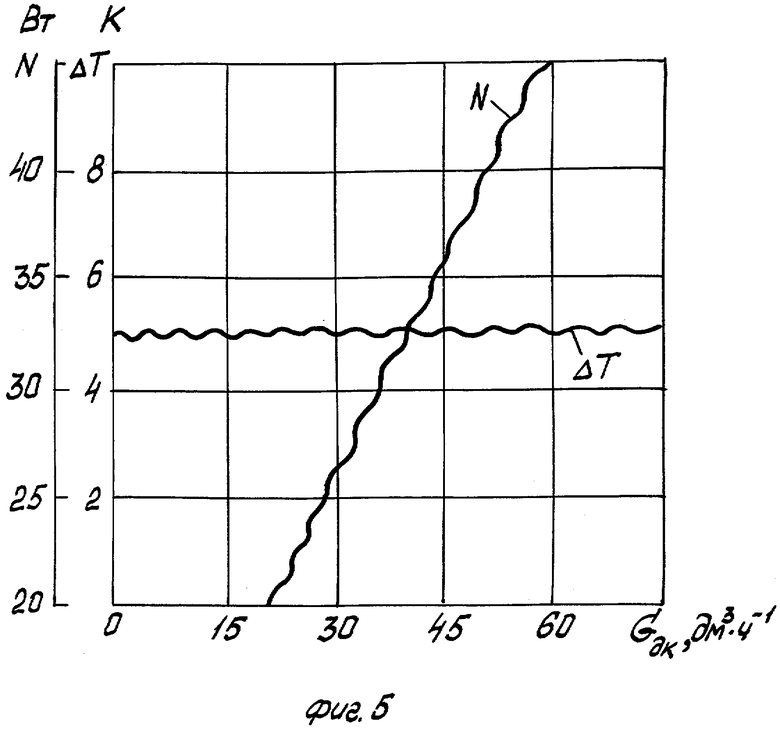
Фиг.5 - график изменения мощности (N), потребляемой электронагревателем теплового расходомера в зависимости от расхода дозируемого компонента (Gдк) при обеспечении постоянства температурного перепада (ΔT) между термобатареями, установленными до и после электронагревателя.
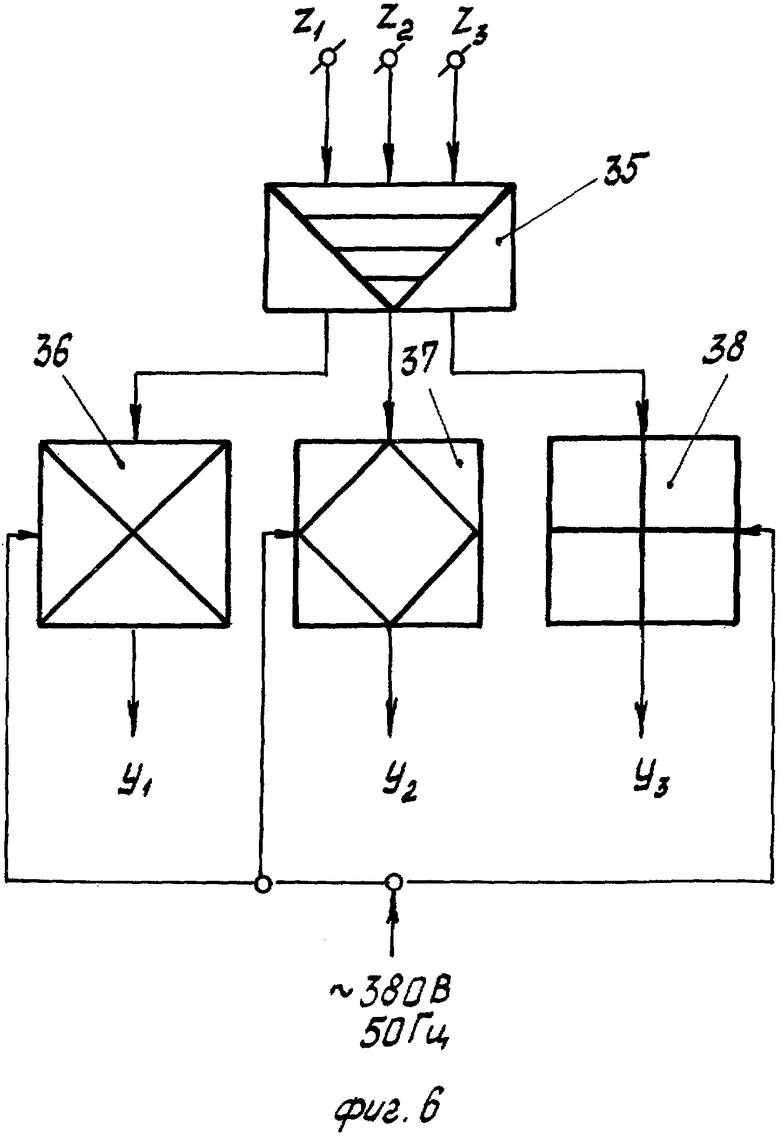
Фиг.6 - структурная схема статического трехканального регулируемого источника питания.
