Область техники
Изобретение относится к электроэнергетике, и в частности к управлению генерирующими электроэнергетическими установками, содержащими первичный двигатель, генератор и выходной преобразователь частоты.
Уровень техники
Наличие преобразователя частоты на выходе генерирующей установки дает возможность получать переменное напряжение или ток, модуль и фаза которых непосредственно не связаны со скоростью вращения генератора. Это, с одной стороны, позволяет использовать первичный двигатель на фиксированной скорости вращения, оптимальной по экономическим показателям (например, расходу топлива, кпд), или изменять ее, добиваясь экономии топлива при переменной нагрузке. С другой стороны, в случае применения такой установки в системе автономного энергоснабжения (САЭС) наличие преобразователя дает возможность, не изменяя скорость вращения первичного двигателя, регулировать частоту так, чтобы оптимизировать режим работы потребителя.
Однако в отличие от электроэнергетических установок, в которых генераторы непосредственно (без преобразования частоты) работают на сеть или изолированную нагрузку (т.е. от обычных электрогенераторов), критерии управления установкой с преобразователем частоты существенно меняются в зависимости от того, в каких возможных условиях она работает:
- в мощной энергосистеме, где частота и напряжение не определяются данной установкой;
- в САЭС параллельно с обычными генераторами соизмеримой мощности;
- в САЭС с одной или несколькими аналогичными установками, питающими изолированную нагрузку.
Известен способ управления генерирующей электроэнергетической установкой, содержащей первичный двигатель, генератор и выходной преобразователь частоты, путем воздействия на регулятор скорости вращения первичного двигателя в соответствии с величиной тока, потребляемого от выходного преобразователя частоты [опубл. заявка РСТ WO 01/86802, 2001 г.]. Однако такой способ управления может быть эффективно применен, если установка работает на изолированную нагрузку (т.е. только в последнем из перечисленных выше случаев).
Известен выбранный в качестве прототипа способ управления генерирующей электроэнергетической установкой, содержащей снабженные блоками управления источник электроэнергии (например, генератор с турбиной) и выходной преобразователь частоты [пат. РФ №2216847, опубл. 20.11.2003 г., БИ №32]. Согласно прототипу измеряют ток и напряжение на выходе установки и вырабатывают в соответствии с заданными значениями этих параметров управляющие сигналы, воздействующие на блоки управления преобразователем и источником электроэнергии.
Недостаток способа-прототипа состоит в том, что при работе в электрической сети параллельно с обычными генераторами отсутствует возможность управлять мощностью, выдаваемой установкой, в соответствии с быстрыми изменениями нагрузки, и все изменения нагрузки в сети воспринимаются обычными генераторами. Это снижает эффективность использования таких установок в сетях, где их суммарная номинальная мощность соизмерима с суммарной мощностью других источников, и, кроме того, требует вмешательства персонала для перенастройки управления при изменениях конфигурации сети.
Сущность изобретения
Задача изобретения - обеспечить универсальное управление установкой, при котором ее активная и реактивная мощности во всех возможных условиях ее использования, перечисленных выше, а также при изменениях конфигурации сети (например, при подключении к сети или отключении от нее синхронных генераторов, работающих параллельно с установкой) автоматически изменялись бы при изменениях электрической нагрузки подобно тому, как это происходит в обычных синхронных генераторах - без вмешательства персонала, без необходимости перенастроим системы управления или переключений в ней.
Предметом изобретения является способ управления генерирующей электроэнергетической установкой, содержащей первичный двигатель с регулятором скорости вращения, источник переменного тока и преобразователь частоты, который заключается в том, что измеряют значения выходного напряжения и выходного тока установки, регулируют модуль выходного векторного параметра преобразователя в соответствии с заданными значениями выходного напряжения и максимально допустимого тока установки, определяют активную мощность, вырабатываемую установкой, моделируют нагруженный этой мощностью генератор с турбиной, снабженной регулятором скорости вращения, определяют изменение угла поворота ротора моделируемого генератора, вызванное текущими отклонениями его скорости вращения от номинальной, и корректируют в соответствии с этим изменением фазу выходного векторного параметра преобразователя.
Эта совокупность признаков позволяет решить задачу изобретения.
