Область техники, к которой относится изобретение
Настоящее изобретение относится к электроэнергетике, а более точно к способу улучшения динамической устойчивости и демпфирования электромеханических колебаний электроэнергетических систем и устройству для осуществления этого способа.
Изобретение может быть использовано для улучшения динамической устойчивости электроэнергетических систем (ЭЭС), а также для демпфирования электромеханических колебаний ротора генератора. Под динамической устойчивостью понимают свойство системы возвращаться в нормальный режим работы и близкий к нему после больших возмущений, таких как короткое замыкание, разрыв сети, отключение электрических генераторов, изменение мощности нагрузки в большом объеме. Электромеханические колебания возникают вследствие возмущений в системе или являются результатом работы несогласованно настроенных систем автоматического управления элементами ЭЭС: синхронного генератора, управляемых источников реактивной мощности и других устройств.
Предшествующий уровень техники
Электроэнергетические системы предназначены для экономичного и надежного обеспечения потребителей электрической энергией в требуемых объемах и надлежащего качества. ЭЭС включают в свой состав первичные двигатели (паровые, гидравлические и газовые турбины, поршневые двигатели на жидком и газообразном топливе) и синхронные генераторы для выработки электрической энергии, которые называют генерирующими агрегатами (ГА), повышающие и понижающие силовые трансформаторы для изменения величины напряжения и тока электроэнергии, линии электропередачи для передачи электроэнергии на расстояние, коммутирующую аппаратуру, включающую в себя выключатели и разъединители для изменения конфигурации сети и коммутации токовых цепей. Электроэнергия вырабатывается ГА, затем преобразуется в трансформаторах, при этом увеличивается напряжение и уменьшается ток без изменения мощности и передается по линиям электропередачи к местам потребления электроэнергии. Как правило, линии электропередачи соединены в электрическую сеть. Затем электроэнергия через понижающие трансформаторы, посредством которых уменьшается напряжение и увеличивается ток, подводится к потребителям электроэнергии. Кроме названных устройств ЭЭС содержит оборудование для измерения параметров, т.е. частоты, напряжения, тока, мощности, и регулирования режима ЭЭС.
Основной режим, в котором работает ЭЭС - это нормальный режим, характеризующийся экономичным и надежным снабжением потребителей электрической энергией. Кроме нормального режима ЭЭС может работать в утяжеленном, аварийном, послеаварийном и нормальном переходном режиме. Аварийный режим является кратковременным, как правило, его длительность определяется временем срабатывания средств релейной защиты и автоматики ЭЭС и коммутирующей аппаратуры. Затем система переходит в послеаварийный режим. Переход от аварийного режима к послеаварийному называется переходным процессом. В переходном процессе имеются два процесса - электромагнитный и электромеханический. Электромагнитный переходный процесс происходит в электрической части ЭЭС быстро (миллисекунды), электромеханический происходит как в механической части, так и в электрической и связан с движением роторов генерирующих агрегатов и протекает от долей до нескольких секунд. Если система после приложения большого возмущения, например, в результате короткого замыкания, отключения/включения большого объема нагрузки, аварийного отключения генерирующих мощностей возвращается в состояние до возмущения или близкое к нему, то можно говорить, что система обладает динамической устойчивостью.
Можно говорить об улучшении условий динамической устойчивости ЭЭС, если имеется возможность во время электромеханического переходного процесса управлять электромагнитным и/или механическим моментом на валу генерирующего агрегата. Для улучшения условий динамической устойчивости ЭЭС используется устройство форсировки возбуждения генератора, устройство компенсации индуктивного сопротивления линии электропередачи, устройство электрического торможения ротора синхронного генератора.
Устройство (фиг.1) форсировки возбуждения генератора осуществляет увеличение в несколько раз напряжения на обмотке 10(1) возбуждения синхронного генератора 10 при возникновении скольжения ротора синхронного генератора или при снижении напряжения на зажимах генератора ниже 85% от номинального значения (условия срабатывания). Устройство форсировки возбуждения генератора состоит из устройства сравнения (скольжения или напряжения или и того и другого) и источника напряжения. При выполнении условий срабатывания подается сигнал напряжения от источника напряжения в систему возбуждения синхронного генератора, что приводит к увеличению напряжения на зажимах обмотки возбуждения до величины, превышающей ее номинальное значение в количество раз, равное кратности форсировки возбуждения. В свою очередь, ток в обмотке возбуждения начинает возрастать по экспоненциальному закону с постоянной времени обмотки возбуждения, которая составляет для генераторов различных типов и мощности от 2,7 до 13 секунд. Для наиболее распространенных турбогенераторов эта величина составляет порядка 7 секунд.
Принцип действия форсировки возбуждения заключается в увеличении тока возбуждения генератора и, следовательно, в увеличении электромагнитного момента, что в определенных случаях позволяет сохранить генератору синхронную устойчивость после приложения возмущающего воздействия, например короткого замыкания.
При применении автоматического регулирования возбуждения (АРВ) 10(2) с форсировкой возбуждения для улучшения условий динамической устойчивости скорость возрастания электромагнитного момента генератора существенно лимитируется, причем в большей степени постоянной времени обмотки возбуждения и в меньшей степени постоянной времени возбудителя, что и ограничивает возможности данного способа улучшения условий динамической устойчивости. Кроме того, величина электромагнитного момента обратно пропорциональна электрическому сопротивлению между узлом присоединения генератора и узлом приемной системы, а после коротких замыканий возможно увеличение этого сопротивления за счет отключения цепей линий электропередачи в результате правильного или ложного срабатывания релейной защиты и автоматики ЭЭС. Таким образом, эффективность применения АРВ с форсировкой возбуждения снижается при отключении цепей линии электропередачи.
