Изобретение относится к технике передачи информации с подвижных объектов, в частности для контроля параметров и местонахождения подвижного объекта, его состояния и других характеристик.
Известны устройства для передачи и приема информации, состоящие на передающей стороне из источников информации (датчиков), генератора тактовых импульсов, модуляторов по числу датчиков, распределителя каналов, формирователя синхроимпульса, передатчика, а на приемной стороне - из приемника, демодуляторов по числу модуляторов, схемы выделения синхроимпульсов, распределителя каналов. Передающая и приемная часть соединены между собой радиоканалом связи [1]. Генератор формирует импульс, определяющий начало цикла передачи информации. В этот момент начинается формирование в распределителе интервалов времени, отводимых на передачу снимаемых с датчиков данных. Данные с выходов модуляторов объединяются на входе передатчика. На приемной стороне после выделения синхроимпульса с помощью распределителя каналов осуществляется выделение исходной информации. Распределители каналов могут быть выполнены на регистрах сдвига. Достоверность передаваемой информации в основном определяется точностью восстановления синхроимпульсов, идентичностью характеристик распределителей каналов, стабильностью генератора тактовых импульсов. Никаких дополнительных мер по повышению помехоустойчивости в устройстве не предусмотрено.
Известна система радиосвязи с подвижными объектами [2]. Она состоит из наземной и бортовой приемопередающих радиостанций, между которыми осуществляется обмен данными в соответствии с заложенными алгоритмами. При обмене сообщениями между наземной приемопередающей станцией и подвижными объектами загрузка канала меняется в зависимости от этапа полета и информационной активности абонентов цифровой радиосвязи. Счетчик числа подвижных объектов контролирует количество объектов и выдает это число на счетчик загрузки системы. В зависимости от числа объектов и числа переспросов сообщений в системе используются динамические алгоритмы организации обмена сообщениями и управления каналами радиосвязи. Для избежания столкновений при одновременной передаче несколькими объектами сообщений осуществляется контроль несущей за время воздействия на бортовой приемник и определяется состояние, когда радиоканал свободен. Для разнесения во времени моментов выхода на связь нескольких подвижных объектов в бортовое устройство введены анализатор несущей частоты и генератор псевдослучайной задержки, которые обеспечивают соответствующую задержку на передачу сообщений от подвижных объектов.
К недостаткам аналога следует отнести:
1. Решение на борту воздушного судна различных навигационных задач практически в реальном масштабе времени усложняет его оборудование и аппаратуру в наземном пункте обработки получаемой с борта информации.
2. Отсутствие в системе кодирующих/декодирующих устройств снижает помехоустойчивость передаваемых данных, что требует со стороны наземной приемо-передающей станции проведения повторных запросов и увеличивает непроизводительную загрузку радиолинии связи.
Наиболее близким по назначению и большинству существенных признаков является устройство для передачи и приема информации с подвижного объекта (ПО) [3], которое и принято за прототип. Оно содержит на передающей части, установленной на подвижном объекте, датчики передаваемой информации, формирователь кодовой последовательности сигналов, модулятор и передатчик, на приемной части, установленной на пункте контроля, приемник, демодулятор, генератор тактовых импульсов, блок изменения фазы тактовой частоты, компаратор, элемент И, регистр, первый и второй сдвиговые регистры.
В прототипе передающая часть устройства устанавливается на подвижном объекте, оснащенном аппаратурой ввода информации с датчиков, например номера ПО и его состояния. Эти данные поступают на входы формирователя кодовой последовательности, преобразующего коды датчиков передаваемой информации в кодовую последовательность импульсов, причем формирование осуществляется байтами. Сформированная кодовая последовательность импульсов поступает на вход модулятора, осуществляющего модуляцию кодовой последовательностью высокочастотных колебаний генератора несущей частоты, входящего в состав модулятора. Передатчик, получающий от модулятора радиосигнал, усиливает его и излучает.
