Область техники
Изобретение относится к классу способов управления электрическими генераторами, с целью получения требуемого значения выходных параметров, в частности, управления возбуждением генератора, с целью ослабления вредных влияний перегрузок или переходных процессов, например при внезапном подключении, снятии или изменении нагрузки, и может быть использовано при создании оборудования для управления синхронными генераторами на предприятиях, вырабатывающих электрическую энергию.
Уровень техники
Одной из основных причин снижения стабильности поставки и качества выработки электроэнергии в локальном и глобальном масштабе являются электромеханические переходные процессы, возникающие в электрических генераторах вследствие локальных возмущений в энергосистемах.
Величина и длительность указанных процессов в значительной степени определяются точностью настройки параметров регуляторов возбуждения. При изменении электрических характеристик энергосистем указанные параметры утрачивают оптимальность, ухудшаются характеристики переходных процессов, сужается диапазон устойчивости регулирования возбуждения.
В существующих способах управления возбуждением синхронных генераторов установка параметров регулятора возбуждения производится исходя из состояния энергосистемы на момент настройки. При этом не предусматривается адаптация всех параметров регуляторов, отвечающих за характеристики переходных процессов, к электрическим характеристикам энергосистем в процессе их функционирования.
Известен способ управления генерирующей электроэнергетической установкой [Патент РФ №2295191, МПК H02P 9/04 от 13.09.2005 г.], содержащей первичный двигатель с регулятором скорости вращения, источник переменного тока и преобразователь частоты, который заключается в том, что измеряют значения выходного напряжения и выходного тока установки, регулируют модуль выходного векторного параметра преобразователя в соответствии с заданными значениями выходного напряжения и максимально допустимого тока установки, определяют активную мощность, вырабатываемую установкой, моделируют нагруженный этой мощностью генератор с турбиной, снабженной регулятором скорости вращения, определяют изменение угла поворота ротора моделируемого генератора, вызванное текущими отклонениями его скорости вращения от номинальной, и корректируют в соответствии с этим изменением фазу выходного векторного параметра преобразователя.
Недостаток указанного способа заключается в том, что последний не обеспечивает близкие к оптимальным характеристики переходных процессов вследствие того, что в нем не предусмотрено регулирование возбуждения по производной тока обмотки статора, по производной напряжения генератора и по отклонению и производной частоты напряжения к параметрам энергосистемы; не раскрыт способ оптимизации параметров регулирования с учетом конфигурации энергосети, в которой функционирует электроэнергетическая установка.
Известен, выбранный в качестве прототипа, способ автоматического регулирования возбуждения синхронного генератора [Патент РФ №2011264, МПК H02J 3/24, H02P 9/14, от 26.06.1991], путем установления коэффициентов усиления по отклонениям и производным напряжения и частоты при малых качаниях генератора, увеличения коэффициента усиления по первой производной частоты при больших качаниях, в котором для повышения качества регулирования возбуждения синхронного генератора, ротор которого питается от вентильного преобразователя, измеряют величины пульсаций напряжения и тока ротора, определяют по их соотношению инерционность обмотки ротора и изменяют коэффициент усиления по первой производной частоты прямо пропорционально изменению инерционности обмотки ротора.
Недостаток способа-прототипа заключается в том, что последний обеспечивает оптимальное демпфирование только низкочастотных электромагнитных переходных процессов благодаря тому, что в последнем не предусмотрено регулирование возбуждения по производной тока обмотки возбуждения, а также отсутствует адаптация параметров регулирования по отклонению и производной напряжения генератора и по отклонению частоты к параметрам энергосистемы.
Сущность изобретения
Решаемой технической задачей является минимизация величины и длительности электромеханических переходных процессов, происходящих в энергосистемах, путем непрерывной автоматической адаптации параметров регулирования возбуждения синхронного генератора (коэффициентов усиления звеньев, входящих в регулятор) к электрическим характеристикам энергосистемы при изменении ее конфигурации.