В целом, эффективность применения АРВ с форсировкой возбуждения зависит от постоянных времени генератора, текущего состояния электрической сети и ее режима, что не позволяет эффективно во всех состояниях управлять балансом моментов на валу ГА.
Использование устройства форсировки возбуждения имеет следующие недостатки:
невозможно быстро увеличивать электромагнитный момент генератора из-за относительно большой постоянной времени обмотки возбуждения синхронного генератора (порядка 7 секунд);
сильная зависимость электромагнитного момента генератора от схемы и режима ЭЭС после снятия возмущающего воздействия.
Устройство (фиг.2) для компенсации реактивного сопротивления линии используется для увеличения электромагнитного момента на валу генератора. Компенсация реактивного сопротивления линии осуществляется путем включения в линию емкостного сопротивления, например батарей конденсаторов, величина которого определяется степенью компенсации линии. При компенсации части сопротивления линии увеличивается электромагнитный момент генератора при прочих равных условиях, и это позволяет улучшить условия динамической устойчивости, и в определенных случаях позволяет сохранить генератору синхронную устойчивость после приложения возмущающего воздействия, например короткого замыкания.
При применении устройства компенсации индуктивного сопротивления линии электропередачи увеличение электромагнитного момента зависит, в том числе, и от напряжений на концах линии электропередачи, которые снижаются во время протекания переходных процессов в ЭЭС, что уменьшает эффективность применения этого метода.
В целом, эффективность компенсации реактивного сопротивления линии электропередачи в большой степени зависит от текущего состояния электрической сети и ее режима, что не позволяет эффективно управлять балансом моментов на валу ГА.
Ближайшим техническим решением является способ электрического торможения (ЭТ) ротора синхронного генератора, осуществляемый с помощью устройства электрического торможения.
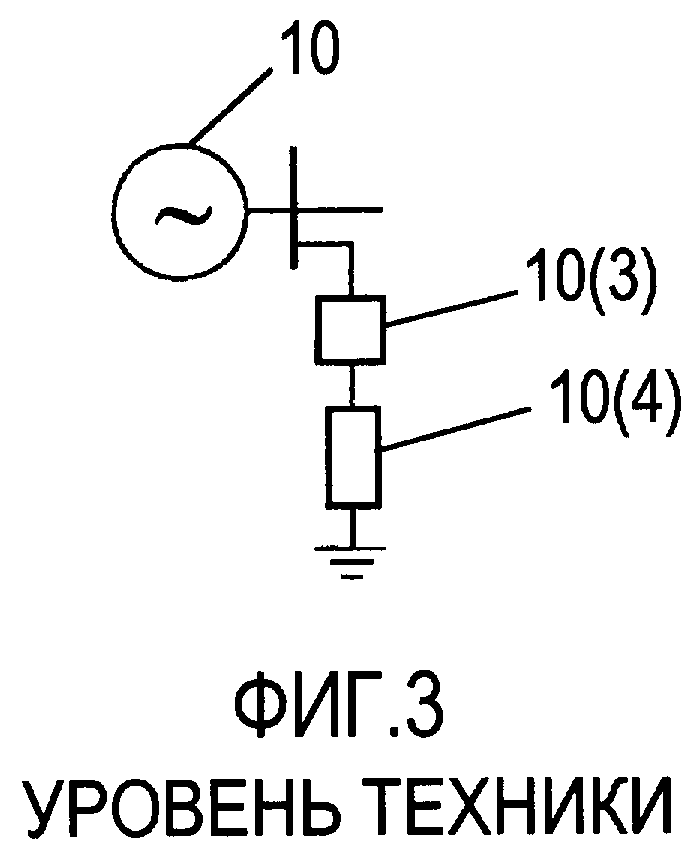
Электрическое торможение осуществляют путем подключения на шины генератора тормозного активного сопротивления (фиг.3). При включении сопротивления на валу ГА создается дополнительный электромагнитный момент, который приводит к торможению. Для подключения тормозного активного сопротивления 10(4) используют механический силовой выключатель 10(3) или ключ на основе силовой полупроводниковой электроники.
При включении тормозного сопротивления электромагнитный момент на валу ГА существенно зависит от величины напряжения в месте присоединения этого сопротивления. Для коммутации тормозного активного сопротивления требуется быстродействующий высоковольтный выключатель, который обладает относительно небольшим ресурсом, или электронный ключ, который выполняется в высоковольтном исполнении и на большие токи коммутации, что довольно дорого. Включение тормозного активного сопротивления приводит к снижению напряжения в точке его присоединения. При снижении напряжения происходит уменьшение электромагнитного момента генератора, что ухудшает условия электрического торможения вала ГА и снижает эффективность этого способа. Для устранения снижения напряжения дополнительно наряду с тормозным сопротивлением нужно устанавливать компенсатор реактивной мощности, который имеет большую стоимость и, кроме того, будет простаивать в ожидании использования электрического торможения, хотя его можно было бы использовать для регулирования напряжения в других узлах электрической сети.
К недостаткам указанного способа использования электрического торможения относятся:
сильная зависимость создаваемого тормозящего момента на валу ГА от уровня напряжения в точке присоединения тормозного активного сопротивления, что снижает эффективность применения электрического торможения при снижении напряжения;
снижение напряжения в точке присоединения тормозного активного сопротивления, что может вызвать ухудшение условий динамической устойчивости ЭЭС в целом;
необходимость выделения площади для строительства тормозных активных сопротивлений.
