Изобретение относится к системам измерения с использованием отражения электромагнитных волн, а именно для измерения дальности, и может быть использовано в дальномерах, использующих непрерывные сигналы.
Известен способ измерения дальности до объекта, включающий импульсное зондирование объекта, прием отраженных от объекта зондирующих импульсов, формирование импульсов эталонной частоты, измерение расстояния до объекта по числу зондирующих импульсов и по числу импульсов эталонной частоты за время между посылкой зондирующего и приемом отраженного импульсов (Федоров Б.C. Лазеры и их применение, Москва, ДОСААФ, 1973, с.51) /1/.
Известен импульсный дальномер, содержащий приемопередающий тракт, последовательно соединенные генератор импульсов эталонной частоты, ключ, счетчик дальности, запоминающее устройство с индикатором, а также содержащий счетчик числа циклов измерений, выход которого подключен к другому входу запоминающего устройства с индикатором (Патент США №5968491, кл. G01S 9/04, 1976) /2/.
Недостатками известных способа и устройства является низкая информативность, заключающаяся в невозможности производить измерение дальности при применении непрерывного сигнала излучения.
Технической задачей изобретения является расширение информативности за счет обеспечения измерения дальности при использовании непрерывного сигнала излучения.
Сущность заявляемого способа измерения дальности до подвижного объекта состоит в том, что в способе измерения дальности, включающем зондирование объекта и прием отраженного сигнала, формирование импульсов эталонной частоты, измерение расстояния до объекта по числу импульсов эталонной частоты осуществляют первичное измерение дальности D0 путем фиксирования начала зондирования подвижного объекта непрерывным сигналом, принимают отраженный сигнал на частоте Доплера, подсчитывают число импульсов эталонной частоты за время от начала излучения непрерывного сигнала до прихода отраженного сигнала на частоте Доплера, измеряют через равные временные отрезки Δt частоту Доплера fd, определяют по значению частоты Доплера скорость сближения из выражения V=fd·λ/2, где λ - длина волны излучаемого сигнала, определяют дальность по подвижного объекта из выражения D=D0+n·V·Δt, где n - число временных интервалов Δt.
