Изобретение относится к вибрационной технике, а именно к электромеханическим центробежным инерционным вибраторам (вибровозбудителям), используемым в строительстве, в производстве строительных материалов и других отраслях промышленности.
Инерционные центробежные вибраторы с дебалансами просты, надежны, относительно недороги и широко используются для вибрационной обработки.
Условимся считать регулируемым вибратором устройство в целом, включая электродвигатель и преобразователь частоты, когда он имеется, а вибровозбудителем - часть вибратора с вращающимися дебалансами, непосредственно создающую колебания; электродвигатель, если дебалансы закреплены на его валу, можно конструктивно отнести к вибровозбудителю.
Центробежная вынуждающая (возмущающая) сила Fв=k·m·R·n2=k·Mст·n2, где k - коэффициент пропорциональности, зависящий от выбора единиц измерения; m - масса дебаланса; R - радиус центра тяжести дебаланса; n - частота вращения; Mст=m·R - статический момент дебаланса.
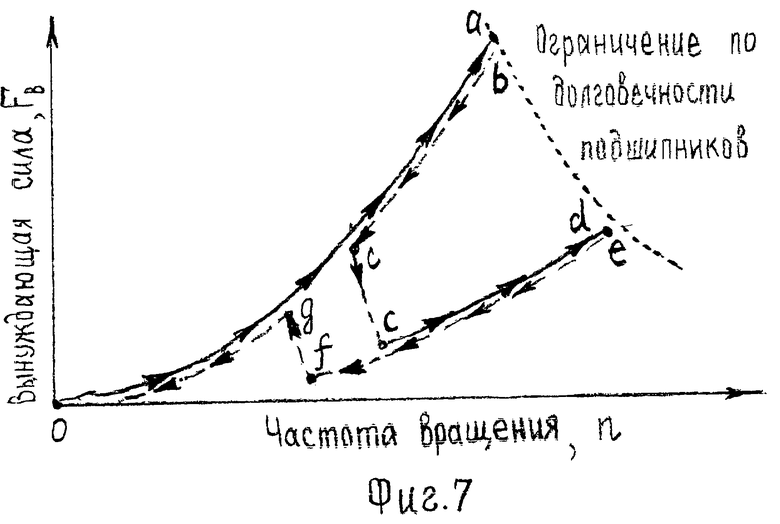
Для вибровозбудителя со сплошным дебалансом Mст=Const характеристика Fв(n)=k·m·R·n2 изображается параболой, максимальная частота вращения и вынуждающая сила ограничены сочетанием (nmax, Fв max) по условиям долговечности подшипников.
В последние десятилетия требования к вибраторам возросли; с точки зрения эффективности виброобработки идеальным можно было бы считать вибратор (вибровозбудитель) с плавной независимой регулировкой частоты вращения и вынуждающей силы (или статического момента) в требуемых технологических пределах, по оптимальной программе.
С появлением на рынке полупроводниковых преобразователей частоты регулировка скорости вращения не представляет сложности и соответствует уровню техники.
Известны отдельные частичные решения задачи регулирования статического момента, например некоторые вибраторы ярославского завода «Красный Маяк» и зарубежных фирм комплектуются составными дебалансами; в них величина статического момента задается предварительной перестановкой упоров (аналог).
К достоинству этого решения следует отнести практически прежние габариты дебалансов, что позволяет модернизировать существующие типы вибраторов и адаптировать их к работе с преобразователями частоты.
Недостатки - минимальные регулировочные возможности, т.к. работа происходит на одной характеристике Fв(n), кроме того, перестановка упоров требует остановки и частичной разборки вибратора, что увеличивает трудозатраты, снижает производительность.
Известен электромеханический регулируемый вибровозбудитель по JP 2311619, реферат (прототип), содержащий приводной вал с переменной частотой вращения, зафиксированный на валу (неподвижный) дебаланс, установленный эксцентрично относительно вала подвижный дебаланс, противодействующую пружину и перестраиваемые упоры.
В этом вибровозбудителе при достижении заданной частоты вращения эксцентрическая составляющая центробежной силы преодолевает усилие противодействия пружины и переводит подвижный дебаланс в рассогласованное положение, уменьшая тем самым величину статического момента. Настройка усилия срабатывания пружины производится путем предварительной перестановки упоров в отключенном состоянии.