Существо изобретения
Технической задачей настоящего изобретения является создание способа улучшения динамической устойчивости электроэнергетической системы, который позволил бы исключить зависимость создаваемого тормозящего момента на валу генерирующего агрегата (ГА) от сопротивления линии и уровней напряжений на электропередаче, соединяющей генерирующий агрегат и приемную систему, исключить необходимость применения дополнительных высоковольтных выключателей, полупроводниковых ключей и другой аппаратуры, исключить необходимость выделения площадей для строительства тормозных активных сопротивлений.
Другой задачей настоящего изобретения является создание способа демпфирования электромеханических колебаний электроэнергетической системы.
Еще одной задачей настоящего изобретения является создание устройства для улучшения динамической устойчивости электроэнергетической системы, конструктивное выполнение которого позволило бы исключить зависимость создаваемого тормозящего момента на валу ГА от уровня напряжения в точке присоединения устройства.
Еще одной задачей настоящего изобретения является создание устройства для демпфирования электромеханических колебаний электроэнергетической системы.
Поставленная задача решена путем создания способа улучшения динамической устойчивости электроэнергетической системы, содержащей множество первичных двигателей и синхронных генераторов переменного тока, силовых трансформаторов, линий электропередачи, коммутирующую аппаратуру и нагрузку, заключающегося в том, что осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока, снижают скорость вращения ротора синхронного генератора после приложения возмущения к системе до скорости вращения магнитного поля статора, указанный способ характеризуется тем, что уменьшение скорости вращения ротора генератора осуществляют путем механического торможения указанного ротора генератора, для чего осуществляют механическое соединение электромагнитного тормоза, размещенного соосно с валом генератора и валом первичного двигателя, с ротором генератора и ротором первичного двигателя посредством муфт, непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора, сравнивают полученное значение электромагнитной мощности генератора со значением электромагнитной мощности до приложения возмущения, в случае, если величина сравнения превышает заданное значение, формируют управляющий сигнал на включение электромагнитного тормоза, при этом величину тормозного момента определяют по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения, и длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения, отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой мощности и мощности до приложения возмущения.
Целесообразно, чтобы при осуществлении механического соединения электромагнитный тормоз размещали в положении, выбранном из группы, состоящей из: со стороны генератора, со стороны первичного двигателя, между генератором и первичным двигателем.
В альтернативном варианте выполнения поставленная задача решена путем создания способа улучшения динамической устойчивости электроэнергетической системы, содержащей множество первичных двигателей и синхронных генераторов переменного тока, силовых трансформаторов, линий электропередачи, коммутирующую аппаратуру и нагрузку, заключающегося в том, что осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока, снижают скорость вращения ротора синхронного генератора после приложения возмущения к системе до скорости вращения магнитного поля статора, указанный способ характеризуется тем, что уменьшение скорости вращения ротора генератора осуществляют путем механического торможения указанного ротора генератора, для чего осуществляют механическое соединение электромагнитного тормоза, размещенного соосно с валом генератора и валом первичного двигателя, с ротором генератора и ротором первичного двигателя посредством муфт, непрерывно измеряют напряжение на зажимах генератора, сравнивают полученное значение напряжения на зажимах генератора с заданным значением напряжения, которое находится в пределах от 65% до 95% от номинального значения напряжения, в случае, если величина сравнения ниже заданного значения, формируют управляющий сигнал на включение электромагнитного тормоза, при этом дополнительно непрерывно измеряют ток статора генератора, определяют электромагнитную мощность генератора по измеренным значениям напряжения и тока, сравнивают полученное значение электромагнитной мощности генератора со значением электромагнитной мощности до приложения возмущения, определяют величину тормозного момента по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения, длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения, отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой мощности и мощности до приложения возмущения.
Полезно, чтобы при осуществлении механического соединения электромагнитный тормоз размещали в положении, выбранном из группы, состоящей из: со стороны генератора, со стороны первичного двигателя, между генератором и первичным двигателем.
В альтернативном варианте выполнения поставленная задача решена путем создания способа улучшения динамической устойчивости электроэнергетической системы, содержащей множество первичных двигателей и синхронных генераторов переменного тока, силовых трансформаторов, линий электропередачи, коммутирующую аппаратуру и нагрузку, заключающегося в том, что осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока, снижают скорость вращения ротора синхронного генератора после приложения возмущения к системе до скорости вращения магнитного поля статора, указанный способ характеризуется тем, что уменьшение скорости вращения ротора генератора осуществляют путем механического торможения указанного ротора генератора, для чего осуществляют механическое соединение электромагнитного тормоза, размещенного соосно с валом генератора и валом первичного двигателя, с ротором генератора и ротором первичного двигателя посредством муфт, детектируют наличие отклонения скорости вращения ротора генератора как результат приложения возмущения к системе и определяют разность скоростей вращения между измеренной скоростью и скоростью вращения до приложения возмущения, сравнивают полученную разность с заданным значением, в случае, если величина сравнения выше заданного значения, формируют управляющий сигнал на включение электромагнитного тормоза, при этом непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора, определяют величину тормозного момента по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения, длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения, отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой мощности и мощности до приложения возмущения.
