Изобретение относится к области гидроакустики и может быть использовано для градуировки и калибровки приемных линейных гидроакустических антенн (ЛГА) в лабораторных условиях.
Известен способ аналогичного назначения, заключающийся в расположении в протяженной узкой замкнутой гидрокамере (ПУЗГ) опорных гидрофонов и гидроакустических излучателей, возбуждаемых электрическими сигналами [Патент США№4468760, кл. 367-13, (H 04 R 29/00), 1984].
В данном аналоге в ПУЗГ с помощью гидроакустических излучателей моделируется плоская волна, падающая под некоторым углом к испытуемой ЛГА. Измеряя параметры выходного сигнала ЛГА при изменении угла падения, определяют характеристику направленности и чувствительность ЛГА.
Недостатком известного способа является сложность определения величин сигналов, подаваемых на излучатели, возникающая из-за необходимости проведения предварительных измерений.
Известен способ моделирования плоских акустических волн одномерных акустических полей в ПУЗГ, заключающийся в эквидистантном расположении в гидрокамере N гидроакустических излучателей и воздействии на них электрическими сигналами [Патент РФ №2116705, кл. H 04 R 29/00, 1998], принятый за прототип.
Гидроакустические излучатели в ПУЗГ в прототипе располагают таким образом, чтобы максимальное расстояние между любыми соседними излучателями не превышало величины π/kmax, где kmax - максимальное волновое число моделируемого акустического поля, а воздействующие на излучатели электрические сигналы удовлетворяют математическому соотношению

где  - вектор с элементами
- вектор с элементами

где un - электрический сигнал, подаваемый на n-й излучатель, a En - его чувствительность на излучение,  - матрица, обратная к матрице
- матрица, обратная к матрице  с элементами
с элементами  ;
;  - радиус-вектор точки, в которой размещен m-й излучатель,
- радиус-вектор точки, в которой размещен m-й излучатель,  - решение волнового уравнения для требуемого объема в случае, когда в нем работает только n-й излучатель,
- решение волнового уравнения для требуемого объема в случае, когда в нем работает только n-й излучатель,  - вектор с элементами
- вектор с элементами  ,
,  - функция распределения давления в моделируемом акустическом поле.
- функция распределения давления в моделируемом акустическом поле.
Для случая моделирования в ПУЗГ гармонического акустического поля

где Рm - давление моделируемого гармонического акустического поля в точке расположения m-го излучателя, Р0 - амплитуда акустического давления моделируемого поля, k0 - волновое число моделируемого поля, xm - продольная координата точки расположения m-го излучателя, θ - угол падения моделируемой волны на ось ПУЗГ.
При этом элементы матрицы имеют следующий вид
где L - длина ПУЗГ, k - волновое число акустического поля в ПУЗГ, x - продольная координата, xn - координата точки расположения n-го излучателя.
Недостатком прототипа является необходимость проведения большого количества расчетов при моделировании одномерных гармонических акустических полей: вначале следует рассчитывать элементы матрицы , количество которых равняется N2, после чего проводить сложные матричные вычисления для определения элементов обратной матрицы  , количество которых также равняется N2.
, количество которых также равняется N2.
Техническим результатом, получаемым от внедрения изобретения является устранение недостатка прототипа, т.е. уменьшение количества расчетов при моделировании одномерных гармонических акустических полей.
Данный технический результат достигается за счет того, что в известном способе моделирования акустических полей в ПУЗГ, заключающегося в эквидистантном расположении в гидрокамере N гидроакустических излучателей и воздействии на них электрическими сигналами, гидроакустические излучатели в гидрокамере располагаются таким образом, чтобы расстояние между излучателями не превышало половины длины волны моделируемого гармонического акустического поля, а амплитуды акустического давления, создаваемого излучателями, удовлетворяли математическому соотношению




где pm, m=0,..., N-1 - акустическое давление, создаваемое m-м излучателем, θ - угол падения моделируемого поля, е - число "е", i - мнимая единица, k0 - волновое число моделируемого акустического поля, d - расстояние между излучателями, k - волновое число акустического поля в гидрокамере, x0 - координата нулевого излучателя, L - длина гидрокамеры.
Существо способа заключается в следующем. Для простоты выкладок зависимость от угла падения ниже будет опускаться в выражениях рm и А. Исходное матричное уравнение (1) для случая моделирования гармонического одномерного поля при m=0 записывается в следующем виде
Подставляя в это уравнение выражение для F0,n получаем

Аналогично из уравнения (1) при m=N-1 получаем

Из уравнения (1) при m=7, проделав необходимые математические выкладки с учетом (7) и (8), получаем
Из уравнения (1) при m=N-2, проделав необходимые математические выкладки с учетом (7) и (8), получаем

Рассмотрение уравнения (3) для произвольного значения m позволяет получить рекуррентное выражение для pm, m=1, ..., N-2.