Приемная часть устройства устанавливается в точке контроля и предназначена для приема информации от подвижных объектов. После приема радиосигналов от подвижного объекта на выходе демодулятора формируется кодовая последовательность импульсов, которая поступает на информационные входы первого сдвигового регистра блока изменения фазы тактовой частоты. На первый и второй тактовые входы первого сдвигового регистра поступают две серии тактовых импульсов от генератора, сдвинутые одна относительно другой на 180°. Поступающая на информационный вход блока изменения фазы тактовых импульсов кодовая последовательность дифференцируется. Выбранная серия тактовых импульсов со скважностью шестнадцать ставится в соответствие одному из импульсов, идентифицирующих передний или задний фронт информационных импульсов. В результате на выходе блока изменения фазы присутствуют импульсы текущей серии, синхронные с информационными импульсами. Переключение с одной серии тактовых импульсов на другую осуществляется в момент совпадения тактового импульса текущей серии с передним или задним фронтом информационного импульса принимаемой кодовой последовательности с сохранением записанной до переключения серии тактовых импульсов информации без ее искажения. Выбранная серия тактовых импульсов поступает на тактовые входы сдвиговых регистров с количеством разрядов равным 2·(9n+10) каждый и обеспечивает запись в них двух циклов принимаемой кодовой последовательности. С выходов разрядов синхронизирующей части сдвигового регистра второго цикла и с выходов разрядов синхронизирующей части сдвигового регистра первого цикла логические уровни синхронизирующих частей регистров поступают на формирователь импульса цикловой синхронизации, при этом с выхода последнего разряда сдвигового регистра принимаемая кодовая последовательность поступает на информационный вход второго сдвигового регистра. Импульс цикловой синхронизации формируется в тот момент времени, когда две кодовые последовательности полностью записаны в двух сдвиговых регистрах. При условии совпадения кодов информационных частей первого и второго цикла на входы элемента И одновременно поступают импульс цикловой синхронизации с формирователя и импульс цикловой синхронизации равенства кодов информационных частей сдвиговых регистров с компаратора, при этом с выхода элемента И на тактовый вход регистра поступает импульс разрешения записи, а на информационные входы регистра поступает информация в параллельном коде с выходов соответствующих разрядов информационной части сдвигового регистра первого цикла. Информация, записанная в регистр, выходы которого являются выходами устройства, присутствует в нем до ее изменения при приеме информации от другого подвижного объекта или при изменении характера информации, поступающей с того же подвижного объекта.
Однако прототип имеет следующие недостатки:
- сообщения с ПО выдаются в эфир хаотично во времени, что вызывает коллизии и приводит к снижению помехоустойчивости передаваемых данных;
- не передаются данные о местонахождении ПО;
- отсутствует привязка ко времени передаваемых данных;
- из-за отсутствия «установки в нуль» сдвиговых регистров в определенных условиях могут одновременно появиться импульсы на выходах формирователя импульсов цикловой синхронизации и компаратора. Тогда после срабатывания элемента И произойдет запись в выходной регистр и съем с него ложной информации, что приведет к снижению достоверности данных;
- каждое сообщение с ПО передается 2 раза;
- для выработки импульса цикловой синхронизации в передаваемое сообщение вводится большая избыточность: при наличии n 8-разрядных датчиков длина сообщения равна 2·(9n+10).
Основной задачей, на решение которой направлено заявляемое изобретение, является повышение помехоустойчивости передаваемых данных при увеличении числа передаваемых в единицу времени сообщений.