Целесообразно, чтобы при осуществлении механического соединения электромагнитный тормоз размещали в положении, выбранном из группы, состоящей из: со стороны генератора, со стороны первичного двигателя, между генератором и первичным двигателем.
Поставленная задача решена также путем создания способа демпфирования электромеханических колебаний электроэнергетической системы, заключающегося в том, что осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока, напряжения и тока статора, непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора, определяют производную от напряжения на зажимах генератора по времени, определяют производную от тока статора генератора по времени, определяют отклонение измеряемой скорости вращения ротора от скорости вращения в установившемся режиме, определяют производную от измеряемой скорости вращения ротора по времени, суммируют полученные сигналы производных напряжения, тока, отклонения скорости вращения ротора генератора и величины отклонения скорости вращения и получают управляющий электрический сигнал, который подают на преобразователь напряжения для демпфирования колебаний.
Поставленная задача решена также путем создания способа улучшения динамической устойчивости и демпфирования электромеханических колебаний электроэнергетической системы, содержащей множество первичных двигателей и синхронных генераторов переменного тока, силовых трансформаторов, линий электропередачи, коммутирующую аппаратуру и электрические нагрузки, заключающийся в том, что осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока, осуществляют снижение скорости вращения ротора синхронного генератора после приложения возмущения к системе до скорости вращения магнитного поля статора, согласно изобретению уменьшение скорости вращения ротора генератора осуществляют путем механического торможения указанного ротора генератора, для чего осуществляют механическое соединение электромагнитного тормоза, размещенного соосно с валом генератора и валом первичного двигателя, с ротором генератора и ротором первичного двигателя посредством муфт, непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора, сравнивают полученное значение электромагнитной мощности генератора со значением электромагнитной мощности до приложения возмущения, в случае, если величина сравнения превышает заданное значение, формируют управляющий сигнал на включение электромагнитного тормоза, при этом величину тормозного момента определяют по разности измеренной электромагнитной мощности и значения электромагнитной мощности до приложения возмущения, и длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения, затем осуществляют демпфирование электромеханических колебаний электроэнергетической системы, для чего определяют производную от напряжения на зажимах генератора по времени, определяют производную от тока статора генератора по времени, определяют отклонение измеряемой частоты вращения ротора от частоты вращения в установившемся режиме, определяют производную от измеряемой частоты вращения ротора по времени, суммируют полученные сигналы производных напряжения, тока, отклонения скорости вращения ротора генератора и величины отклонения скорости вращения и получают управляющий электрический сигнал, который подают на преобразователь напряжения для демпфирования колебаний.
Поставленная задача решена также путем создания системы улучшения динамической устойчивости и демпфирования электромеханических колебаний электроэнергетической системы, содержащей множество первичных двигателей и синхронных генераторов переменного тока, силовых трансформаторов, линий электропередачи, коммутирующую аппаратуру и электрические нагрузки, указанная система содержит датчик скорости вращения ротора генератора, средство снижения скорости вращения ротора генератора после приложения возмущения к системе до скорости вращения магнитного поля статора, выполненное в виде электромагнитного тормоза, содержащего тормозной диск, электромагнитную систему, образованную магнитопроводом и катушкой индуктивности, причем диск размещен в зазоре магнитопровода, согласно изобретению электромагнитный тормоз размещен соосно с валом генератора и валом первичного двигателя и механически связан с ротором генератора и ротором первичного двигателя посредством муфт, при этом система содержит блок управления, предназначенный для формирования сигналов управления электромагнитным тормозом и содержащий блок определения электромагнитной мощности генератора, блок сравнения значения электромагнитной мощности генератора после приложения возмущения со значением электромагнитной мощности до приложения возмущения, блок формирования управляющего сигнала на включение электромагнитного тормоза в случае, если величина сравнения превышает заданное значение, при этом система содержит также датчик напряжения на зажимах генератора и датчик тока статора генератора, подключенные к блоку управления, к которому также подключен датчик скорости вращения ротора генератора, преобразователь величины тормозного момента и длительности тормозного момента, входом подключенный к выходу блока управления, а выходом - к катушке электромагнитного тормоза, источник питания, электрически связанный с преобразователем.
Предпочтительно, чтобы для механического соединения электромагнитный тормоз был размещен в положении, выбранном из группы, состоящей из: со стороны генератора, со стороны первичного двигателя, между генератором и первичным двигателем.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображает схему устройства форсировки возбуждения генератора, согласно предшествующему уровню техники.
Фиг.2 - схему устройства для компенсации реактивного сопротивления линии, согласно предшествующему уровню техники.
Фиг.3 - схему электрического торможения, согласно предшествующему уровню техники.
Фиг.4 - схему системы улучшения динамической устойчивости, в которой электромагнитный тормоз присоединен между первичным двигателем и генератором, согласно изобретению.
Фиг.5 - схему системы управления электромагнитным тормозом, согласно изобретению.
Фиг.6 - схему системы улучшения динамической устойчивости, в которой электромагнитный тормоз присоединен к генератору, согласно изобретению.
Фиг.7 - схему системы улучшения динамической устойчивости, в которой электромагнитный тормоз присоединен к первичному двигателю, согласно изобретению.
Фиг.8 - схему установки катушек индуктивности магнитной системы по окружности в аксиальном направлении к тормозному диску, согласно изобретению.