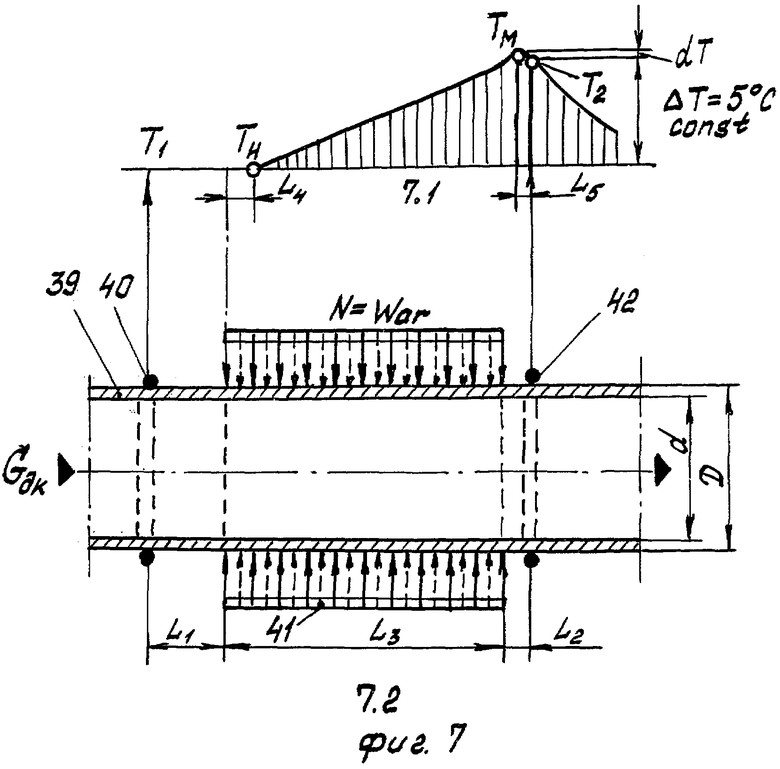
Фиг.7 - принципиальная схема датчика - теплового расходомера.
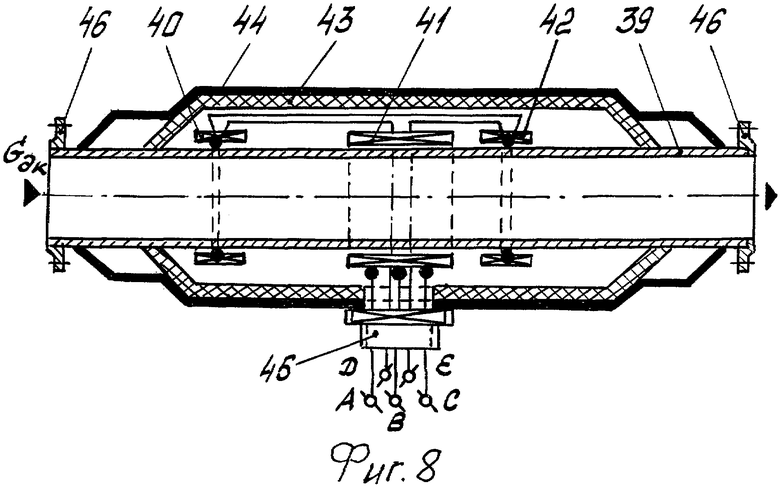
Фиг.8 - конструктивная схема датчика теплового расходомера.