Указанный технический результат достигается тем, что в устройство для передачи и приема информации с подвижного объекта, содержащее на передающей части, установленной на подвижном объекте, n датчиков передаваемой информации, выходы которых подключены к входам формирователя кодовой последовательности сигналов, выход которого через модулятор подключен к входу передатчика с антенной, выход которого является входом радиоканала связи, а на приемной части, установленной в пункте контроля, - сдвиговый регистр, генератор тактовых импульсов, приемник с антенной, вход которого является выходом радиоканала связи, а выход через демодулятор соединен с информационным входом блока изменения фазы тактовой частоты, первый и второй выходы генератора тактовых импульсов подключены к первому и второму тактовым входам блока изменения фазы тактовых импульсов, введены на передающей части генератор тактовых импульсов, вход которого соединен с первым выходом формирователя кодовой последовательности сигналов, а первый и второй выходы - с первым входом формирователя кодовой последовательности сигналов и первым входом модулятора соответственно, на приемной части - выходная схема, первый и второй элементы И, декодер, приемник сигналов глобальных навигационных спутниковых систем с антенной, счетчик импульсов, дешифратор временных интервалов, формирователь стробов, дешифратор начальной установки, перепрограммируемое запоминающее устройство, причем выход блока изменения фазы тактовой частоты через второй элемент И подключен к тактовому входу декодера, выход демодулятора через первый элемент И соединен также с информационным входом декодера, информационный и тактовый выходы которого подключены к соответствующим входам сдвигового регистра, выход которого через выходную схему, предназначенную для информационно-логического сопряжения устройства с получателем информации, соединен с выходом устройства, третий, четвертый, пятый и шестой выходы генератора тактовых импульсов соединены со вторым входом приемника, вторым входом демодулятора, синхровходом выходной схемы и синхровходом декодера соответственно, а его синхровход - с первым выходом приемника сигналов глобальных навигационных спутниковых систем с антенной, второй выход которого через последовательно соединенные счетчик импульсов, дешифратор временных интервалов подключен к входу формирователя стробов, а третий выход - к первому входу дешифратора начальной установки, выход которого соединен с входом «Установка в нуль» счетчика импульсов, первый выход перепрограммируемого запоминающего устройства соединен со вторым входом дешифратора начальной установки, кроме того, с помощью перепрограммируемого запоминающего устройства задаются параметры дешифратора временных интервалов, первый, второй и третий выходы формирователя стробов подключены к второму входу первого элемента И, четвертому входу декодера и второму входу второго элемента И соответственно.
Формирователь кодовой последовательности сигналов содержит (n+1)-регистров, мультиплексор, кодирующее устройство, формирователь последовательностей импульсов, приемник сигналов глобальных навигационных спутниковых систем с антенной, формирователь номера подвижного объекта, при этом данные с n датчиков передающей части записываются в соответствующие n регистров, (n+1) выходов формирователя последовательностей импульсов соединены с синхровходами (n+1) регистров, (n+2)-й выход формирователя последовательностей импульсов соединен с синхровходом мультиплексора, (n+3)-й выход - с синхровходом кодирующего устройства, первый вход формирователя последовательностей импульсов соединен с первым выходом приемника сигналов глобальных навигационных спутниковых систем с антенной, второй вход - с формирователем номера подвижного объекта, третий вход - с первым выходом генератора тактовых импульсов передающей части, первый и второй выходы приемника сигналов глобальных навигационных спутниковых систем с антенной соединены с информационным входом (n+1)-го регистра и синхровходом генератора тактовых импульсов передающей части, выходы (n+1)-го регистра через последовательно соединенные мультиплексор и кодирующее устройство подключены к информационному входу модулятора передающей части.
Сопоставительный анализ с прототипом показывает, что заявленное устройство для передачи и приема информации отличается наличием новых блоков на передающей части - генератора тактовых импульсов, приемника сигналов глобальных навигационных спутниковых систем с антенной, на приемной части - первого и второго элементов И, декодера, приемника глобальных навигационных спутниковых систем с антенной, счетчика импульсов, дешифратора временных интервалов, формирователя стробов, дешифратора начальной установки, перепрограммируемого запоминающего устройства и их связями с остальными блоками устройства.
Таким образом, заявляемое устройство соответствует критерию «новизны».
Сравнение заявляемого устройства с другими техническими решениями показывает, что в известных устройствах для передачи и приема информации используются формирователи кодов, модуляторы, передатчики, приемники, демодуляторы [1, 2, 4, 5]. Для синхронизации на приемной части используются генераторы тактовых импульсов, блоки изменения фазы тактовых импульсов, регистры, элементы И, формирователи. Однако введение этих элементов с заданными связями не позволяет получить положительный эффект из-за неработоспособности такого объекта, что подчеркивает выполнение требования «изобретательский уровень» и не следует из известного уровня техники.
Реализация всех узлов заявляемого устройства на серийных ИМС и электрорадиоэлементах, а также с помощью программных методов показывает его практическую применимость.
Сущность изобретения будет понятна из приведенных фиг.1, 2 и описания.