Фиг.9 - схему объединенной системы улучшения динамической устойчивости и демпфирования электромеханических колебаний, согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
Система улучшения динамической устойчивости электроэнергетической системы, содержащей множество первичных двигателей и синхронных генераторов переменного тока, силовых трансформаторов, линий электропередачи, коммутирующую аппаратуру и нагрузку, содержит датчик 1 (фиг.4) скорости вращения ротора генератора и средство 2 снижения скорости вращения ротора генератора во время и после приложения возмущения к системе до скорости вращения магнитного поля статора. Средство 2 выполнено в виде электромагнитного тормоза 3, содержащего тормозной диск 4, электромагнитной системы, образованной магнитопроводом 5 и катушкой 6 индуктивности, причем тормозной диск 4 размещен в зазоре 7 магнитопровода 5.
Вал 8 электромагнитного тормоза 3 размещен соосно с валом 9 генератора 10 и валом 11 первичного двигателя 12 и механически связан с валом 9 генератора и валом 11 первичного двигателя посредством муфт 13, 14, соответственно.
Система содержит также блок 15 управления, предназначенный для формирования сигналов управления электромагнитным тормозом 3. Блок 15 управления содержит блок 16 (фиг.5) определения электромагнитной мощности генератора, блок 17 запоминания значения электромагнитной мощности генератора до приложения возмущения, блок 18 сравнения значения электромагнитной мощности генератора после приложения возмущения со значением электромагнитной мощности до приложения возмущения и блок 19 формирования управляющего сигнала на включение электромагнитного тормоза в случае, если величина сравнения превышает заданное значение. При этом выход блока 16 подключен к входу блока 17 и первому входу блока 19, а ко второму входу блока 19 подключен выход блока 17. Указанный выход блока 17 подключен также к одному входу блока 18, к другому входу которого подключен выход блока 16.
Система содержит также датчик 20 (фиг.4) напряжения на зажимах генератора и преобразователь 21 (фиг.5) напряжения, датчик 22 (фиг.4) тока статора генератора и преобразователь 23 (фиг.5) тока статора генератора. Блоки 20 и 22 выходами подключены к входам блоков 21, 23, соответственно, блока 15 управления.
К входу 24 блока 15 подключен датчик 1 скорости вращения ротора генератора через преобразователь 25 скорости вращения. К входу 26 блока 18 подключен блок 27, который запоминает значение скорости вращения ротора генератора в режиме до приложения возмущения. Для этого к входу 28 блока 27 подключен выход блока 25, а к входу 29 блока 27 подключен выход блока 30 сравнения. В блоке 15 управления сформирован канал защиты тормозного диска 4 от перегрева, для этого к входу 31 блока 18 подключен датчик температуры тормозного диска (не показан) через преобразователь 32 температуры.
Блок 15 управления соединен с системным регулятором 33 (фиг.4), который является регулятором верхнего уровня, и логика его работы, а также структура определяются требованиями к ЭЭС.
Система содержит преобразователь 34 величины тормозного момента и длительности тормозного момента, входом подключенный к выходу 35 блока 15 управления, а выходом 36 - к катушке 6 электромагнитного тормоза 3.
Система содержит также источник 37 (фиг.6) питания, подключенный к преобразователю 34.
Для создания тормозного момента на валу генерирующего агрегата может быть использован электромагнитный тормоз 3, причем для механического соединения электромагнитный тормоз 3 может быть размещен в одном из трех положений: либо со стороны генератора (фиг.6), либо со стороны первичного двигателя (фиг.7), либо между генератором и первичным двигателем (фиг.4).
Электромагнитный тормоз 3 содержит вал 8 (фиг.4), на котором размещен тормозной диск 4 из материала с большой удельной электрической проводимостью, и электромагнит, который создает магнитное поле в аксиальном направлении к диску. Электромагнитная система состоит из электромагнита (катушка с сердечником) (функции сердечника и магнитопровода совмещены) и тормозного диска.
Другой вариант магнитной системы - это установка катушек индуктивности с сердечниками по окружности в аксиальном направлении к тормозному диску (фиг.8). Количество катушек четное, и их полюса при обходе по окружности чередуются. В обоих вариантах тормозной диск имеет каналы для охлаждения, т.е. имеет конструкцию для создания принудительной циркуляции охлаждающей среды.
Величина тока в обмотке электромагнита регулируется блоком 15 автоматического управления (фиг.7). Питание обмотки электромагнита осуществляется от источника 37 питания через преобразователь 34 величины тормозного момента и длительности тормозного момента. Указанный преобразователь 34 представляет собой управляемый преобразователь напряжения (тока). В качестве источника 37 питания выступает система собственных нужд или системы оперативного тока электростанции (переменного или постоянного тока). Параметры, по изменению которых регулируется ток, - это скорость вращения вала ГА, напряжение на зажимах генератора и ток генератора. Кроме того, на блок 15 приходят сигналы управления от системного регулятора 33, который является более высокой ступенью управления. Сигнал управления поступает от блока 15 на преобразователь 34, который в свою очередь непосредственно регулирует ток в обмотке электромагнита.
На фиг.9 представлена схема объединенной системы улучшения динамической устойчивости и демпфирования электромеханических колебаний. Система содержит электромагнитный тормоз 3 и блок 15 управления. Датчик 38 температуры тормозного диска через преобразователь 32 температуры подключен к блоку 18 сравнения.
Блок 15 управления дополнительно содержит блок 39 суммирования, к входу 40 которого подключен блок 41 дифференцирования по времени, к входу 42 подключен блок 43 создания отклонения, к входу 44 подключен блок 45 дифференцирования по времени, к входу 46 подключен блок 47 создания отклонения, к входу 48 подключен блок 49 дифференцирования по времени. При этом вход блока 41 подключен к выходу блока 21, вход блока 43 подключен к выходу блока 23, который подключен также к входу блока 45, вход блока 47 подключен к выходу блока 25, который подключен также к входу блока 49.