Характеристика Fв(n) для такого вибровозбудителя состоит из двух смежных параболических участков Fв1(n) и Fв2(n):
где n - текущее значение частоты вращения;
nпер - частота вращения при переключении;
nmax - максимально допустимая частота вращения;
Mст1 - большой статический момент;
Mст2 - малый статический момент.
Работа на малой скорости n<nпер с малым Mст2 и на большой скорости n>nпер с большим Mст1 для прототипа принципиально невозможна. Первое обстоятельство, по-видимому, значения не имеет, второе обстоятельство является функциональным недостатком прототипа потому, что по технологическим причинам часто требуется форсированный режим с кратковременной перегрузкой подшипников, который в прототипе недостижим.
Основным конструктивным недостатком прототипа является наличие пружины:
- пружина является нестабильным и малонадежным звеном в условиях вибрационных знакопеременных нагрузок;
- повышение надежности пружины возможно за счет снижении в ней механических напряжений, но при этом увеличиваются размеры и металлоемкость конструкции;
- в дебалансном отсеке выпускаемых серийно вибраторов, например типа ИВ, нет свободного места для установки противодействующей пружины между дебалансами, и вариант с пружиной требует увеличения габаритов, что не позволяет модернизировать существующие вибраторы и не устраивает ряд потребителей, снижая тем самым конкурентоспособность.
Задача создания изобретения может быть разделена на две части: функциональную и конструкторскую.
Функционально заявляемый вибратор имеет расширенные, по сравнению с прототипом, возможности управления технологическим процессом, а именно обеспечивает возможность работы по выбору с любым из двух, большим или малым, значением статического момента, независимо от частоты вращения, и перевод подвижного дебаланса в процессе работы по команде оператора или программного устройства, в требуемый момент времени, т.е. гибкое управление.
Конструктивно задача решена в габаритах серийных вибраторов без увеличения их металлоемкости и без применения пружин, снижающих надежность, благодаря использованию сил инерции (динамического момента), возникающих вследствие резкого ускорения и торможения вала двигателя, т.е. в принципе, управление положением подвижного дебаланса осуществляется импульсами положительного и отрицательного углового ускорения вала.
Реализация принципа потребовала взаимной конструктивной адаптации звеньев вибратора для их скоординированной совместной работы; задачу удалось решить без больших переделок на базе серийных вибраторов, что создает благоприятные предпосылки для модернизации выпускаемых и находящихся в эксплуатации нерегулируемых вибраторов путем добавления преобразователей частоты и замены дебалансных узлов.
Сущность изобретения заключается в том, что для перевода подвижного дебаланса из положения с большим статическим моментом (согласованного) в положение с малым статическим моментом (рассогласованное) и обратно использованы силы инерции (динамический момент), возникающие вследствие резкого ускорения и торможения вала электродвигателя, т.е. управление переключением производится импульсами положительного и отрицательного углового ускорения вала.
Для получения импульсов углового ускорения вала приводной асинхронный электродвигатель запитан от регулируемого преобразователя частоты, выполненного с возможностью резкого изменения частоты и амплитуды выходного напряжения, управление преобразователем частоты осуществляется по команде оператора или программного устройства.
Цикл работы вибратора состоит из следующих фаз:
- «легкий» пуск, когда в движение приходит только зафиксированный дебаланс и, совершив более половины оборота, входит в контакт с подвижным дебалансом;
- фиксирование подвижного дебаланса в согласованном положении;
- работа с большим статическим моментом;
- перевод подвижного дебаланса в рассогласованное положение импульсом отрицательного ускорения;
- удержание его в этом состоянии;
- работа с малым статическим моментом;
- торможение импульсом отрицательного углового ускорения;
- перевод подвижного дебаланса в положение для «легкого» пуска;
- остановка.
Известно из уровня техники (см. пат. RU 2184623), что при вращении эксцентрик развивает устанавливающий момент Mуэ, который стремится установить центр тяжести эксцентрика в наиболее удаленное от оси вращения положение с радиусом Rmax.
Теоретический анализ, выполненный авторами, выявил некоторые особенности работы эксцентрикового механизма, которые, по мнению заявителя, не следуют из уровня техники:
- при наименьшем расстоянии центра тяжести эксцентрика от оси вращения О, равном Rmin, устанавливающий эксцентрический момент равен нулю;
- состояние эксцентрика при Rmin является неустойчивым, малейшее отклонение от него вызывает появление Mуэ, направленного на дальнейшее увеличение этого отклонения;
- при переходе центра тяжести через прямую, соединяющую ось эксцентрика Оэ и ось вращения вала О (нейтраль N-N′), момент Mуэ меняет знак; направление вращения вала принято за положительное, а противоположное - за отрицательное.