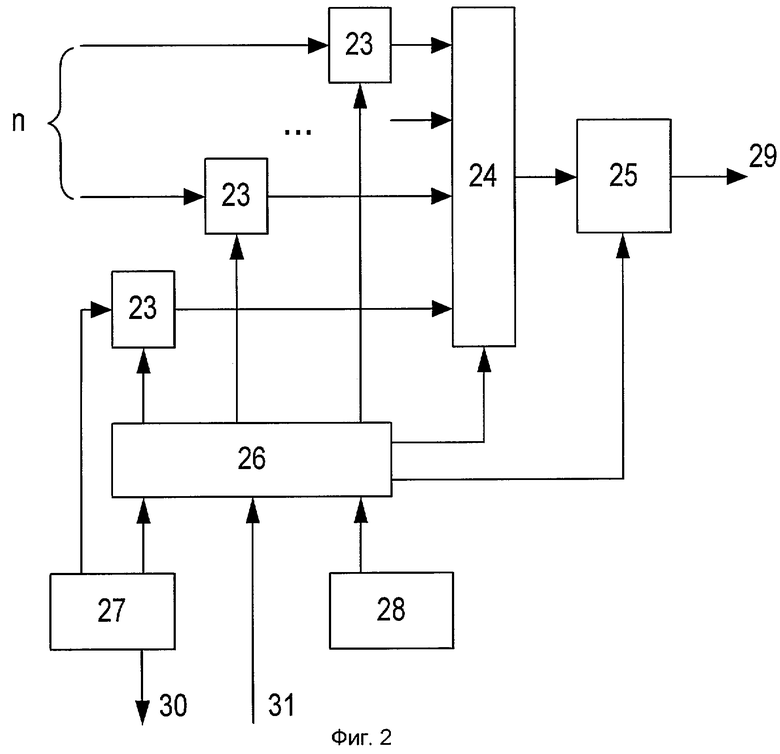
На фиг.1 приведена структурная схема заявляемого устройства и введены обозначения:
1 - передающая часть;
2 - датчик;
3 - формирователь кодовой последовательности сигналов;
4 - модулятор;
5 - передатчик с антенной;
6 - генератор тактовых импульсов;
7 - приемная часть;
8 - приемник с антенной;
9 - демодулятор;
10 - генератор тактовых импульсов;
11 - блок изменения фазы тактовых импульсов;
12 - сдвиговый регистр;
13 - первый элемент И;
14 - декодер;
15 - выходная схема;
16 - приемник сигналов глобальных навигационных спутниковых систем с антенной;
17 - счетчик импульсов;
18 - дешифратор временных интервалов;
19 - формирователь стробов;
20 - дешифратор начальной установки;
21 - второй элемент И;
22 - перепрограммируемое запоминающее устройство.
Радиоканал связи и элементы питания на фиг.1 не показаны.
На фиг.2 приведена структурная схема формирователя кодовой последовательности сигналов и введены обозначения:
23 - регистр;
24 - мультиплексор;
25 - кодирующее устройство;
26 - формирователь последовательностей импульсов;
27 - приемник сигналов глобальных навигационных спутниковых систем с антенной;
28 - формирователь номера ПО;
29 - выход формирователя кодовой последовательности сигналов;
30 - второй выход приемника сигналов глобальных навигационных спутниковых систем с антенной;
31 - вход с генератора тактовых импульсов 6.
Устройство для передачи и приема информации с подвижного объекта (фиг.1) содержит на передающей части 1, установленной на подвижном объекте, датчики 2 передаваемой информации, формирователь 3 кодовой последовательности сигналов, модулятор 4, передатчик 5 с антенной, генератор 6 тактовых импульсов, приемную часть 7, установленную на пункте контроля, приемник 8 с антенной, демодулятор 9, генератор 10 тактовых импульсов, блок 11 изменения фазы тактовой частоты, сдвиговый регистр 12, первый элемент И 13, декодер 14, выходную схему 15, приемник 16 сигналов глобальных навигационных спутниковых систем с антенной, формирователь 17 импульсов, дешифратор 18 временных интервалов, формирователь 19 стробов, дешифратор 20 начальной установки, второй элемент И 21, перепрограммируемое запоминающее устройство 22.
Формирователь 3 кодовой последовательности сигналов содержит регистр 23, мультиплексор 24, кодирующее устройство 25, формирователь 26 последовательностей импульсов, приемник 27 сигналов глобальных навигационных спутниковых систем с антенной, формирователь 28 номера ПО, выход 29 формирователя кодовой последовательности сигналов, второй выход 30 приемника сигналов глобальных навигационных спутниковых систем с антенной, вход 31 с генератора тактовых импульсов 6.
