Изобретение относится к измерительной технике и может быть использовано для поиска зон повышенного акустического излучения по длине транспортных средств - на автомобильном или железнодорожном транспорте, а также на судах различного назначения при их диагностическом обследовании.
Известен способ определения зоны повышенного акустического излучения по длине транспортного средства, используемый, например, при определении доминирующих шумовых источников (см. Р.Дж.Урик. Основы гидроакустики. / - Л.; Судостроение, 1978, стр.346÷347).
Сущность способа можно пояснить на примере ходовых испытаний кораблей, когда движущийся корабль проходит на близком расстоянии от измерительного гидрофона. В основе способа - определение звукового давления, обусловленного источниками - различными виброактивными механизмами, распределенными по длине испытуемого корабля. При этом положение источника звука (шум машин, винта), а следовательно, и положение источника энергии гидроакустического поля, определяют сопоставлением максимумов звукового давления с частями корабля, которые в момент возникновения максимумов оказываются ближайшими к приемнику (гидрофону).
Недостатком рассматриваемого способа является низкая разрешающая способность локализации отдельных источников, формирующих гидроакустическое поле, обусловленная применением для определения звукового давления ненаправленного приемника. Неточное определение положения источника звукового давления по длине транспортного средства обуславливает неверную оценку расстояния между источником и приемником звукового давления, и, как следствие, искаженную оценку уровня звукового давления.
Наиболее близким по технической сущности к предлагаемому решению является способ аддитивного направленного приема, основанный на использовании интерференции сигналов, снимаемых с выходов отдельных приемников при падении на антенну волны от акустического источника.
Особенностью способа является то, что расстояния между приемными элементами антенны должны быть меньше половины длины волны принимаемого сигнала (См.: А.К.Новиков. Статистические измерения в судовой акустике. Л.: Судостроение, 1985, стр.263÷266). Этот способ определения звукового давления при помощи средств направленного приема принят за прототип. При поиске зон повышенного акустического излучения протяженного объекта измерений разрешающую способность способа-прототипа определяют апертурой антенны.
Сущность способа-прототипа для аддитивной антенны в режиме приема сводится к следующим операциям:
1) многоканальный прием сигнала излучения;
2) суммирование принятых сигналов в полосе частот;
3) выделение огибающей суммарного сигнала путем амплитудного детектирования;
4) регистрация огибающей суммарного сигнала.
В последнем случае поиск максимума огибающей суммарного сигнала, соответствующего положению источника звука по длине транспортного средства, производится при относительном движении транспортного средства и неподвижной антенны. Для неподвижного транспортного средства оценку положения источника осуществляют путем сканирования диаграммой направленности антенны.
Недостаток способа-прототипа - низкая разрешающая способность при определении положения двух и более близкорасположенных источников звука при постоянной апертуре антенны. Повышение разрешающей способности направленного приема возможно при увеличении апертуры антенны. При практических измерениях это либо конструктивно нереализуемо, либо приводит к увеличению числа приемных элементов антенны для обеспечения выбора приемных элементов в соответствии с заданными волновыми размерами, что обуславливает необходимость изменения апертуры антенны.
Задачей изобретения является увеличение разрешающей способности способа определения звукового давления с использованием направленного приема при постоянной апертуре антенны и, соответственно, без увеличения числа приемных элементов.
Это достигается тем, что дополнительно формируется диаграмма направленности второй антенны, обладающая множеством равнозначных лепестков максимального уровня путем умножения частоты каждого из полосовых сигналов, их суммирования и амплитудного детектирования.
Сущность предложенного технического решения поясняется фигурами 1÷8.