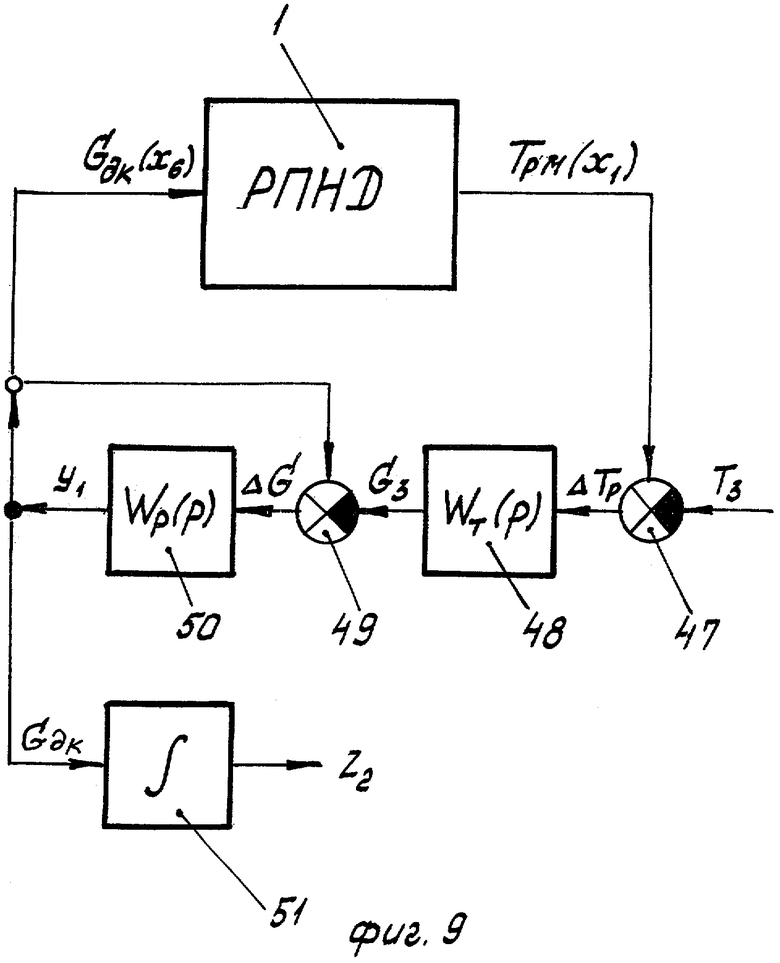
Фиг.9 - структурная схема каскадной системы стабилизации температуры РМ.
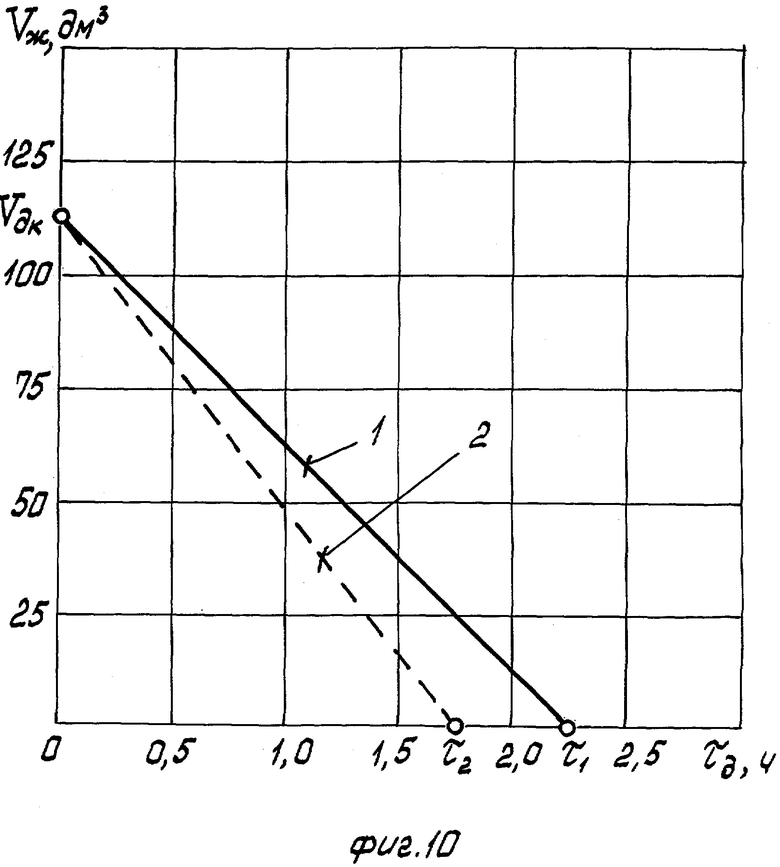
Фиг.10 - график оценки длительности подачи дозируемого компонента объемом Vдк до (τ1) и после (τ2) используемого изобретения.