Способ имеет развития и уточнения, которые состоят в следующем:
- в частных случаях выполнения преобразователя частоты в виде источника напряжения или источника тока в качестве выходного векторного параметра используют ЭДС, формируемую в преобразователе, или его выходной ток соответственно,
- отклонения скорости вращения моделируемого генератора от номинальной могут ограничивать по абсолютной величине,
- для моделируемого генератора задают его параметры: уставку по мощности и располагаемую мощность турбины, механическую постоянную инерции, коэффициент демпфирования колебаний скорости вращения, коэффициент статизма и постоянную времени регулирования скорости вращения,
- уставку по мощности турбины моделируемого генератора могут изменять в процессе управления установкой;
- механическую постоянную инерции, коэффициенты статизма и демпфирования моделируемого генератора могут оптимизировать с учетом конфигурации и параметров генераторов сети, в которой работает установка.
Краткое описание чертежей
На фиг.1 приведена схема электроэнергетической установки. Фиг.2 и 3 иллюстрируют описываемый ниже пример осуществления предлагаемого способа.
Осуществление изобретения
На фиг.1 показаны:
1 - первичный двигатель, например газовая турбина;
2 - источник переменного тока, например синхронный генератор,
3 - преобразователь частоты, например статический инвертор со своей системой управления вентилями, снабженный выходным фильтром;
4 - блок управления преобразователем 3, выполненный на основе программируемого вычислительного устройства, например микропроцессора;
5 - блок, сопрягающий блок 4 с преобразователем 3;
6 - шины энергообъекта, к которым подключена установка;
7 и 8 - датчики выходного тока и выходного напряжения установки;
9 - блок автономного управления первичным двигателем 1, например регулятор скорости вращения турбины;
10 - блок автономного управления источником 2, например регулятор напряжения синхронного генератора, изменяющий его ток возбуждения;
11 - нагрузка.
На фиг.2 и 3 представлены фрагменты математических моделей, используемых в описываемом примере осуществления способа.
От датчиков 7 и 8 (см. фиг.1) в блок 4 поступают сигналы i и u, соответствующие измеренным мгновенным значениям тока и напряжения установки, которые после преобразования в цифровые величины используются для вычислений, производимых в блоке 4. В частности, по измеренным значениям i и u в блоке 4 могут быть вычислены текущие значения действующего тока I, действующего напряжения U, активной мощности P и реактивной мощности Q установки. (Значения I, U, P и Q могут также определяться непосредственными измерениями с помощью соответствующих датчиков, не показанных на фиг.1). Кроме того, как показано на фиг.1, в блок 4 поступают сигналы, соответствующие уставкам, т.е. величинам, задаваемым при осуществлении управления. Уставки также могут задаваться при программировании блока 4.
Блок 4 подключен своим выходом 12 к блоку 5, вырабатывающему трехфазный управляющий сигнал 13 для преобразователя 3. Каждая фаза этого сигнала представляет собой, например, сигнал широтно-импульсной модуляции (ШИМ сигнал) с изменяемыми амплитудой, фазой и частотой.
Блок 4 выполнен с возможностью преобразования входных сигналов в цифровые величины, выполнения запрограммированных вычислений и формирования на выходе 12 цифровых сигналов управления, поступающих в блок 5.
Блок 5 изменяет ШИМ сигнал 13 так, чтобы параметры электроэнергии, вырабатываемой преобразователем 3, соответствовали цифровым значениям сигналов управления на выходе 12.
Предлагаемый способ может быть осуществлен, например, следующим образом.
Блок 4 формирует на выходе 12 цифровые сигналы управления, значения которых соответствуют требуемым значениям модуля и фазы управляемого векторного параметра преобразователя 3. В случае, когда преобразователь 3 является преобразователем напряжения, в качестве управляемого параметра используют вектор ЭДС преобразователя, а в случае, когда преобразователь 3 является преобразователем тока, - вектор тока.
Требуемые значения модуля E ЭДС, вырабатываемой преобразователем 3, и ее фазы Ψ определяют в блоке 4, например, следующим образом.