Выход 50 блока 39 подключен к входу 51 блока 18.
На вход 52 блока 18 подается пороговое значение температуры диска.
Кроме этого, ЭМТ может выполняться заодно с генератором 10. В этом случае ЭМТ может устанавливаться внутри корпуса генератора (не показано). Возможен вариант выполнения источника питания 37 в виде генератора постоянного или переменного тока, размещенного на валу 8 электромагнитного тормоза 3.
Работа системы осуществляется следующим образом.
Электроэнергетическая система (ЭЭС) состоит из генерирующего, передающего и потребляющего электроэнергию (ЭЭ) оборудования. Генерирующее оборудование - это, в основном, синхронные турбо- и гидрогенераторы, передающее оборудование - это трансформаторы и линии электропередачи.
Состояние ЭЭС на заданный момент или отрезок времени называется режимом. Режим определяется составом включенных элементов ЭЭС и их загрузкой. Значения напряжений, мощностей и токов элементов системы, а также частоты, определяющие процесс производства, передачи, распределения и потребления электроэнергии, называются параметрами режима ЭЭС.
В процессе работы ЭЭС возникают различного рода возмущения режима, вызываемые короткими замыканиями, разрывами в сети, коммутацией большой нагрузки, неправильной работой устройств релейной защиты и автоматики и т.д. Из-за небаланса механического и электромагнитного моментов на валу генерирующего агрегата возникают качания его ротора. Ротор генератора качается относительно магнитного поля статора, при этом изменяются параметры режима, в частности напряжения, что приводит к нестабильным режимам электропотребления и является причиной раскачивания других генерирующих агрегатов ЭЭС и узлов нагрузки. Качания бывают различной амплитуды и могут приводить к нарушению синхронной работы генератора и последующему асинхронному ходу, что является крайне нежелательным режимом энергосистемы. Кроме того, в современных автоматически регулируемых ЭЭС возникают низкочастотные межсистемные колебания.
Движение ротора ГА описывается уравнением

где ω - угловая скорость вращения ротора генератора (или ГА);  - угловая скорость вращения ротора генератора в установившемся режиме, как правило
- угловая скорость вращения ротора генератора в установившемся режиме, как правило 
 - номинальная угловая скорость вращения генератора;
- номинальная угловая скорость вращения генератора;  - крутящий момент первичного двигателя;
- крутящий момент первичного двигателя;  - электромагнитный момент генератора (момент первичного двигателя и генератора в уравнении фигурируют в относительных единицах и численно равны мощности первичного двигателя и электромагнитной мощности генератора, соответственно).
- электромагнитный момент генератора (момент первичного двигателя и генератора в уравнении фигурируют в относительных единицах и численно равны мощности первичного двигателя и электромагнитной мощности генератора, соответственно).
При работе электростанции турбина создает ускоряющий момент  на валу, генератор - тормозящий
на валу, генератор - тормозящий  . В нормальном режиме выработки электроэнергии моменты, создаваемые первичным двигателем и генератором, равны по модулю и противоположны по направлению. Таким образом, в нормальном режиме скорость вала ГА не изменяется во времени
. В нормальном режиме выработки электроэнергии моменты, создаваемые первичным двигателем и генератором, равны по модулю и противоположны по направлению. Таким образом, в нормальном режиме скорость вала ГА не изменяется во времени 
Положение ротора генератора характеризуется углом  , который связан с угловой скоростью
, который связан с угловой скоростью

В установившемся режиме генератор работает с некоторым значением угла  , которому соответствует определенная выдаваемая мощность при рабочем напряжении на зажимах генератора. Вообще, можно говорить о сохранении динамической устойчивости, если после снятия возмущения ротор генератора, достигнув некоторого значения угла, меньшего 180°, возвращается к значению угла в доаварийном режиме, если не произошло изменения мощности первичного двигателя, конфигурации и режима работы сети ЭЭС, или же к другому значению, которое определяется условиями установившегося послеаварийного режима.
, которому соответствует определенная выдаваемая мощность при рабочем напряжении на зажимах генератора. Вообще, можно говорить о сохранении динамической устойчивости, если после снятия возмущения ротор генератора, достигнув некоторого значения угла, меньшего 180°, возвращается к значению угла в доаварийном режиме, если не произошло изменения мощности первичного двигателя, конфигурации и режима работы сети ЭЭС, или же к другому значению, которое определяется условиями установившегося послеаварийного режима.
В случае приложения возмущения к ЭЭС изменяется  и возникает небаланс моментов на валу генератора, что приводит, как правило, к возникновению ускорения и изменению скорости вращения ротора генератора, и соответственно, качаниям. А в некоторых случаях возникает асинхронный ход генератора.
и возникает небаланс моментов на валу генератора, что приводит, как правило, к возникновению ускорения и изменению скорости вращения ротора генератора, и соответственно, качаниям. А в некоторых случаях возникает асинхронный ход генератора.
Теперь, если к валу агрегата первичный двигатель-генератор присоединить электромагнитный тормоз, то появляется возможность независимо от параметров текущего режима ЭЭС влиять на баланс моментов на валу генерирующего агрегата. Поскольку ЭМТ создает только тормозящий момент, то использование устройства торможения требуется только при положительной разности скоростей  механического и электромагнитного моментов на валу генерирующего агрегата
механического и электромагнитного моментов на валу генерирующего агрегата 

где  - момент, создаваемый ЭМТ.