На фиг.1 представлена функциональная схема устройства по автоматическому управлению РПНД на установке, состоящей из реактора 1, РЕ 2 и дозатора 3 подачи дозируемого компонента с двигателем 4.
Реактор 1 в качестве теплообменных устройств снабжен рубашкой 5 и змеевиком 6, соединенными между собой последовательно посредством трубной перемычки 7. Реактор 1 оснащен пропеллерной мешалкой 8 с двигателем 9, клапаном 10 разгрузки (аварийного сброса) содержимого реактора; патрубками подачи: хладоагента 11 и исходного компонента 12; патрубками выхода: хладоагента с пониженной энтропией 14 и газообразных побочных продуктов реакции 15.
По окончании дозировки объем РМ повышается до уровня 16; РЕ 2 оснащена патрубком 17 для заполнения дозируемым компонентом до уровня 18, сливным клапаном 19 для удаления загрязненного остатка после окончания дозировки, заборным патрубком 20 дозатора, приподнятого относительно днища с косым входным срезом в его сторону, препятствующим попаданию посторонних включений сверху в заборный патрубок.
На напорном патрубке 21 дозатора, опущенного в реактор, в зону работы мешалки, установлен обратный клапан 22, представляющий собой односедельный отсечной клапан прямого принципа действия (нормально закрыт) и препятствующий образованию опасного сифонно-самостоятельного потока РМ из реактора, который возможен был бы в случае аварийного останова дозатора, когда уровень РМ в реакторе станет выше уровня дозируемого компонента в РЕ или давление газовой фазы в реакторе станет избыточным по отношению к РЕ.
Для регистрации контролируемых параметров, хранения в памяти их значений и выдачи соответствующих управляющих воздействий предназначен МПК 23 с малой степенью интеграции с поступлением информационных сигналов по каналам Xi и выдачей управляющих воздействий по каналам Yi.
В реакторе 1 контролируют:
- температуру РМ посредством термопреобразователя 24 с выдачей информационного сигнала по каналу X1;
- электропроводность РМ с помощью погружного кондуктометра 25 с выдачей информационного сигнала по каналу Х2;
- скорость и направление вращения двигателя мешалки при помощи частотомера 26 с выдачей информационного сигнала по каналу Х3.
В РЕ 2 контролируют:
- уровень дозируемого компонента посредством уровнемера 27 с выдачей информационного сигнала по каналу Х4.
На дозаторе и его напорном патрубке контролируют:
- скорость вращения двигателя дозатора при помощи частотомера 28 с выдачей информационного сигнала по каналу Х5;
- температурный перепад на тепловом расходомере 29 посредством дифференциальной термобатареи с выдачей информационного сигнала по каналу Х6;
- мощность, потребляемую электронагревателем теплового расходомера 29 при помощи измерителя мощности 30 с выдачей сигнала по каналу Х7;
- давление посредством манометра 31 с выдачей информационного сигнала по каналу Х8.
В реакторе 1 регулируют:
- температуру РМ в режиме стабилизации по каскадной схеме по сигналу с термопреобразователя 24 по информационному каналу X1 с выдачей с МПК 23 командного сигнала по каналу Z1 на статический трехканальный источник питания 32 с последующим воздействием по каналу Y1 на скорость вращения двигателя 4 дозатора 3;
- скорость вращения двигателя 9 мешалки в программно-импульсно-реверсивном режиме, когда текущее значение скорости определяется интегралом расхода дозируемого компонента, а реверсивное - задается постоянным временным интервалом по сигналу с измерителя мощности 30, потребляемой электронагревателем теплового расходомера 29, по каналу Х7 с выдачей с МПК 23 командного сигнала по каналу Z2 на статический трехканальный источник питания 32 с последующим воздействием по каналу Y2 на скорость и направление вращения двигателя 9.