Для реализации поставленной задачи в способе управления возбуждением синхронного электрического генератора, устанавливают коэффициенты усиления по производной тока обмотки возбуждения, по отклонениям и производным напряжения обмотки статора и частоты синхронного электрического генератора, измеряют ток обмотки возбуждения, напряжение обмотки статора и частоту и осуществляют регулирование возбуждения по производной тока обмотки возбуждения, по отклонениям и производным напряжения обмотки статора и частоты синхронного электрического генератора, во время переходного процесса формируют пары обучающих векторов: выходные, состоящие из дискретных отсчетов сигналов: реактивной составляющей тока статора, тока обмотки возбуждения и активной мощности генератора, и соответствующие им входные, состоящие из дискретных отсчетов сигналов: напряжения обмотки статора, управления возбуждением и частоты генератора, а также дискретных отсчетов указанных сигналов и соответствующих им сигналов выходного вектора, задержанных на один период дискретизации, дополняют парами указанных векторов сформированное ранее обучающее множество, исключают из обучающего множества пары векторов, включенные в него N переходных процессов назад, путем последовательного предъявления пар векторов из обучающего множества, обучают трехслойную нейронную сеть до достижения минимума среднеквадратической ошибки обучения, по весовым коэффициентам обученной нейронной сети при помощи заранее сформированной многомерной таблицы определяют коэффициенты усиления по отклонениям и производным напряжения и частоты и коэффициент усиления по производной тока обмотки возбуждения генератора, указанные коэффициенты усиления усредняют по N переходным процессам и устанавливают в качестве параметров регулирования, где N - глубина усреднения параметров регулирования.
Эта совокупность признаков позволяет решать задачу изобретения.
Изобретение поясняется чертежом, где иллюстрируется описываемый ниже пример осуществления предлагаемого способа.
В системах адаптивного автоматического управления процесс адаптации, как правило, осуществляется за счет оценки состояния и параметров управляемого объекта и оптимизации параметров регулирования, обеспечивающих переходные процессы, близкие к оптимальным. В энергетических системах параметры электромеханических переходных процессов определяются текущими параметрами электрического генератора и сопряженной с ним энергосистемы. Большинство составляющих указанных параметров прямой оценке не подлежат, что существенно затрудняет осуществление процесса адаптации параметров регулирования возбуждения синхронного генератора к параметрам энергосистемы.
Для реализации указанного процесса в предлагаемом способе реализуется непрямое адаптивное регулирование возбуждения синхронного генератора, основанное на методе идентификации управляемого объекта (энергосистемы). При таком подходе прямая оценка параметров объекта управления заменяется оценкой параметров его идентификатора, оптимизированных по косвенным признакам - сигналам переходных процессов.
В качестве идентификатора целесообразно использование многослойной нейронной сети, обученной по критерию минимума среднеквадратической ошибки отклонения выходных сигналов от сигналов идентифицируемого объекта и обладающей рядом преимуществ: при достаточной структуре возможностью производить идентификацию объекта управления в условиях априорной неопределенности его параметров, регулярностью структуры, а также инвариантностью алгоритма обучения к количеству нейронов в слоях, что важно при практическом осуществлении способа.
Преимущества предлагаемого способа заключаются в том, что последний за счет адаптации параметров регулирования по отклонению и производной напряжения, по отклонению и производной частоты и по производной тока обмотки возбуждения генератора к параметрам энергосистемы обеспечивает характеристики переходных процессов (величину и длительность), близкие к оптимальным; в предлагаемом способе в отличие от прототипов реализовано непрямое адаптивное управление объектом (энергосистемой), т.е. контуры адаптации не производят воздействия на сигнал управления, а только на параметры регулирования, что в целом является более надежным.
На примере устройства, реализующего способ (фиг.1), синхронный электрический генератор 1 функционирует совместно с энергосетью 2 и управляется регулятором возбуждения 3.
Последний состоит из следующих блоков: регулятор по отклонению и производной напряжения обмотки статора 4, регулятор по отклонению и производной частоты генератора 5, регулятор по производной тока обмотки возбуждения генератора 6, сумматора 7 и вырабатывает сигнал управления возбуждением генератора Uf в соответствии с формулой:
ΔUf=kU·ΔUs+kU1·Us′+kf·Δf+kf1·f′+ki1·if′,
где kU, kU1 - соответственно коэффициент усиления регулятора по отклонению и производной напряжения обмотки статора;
kf, kf1 - соответственно коэффициент усиления регулятора по отклонению и производной частоты генератора;
ki1 - коэффициент усиления регулятора по производной тока обмотки возбуждения генератора;
ΔUf - приращение напряжения возбуждения генератора;
ΔUs, Us′ - соответственно приращение и производная напряжения обмотки статора генератора;
Δf, f′ - приращение и производная частоты генератора;
if′- производная тока обмотки возбуждения генератора.