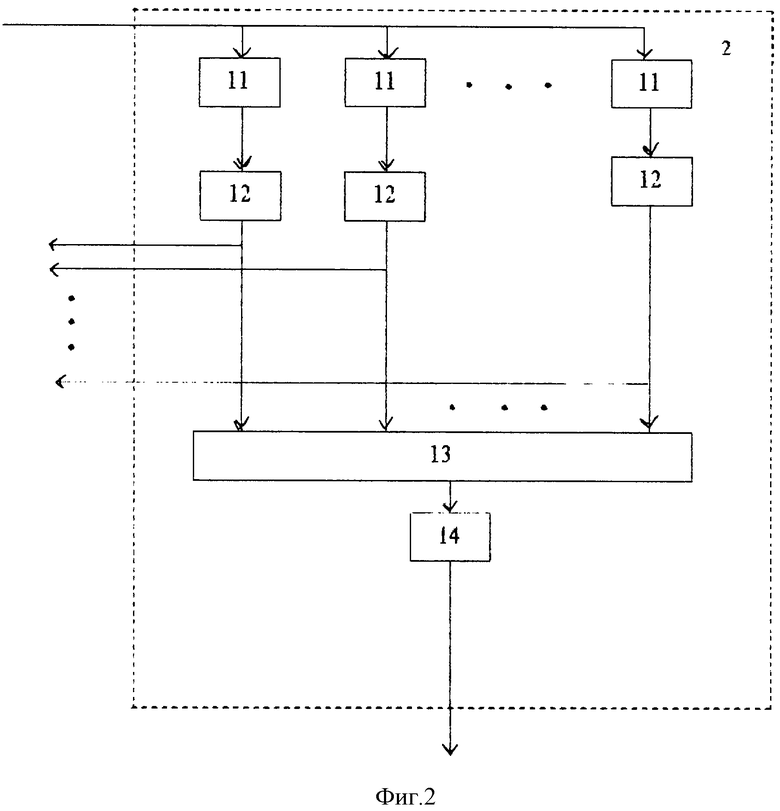
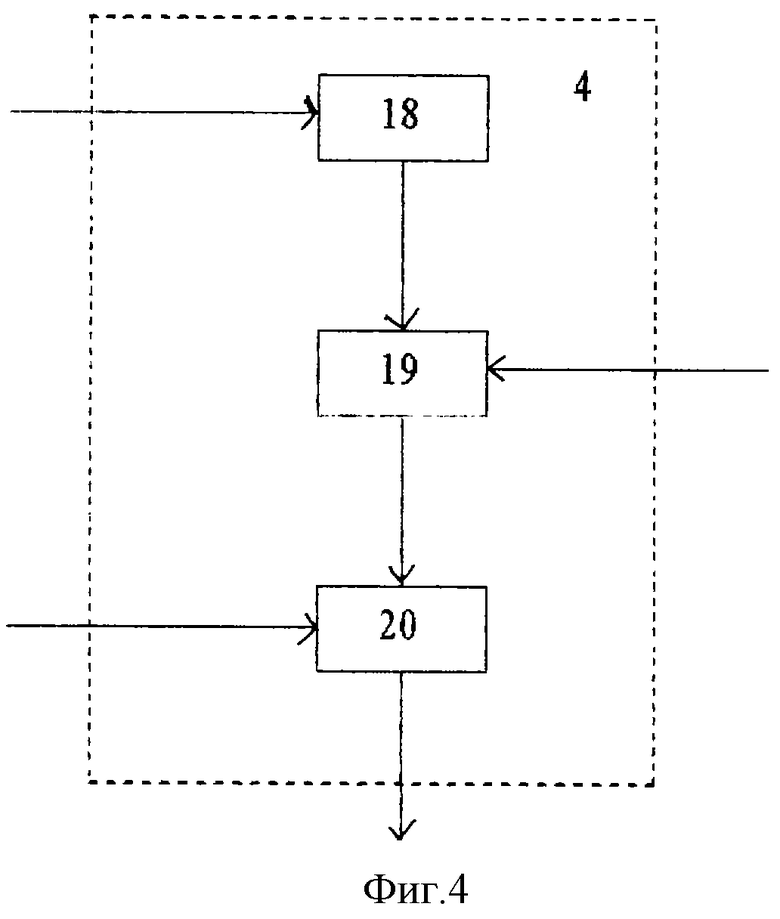
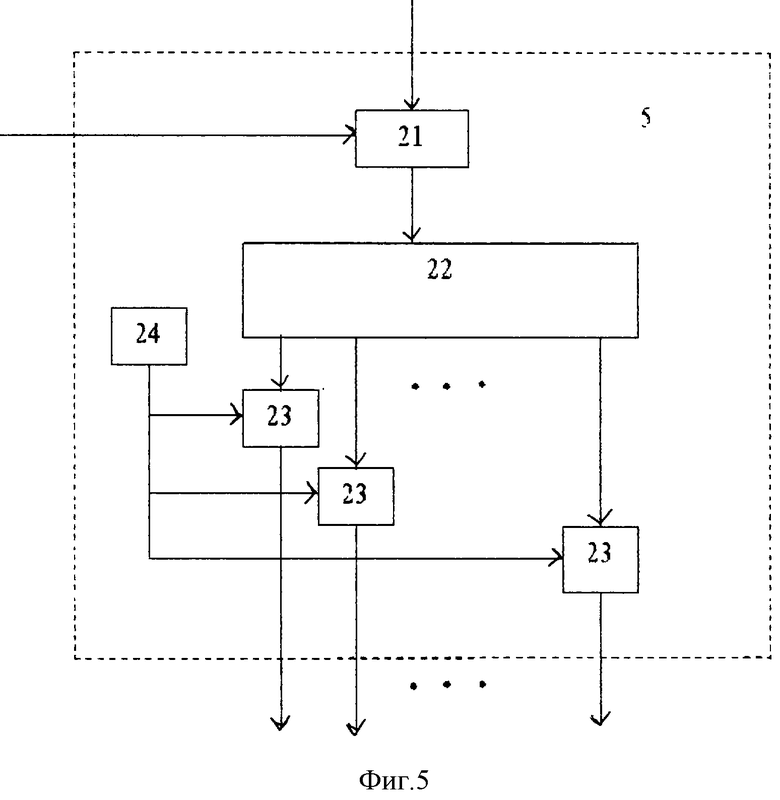
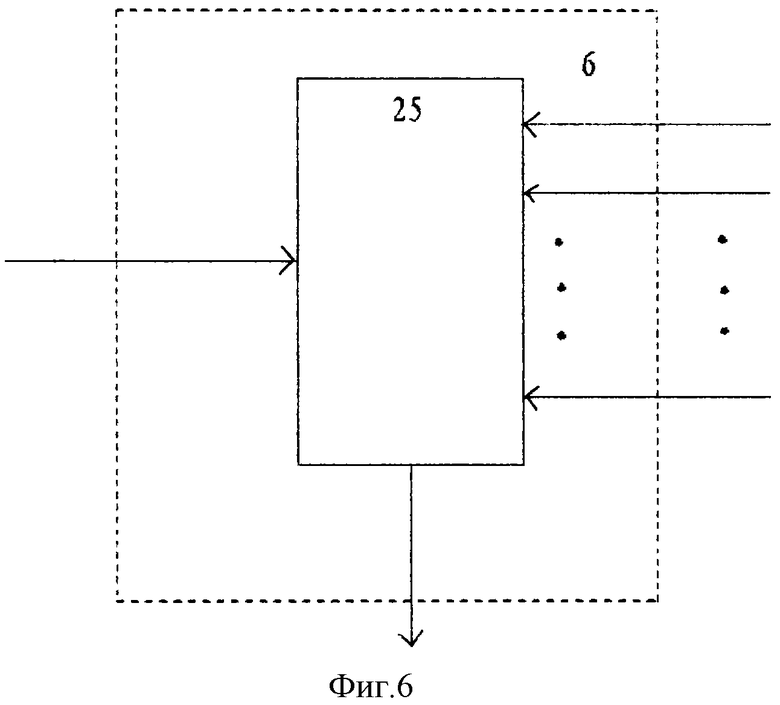
Устройство для осуществления способа измерения дальности до подвижного объекта, содержащее приемопередающий тракт, генератор импульсов эталонной частоты и запоминающее устройство, выход которого соединен с индикатором, дополнительно содержит блок обнаружения, блок определения скорости сближения, блок вычисления начальной дальности, блок определения временных интервалов, блок определения дальности, и сумматор, причем выход приемопередающего тракта соединен с входом блока обнаружения, первый выход которого соединен с первым входом соответственно блока вычисления начальной дальности и блока определения временных интервалов, второй выход блока обнаружения соединен с входом блока определения скорости сближения, выход которого соединен с входом блока определения дальности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом блока вычисления начальной дальности, а выход - с входом запоминающего устройства, выход генератора импульсов эталонной частоты соединен с вторым входом соответственно блока вычисления начальной дальности и блока определения временных интервалов, выход которого соединен с вторым входом блока определения дальности, второй выход приемопередающего тракта соединен с третьим входом блока вычисления начальной дальности, блок обнаружения содержит последовательно соединенные группу фильтров доплеровской частоты, группу пороговых устройств, сумматор и триггер, причем вход блока обнаружения соединен с входами группы фильтров доплеровской частоты, выходы группы пороговых устройств являются второй группой выходов блока обнаружения, выход триггера является первым выходом блока обнаружения, блок определения скорости сближения содержит группу задатчиков скорости, соединенных через группу ключей, с группой входов сумматора, выход которого является выходим блока определения скорости сближения, группа входов