На напорном патрубке 21 регулируют температурный перепад теплового расходомера 29 в режиме стабилизации по информационному сигналу Х6 с выдачей с МПК 23 командного сигнала по каналу Z3 на статический трехканальный источник питания 32 с последующим воздействием по каналу Y3 на мощность, подводимую к электронагревателям теплового расходомера, являющуюся показателем текущего значения расхода дозируемого компонента.
На установке управляют:
- аварийным сбросом РМ из реактора 1 воздействием по сигналам с термопреобразователя 24 по каналу X1 и с кондуктометра 25 по каналу Х2 через МПК 23 по каналу Y4 через электропневматический дискретный преобразователь 33 на пневмопривод клапана разгрузки 10;
- разгрузкой РЕ 2 от загрязненного остатка дозируемого компонента воздействием по сигналу Х4 от уровнемера 27 через МПК 23 по каналу Y5 на электропневматический дискретный преобразователь, а затем через преобразователь 34 на пневмопривод сливного клапана 19.
На фиг.2 представлен блок статического трехканального преобразователя частоты, напряжения и мощности, выполненного на основе биполярных транзисторов с изолированным затвором с высокочастотными импульсными преобразователями (поз.32), уменьшающими его габариты и вес.
Первый канал (Z1-Y1) предназначен для стабилизации температуры РМ в системе каскадного регулирования с управляющим воздействием на изменение производительности дозатора 3 путем варьирования частоты подаваемого напряжения к двигателю 4 дозатора (фиг.1).
Второй канал (Z2-Y2) служит для управления скоростью вращения двигателем 9 мешалки 8 в функции от степени заполнения РПНД, определяемой по интегралу отдозированного компонента в программно-импульсно-реверсивном режиме (фиг.4).
Длительность импульса определяется временным интервалом и устанавливается по таймеру блока управления с учетом динамической характеристики используемого асинхронного двигателя и объема реактора.
Третий канал (Z3-Y3) служит для стабилизации температурного перепада на тепловом расходомере до и после электронагревателя варьированием мощности электронагревателя в зависимости от расхода дозируемого компонента (фиг.5).
На фиг.6 представлена структурная схема статического трехканального источника питания для регулирования частоты и мощности.
Конструктивно последний состоит из блока управления 35, первого преобразователя частоты 36 для изменения скорости вращения двигателя 4 дозатора 3 в зависимости от знака отклонения температуры РМ.
Второй преобразователь частоты 37 предназначен для управления скоростью вращения мешалки в программно-импульсно-реверсивном режиме в функции от количества отдозированного компонента в реактор и временного интервала.
Третий преобразователь частоты и мощности (N) 38 служит для управления мощностью (N) электронагревателя теплового расходомера при измененной, но фиксированной частоте, и с пониженным значением напряжения, что исключает погрешность от дополнительных колебаний питающего напряжения и снижает требования к величине пробоя изоляционного материала, реализуя электронагреватель весьма компактным.
На фиг.7 представлена принципиальная схема работы теплового расходомера (датчика) измерения мощности, потребляемой электронагревателем, при обеспечении постоянства разности температур на поверхности трубы (фиг.7.1), по которой проходит поток дозируемого компонента Gдк, до и после электронагревателя, и ассиметричности расположения обеих термобатарей относительно электронагревателя, что исключает дополнительную погрешность от влияния термопотока электронагревателя на показания дифференциальной термобатареи.
На фиг.7.1 показана динамика поверхностного кольцевого температурного поля вдоль наружной стенки трубы по ходу потока дозируемого компонента до электронагревателя, под электронагревателем и после него.
К основным элементам теплового расходомера (фиг.7.2) относятся: отрезок трубы 39, по наружной поверхности которой последовательно расположены три кольцевые обмотки на разном расстоянии друг от друга (условия ассиметричности): термобатарея 40 (входная) до электронагревателя 41 и термобатарея 42 (выходная) после электронагревателя.
Стрелками (сплошные, чередующиеся с пунктирными к стенке трубы) показано направление воздействия термопотока от электронагревателя через стенку трубы к потоку дозируемого компонента (Gдк), проходящего внутри трубы 39.