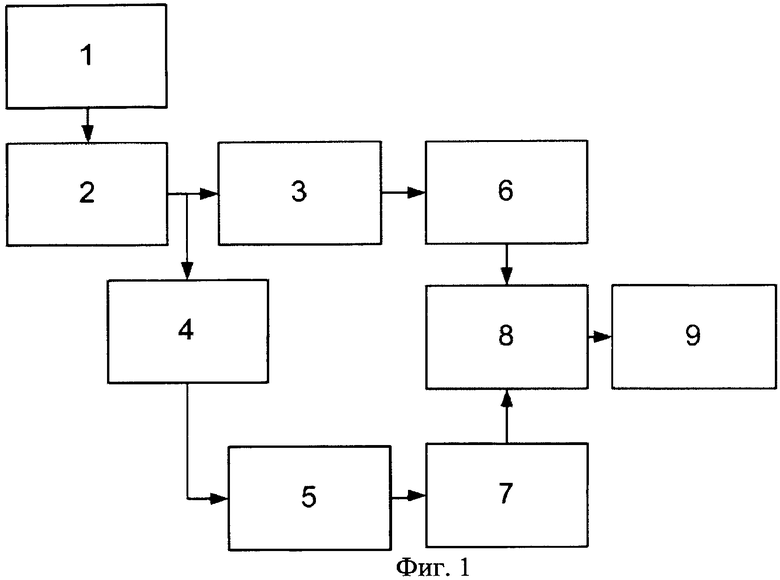
Устройство, реализующее предлагаемый способ (фиг.1), содержит многоканальный приемник 1, соединенный через блок полосовых фильтров 2 с входами сумматора 3 и входами блока умножителей частоты 4, выходы которого подключены к входам сумматора 5. Выход сумматора 3 через амплитудный детектор 6 соединен с первым входом умножителя результатов амплитудного детектирования 8, другой вход которого соединен через амплитудный детектор 7 с выходом сумматора 5. Выход умножителя результатов детектирования 8 соединен с входом регистратора 9 - выходом устройства в целом.
С использованием описанного устройства предложенный способ реализуется следующим образом.
Входной сигнал принимается приемником 1 - линейной антенной, состоящей из эквидистантных измерительных преобразователей - микрофонов или гидрофонов. После полосовой фильтрации сигналов, снимаемых с выходов измерительных преобразователей, блоком полосовых фильтров 2, их мгновенные частоты подвергаются умножению на число эквидистантных приемников в блоке умножителей частоты 4. Затем осуществляется их суммирование в сумматоре 3 и последующее амплитудное детектирование амплитудным детектором 6. Путем детектирования полосовых сигналов, формируемых на выходах сумматоров 3 и 5, осуществляется формирование двух диаграмм направленности антенны: одна диаграмма - для исходных сигналов, и вторая диаграмма - для сигналов, полученных в результате умножения мгновенных частот суммируемых сигналов.
Оценку координат источника звука по результатам определения звукового давления осуществляют путем сопоставления максимумов диаграмм направленности, полученных для неизвестного по положению источника и для опорного источника, координаты которого априорно известны. При практических измерениях в качестве опорного источника рассматривают излучатель звука, устанавливаемый в заданной точке на корпусе протяженного транспортного средства.
Работа устройства в соответствии с предлагаемым способом описывается следующим образом.
Пусть, например, на линейную эквидистантную антенну, состоящую из n приемных элементов, падает плоская волна под углом θ. Разность хода лучей между первым и n приемными элементами составляет
ΔS=(n-1)dsinθ,
где n - число элементов антенны;
d - расстояние между соседними приемными элементами.
Разность задержек между элементами равна  , где c - скорость распространения волны. Для упрощения изложения процедура компенсации диаграммы направленности не рассматривается.
, где c - скорость распространения волны. Для упрощения изложения процедура компенсации диаграммы направленности не рассматривается.
В результате синфазного сложения полосовых сигналов в сумматоре 3, как и в способе-прототипе, формируется исходная диаграмма направленности. При этом условием единственности главного лепестка диаграммы направленности является соотношение  . При
. При  диаграмма направленности становится многолепестковой, так как в ней появляются дополнительные лепестки, равные по уровню основному лепестку, но более узкие по ширине. Таким образом, изменение длины волны, и, соответственно, изменение частоты исследуемых сигналов приводит к формированию диаграмм направленности с более узкими лепестками.
диаграмма направленности становится многолепестковой, так как в ней появляются дополнительные лепестки, равные по уровню основному лепестку, но более узкие по ширине. Таким образом, изменение длины волны, и, соответственно, изменение частоты исследуемых сигналов приводит к формированию диаграмм направленности с более узкими лепестками.