Изначально параметры регулирования - коэффициенты kU, kU1, kf, kf1, ki1 - задаются приближенно, на основе опытных данных, накопленных ранее.
Сигналы: напряжения обмотки статора Us, частоты генератора f и тока обмотки возбуждения if формируются соответствующими измерителями 8-10, представленными на фиг.1.
Сигналы приращения и производной напряжения обмотки статора, а также частоты генератора определяются как:

где US0 и f0 - соответственно уставки по напряжению и частоте генератора.
На фиг.1 присутствуют также измерители реактивного тока обмотки статора Ir 11 и активной мощности генератора Р-12.
Измеритель реактивного тока обмотки статора может, например, функционировать в соответствии с формулой:
где Is - ток обмотки статора генератора, cosφ - коэффициент активной мощности генератора, определяемый как 
Измеритель активной мощности генератора может, например, функционировать в соответствии с формулой:
Р=Us·Is.
Сигналы: управления возбуждением Uf, напряжения обмотки статора Us, частоты генератора f, тока обмотки возбуждения if, реактивного тока обмотки статора Ir, активной мощности генератора Р поступают на блок аналого-цифрового преобразования (АЦП) 13, запускаемого во время переходного процесса по сигналу одноименного регистратора 14, в результате чего дискретизируются по времени и величине и преобразуются в величины Uf[n], Us[n], f[n], if[n], Ir[n], P[n] соответственно, где n - индекс дискретных отсчетов сигналов.
Регистрация переходного процесса производится по сигналам: напряжения обмотки статора Us, частоты генератора f, реактивного тока обмотки статора Ir посредством, например, вычисления энергии указанных сигналов на интервале средней длительности переходного процесса, сравнения указанных энергий с пороговыми величинами и формирования сигналов-признаков превышения порогов и применения к указанным признакам операции логического «ИЛИ».
Указанные величины поступают в в блок 15, где претерпевают задержку на один такт (период дискретизации Т) и преобразуются в величины Uf[n-1], Us[n-1], f[n-1], if[n-1], Ir[n-1], Р[n-1] соответственно.
С выхода блока АЦП величины Uf[n], Us[n], f[n] поступают на вход блока 16, на другие входы которого также поступают претерпевшие задержку на один такт в блоке цифровых линий задержки 15 величины: напряжения возбуждения Uf[n-1], напряжения статора Us[n-1], частоты f[n-1], тока возбуждения if[n-1], реактивного тока Ir[n-1] и активной мощности Р[n-1], в котором формируется входной вектор Xn для обучения нейросети. Величины if[n], Ir[n], P[n] поступают на вход блока 17, предназначенного для формирования выходного вектора Yn для обучения нейросети.
Пары векторов (Xn, Yn) поступают в формирователь обучающего множества 18, который осуществляет операцию их записи в устройство хранения данных обучающего множества 19. При этом во избежание переполнения памяти указанного устройства из последнего исключаются пары векторов (Xn-N, Yn-N), записанные N переходных процессов назад. Здесь N обозначена глубина усреднения параметров регулирования. Таким образом, при возникновении очередного переходного процесса в энергосети производится обновление обучающего множества нейросети в устройстве хранения данных 19 с учетом вновь поступивших обучающих векторов (Xn, Yn).
Процессорное устройство 20 производит обучение многослойной нейронной сети 21 типа персептрон, путем последовательной итеративной подачи на нее входных векторов Xi из обучающего множества, по критерию минимума среднего квадрата отклонения отклика нейросети F(Xi) на вектора Xi от соответствующих выходных обучающих векторов Yi и коррекции весовых коэффициентов нейросети, например, посредством известного алгоритма обратного распространения, описанного, например в (Хайкин С. Нейронные сети: полный курс.: пер. с англ. - М.: ООО «И.Д. Вильямс», 2006. стр.125).