Буквенными символами обозначены параметры:
- температурные:
Т1 - температура поверхности трубы датчика до электронагревателя, определяемая температурой дозируемой жидкости;
Т2 - температура поверхности трубы датчика после электронагревателя, определяемая мощностью электронагревателя (N), необходимой для обеспечения постоянства температурного перепада (ΔТ=5С) между входной и выходной термобатареями;
Тн - начальный подъем температуры поверхности трубы от воздействия электронагревателя, при этом: Тн≈Т1;
Тм - максимальный подъем температуры поверхности трубы на окончании воздействия электронагревателя, при этом Тм>Т2;
ΔT - постоянная разность температур выходной и входной термобатарей вне зависимости от величины расхода дозируемого компонента;
dT - минимальная разность температур по наружной поверхности трубы между максимальным фактическим ее достижением и показаниями выходной термобатареи, при этом dT≪Т;
- линейные:
L1 - расстояние от входной термобатареи до начала обмотки электронагревателя;
L2 - расстояние от конца обмоток электронагревателя до выходной термобатареи;
L3 - длина обмотки электронагревателя по поверхности трубы;
L4 - расстояние от начала обмотки нагревателя до момента начала подъема температуры поверхности трубы;
L5 - расстояние от момента максимального достижения температуры поверхности трубы до расположения выходной термобатареи;
L1>L2 - основное условие ассиметричности расположения входной и выходной термобатареи относительно электронагревателя;
d - внутренний диаметр трубы теплового расходомера;
D - наружный диаметр трубы теплового расходомера.
На фиг.8 представлена конструктивная схема датчика - теплового расходомера.
Она состоит из проточной трубы датчика 39, на наружной поверхности которой последовательно расположены три кольцевые обмотки: входной термонагревательной батареи 40, электронагревателя 41 и выходной термобатареи 42, установленных внутри термоизолирующего кожуха 43, окаймленного двухстворчатой крышкой 44. На одной из створок крышки установлен разъем 45, через который выходят пять проводов.
А, В, С - трехфазное питание электронагревателя с пониженным напряжением и измененной частотой.
D, Е - выход дифференциального сигнала от входной и выходной термобатарей, соединенных между собой по дифферинциальной схеме.
Торцевые части трубы датчика снабжены присоединительными фланцами 46.
На фиг.9 представлена каскадная система стабилизации температуры Тт (X1) РМ в реакторе по подаче дозируемого компонента Gдк из РЕ, запрограмированная в МПК 23 (фиг.1).
Она включает в себя объект управления: реактор 1, первый сумматор 47, где AT - разница между текущим (Тт) и заданным (Тз) значениями температуры РМ, регулятор температуры РМ 48; второй сумматор 49, где ΔG - разница между заданным (переменным) (G3) и текущим (Gдк) значениями расхода дозируемого компонента, регулятор расхода дозируемого компонента 50, выполненного на основе дозатора 3 с регулируемым приводом (4 и 32) (фиг.1). Интегратор расхода 51 также запрограммирован в МПК 23.
Через Wт(p) и WpR(p) обозначены передаточные функции регуляторов: температуры РМ и расхода дозируемого компонента Gдк.
На фиг.10 представлен график сравнительной оценки длительности дозировки компонента при реализации системы управления по ближайшему аналогу [журнал "Химическая промышленность", 1991, №10, с.48-52] (τ1 - наклонная линия 1) и предложенной системы стабилизации температуры РМ с использованием статического трехканального источника питания (τ2 - наклонная линия 2). Длительность дозировки (τ1>τ2) сократилась примерно на 25-30% при управляемой подаче одного и того же первоначального объема (Vgк) дозируемого компонента из РЕ 2.
Работа устройства автоматического управления реактором протекает следующим образом.
В начале процесса, когда объем РМ минимальный, а следовательно, и минимальна поверхность теплообмена со стороны рубашки 5 и змеевика 6, расход дозируемого компонента и скорость вращения мешалки минимальны. По мере увеличения степени заполнения реактора 1 с регулятора температуры 48 по сигналу с первого сумматора 47 поступает команда регулятору расхода 50 (фиг.9) на увеличение подачи дозируемого компонента, в противном случае температура РМ начнет снижаться.
Одновременно на интеграторе расхода 51 вырабатывается управляющее воздействие (Z2) на увеличение скорости вращения мешалки 8 через статический трехканальный источник питания по каналам Z2-Y2 на двигатель мешалки 9.