которого соединена с входами группы ключей, блок вычисления начальной дальности содержит последовательно соединенные триггер, ключ и счетчик, причем вход триггера является третьим входом блока вычисления начальной дальности, вход ключа является вторым входом блока вычисления начальной дальности, вход счетчика является первым входом блока вычисления начальной дальности, а выход счетчика является выходом блока вычисления начальной дальности, блок определения временных интервалов содержит ключ, первый вход которого соединен с первым, а второй со вторым входом блока определения временных интервалов, а выход с входом регистра, группа выходов которого соединена с первыми входами группы ключей, вторые входы которых соединены с выходом задатчика временных интервалов, а выходы являются группой выходов блока определения временных интервалов, блок определения дальности содержит умножитель, первый вход которого является первым входом блока определения дальности, вторая группа входов умножителя является второй группой входов блока определения дальности, группа выходов умножителя является группой выходов блока определения дальности.
Технический результат изобретения заключается в том, что в заявляемом способе и устройстве появляется возможность повысить информативность за счет измерения дальности до подвижного объекта при использовании непрерывного сигнала путем фиксирования момента начала излучения непрерывного сигнала и момента прихода отраженного сигнала на частоте Доплера, формирования импульсов эталонной частоты, измерения расстояния до объекта по числу импульсов эталонной частоты, осуществлении первичного измерения дальности D0, приеме отраженного сигнала на частоте Доплера, подсчете числа импульсов эталонной частоты за время от начала излучения непрерывного сигнала до прихода отраженного сигнала на частоте Доплера, измерении через равные временные отрезки Δt частоты Доплера fd, определении, по значению частоты Доплера, скорости сближения из выражения V=fd·λ/2, где λ - длина волны излучаемого сигнала, определении дальности до подвижного объекта из выражения D=D0+n·V·Δt, где n - число временных отрезков Δt.