Устройство работает следующим образом. Передающая часть 1 устанавливается на подвижном объекте, оснащенном аппаратурой ввода информации, например с n датчиков 2. В качестве датчиков могут быть использованы контактные и кнопочные выключатели, тумблеры для установки кода и другие узлы. Вид выходной информации с датчиков 2 определяется требованиями к параметрам входных сигналов формирователя 3 кодовой последовательности сигналов. Данные с n датчиков 2 записываются в соответствующие регистры 23 и с помощью мультиплексора 24 в определенной последовательности, известной в приемной части, поступают на кодирующее устройство 25. Номер ПО передавать не требуется, так как номер ПО заложен в соответствующем временном интервале, отведенном для передачи данных. Поэтому формирователь номера ПО 28 (индивидуальный для каждого ПО) определяет только время начала и конца передачи с ПО данных. Начало отсчета времени в устройстве может быть привязано, например, к московскому или среднеевропейскому времени. Длительность времени передачи данных с ПО должна быть увеличена на длительность защитного интервала, зависящего от радиуса действия устройства. Точная привязка времени передачи данных осуществляется с помощью меток времени, поступающих с выхода приемника 27 сигналов глобальных навигационных спутниковых систем с антенной на вход формирователя 26 импульсных последовательностей. Соответствующие импульсные последовательности используются для операций записи информации с датчиков 2, с выхода приемника 27 сигналов глобальных навигационных спутниковых систем с антенной и считывания данных со всех регистров 23. Данные о точном местоположении ПО, 1-секундные метки времени и 10 килогерцовый меандр, синхронные с глобальным временем, могут быть получены с выхода приемника 27 сигналов глобальных навигационных спутниковых систем с антенной, например, GPS/ГЛОНАСС. Данные о точном местоположении ПО с привязкой к глобальному времени с (n+1)-го регистра 23 подаются на (n+1)-й вход формирователя 3 кодовой последовательности сигналов. Импульсные последовательности формирователя 3 кодовой последовательности сигналов используются также для синхронизации процессов в мультиплексоре 24 и кодирующем устройстве 25. Для исключения биения из-за отличия частот генераторов 6 и 10 тактовых импульсов передающей и приемной сторон 1 и 7 соответственно на их входы подаются для синхронизации 1-секундные метки времени с выходов соответствующих приемников сигналов глобальных навигационных спутниковых систем с антеннами, синхронные с глобальным временем. При формировании импульсных последовательностей в формирователе 3 используются сигналы с первого выхода генератора 6 тактовых импульсов, а со второго его выхода сигналы тактовой частоты подаются на модулируемый вход модулятора 4 для дальнейшего известного преобразования [7].
Общее число подвижных объектов, снабженных передающей частью 1 и входящих в заявляемое устройство, не превышает величины отношения длительностей требуемого времени на обновление информации и длительности посылки сообщения, вырабатываемого на передающей части 1, с учетом длительности защитного интервала. В формирователе 3 кодовой последовательности сигналов входной параллельный формат данных преобразуется в последовательную кодовую посылку. Затем кодовая посылка для повышения помехоустойчивости преобразуется с помощью известных методов [7] в кодирующем устройстве 25. Длительность одного разряда сообщения с ПО выбирается из условия прохождения без искажений импульсов по радиоканалу связи. Однако чрезмерное увеличение длительности одного разряда увеличивает длительность всей посылки, а при заданном времени оценки информации с каждого подвижного объекта эта операция уменьшает число обслуживаемых объектов. Импульсная последовательность в модуляторе 4 преобразуется в радиосигналы, которые усиливаются в передатчике 5 с антенной и излучаются в пространство. Дальность действия устройства ограничивается прямой видимостью в УКВ диапазоне и зависит от мощности передатчика 5, отношения сигнал/шум на входе приемника 8 и вида выходного кода формирователя 3 кодовой последовательности сигналов. Введение избыточности за счет кодирования позволяет уменьшить вероятность ошибочного приема сообщения у получателя информации. В качестве помехоустойчивого кода может быть использован, например, мажоритарный код, применяемый в подвижных системах связи, и соответствующие способы борьбы с замираниями в многолучевом канале радиосвязи [7]. Для передачи может быть использована амплитудная, фазовая или частотная модуляция. Частота выдачи сообщений с ПО зависит от требований получателя информации, требуемого объема данных и скорости перемещения ПО.