Умножение сигнала по частоте может быть реализовано путем выделения мгновенной амплитуды и мгновенной фазы сигнала с ее умножением, а следовательно, и умножением частоты в заданное число раз. С этой целью используется преобразование Гильберта узкополосного сигнала и модуляция гармонического сигнала на средней частоте полосового фильтра по амплитуде и фазе после ее умножения.
Появление боковых лепестков равного уровня приводит к неоднозначности определения положения источника по длине транспортного средства, которая устраняется путем перемножения исходной диаграммы направленности и диаграмм направленности (исходной антенны и антенны, сформированной в результате умножения сигналов по частоте).
Использование предлагаемого способа приведено на примере компьютерного моделирования работы устройства.
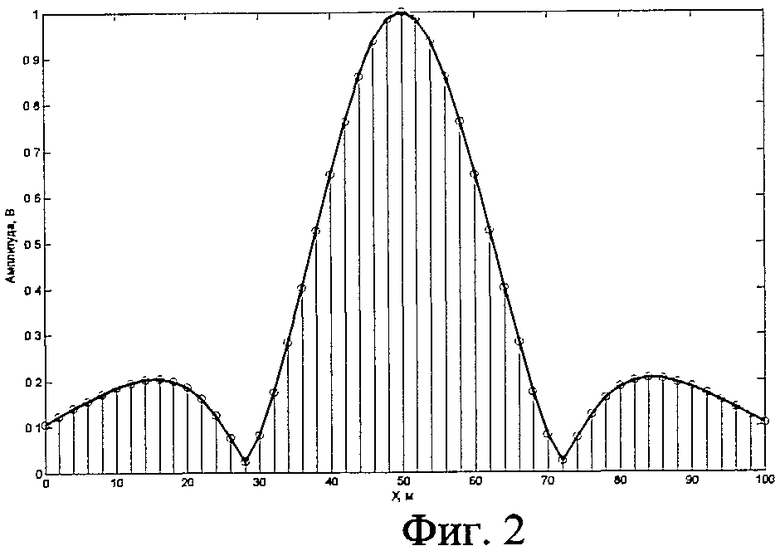
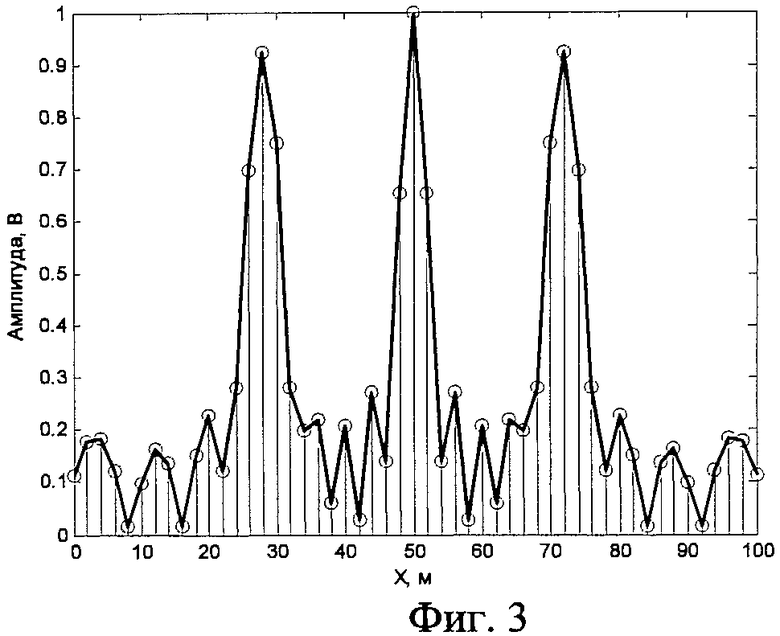
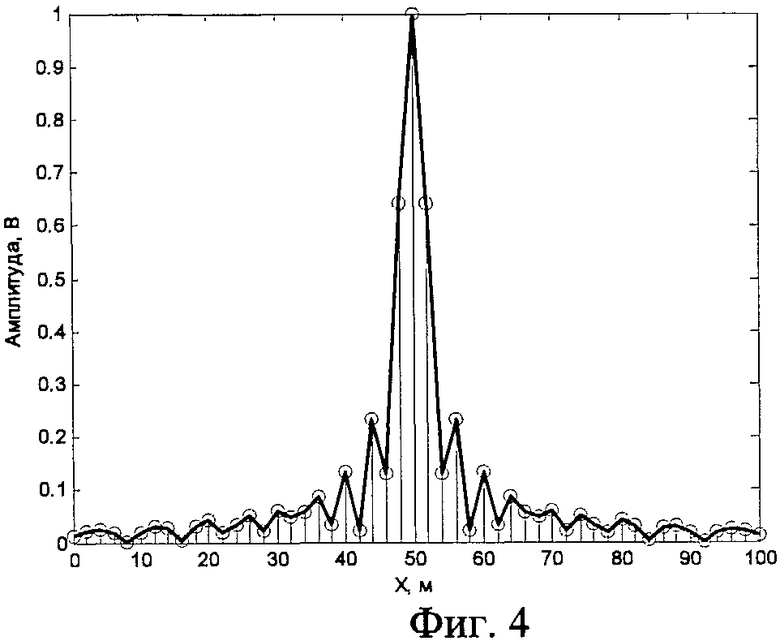