Выявленные особенности эксцентрика положены в основу управляемого фиксирующего узла, удерживающего подвижный дебаланс в совмещенном положении.
При пуске упор на закрепленном дебалансе входит в контакт с подвижным дебалансом с отрицательным углом рассогласования 5°...10°, отрицательный Mуэ прижимает подвижный дебланс к упору.
Под воздействием командного импульса отрицательного ускорения закрепленный дебаланс вместе с валом двигателя притормаживается, подвижный дебаланс по инерции переходит нейтраль N-N′, устанавливающий момент Mуэ меняет знак с отрицательного на положительный, и подвижный дебаланс устремляется к устойчивому состоянию с Rmax, достигает его; в этом положении происходит работа с малым значением Mст2 до следующего командного импульса на торможение, который переводит подвижный дебаланс в положение подготовки к «легкому» пуску, затем следует остановка двигателя.
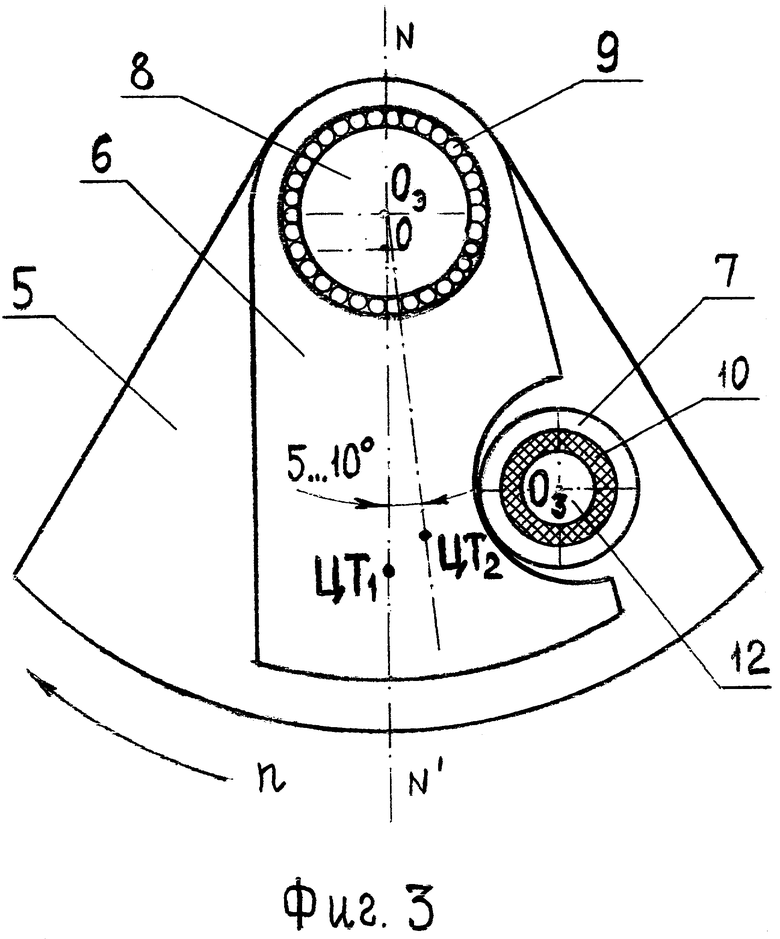
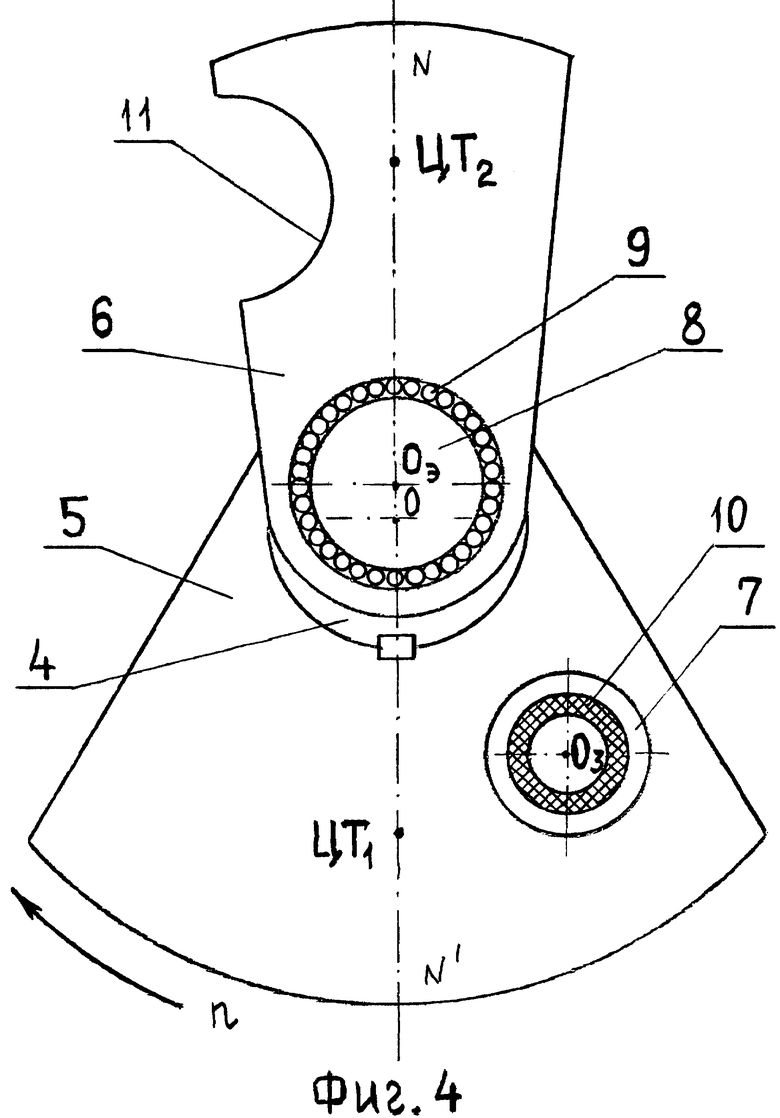
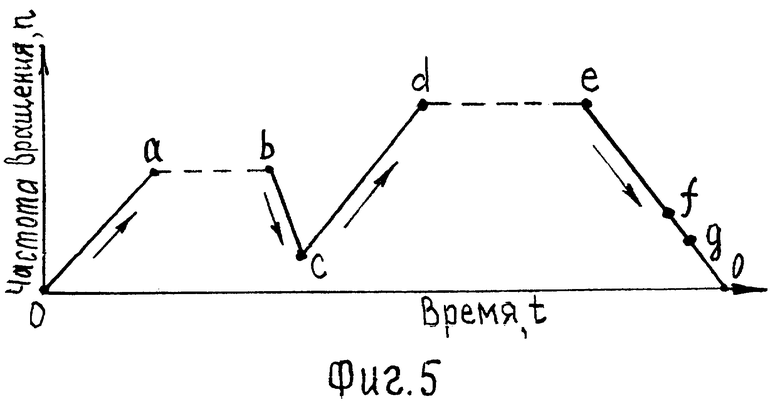
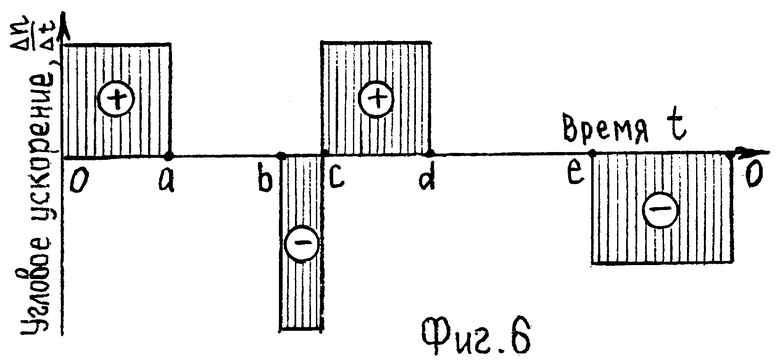
Сущность изобретения поясняется чертежами, где на фиг.1 приведена функционально-структурная схема вибратора, на фиг.2 показан продольный разрез вибровозбудителя, на фиг.3 - дебалансы находятся в согласованном положении (большой статический момент), на фиг.4 - дебалансы рассогласованы (малый статический момент), фиг.5 иллюстрирует изменение частоты вращения во времени, на фиг.6 показаны импульсы положительного и отрицательного ускорения за время цикла, на фиг.7 изображена циклограмма работы вибратора в координатах «частота вращения» - «вынуждающая сила».