Многослойная нейронная сеть 21 предназначена для идентификации энергосистемы, состоящей из синхронного генератора 1 и энергосети 2. Параметры энергосети, претерпевающие медленные флуктуации в результате ввода новых потребителей и мощностей, определяют характеристики переходных процессов сигналов электрического генератора: форму, величину и длительность. При возникновении очередного переходного процесса производится регистрация сигналов генератора, обновление обучающего множества нейросети и ее обучение по обновленному множеству.
Вектор весовых коэффициентов нейросети Wn, оптимизируемых при ее обучении по критерию минимума среднего квадрата ошибки, содержит информацию о текущих параметрах энергосети. Указанному вектору Wn, соответствует набор оптимальных параметров (kU, kU1, kf, kf1, ki1), который позволяет производить регулирование возбуждения генератора с обеспечением минимальной величины и длительности переходных процессов.
Оптимальные параметры регулирования могут быть получены, например, путем имитационного математического моделирования энергосистемы для каждого набора коэффициентов нейросети Wn с учетом разрядности их представления, и записаны в таблицу 22, реализованную, например в виде постоянного запоминающего устройства.
Параметры регулирования, извлекаемые из таблицы 22, поступают на схему скользящего усреднения 23, функционирующую по алгоритму:
Si[n]=Si[n-1]+(Ki[n]-Ki[n-N])/N,
где Si[n] - усредненная величина, N - глубина усреднения i-го параметра Ki[n] из набора (kU, kU1, kf, kf1, ki1) для вектора коэффициентов нейросети Wn, подаваемого на n-ом шаге. Усреднение по N параметрам необходимо для подавления флуктуации параметров регулирования в контуре адаптации. Усреднение производится для каждого параметра регулирования. Величина N определяется экспериментально и должна быть не менее среднего периода флуктуации параметров энергосети.
С выхода схемы 23 полученные усредненные величины коэффициентов усиления регулятора по отклонению и производной напряжения обмотки статора (<kU>, <kU1>), коэффициентов усиления регулятора по отклонению и производной частоты (<kf>, <kf1>), коэффициента усиления регулятора по производной тока обмотки возбуждения генератора поступают в регулятор возбуждения 3 и устанавливаются в качестве соответствующих параметров регулирования.
Таким образом, в процессе функционирования энергосистемы за счет устанавливаются параметры регулирования, обеспечивающие характеристики переходных процессов, близкие к оптимальным.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465716C1 |
| СПОСОБ НАСТРОЙКИ ПАРАМЕТРОВ РЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498495C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| Способ автоматического регулирования возбуждения синхронного генератора | 1980 |
|
SU892640A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ АСИНХРОННОГО И СИНХРОННОГО ГЕНЕРАТОРОВ | 1991 |
|
RU2012977C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННЫХ ГЕНЕРАТОРОВ | 1971 |
|
SU301805A1 |
| Устройство для моделирования энергосистемы | 1981 |
|
SU963004A1 |
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1990 |
|
SU1741223A2 |
| СПОСОБ ДИАГНОСТИКИ ВИТКОВЫХ ЗАМЫКАНИЙ В ОБМОТКЕ РОТОРА СИНХРОННОГО ГЕНЕРАТОРА | 2016 |
|
RU2629708C1 |