На фиг.1 приведена структурная схема устройства измерения дальности до подвижного объекта, на фиг.2 - структурная схема блока обнаружения, на фиг.3 - структурная схема блока определения скорости сближения, на фиг.4 - структурная схема блока вычисления начальной дальности, на фиг.5 - структурная схема блока определения временных интервалов, на фиг.6 - структурная схема блока определения дальности.
Устройство для измерения дальности до подвижного объекта содержит приемопередающий тракт 1, генератор 7 импульсов эталонной частоты, запоминающее устройство 9, выход которого соединен с индикатором 10, блок обнаружения 2, блок определения скорости сближения 3, блок вычисления начальной дальности 4, блок определения временных интервалов 5, блок определения дальности 6, и сумматор 8, причем выход приемопередающего тракта 1 соединен и входом блока обнаружения 2, первый выход которого соединен с первым входом соответственно блока вычисления начальной дальности 4 и блока определения временных интервалов 5, второй выход блока обнаружения 2 соединен с входом блока определения скорости сближения 3, выход которого соединен с входом блока определения дальности 6, выход которого соединен с первым входом сумматора 8, второй вход которого соединен с выходом блока вычисления начальной дальности 4, а выход - с входом запоминающего устройства 9, выход генератора импульсов эталонной частоты 1, соединен с вторым входом соответственно блока вычисления начальной дальности 4 и блока определения временных интервалов 5, выход которого соединен с вторым входом блока определения дальности 6, второй выход приемопередающего тракта соединен с третьим входом блока вычисления начальной дальности 4, блок обнаружения 2 содержит последовательно соединенные группу фильтров доплеровской частоты 11, группу пороговых устройств 12, сумматор 13 и триггер 14, причем вход блока обнаружения 2 соединен с входами группы фильтров доплеровской частоты 11, выходы группы пороговых устройств 12 являются второй группой выходов блока обнаружения 2, выход триггера 14 является первым выходом блока обнаружения 2, блок определения скорости сближения 3 содержит группу задатчиков скорости 15, соединенных через группу ключей 16, с группой входов сумматора 17, выход которого является выходом блока определения скорости сближения 3, группа входов которого соединена с входами группы ключей 16, блок вычисления начальной дальности 4 содержит последовательно соединенные триггер 18, ключ 19 и счетчик 20, причем вход триггера 18 является третьим входом блока вычисления начальной дальности 4, вход ключа 19 является вторым входом блока вычисления начальной дальности 4, вход счетчика 20 является первым входом блока вычисления начальной дальности 4, а выход счетчика 20 является выходом блока вычисления начальной дальности 4, блок определения временных интервалов 5 содержит ключ 21, первый вход которого соединен с первым, а второй - со вторым входом блока определения временных интервалов 5, а выход - с входом регистра 22, группа выходов которого соединена с первыми входами группы ключей 23, вторые входы которых соединены с выходом задатчика временных интервалов 24, а выходы являются группой выходов блока определения временных интервалов 5, блок определения дальности 6 содержит умножитель 25, первый вход которого является первым входом блока определения дальности 6, вторая группа входов умножителя 25 является второй группой входов блока определения дальности 6, группа выходив умножителя 25 является группой выходов блока определения дальности 6.