Вибратор содержит программно-командное устройство 1, управляемый преобразователь частоты 2, электродвигатель 3 с валом 4, к которому посредством, например, шпоночного соединения присоединен зафиксированный дебаланс 5. Торец приводного вала 4 имеет эксцентриковый хвостовик 8, на котором установлен подвижный дебаланс 6, например, с помощью игольчатого подшипника 9. На плоской поверхности зафиксированного дебаланса 5 закреплен составной упор (7, 10, 12), состоящий из штыря (шпильки) 12, амортизирующего элемента 10 и наружной втулки 7.
Наружный радиус втулки 7 и глубина криволинейной выемки на боковой поверхности дебаланса 6, контактирующей с упором, выбраны таким образом (расстояние O3-ЦТ2), чтобы в начале совместного движения дебалансов устанавливался угол рассогласования 5°...10° против направления вращения.
Программно-командное устройство (ПКУ) 1 выдает команды в реальном времени на все фазы работы вибратора: пуск, разгон, работу с большим значением статического момента, перевод и работу подвижного дебаланса в положении малого статического момента, торможение с подготовкой последующего «легкого» пуска, остановку двигателя 3.
ПКУ может быть смонтировано в отдельном корпусе, либо быть совмещенным с преобразователем частоты 2.
Регулируемый преобразователь частоты (РПЧ) 2 запитан от сети переменного тока с напряжением U1 и частотой f1; преобразователь выполнен с возможностью резкого изменения выходной частоты (f2±Δf2) и напряжения (U2±ΔfU2) благодаря чему приводной асинхронный электродвигатель 3 создает управляющие импульсы положительного и отрицательного углового ускорения вала 4 в виде (n2±Δn), которые используются для перевода подвижного дебаланса из одного положении в другое.
Вибратор работает по следующему циклу. После включения РПЧ по команде оператора или ПКУ на выходе РПЧ появляется напряжение U2 с частотой f2, двигатель начинает вращение с положительным ускорением, (см. участок о-а на фиг.5, 6, 7). Зафиксированный дебаланс 5 упором 7 контактирует с выемкой на боковой поверхности подвижного дебаланса 6 и приводит его в совместное движение, при этом угол между прямой, проведенной через центр тяжести ЦТ2 подвижного дебаланса и ось Oэ эксцентрика, и прямой, проходящей через ось О приводного вала 4 и ось Oэ эксцентрика 8, составляет 5°...10° (угол рассогласования). Образующийся вследствие ускорения динамический момент прижимает подвижный дебаланс 6 к упору 7, по мере роста частоты вращения развивается центробежная сила, эксцентрическая составляющая которой, обусловленная углом рассогласования 5°...10° (устанавливающий эксцентрический момент), также прижимает подвижный дебаланс 6 к упору 7; после завершения разгона угловое ускорение равно нулю (точка а фиг.5, 6, 7), динамический момент исчезает, но устанавливающий эксцентрический момент продолжает удерживать дебалансы 5, 6 в совмещенном состоянии.
Следующая фаза (участок а-b фиг.5, 6, 7) - работа с большим значением статического момента в соответствии с технологической программой.
Для перевода подвижного дебаланса в рассогласованное положение (малого статического момента) по команде оператора или ПКУ резко снижается выходная частота преобразователя f2 и напряжение U2, импульс отрицательного углового ускорения замедляет вращение вала, подвижный дебаланс по инерции проходит нейтраль O-Оэ, устанавливающий эксцентрический момент меняет знак и продвигает подвижный дебаланс в устойчивое состояние при наибольшем удалении от оси вращения (b-с на фиг.5, 6, 7).
Далее следует разгон до требуемой частоты вращения (участок c-d), и фаза работы с малым статическим моментом (участок d-e).
Торможение двигателя (участок e-f-g-o) по команде ПКУ происходит за счет снижения выходного напряжения U2 и частоты f2 преобразователя 2.
Вследствие отрицательного ускорения частота вращения падет, в точке f динамический момент преодолевает устанавливающий эксцентрический момент, по инерции подвижный дебаланс 6 надвигается своей передней гранью на упор 7 со стороны, противоположной той, с которой начиналось движение, точка g. После остановки под действием силы тяжести оба дебаланса 5, 6 занимают крайнее нижнее положение для «легкого» пуска, точка o.