Изобретение относится к области электротехники и может быть использовано для управления синхронными генераторами на предприятиях, вырабатывающих электрическую энергию. Технический результат - уменьшение величины и длительности переходных процессов, повышение скорости их гашения. B способе управления возбуждением генератора устанавливают коэффициенты усиления по производной тока обмотки возбуждения, по отклонениям и производным напряжения обмотки статора и частоты генератора, измеряют и осуществляют регулирование возбуждения по отклонениям указанных величин и их производным. Во время переходного процесса формируют пары обучающих векторов, состоящие из дискретных отсчетов сигналов электрического генератора и дискретных отсчетов этих сигналов, задержанных на один период дискретизации, дополняют парами указанных векторов сформированное ранее обучающее множество, исключают из нее пары векторов, включенные в нее N переходных процессов назад. Последовательным предъявлением пар векторов из обучающего множества обучают трехслойную нейронную сеть до достижения минимума среднеквадратической ошибки обучения: по весовым коэффициентам обученной нейронной сети при помощи заранее сформированной многомерной таблицы определяют коэффициенты усиления по отклонениям и производным напряжения и частоты и коэффициент усиления по производной тока обмотки возбуждения генератора, усредняют их по N переходным процессам и устанавливают в качестве параметров регулирования, где N - глубина усреднения параметров регулирования. 1 ил.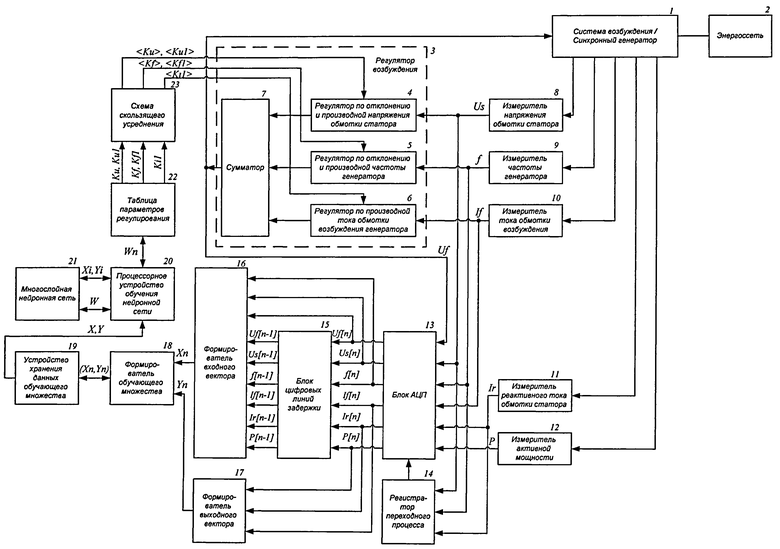
Способ управления возбуждением синхронного электрического генератора путем установления коэффициентов усиления по отклонениям и производным напряжения обмотки статора и частоты генератора, отличающийся тем, что дополнительно устанавливают коэффициент усиления по производной тока обмотки возбуждения и производят измерение и регулирование по производной указанной величины, во время переходного процесса формируют пары обучающих векторов: выходные, состоящие из дискретных отсчетов сигналов: реактивной составляющей тока статора, тока обмотки возбуждения и активной мощности генератора, и соответствующие им входные, состоящие из дискретных отсчетов сигналов: напряжения обмотки статора, управления возбуждением и частоты генератора, а также дискретных отсчетов указанных сигналов и соответствующих им сигналов выходного вектора, задержанных на один период дискретизации, дополняют парами указанных векторов сформированное ранее обучающее множество, исключают из обучающего множества пары векторов, включенные в него N переходных процессов назад, путем последовательного предъявления пар векторов из обучающего множества, обучают трехслойную нейронную сеть до достижения минимума среднеквадратической ошибки обучения, по весовым коэффициентам обученной нейронной сети при помощи заранее сформированной многомерной таблицы определяют коэффициенты усиления по отклонениям и производным напряжения и частоты и коэффициент усиления по производной тока обмотки возбуждения генератора, указанные коэффициенты усиления усредняют по N переходным процессам и устанавливают в качестве параметров регулирования, где N - глубина усреднения параметров регулирования.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1991 |
|
RU2011264C1 |
| СПОСОБ УПРАВЛЕНИЯ ГЕНЕРИРУЮЩЕЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2005 |
|
RU2295191C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ТУРБОГЕНЕРАТОРА ДЛЯ ПРЕДУПРЕЖДЕНИЯ ПЕРЕГРУЗКИ ЛИНИЙ СВЯЗИ ТУРБОГЕНЕРАТОРА С ЭНЕРГОСИСТЕМОЙ И ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАБОТЫ | 1991 |
|
RU2016492C1 |
| СПОСОБ АДАПТИВНОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1990 |
|
RU2014724C1 |
| Автономная электроэнергетическая установка | 1987 |
|
SU1467731A1 |
| US 20080143113 A1, 19.06.2008 | |||
| EP 1748549 A2, 31.01.2007 | |||
| WO 2011092193 A3, 05.12.2012. | |||