Устройство функционирует следующим образом. С началом излучения непрерывного сигнала в сторону объекта, сигналом с выхода приемопередающего тракта 1, через третий вход блока вычисления начальной дальности 4, триггер 18 переводится в единичное состояние и открывает ключ 19. Сигналы с выхода генератора 7 импульсов поступают через второй вход блока вычисления начальной дальности и ключ 19 на счетный вход счетчика 20 дальности. Отраженный от подвижного объекта сигнал на частоте Доплера с выхода приемопередающего устройства 1 поступает на вход блока 2 обнаружения, где подается на вход группы фильтров доплеровской частоты 11. Обнаружение объекта происходит при превышении сигналом порога в пороговом устройстве группы пороговых устройств 12. Этот сигнал через сумматор 13 переводит триггер 14 в единичное состояние. Сигнал с триггера 14 через первый выход блока обнаружения 2 поступает на первый вход блока вычисления начальной дальности 4, где подается на вход счетчика 20 и прекращает его счет. На выходе счетчика 20 формируется код, пропорциональный начальной дальности до объекта D0. Этот код через выход блока вычисления начальной дальности 4 поступает на первый вход сумматора 8. Дальнейшее вычисление дальности до объекта происходит исходя из выражения D=D0+n·V·Δt. Скорость сближения V определяется в блоке определения скорости сближения исходя из выражения V=fd·λ/2, где λ - длина волны излучаемого сигнала. На вход блока определения скорости сближения 3 поступает сигнал со второго выхода блока обнаружения 2, по которому происходит срабатывание одного из группы ключей 16. На второй вход каждого ключа группы ключей 16 поступает сигнал с выхода задатчика скорости, группы задатчиков скорости 15. При срабатывании одного из ключей группы ключей 16 сигнал, пропорциональный скорости сближения V, через сумматор 17 поступает на выход блока определения скорости сближения 3. Блок определения дальности 6 определяет дальность исходя из выражения n·V·Δt, где n - число временных интервалов Δt. Число n временных интервалов Δt, определяется в блоке определения временных интервалов 5 следующим образом. При обнаружении объекта с первого выхода блока обнаружения 2 поступает сигнал на первый вход блока определения временных интервалов 5, который открывает ключ 21. Импульсы с выхода генератора импульсов 7 поступают через открытый ключ 21 на вход сдвигового регистра 22, на выходах которого формируется последовательность сигналов с периодом Δt. Значение n определяется номером выхода сдвигового регистра 22. Задатчик временного интервала 24 формирует код временного интервала, который поступает на первые входы группы ключей 23. При открывании одного из ключей группы ключей 23 код временного интервала поступает на выход блока определения временных интервалов 5. Этот код поступает на второй вход блока определения дальности 6, где подается на вход умножителя 25. На другой вход умножителя 25 поступает сигнал, пропорциональный скорости сближения V, с выхода блока определения скорости сближения 3. Таким образом, на выходе блока определения дальности формируется сигнал в соответствие с выражением n·V·Δt, который поступает на второй вход сумматора 8, где суммируется с сигналом, пропорциональным начальной дальности D0. На выходе сумматора формируется сигнал в соответствие с выражением D=D0+n·V·Δt. Этот сигнал запоминается в запоминающем устройстве 9 и индицируется индикатором 10.
Источники информации
1. Федоров Б.С. Лазеры и их применение, Москва, ДОСААФ, 1973, с.51 (прототип).
2. Патент США №3968491, кл. G01S 9/04, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО СКОРОСТИ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2359285C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ, ПРИНАДЛЕЖАЩИХ ОДНОЙ ЦЕЛИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410715C2 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2392639C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ЦЕЛИ | 2008 |
|
RU2411534C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2394255C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ПРИ ПОЛУАКТИВНОМ ПОДСВЕТЕ И ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2332686C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365941C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2472177C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО ДАЛЬНОСТИ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410713C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ МАЛОРАЗМЕРНОГО ВЫСОКОСКОРОСТНОГО ОБЪЕКТА ПРИ ПРОБИТИИ РАЗНЕСЕННЫХ ПРЕГРАД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2311661C2 |

Изобретение относится к системам измерения дальности с использованием отражения электромагнитных волн. Техническим результатом изобретения является повышение информативности измерения дальности при использовании непрерывного сигнала излучения. Определение дальности при использовании непрерывного сигнала излучения происходит посредством первичного измерения дальности D0 путем фиксирования начала зондирования подвижного объекта непрерывным сигналом, приема отраженного сигнала на частоте Доплера, подсчета числа импульсов эталонной частоты за время от начала излучения непрерывного сигнала до прихода отраженного сигнала на частоте Доплера, измерения через равные временные отрезки Δt частоты Доплера fd, определения по значению частоты доплера скорости сближения из выражения V=fd·λ/2, где λ - длина волны излучаемого сигнала, определения дальности до подвижного объекта из выражения D=D0+n·V·Δt, где n - число временных отрезков Δt. В схему устройства введены блок обнаружения, блок определения скорости сближения, блок вычисления начальной дальности, блок определения временных интервалов, блок определения дальности и сумматор. 2 н.п. ф-лы, 6 ил.
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2001 |
|
RU2206102C1 |
| Устройство для измерения дальности и скорости объектов | 1989 |
|
SU1661572A1 |
| JP 2004286766 А, 14.10.2004 | |||
| JP 4204189 A, 24.07.1992. | |||