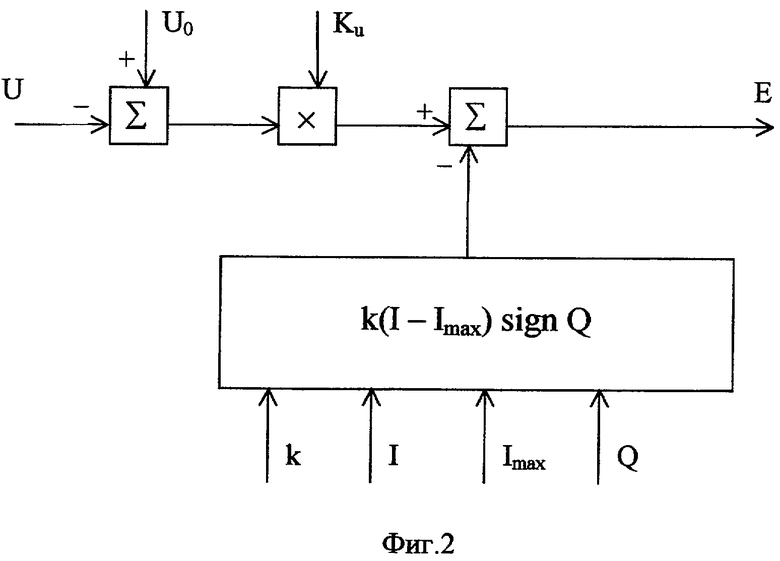
Значение E определяют (см. фиг.2) как величину, обеспечивающую поддержание заданного уставкой U0 напряжения на шинах 6 в соответствии с равенством
E=KU·(U0-U)-k·(I-Imax)·sign(Q),
где KU - коэффициент регулирования напряжения, U0 - уставка по напряжению, k - согласующий коэффициент, имеющий размерность сопротивления. Знак реактивной мощности Q считается положительным при выдаче ее установкой. Второе слагаемое принимается равным нулю при I<Imax и отражает дополнительное воздействие на величину E, обеспечивающее ограничение выходного тока преобразователя 3, начиная со значения I=Imax.
Требуемое значение фазы Ψ вычисляют следующим образом (см. фиг.1 и 3).
С помощью соответствующего датчика или используя цифровые величины мгновенных значений i и u определяют текущую активную мощность P на выходе преобразователя 3. В блоке 4 создают математическую модель синхронного генератора, нагруженного мощностью P и вращаемого турбиной, имеющей располагаемую мощность Pmax и снабженной собственным регулятором скорости вращения.
На этой модели определяют ΔΨ - текущее изменение угла поворота ротора и соответственно изменяют цифровое значение Ψ на выходе 12 блока 4.
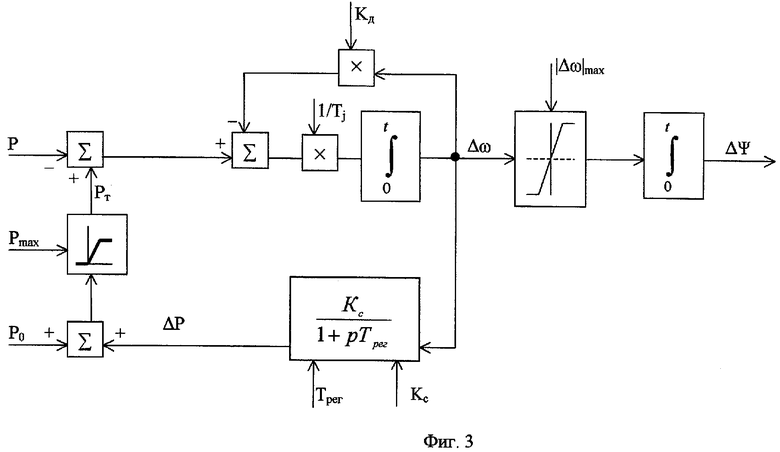
Построение модели и определение величины ΔΨ может быть осуществлено, например, следующим образом (см. фиг.3).