Команда на периодическое реверсирование вращения двигателя мешалки 8 поступает с таймера, запрограммированного в МПК 23.
При снижении уровня дозируемого компонента в расходной емкости 2 до отметки расположения заборного патрубка 20 дозатора 3 с уровнемера 27 по каналу Х4 поступает команда в МПК 23 на остановку реактора.
Использование изобретения, помимо сокращения длительности дозировки на 25-30%, позволяет на 6-8% увеличить выход целевого продукта и также улучшить его качественные показатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294556C1 |
| СПОСОБ ПРОТИВОАВАРИЙНОЙ ЛОКАЛИЗАЦИИ АНОМАЛЬНЫХ РЕЖИМОВ ПРОЦЕССОВ НИТРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2082706C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРИГОТОВЛЕНИЯ РАСТВОРОВ В РЕАКТОРАХ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2071961C1 |
| Устройство автоматического управления экзотермическим процессом в реакторе полунепрерывного действия | 1989 |
|
SU1690840A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2002 |
|
RU2239223C2 |
| Устройство автоматического управления экзотермическим процессом в реакторе полунепрерывного действия | 1990 |
|
SU1804903A1 |
| Устройство автоматической защиты процесса нитрования | 1988 |
|
SU1685500A1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1675863A1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1672420A1 |
Изобретение относится к области управления реактором полунепрерывного действия (РПНД) при изменяемом расходе жидкого дозируемого компонента. Устройство содержит расходную емкость для жидкого дозируемого компонента, реактор, снабженный мешалкой, змеевиком и рубашкой, термопреобразователь, расположенный в реакторе, датчик уровня, установленный в расходной емкости, электропневматические дискретные преобразователи, предназначенные для управления пневмоприводами отсечных и разгрузочных клапанов, статический источник питания. Устройство дополнительно снабжено статическим трехканальным источником питания, датчиками давления и расхода на напорном патрубке дозатора и электропроводности в реакторе, измерителями частоты напряжения, подаваемого к двигателям дозатора и мешалки, а также мощности, потребляемой расходомером, микропроцессорным контроллером, предназначенным для реализации функций каскадной системы стабилизации температуры реакционной массы в реакторе и программно-импульсно-реверсивной системы регулирования скорости вращения двигателя мешалки, а также формирования управляющих воздействий, подаваемых на электропневматические преобразователи и через статический трехканальный источник питания на двигатели дозатора, мешалки и расходомер. Технический эффект - сокращение длительности дозировки, увеличение выхода целевого продукта, улучшение его качественных показателей. 10 ил., 1 табл.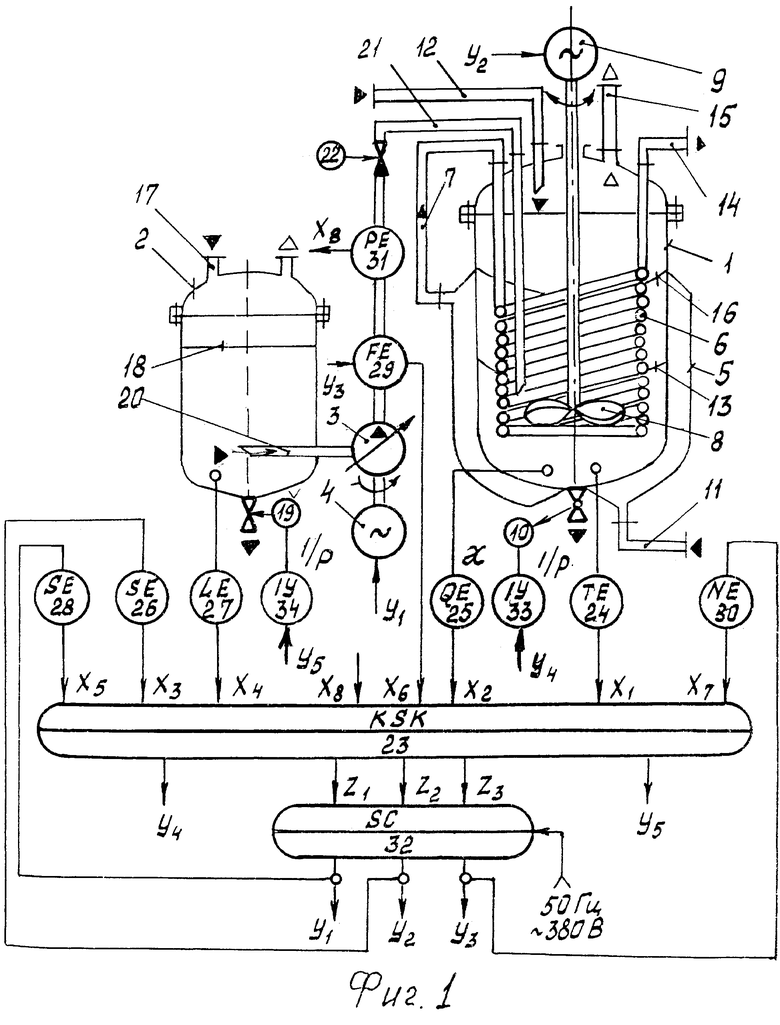
Устройство автоматического управления реактором полунепрерывного действия, содержащее расходную емкость для жидкого дозируемого компонента, реактор, снабженный мешалкой, змеевиком и рубашкой, термопреобразователь, расположенный в реакторе, датчик уровня, установленный в расходной емкости, электропневматические дискретные преобразователи, предназначенные для управления пневмоприводами отсечных и разгрузочных клапанов, статический источник питания, при этом выход с расходной емкости через дозатор соединен с патрубком реактора, отличающееся