Данное рассмотрение требует большого количества математических выкладок, которые здесь и ниже опускаются, как не являющиеся принципиальными для раскрытия существа заявляемого способа.
Из последнего выражения получаем для m=1

Кроме этого полученное выражение (11) позволяет от рекуррентного выражения перейти к прямому выражению для рm

Таким образом, полученные выражения (9), (12), (13) и (10) являются выражениями для рm, m=0, ..., N-1 в аналитическом виде, представленными в математическом соотношении (5).
Расстояние между излучателями в данном случае задается выражением
где λ - длина волны акустического поля в ПУЗГ.
Изобретение поясняется чертежом, на котором представлена схема ПУЗГ. Вдоль гидрокамеры 1 длиной L эквидистантно с шагом d расположены N излучателей 2. В гидрокамеру помещают ЛГА 3. Задающий генератор создает электрический сигнал частотой f, который подается на N генераторов сигнала. Этот сигнал определяет частоту выходных гармонических сигналов всех генераторов сигнала. Затем определяется амплитуда Р0 и угол падения θ моделируемого гармонического поля. По формулам (5) рассчитывают комплексные амплитуды акустического давления рm, m=0,..., N-1, которое должны создать излучатели. По формуле (2) рассчитывают комплексные амплитуды электрических сигналов, которые следует подать на излучатели, т.е. амплитуды выходных сигналов генераторов. При этом предварительно следует измерить скорость звука в ПУЗГ с и чувствительности излучателей Еm, m=0,..., N-1.
После установления в гидрокамере моделируемого акустического поля, измеряется выходной сигнал ЛГА, по которому определяются ее параметры.
Изобретение относится к области гидроакустики и может быть использовано для градуировки и калибровки линейных приемных гидроакустических измерительных антенн в лабораторных условиях. Техническим результатом изобретения является упрощение процесса моделирования. Способ моделирования одномерных гармонических акустических полей в протяженной узкой замкнутой гидрокамере заключается в том, что в ней располагают гидроакустические излучатели таким образом, чтобы максимальное расстояние между любыми соседними излучателями не превышало половины длины волны моделируемого гармонического поля, а амплитуды акустического давления, создаваемого излучателями, удовлетворяли определенным соотношениям. 1 ил.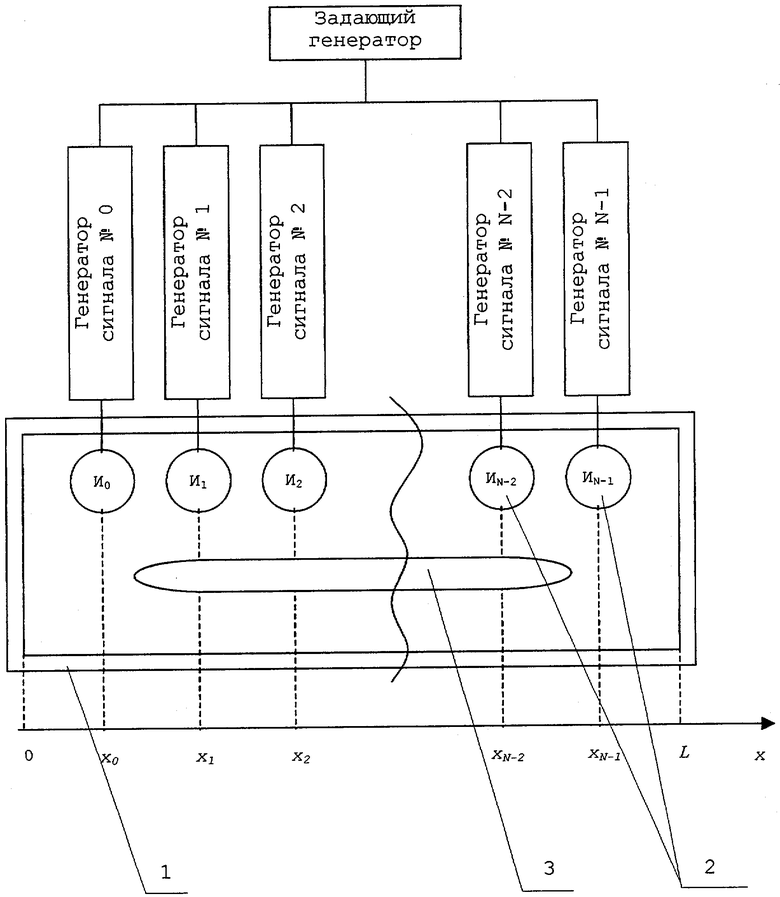
Способ моделирования одномерных гармонических акустических полей в протяженной узкой замкнутой гидрокамере, заключающийся в эквидистантном расположении в гидрокамере N гидроакустических излучателей и воздействии на них электрическими сигналами, отличающийся тем, что гидроакустические излучатели в гидрокамере располагают таким образом, чтобы расстояние между излучателями не превышало половины длины волны моделируемого акустического поля, а амплитуды акустического давления, создаваемого излучателями, удовлетворяли математическому соотношению




где pm, m=0,..., N-1 - акустическое давление, создаваемое m-м излучателем, θ - угол падения моделируемого поля, е - число "е", i - мнимая единица, k0 - волновое число моделируемого акустического поля, d - расстояние между излучателями, k - волновое число акустического поля в гидрокамере, x0 - координата нулевого излучателя, L - длина гидрокамеры.
| СПОСОБ МОДЕЛИРОВАНИЯ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ | 1997 |
|
RU2116705C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ГИДРОАКУСТИЧЕСКОЙ АНТЕННОЙ РЕШЕТКИ В ЛАБОРАТОРНЫХ УСЛОВИЯХ | 1996 |
|
RU2106763C1 |
| Пазонный способ моделирования физических полей | 1989 |
|
SU1804649A3 |
| МАГНИЕТЕРМИЧЕСКИЙ СПОСОБ ПОЛУЧЕНИЯ ГУБЧАТОГО ЦИРКОНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2261286C2 |