В результате моделирования рассчитывался сигнал, наблюдаемый на выходе антенны, состоящей из пяти приемных элементов, от точечного монохроматического излучателя, находящегося в различных точках прямолинейной траектории движения. В результате получена планарная диаграмма направленности для исходных сигналов (фиг.2). После умножения сигналов по частоте сформирована многолепестковая диаграмма направленности (фиг.3), ширина лепестков которой значительно уже ширины лепестка (фиг.2). В результирующей диаграмме направленности (фиг.4) боковые лепестки, положение которых не соответствует положению лепестка исходной диаграммы направленности, подавляются при перемножении диаграмм направленности. Таким образом, без изменения расстояния между приемными элементами антенны, обеспечивается сохранение частотного диапазона анализа при повышенном пространственном разрешении.
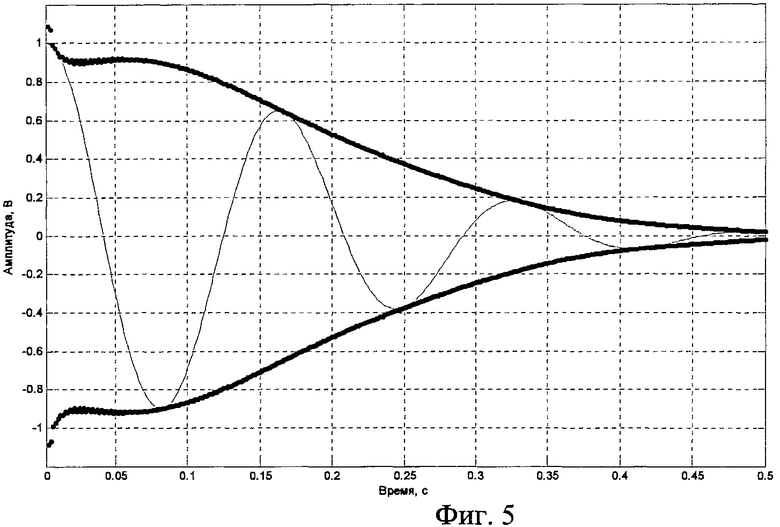
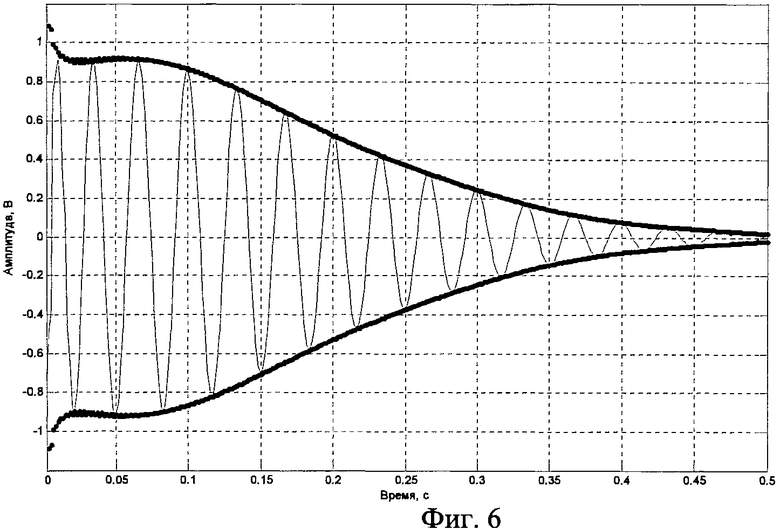
На фиг.5, 6 приведены примеры, показывающие возможность умножения сигналов по частоте при их представлении в виде узкополосных сигналов с использованием преобразования Гильберта. Для формирования узкополосных сигналов осуществляется их полосовая фильтрация.