Приемная часть 7 устройства устанавливается в точке контроля стационарно или на мобильном объекте и предназначена для приема информации от подвижных объектов, снабженных передающей частью 1. Принимаемые с передающих частей 1 радиосигналы усиливаются в приемнике 8 с антенной. Затем в демодуляторе 9 они преобразуются в импульсную последовательность, которая подается на информационные входы первой схемы И 13 и блока 11 изменения фазы тактовых импульсов, на первый и второй тактовые входы которого поступают две серии тактовых импульсов от генератора 10, сдвинутые одна относительно другой на 180°. В блоке 11 изменения фазы тактовых импульсов обеспечивается автоматическое переключение с одной серии импульсов на другую при совпадении переднего или заднего фронта любого информационного импульса принятой кодовой последовательности с передним фронтом тактового импульса текущей серии. Причем после переключения на другую серию тактовые импульсы новой серии оказываются в средней части информационных импульсов, что обеспечивает дополнительную устойчивость работы декодера 14.
Запись информации в сдвиговый регистр 12 осуществляется по спаду тактовых импульсов с выхода декодера 14, сфазированных информационными сигналами с выхода демодулятора 9 и прошедших через первый элемент И 13. Этим дополнительно исключаются биения из-за различия частот генераторов 6 и 10 тактовых импульсов передающей и приемной сторон 1 и 7 соответственно. Запись в сдвиговый регистр 12 осуществляется тактовыми импульсами, прошедшими второй элемент И 21 во время соответствующего строба с формирователя 19 стробов. Этим обеспечивается защита от выдачи получателю «нулевой» информации.
Передача информации с выхода демодулятора 9 в декодер 14 осуществляется через первый элемент И 13 при наличии соответствующего строба приема с формирователя 19 стробов. После проведения известных операций декодирования [7] в стробе с формирователя 19 стробов проводится считывание данных, со скоростью, превышающей скорость передачи сообщений в радиоканале связи. Этим обеспечивается уменьшение времени, отводимого на прием и обработку данных от каждого ПО. Для записи информации в сдвиговый регистр 12 используются тактовые импульсы, синхронные с информацией и формируемые из стробов формирователя 19 стробов и сигналов с шестого выхода генератора 10 тактовых импульсов. Каждое новое сообщение с ПО обеспечивает передачу данных со сдвигового регистра 12 в выходную схему 15. Она предназначена для информационно-логического сопряжения устройства с получателем информации. Преобразование форматов и параметров сообщений осуществляется известными методами [6, 7]. Например, если в качестве получателя информации используется ЭВМ, то данные можно выдавать в виде, определяемом требованиями к цепям стыка С2 (ГОСТ 18145-81) [6].
Приемник 16 сигналов глобальных навигационных спутниковых систем с антенной в приемной части 7 используется для синхронизации генератора 10 тактовых импульсов, формирования импульсов для счетчика 17 импульсов и выдачи меток времени для дешифратора 20 начальной установки. С выхода счетчика 17 импульсов сигналы поступают на дешифратор 18 временных интервалов. Снимаемые с его выхода импульсы начала и конца соответствующего строба подаются на формирователь 19 стробов. Установка в нуль счетчика 17 импульсов осуществляется импульсами с выхода дешифратора 20 начальной установки. Основные параметры дешифраторов 18 и 20 задаются с помощью перепрограммируемого запоминающего устройства 22, содержание которого зависит от числа ПО, требований получателей информации и других параметров. С появлением новых, обслуживаемых устройством ПО данные перепрограммируемого запоминающего устройства 22 постоянно обновляются.
Генератор 10 тактовых импульсов формирует прямой и инверсный сигналы для блока 11 изменения фазы тактовой частоты и другие стабильные во времени сигналы для проведения известных операций в приемнике 8 и демодуляторе 9 [7].