Вначале, например, при программировании блока 4, для моделируемого генератора задают Рmax и TJ - механическую постоянную инерции и коэффициент демпфирования Kд, отражающий демпфирование колебаний скорости вращения моделируемым генератором, а также параметры регулирования скорости вращения турбины: постоянную времени Трег, коэффициент статизма Кс. Величины Рmax, ТJ, Кc и Кд могут оптимизировать, например, при наладке с учетом конфигурации и параметров генераторов сети, в которой работает установка. Кроме того, оперативно задается уставка P0 по мощности турбины моделируемого генератора
На модели, структуру которой иллюстрирует фиг.3, в ходе управления установкой вычисляют отклонение угловой скорости вращения Δω моделируемого генератора от его номинальной скорости как величину, пропорциональную интегралу
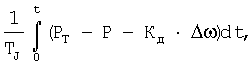
где Рт - текущая мощность турбины моделируемого генератора. Мощность Pт представляет собой ограниченную величиной Pmax сумму P0+ΔP, где ΔР - отклонение мощности турбины моделируемого генератора от уставки P0, определяемое как функция Δω, например, с помощью показанного на фиг.3 элемента модели в виде передаточной функции  (модель апериодического звена регулирования).
(модель апериодического звена регулирования).
Значение ΔΨ получают интегрированием отклонения Δω, которое, как показано на фиг.3, может быть предварительно ограничено по модулю задаваемой при программировании блока 4 величиной Δωmax. В соответствии с полученной величиной ΔΨ изменяют цифровое значение Т на выходе 12 блока 4 (см. фиг.1).
Цифровые значения Е и Ψ, полученные, например, как описано выше, поступают с выхода 12 блока 4 в блок 5, формирующий трехфазный ШИМ сигнал 13 управления преобразователем 3. В результате преобразователь 3 вырабатывает ЭДС с соответствующими значениями модуля и фазы, обеспечивающими требуемые параметры электроэнергии на выходе установки.
Изложенное описывает осуществление способа в том случае, если используемый в установке преобразователь 3 выполнен по схеме преобразователя напряжения и, следовательно, является источником ЭДС. В том случае, когда используемый преобразователь 3 выполнен по схеме преобразователя тока и, следовательно, является источником тока, необходима модификация способа, которая состоит в следующем.
Поскольку управляемым параметром преобразователя в этом случае является вектор выходного тока, полученные значениями Е и Ψ не поступают на выход 12, а используются в блоке 4 для вычисления двух других цифровых управляющих величин I1 и Ψ1, соответствующих требуемым значениям модуля и фазы выходного тока преобразователя 3. Величины I1 и Ψ1 могут быть вычислены в блоке 4, например, следующим образом.
По формулам (1)и (2)


вычисляются реактивная мощность Q1 и значение I1, требуемые для поддержания заданного уставкой U0 напряжения на шинах 6. Второе слагаемое в уравнении (1) принимается равным нулю при I<Imax и обеспечивает необходимое ограничение выходного тока преобразователя 3 аналогично описанному выше.
Определение другой управляющей величины Ψ1 осуществляется вычислением по формуле Ψ1=Ψ-ϕ1, где значение угла ϕ1 находится из равенства P=E·I1·cosϕ1.
Изменение выходного векторного параметра (ЭДС или тока) преобразователя 3 в соответствии со значениями его модуля и фазы, полученными как описано выше, обеспечивает адекватное изменение нагрузки синхронного генератора 2, питающего преобразователь 3 (см. фиг.1) Это, в свою очередь, приводит к соответствующим отклонениям скорости вращения турбины 1, которые воспринимает и отрабатывает регулятор 9, воздействуя на подачу энергоносителя в турбину 1.