- момент, создаваемый ЭМТ.
Таким образом, при соответствующих параметрах ЭМТ и управлении  можно добиться сохранения синхронной работы генератора при больших возмущениях, а также демпфирования электромеханических колебаний генерирующего агрегата и демпфирования межсистемных колебаний.
можно добиться сохранения синхронной работы генератора при больших возмущениях, а также демпфирования электромеханических колебаний генерирующего агрегата и демпфирования межсистемных колебаний.
При пропускании тока по обмотке электромагнита создается магнитное поле, которое замыкается через сердечник катушки, магнитопровод и тело вращающегося тормозного диска, в котором наводятся токи, взаимодействующие с магнитным полем электромагнита. В результате взаимодействия токов с магнитным полем возникает тормозной момент. Значение тормозного момента можно регулировать, изменяя величину тока в обмотках электромагнита магнитной системы ЭМТ.
При приложении возмущения к системе вал генерирующего агрегата (ГА) начинает ускоряться. Сигнал скорости вращения ротора ГА с датчика 1 подается в блок 15 (фиг.7) и оценивается изменение скорости вращения ротора генератора ГА. При выполнении условий: ускорения вала ГА и падения напряжения на шинах генератора относительно напряжения предшествующего установившегося режима (или снижение электрической мощности генератора) в системе формируется сигнал на увеличение тока в обмотке ЭМТ и передается в управляемый преобразователь напряжения (тока), который увеличивает напряжение на обмотке электромагнита, и создается тормозящий момент. Как только скорость вращения вала становится равной скорости электромагнитного поля статора и измеряемая мощность генератора становится равной значению мощности до приложения возмущения, ЭМТ выключается (ток его обмоток доводится до нуля). Либо, как только скорость вращения вала генерирующего агрегата становится равной скорости вращения электромагнитного поля статора, и измеряемая электромагнитная мощность генератора становится равной механической мощности турбины, ЭМТ выключается. Далее начинаются синхронные качания и, при правильных настройках автоматических регуляторов, ГА переходит в установившийся режим работы.
Для демпфирования электромеханических колебаний электроэнергетической системы на блок 41 (фиг.9) дифференцирования по времени подается сигнал с выхода блока 21, на блок 43 создания отклонения подается сигнал с выхода блока 23, на блок 45 дифференцирования по времени подается сигнал с выхода блока 23, на блок 47 создания отклонения подается сигнал с выхода блока 25, на блок 49 дифференцирования по времени подается сигнал с выхода блока 25.
Так как ЭМТ создает момент только одного знака (тормозящий), но изменяемой величины, то для улучшения условий динамической устойчивости электрической системы он может включаться однократно или многократно в зависимости от конкретного режима ЭЭС. Так как величина тормозного момента регулируется в широких пределах, то с помощью ЭМТ возможно демпфировать синхронные качания генераторов.
ЭМТ может применяться для аварийного снижения скорости при различных повреждениях генерирующего агрегата (падение давления масла в контуре смазки, разрушение первичного двигателя (турбины) или генератора).
ЭМТ может применяться для демпфирования электромеханических колебаний синхронного компенсатора. В этом случае синхронный компенсатор и ЭМТ конструктивно объединяются в одном корпусе.
Способ улучшения динамической устойчивости электроэнергетической системы осуществляют следующим образом.
Уменьшают скорость вращения ротора генератора путем механического торможения указанного ротора генератора, для чего осуществляют механическое соединение электромагнитного тормоза, размещенного соосно с валом генератора и валом первичного двигателя, с ротором генератора и ротором первичного двигателя посредством муфт.
Непрерывно измеряют напряжение UГ на зажимах генератора и ток IГ статора генератора, по которым определяют электромагнитную мощность генератора.
Сравнивают полученное значение электромагнитной мощности генератора со значением электромагнитной мощности до приложения возмущения.
В случае, если величина сравнения превышает заданное значение, формируют управляющий сигнал на включение электромагнитного тормоза, при этом
величину тормозного момента определяют по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения, а
длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения.
Отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой электромагнитной мощности генератора и мощности до приложения возмущения.
Либо отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора генерирующего агрегата и его скорости до приложения возмущения и при равенстве измеряемой электромагнитной мощности генератора и механической мощности турбины.
При осуществлении механического соединения электромагнитный тормоз размещают либо со стороны генератора, либо со стороны первичного двигателя, либо между генератором и первичным двигателем.
Согласно второму варианту воплощения предложенного способа улучшения динамической устойчивости электроэнергетической системы:
непрерывно измеряют напряжение на зажимах генератора,
сравнивают полученное значение напряжения на зажимах генератора с заданным значением напряжения, которое находится в пределах от 65% до 95% от номинального значения напряжения,
в случае, если величина сравнения ниже заданного значения, формируют управляющий сигнал на включение электромагнитного тормоза, при этом
дополнительно непрерывно измеряют ток статора генератора,
определяют электромагнитную мощность генератора по измеренным значениям напряжения и тока,
сравнивают полученное значение электромагнитной мощности генератора со значением электромагнитной мощности до приложения возмущения,
определяют величину тормозного момента по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения.
При этом длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения,
отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой мощности и мощности до приложения возмущения.
Либо отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора генерирующего агрегата и его скорости до приложения возмущения и при равенстве измеряемой электромагнитной мощности генератора и механической мощности турбины.