Вероятность столкновений сообщений от нескольких ПО мала за счет сокращения избыточности передаваемого сообщения и большой величины отношения длительности периода обновления данных с ПО к длительности сообщения. Жесткая привязка начала передаваемых сообщений к 1-секундным меткам, (например, выход 1 PPS приемника сигналов системы GPS) и синхронному с ними меандру частотой 10 кГц (выход 10KHz приемника сигналов системы GPS) с выходов приемников глобальных навигационных спутниковых систем с антенной, установленных в передающей части 1 ПО, и плановое выделение для передачи данных с каждого ПО соответствующего временного интервала позволит также сократить вероятность столкновений сообщений. Установка на обслуживание устройством каждого нового ПО осуществляется с помощью установки на нем передающей части 1 с индивидуальным формирователем номера ПО 28. Одновременно с этой процедурой соответствующие данные вводятся в перепрограммируемое запоминающее устройство 22 приемной части 7.
Выдача тактовых импульсов в регистр 12 через второй элемент И 21 осуществляется только на время выделенного временного интервала связи для соответствующего ПО с выхода формирователя 19 строба, что также повышает помехоустойчивость данных, выдаваемых потребителям.
Блоки 1-5, 7-12 по назначению и структуре одинаковые с прототипом. Они могут быть реализованы на известных серийных элементах и узлах. Введенные блоки 6, 13-28 могут быть также реализованы на известных микросхемах и устройствах. Функции блоков 3, 10-15, 17-22, 23-26, 28 могут быть выполнены программно с помощью микроЭВМ или ПЭВМ, узлы 27 и 16 - на устройствах Jupiter, выпускаемых фирмой "Trimble Navigation Ltd" для системы GPS. В качестве передатчиков 5 и приемников 8 могут быть использованы передатчики и приемники систем сотовой связи, радиолиний коротковолнового, метрового и дециметрового диапазонов.
К преимуществам заявляемого устройства следует отнести:
- повышение помехоустойчивости устройства за счет введения кодирующих/декодирующих устройств и использования для синхронизации передающей и приемной частей меток единого (глобального) времени с выхода приемников глобальных навигационных спутниковых систем;
- использование информации существующих навигационных спутников, предназначенных для обеспечения данными всевозможных подвижных объектов;
- использование известных экстраполяционных методов у получателя информации при наличии координатной информации с точным глобальным временем проведения измерений позволит определить следующую точку на трассе перемещающегося в пространстве объекта;
- точность определения местонахождения ПО зависит от точности обработки принимаемых в передающей части 1 ПО сообщений с навигационных спутников и может составлять 10 м [8];
- уменьшена длина сообщения, передаваемого с ПО, за счет сокращения избыточных разрядов, отводимых для синхронизации и номера ПО, что позволит увеличить число обслуживаемых ПО.
Устройство может быть использовано для передачи данных с транспортных подвижных объектов: автомобилей, поездов, речных и морских судов, воздушных судов малой авиации.
Литература
1. Венедиктов Н.Д. и др. Асинхронные адресные системы связи - М.: Связь, 1978.
2. А.С. СССР №1401727 М. кл. Н 04 В 7/27, H 04 L 27/00, БИ №21, 1988.
3. A.C. СССР №1715773 М. кл. G 08 C 21/00, 1990. Прототип.
4. Радиосистемы передачи информации: Учеб. пособие для ВУЗов / И.М.Тепляков и др. Под ред. И.М.Теплякова. - М.: Радио и связь, 1982.
5. А.С. СССР №795879. М. кл. G 08 C 21/00, 1979.
6. ГОСТ 18145-81. Цепи на стыке С2 аппаратуры передачи данных с оконечным оборудованием при последовательном вводе-выводе данных. Номенклатура и технические требования. М.: 1981.
7. Уильям К. Ли. Техника подвижных систем связи. - М., Радио и связь, 1985, 391 с.