Следующий цикл начинается с того, что вращаться начинает только зафиксированный дебаланс (так называемый «легкий» пуск).
Совершив около 3/4 оборота зафиксированный дебаланс 5 своим упором входит в выемку на подвижном дебалансе, и далее происходит цикл, рассмотренный выше. Для смягчения ударных нагрузок упор 7 снабжен амортизирующим элементом 10.
Вибраторы предлагаемой конструкции изготовлены на Ярославском заводе «Красный Маяк», прошли испытания, малая серия находится в эксплуатации на одном из заводов ЖБИ; таким образом, промышленная применимость данного технического решения налицо.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 2017 |
|
RU2684682C1 |
| ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 2006 |
|
RU2324547C1 |
| ВИБРОВОЗБУДИТЕЛЬ | 2001 |
|
RU2200635C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ | 2005 |
|
RU2299770C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| УПРАВЛЯЕМЫЙ ДЕБАЛАНСНЫЙ УЗЕЛ | 2005 |
|
RU2310520C2 |
| ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 2006 |
|
RU2324548C1 |
| ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 2011 |
|
RU2464108C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528715C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523045C1 |

Изобретение относится к вибрационной технике, а именно к электромеханическим регулируемым вибраторам (вибровозбудителям), используемым в строительстве, в производстве строительных материалов и других отраслях промышленности. Техническим результатом изобретения является расширение возможности управления технологическим процессом и повышение надежности. Электромеханический регулируемый вибратор с двумя значениями статического момента и возможностью их переключения в процессе работы содержит приводной вал с переменной частотой вращения, зафиксированный на приводном валу дебаланс, установленный эксцентрично относительно вала подвижный дебаланс и ограничивающий упор. Питание вибратора осуществляется через преобразователь частоты. Угол между прямой, проведенной через ось вращения эксцентрика и геометрическую ось вала, и прямой, соединяющей ось вращения эксцентрика и центр тяжести подвижного дебаланса, составляет 5°...10° против направления вращения вала. Перевод в любое из двух значений статического момента по команде оператора или программного устройства происходит за счет сил инерции (динамического момента), возникающих вследствие резкого ускорения и торможения приводного вала. 2 з.п. ф-лы, 7 ил.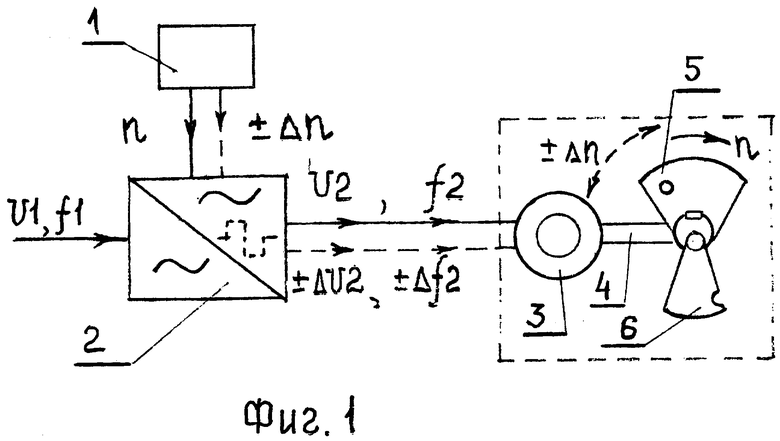
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ МАССОВОГО РАСХОДА ПОТОКА ГАЗОСОДЕРЖАЩЕЙ ЖИДКОСТИ | 2006 |
|
RU2311619C1 |
| Вибровозбудитель | 1987 |
|
SU1473865A1 |
| Самоходный виброкаток | 1987 |
|
SU1578244A1 |
| ВИБРОМОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ, ШПУНТА и т. п. | 0 |
|
SU210002A1 |
| КОМПОЗИЦИЯ ДЛЯ ПРИГОТОВЛЕНИЯ КИСЛОМОЛОЧНОГО ПРОДУКТА ДЕТСКОГО И ПРОФИЛАКТИЧЕСКОГО ПИТАНИЯ | 1995 |
|
RU2108725C1 |
| JP 4060015 A, 26.02.1992. | |||