Согласно третьему варианту воплощения предложенного способа улучшения динамической устойчивости электроэнергетической системы:
детектируют наличие отклонения скорости вращения ротора генератора как результат приложения возмущения к системе и определяют разность скоростей вращения между измеренной скоростью и скоростью вращения до приложения возмущения,
сравнивают полученную разность с заданным значением.
В случае, если величина сравнения выше заданного значения, формируют управляющий сигнал на включение электромагнитного тормоза, при этом
непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора,
определяют величину тормозного момента по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения.
Длительность приложения тормозного момента определяют по изменению скорости вращения ротора генератора, для чего определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения,
отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой мощности и мощности до приложения возмущения.
Согласно изобретению дополнительно к указанным трем вариантам реализации заявленного способа возможно осуществить демпфирование электромеханических колебаний электроэнергетической системы.
Осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока, напряжения и тока статора,
непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора,
определяют производную от напряжения на зажимах генератора по времени,
определяют производную от тока статора генератора по времени,
определяют отклонение измеряемой скорости вращения ротора от скорости вращения в установившемся режиме,
определяют производную от измеряемой скорости вращения ротора по времени.
Затем суммируют полученные сигналы производных напряжения, тока, отклонения скорости вращения ротора генератора и величины отклонения скорости вращения и получают управляющий электрический сигнал, который подают на преобразователь напряжения для демпфирования электромеханических колебаний.
Технический эффект заявленного изобретения заключается в непосредственном влиянии на баланс крутящих моментов на валу генерирующего агрегата. Устройство ЭМТ обладает малой постоянной времени, что позволяет регулировать баланс моментов практически безынерционно.
Преимуществами применения устройства электромагнитного тормоза для улучшения динамической устойчивости ЭЭС по сравнению с перечисленными выше способами и устройствами являются:
практически безынерцинное регулирование баланса моментов на валу генерирующего агрегата;
эффективность применения этого устройства не зависит от уровня напряжений, состояния и режима сети ЭЭС;
управление длительностью и величиной тормозящего момента;
возможность быстрого снижения скорости и остановки в случае аварийной ситуации на ГА;
демпфирование электромеханических колебаний ротора генератора осуществляется непосредственно путем управления балансом мощности на валу ГА, и процесс демпфирования не влияет на электрический режим ЭЭС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕХОДНЫМИ ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРОЦЕССАМИ В ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМАХ | 2014 |
|
RU2576652C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ СИНХРОНИЗИРУЮЩЕЙ МОЩНОСТИ СИНХРОННОЙ МАШИНЫ | 2014 |
|
RU2564539C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2015 |
|
RU2592641C1 |
| Система определения инерционной постоянной синхронной машины | 2017 |
|
RU2663826C1 |
| Автономная электроэнергетическая установка с синхронными дизель-генераторами | 1982 |
|
SU1128364A1 |
| Электроэнергетическая установка | 1977 |
|
SU721878A1 |
| Судовая электроэнергетическая система переменного напряжения с турбогенераторами двух различных частот | 2017 |
|
RU2661902C1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |
| Электроэнергетическая установка | 1977 |
|
SU721889A1 |
| СПОСОБ УПРАВЛЕНИЯ ГЕНЕРИРУЮЩЕЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2005 |
|
RU2295191C1 |







Изобретение относится к области электротехники и может быть использовано для улучшения динамической устойчивости электроэнергетических систем, а также для демпфирования электромеханических колебаний ротора генератора. В способе улучшения динамической устойчивости и демпфирования колебаний осуществляют мониторинг скорости вращения ротора синхронного генератора переменного тока и снижают скорость вращения ротора синхронного генератора после приложения возмущения к системе до скорости вращения магнитного поля статора путем механического торможения указанного ротора генератора. Электромагнитный тормоз механически соединяют с ротором генератора и ротором первичного двигателя посредством муфт, непрерывно измеряют напряжение на зажимах генератора и ток статора генератора, по которым определяют электромагнитную мощность генератора, которую сравнивают со значением электромагнитной мощности до приложения возмущения. При превышении результата сравнения мощностей заданного значения формируют управляющий сигнал на включение электромагнитного тормоза. Определяют величину тормозного момента по разности значений измеренной электромагнитной мощности и электромагнитной мощности до приложения возмущения, а длительность приложения тормозного момента - по изменению скорости вращения ротора генератора. Для этого определяют скорость вращения ротора генератора после приложения возмущения и сравнивают ее со значением до приложения возмущения. Отключают электромагнитный тормоз при достижении равенства текущей скорости вращения ротора и скорости ротора в режиме до возмущения и при равенстве измеряемой мощности и мощности до приложения возмущения. Рассмотрены также система для улучшения динамической устойчивости электроэнергетической системы и способ и система демпфирования электромеханических колебаний электроэнергетической системы. 7 н. и 4 з.п. ф-лы, 9 ил.
| СПОСОБ ПОВЫШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ СИНХРОННЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2005 |
|
RU2295817C2 |
| АДАПТИВНЫЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1993 |
|
RU2044401C1 |
| Способ противоаварийного управления гидроэлектростанцией | 1990 |
|
SU1771032A1 |
| GB 1484279 A, 01.09.1977 | |||
| US 20050286179 A1, 29.12.2005 | |||
| Барабан хлопкоуборочного аппарата | 1980 |
|
SU967365A2 |