Сравнение приведенных примеров показывает, что амплитудные огибающие сигналов (утолщенные кривые) до и после умножения сигналов по частоте практически идентичны, что позволяет использовать эту процедуру при практической реализации предлагаемого способа. В приведенном примере амплитудная огибающая сигнала имеет форму гауссова импульса с частотой несущей 6 Гц и коэффициентом умножения частоты 5.
Достоверность предлагаемого способа подтверждается результатами проведенного модельного эксперимента.
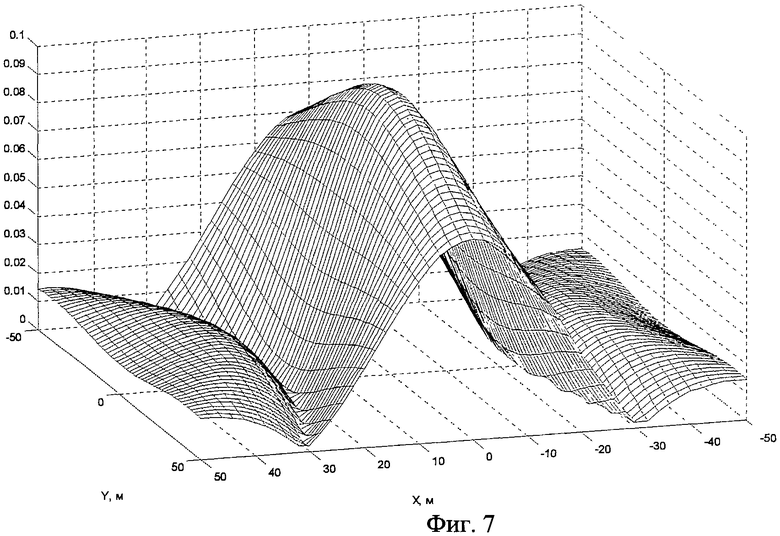
Источник тонального сигнала на частоте 1000 Гц перемещался в пределах плоскости, ограниченной размерами X=±50 м и Y=±50 м. Исследуемый сигнал принимался антенной из 5 приемных элементов, расстояние между которыми составляло 0,75 м. Дистанция между осью антенны и плоскостью, в которой перемещался источник, равнялась 50 м. Оценка амплитуды сигнала на выходе антенны производилась через каждые 2 м.
В результате совместного представления измерительных данных, полученных для различных точек плоскости расположения источника излучения, строилась планарная диаграмма направленности (фиг.7). При этих же условиях моделирования в соответствии с предлагаемым способом производилось умножение сигналов по частоте в 5 раз и последующее перемножение диаграмм направленности, полученных без умножения и с умножением сигналов по частоте. Результирующая диаграмма направленности приведена на фиг.8.