8. Глобальная система позиционирования М.: АО «Прин», 1994, 77 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МНОГОКАНАЛЬНОЙ РАДИОСВЯЗИ | 2023 |
|
RU2809552C1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2780810C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2001 |
|
RU2195774C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 2014 |
|
RU2563145C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2702622C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2001 |
|
RU2207614C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2023 |
|
RU2819030C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2014 |
|
RU2556872C1 |
| СИСТЕМА РАДИОСВЯЗИ | 2020 |
|
RU2762574C1 |
Изобретение относится к технике передачи и приема информации с подвижного объекта (ПО) и радиосвязи. Достигаемый результат - повышение помехоустойчивости передаваемых данных при увеличении числа передаваемых в единицу времени сообщений. Для этого в устройство введены на передающей части кодирующее устройство, а в приемной части - декодер. Предложено синхронизовать интервалы выдачи данных с ПО с глобальным единым временем. Для этого в передающую и приемную части введены приемники сигналов глобальных навигационных спутниковых систем. Они в то же время являются датчиками точного местонахождения ПО. Обслуживание устройством каждого нового ПО осуществляется путем установки на его передающей части индивидуального формирователя номера ПО. Одновременно с этой процедурой соответствующие данные вводятся в перепрограммируемое запоминающее устройство приемной части. 1 з.п. ф-лы, 2 ил.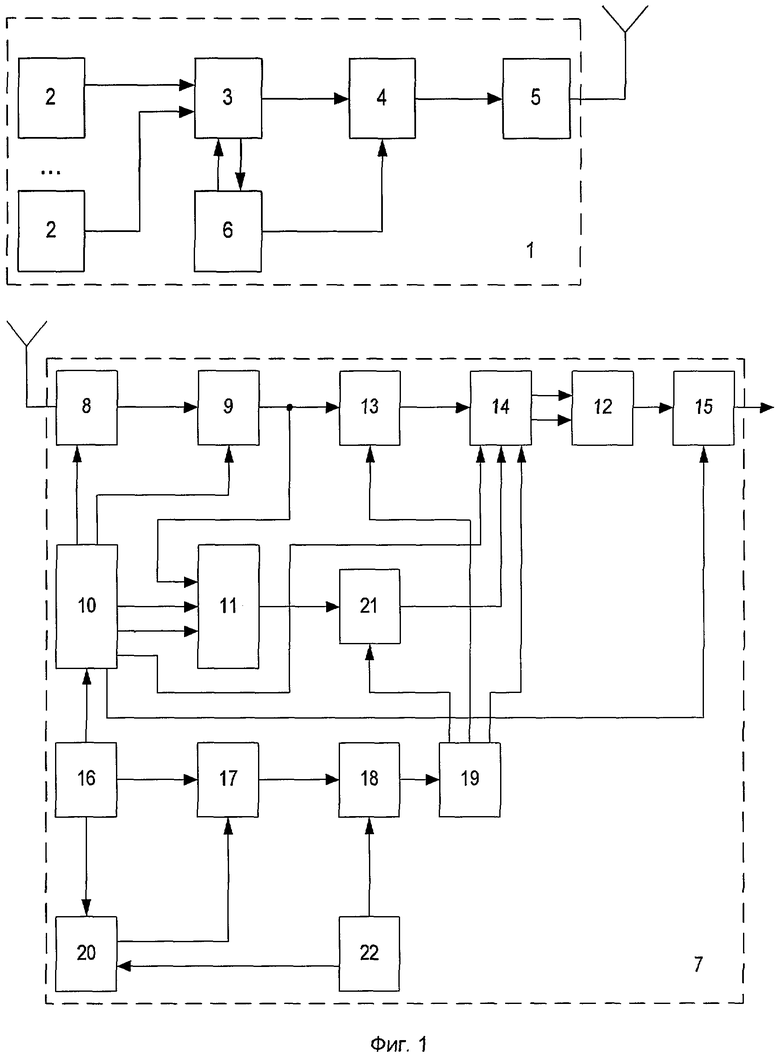
| УИЛЬЯМ К | |||
| ЛИ | |||
| Техника подвижных систем связи, Москва, Радио и связь, 1985, с.391 | |||
| Система радиосвязи с подвижными объектами | 1986 |
|
SU1401626A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УДАЛЕННОГО ОБЪЕКТА, СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ И ИНТЕГРИРОВАННАЯ СИСТЕМА, ОСУЩЕСТВЛЯЮЩАЯ ЭТИ СПОСОБЫ | 1993 |
|
RU2128884C1 |
| RU 2002131424 A, 27.05.2004 | |||
| WO 9115071 А1, 03.10.1991 | |||
| US 2005013272 A1, 20.01.2005. | |||