тем, что оно дополнительно снабжено статическим трехканальным источником питания, датчиками давления и расхода на напорном патрубке дозатора и электропроводности в реакторе, измерителями частоты напряжения, подаваемого к двигателям дозатора и мешалки, а также мощности, потребляемой расходомером, микропроцессорным контроллером, предназначенным для реализации функций каскадной системы стабилизации температуры реакционной массы в реакторе и программно-импульсно-реверсивной системы регулирования скорости вращения двигателя мешалки, а также формирования управляющих воздействий, подаваемых на электропневматические преобразователи и через статический трехканальный источник питания на двигатели дозатора, мешалки и расходомер, выполненный на основе теплового метода с измерением величины мощности, потребляемой электронагревателем расходомера, причем статический трехканальный источник питания снабжен общим блоком управления, двумя отдельными статическими регулируемыми преобразователями частоты и одним статическим преобразователем частоты и напряжения с регулированием величины потребляемой мощности, первый вход которого через блок управления и первый статический регулируемый преобразователь частоты и первый выход связан параллельно с первым измерителем частоты и двигателем дозатора, второй вход через блок управления и второй статический регулируемый преобразователь частоты и второй выход связан параллельно со вторым измерителем частоты и двигателем мешалки, а третий вход через статический преобразователь частоты с регулированием величины потребляемой мощности и третий выход параллельно связан с измерителем мощности и с управляющим входом теплового расходомера, расходная емкость снабжена нижним сливным патрубком с косым срезом, смещенным относительно оси расходной емкости и поднятым относительно днища расходной емкости и связанным с входом дозатора, на напорном участке которого последовательно расположены тепловой расходомер, датчик давления и обратный клапан, при этом выходы термопреобразователя, расположенного в реакторе, датчика электропроводности, измерителя частоты напряжения, подаваемого к двигателю мешалки, датчика уровня в расходной емкости, измерителя частоты напряжения, подаваемого к двигателю дозатора, термопреобразователя теплового расходомера, измерителя мощности, потребляемой тепловым расходомером, датчика давления соединены, соответственно, с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами микропроцессорного контроллера, а четвертый и пятый выходы с микропроцессорного контроллера связаны через электропневматические дискретные преобразователи с клапаном разгрузки реактора и со сливным клапаном расходной емкости, соответственно.
| САХНЕНКО В.И | |||
| и др | |||
| Автоматизированная система управления реактором полунепрерывного действия | |||
| Химическая промышленность, № 10, 1991, с.48-52 | |||
| САХНЕНКО В.И | |||
| и др | |||
| Безопасное управление процессом нитрования фурфурола в реакторе полунепрерывного действия | |||
| Химико-фармацевтический журнал, 1993, № 3, с.53-57 | |||
| Способ автоматического управления технологическим процессом в реакторе полунепрерывного действия | 1974 |
|
SU498957A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Устройство для управления реактором полунепрерывного действия | 1984 |
|
SU1230667A1 |
| US 4589072 A, 13.05.1986. | |||