Сравнение диаграмм направленности (фиг.7, 8) показывает, что основное преимущество предлагаемого способа определения звукового давления перед способом-прототипом заключается в увеличении разрешающей способности пространственной локализации источников звука по длине транспортного средства без изменения апертуры антенны и числа приемных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АНАЛИЗА АКУСТИЧЕСКОГО ПОЛЯ СЛОЖНОГО ИСТОЧНИКА | 2013 |
|
RU2541682C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ ЗВУКОПОГЛОЩАЮЩЕЙ КОНСТРУКЦИИ | 2015 |
|
RU2625617C2 |
| СПОСОБ НАПРАВЛЕННОГО ПРИЕМА ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1990 |
|
SU1840431A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму | 2016 |
|
RU2626284C1 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| СПОСОБ ПОДАВЛЕНИЯ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ ПРИ ИЗМЕРЕНИИ АКУСТИЧЕСКИХ ХАРАКТЕРИСТИК АКТИВНОГО ПРОТИВОГИДРОЛОКАЦИОННОГО ПОКРЫТИЯ В ОГРАНИЧЕННОЙ АКВАТОРИИ | 2016 |
|
RU2647994C1 |
| АКУСТИЧЕСКИЙ ПАРАМЕТРИЧЕСКИЙ ПРИЕМНИК | 2010 |
|
RU2445642C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПЕЛЕНГОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1840092A1 |
Изобретение относится к области контрольно-измерительной техники, в частности к способу определения звукового давления движущегося протяженного источника акустического поля. Сущность: способ определения звукового давления движущегося протяженного источника акустического поля включает синхронный многоканальный прием гидроакустических сигналов при помощи линейной антенны из эквидистантных приемников, суммирование принятых сигналов, амплитудное детектирование суммарного сигнала и регистрацию результата амплитудного детектирования суммарного сигнала. При этом перед суммированием гидроакустических сигналов по каждому из каналов осуществляют их полосовую фильтрацию, в сигналах, отфильтрованных в полосах частот, умножают их мгновенные частоты на число эквидистантных приемников в линейной антенне, затем сигналы с умноженными мгновенными частотами суммируют, осуществляют амплитудное детектирование суммарного сигнала, и полученный сигнал умножают на сигнал, сформированный в результате детектирования суммы сигналов с исходными мгновенными частотами, после чего регистрируют результат умножения. Технический результат: увеличение разрешающей способности способа определения звукового давления с использованием направленного приема при постоянной апертуре антенны и без увеличения числа приемных элементов. 8 ил.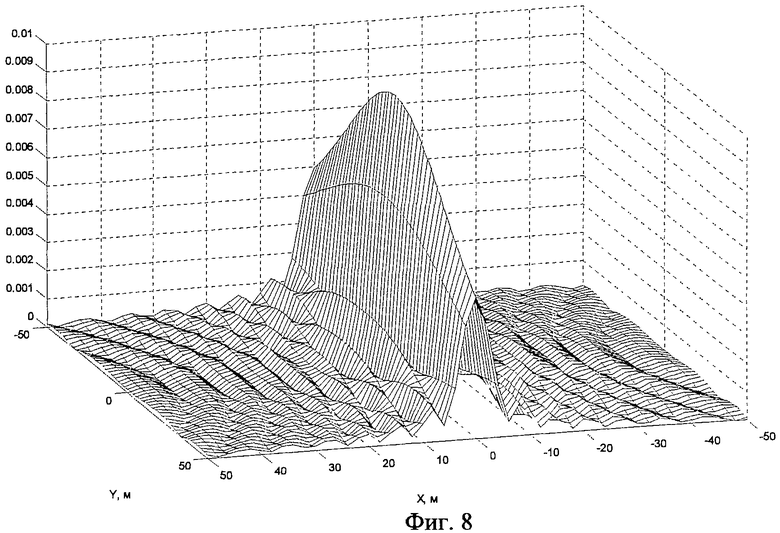
Способ определения звукового давления движущегося протяженного источника акустического поля, включающий синхронный многоканальный прием гидроакустических сигналов при помощи линейной антенны из эквидистантных приемников, суммирование принятых сигналов, амплитудное детектирование суммарного сигнала и регистрацию результата амплитудного детектирования суммарного сигнала, отличающийся тем, что перед суммированием гидроакустических сигналов по каждому из каналов осуществляют их полосовую фильтрацию, в сигналах, отфильтрованных в полосах частот, умножают их мгновенные частоты на число эквидистантных приемников в линейной антенне, затем сигналы с умноженными мгновенными частотами суммируют, осуществляют амплитудное детектирование суммарного сигнала и полученный сигнал умножают на сигнал, сформированный в результате детектирования суммы сигналов с исходными мгновенными частотами, после чего регистрируют результат умножения.
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ И ПРОСТРАНСТВЕННОГО РАСПОЛОЖЕНИЯ ИСТОЧНИКОВ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2092802C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2009 |
|
RU2414732C1 |
| US 5805525 A, 08.09.1998. | |||