Предлагаемый способ позволяет обеспечить единообразное управление установкой как в мощной энергосистеме, так и в небольших сетях при мощности установки, соизмеримой с параллельно работающими в сети генераторами 14, а также для питания изолированной нагрузки. При этом переход от одних указанных условий работы к другим не требует перенастройки системы управления. В этом смысле установки, использующие предлагаемый способ, имитируют обычные синхронные генераторы, сохраняя при этом все указанные выше достоинства установок с преобразованием электроэнергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498494C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2007 |
|
RU2360137C1 |
| СПОСОБ БЫСТРОДЕЙСТВУЮЩЕГО УПРАВЛЕНИЯ ПЕРЕТОКОМ АКТИВНОЙ МОЩНОСТИ | 2011 |
|
RU2449446C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ С ВЕТРОГЕНЕРАТОРАМИ | 2020 |
|
RU2754455C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2015 |
|
RU2592641C1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |
| Регулятор-ограничитель мощности турбоагрегата | 1984 |
|
SU1231559A1 |
| Способ управления режимом параллельной работы синхронных генераторов в электрических сетях | 2020 |
|
RU2752248C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2020 |
|
RU2747785C1 |
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
Изобретение относится к электроэнергетике. Технический результат заключается в обеспечении универсальности управления установкой во всех возможных условиях ее использования: при переходе от работы на мощную сеть к работе в автономной энергосистеме или к питанию изолированной нагрузки (и обратно), что присуще синхронным генераторам, без необходимости выполнения переключений в системе управления установкой, перенастройки. Для этого в способе измеряют значения выходного напряжения и выходного тока установки, регулируют модуль выходного векторного параметра преобразователя в соответствии с заданными значениями выходного напряжения и максимально допустимого тока установки, определяют активную мощность, вырабатываемую установкой, моделируют нагруженный этой мощностью генератор с турбиной, снабженной регулятором скорости вращения, определяют изменение угла поворота ротора моделируемого генератора, вызванное текущими отклонениями его скорости вращения от номинальной, и корректируют в соответствии с этим изменением фазу выходного векторного параметра преобразователя. В частных случаях выполнения преобразователя частоты в виде источника напряжения или источника тока в качестве выходного векторного параметра используют ЭДС преобразователя или его выходной ток соответственно. 6 з.п.ф-лы, 3 ил.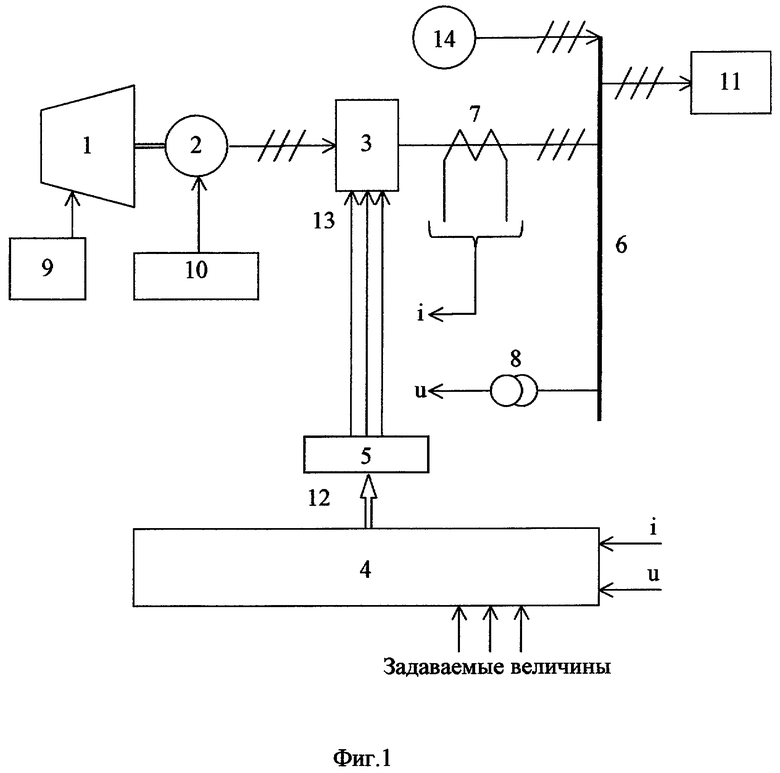
| ГИБРИДНОЕ ГЕНЕРАТОРНОЕ УСТРОЙСТВО | 1997 |
|
RU2216847C2 |
| RU 94046166 A1, 20.09.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ТУРБОГЕНЕРАТОРА ДЛЯ ПРЕДУПРЕЖДЕНИЯ ПЕРЕГРУЗКИ ЛИНИЙ СВЯЗИ ТУРБОГЕНЕРАТОРА С ЭНЕРГОСИСТЕМОЙ И ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАБОТЫ | 1991 |
|
RU2016492C1 |
| 0 |
|
SU351477A1 | |
| US 4908565 A, 13.03.1990. | |||

