Предлагаемое изобретение относится к области радиолокации и может быть использовано для измерения координат, дальности и скорости импульсно-доплеровскими радиолокационными станциями (РЛС).
В современной радиолокации выделяют когерентные сигналы с высокой, средней и низкой частотой повторения импульсов.
В отличие от РЛС с высокой частотой повторения (ВЧП), в которых доплеровский сдвиг несущей частоты меньше частоты повторения и отсутствует неоднозначность по доплеровской частоте (скорости), и от РЛС с низкой частотой повторения (НЧП), в которых время задержки отраженных от цели сигналов меньше периода повторения и отсутствует неоднозначность по времени задержки (дальности), в РЛС со средней частотой повторения (СЧП) неоднозначно измеряются и доплеровская частота, и время задержки.
Предлагаемое изобретение может быть эффективно использовано в РЛС с высокой и средней частотой повторения импульсов.
Неоднозначности по какой-либо координате возникают из-за того, что координата может быть измерена лишь в долях периода повторения Ti (для времени задержки) или долях частоты повторения Fi (для доплеровской частоты), а диапазон изменения значений соответствующей координаты может многократно превышать Ti или Fi. Поэтому для измерения координат излучают несколько пачек сигналов с различными значениями частоты повторения в каждой пачке и по неоднозначным координатам, измеренным при приеме каждой пачки, вычисляют однозначные координаты целей - дальность и скорость.
Известны способы [1, стр.378, 382] определения однозначных кординат в режиме ВЧП для одиночной цели в луче антенны РЛС. Эти же способы применимы для нескольких целей, если их скорости различаются, так как это позволяет выделить сигналы, отраженные от определенной цели при различных частотах повторения, по признаку равенства доплеровской частоты сигнала при различных частотах повторения. Если же скорости целей одинаковы (групповая цель), то возможны "bа" различных решений, где "b" - число целей в луче антенны РЛС, "а" - число используемых частот повторения из-за невозможности отождествить сигналы, принадлежащие одной цели.
Задача еще больше усложняется при СЧП, когда не только время задержки, но и доплеровская частота каждой цели изменяется при изменении частоты повторения.
Наиболее близким по технической сущности к предлагаемому способу измерения дальности и скорости импульсно-доплеровской радиолокационной станцией является способ, изложенный в [2], основанный на определении однозначной скорости как координаты, порядок неоднозначности которой меньше, путем сравнения всех возможных неоднозначных доплеровских частот при различных частотах повторения и выделения равных (с точностью до ожидаемых ошибок измерения) для отождествления сигналов, отраженных от одной и той же цели. После этого задача сводится к измерению координаты дальности одиночной цели, рассмотренному в [1].
Недостатками этих способов являются необходимость хотя бы одну из координат (скорость) определять для всевозможных сочетаний отсчетов при различных частотах повторения, невозможность определения координат дальности до целей в группе при одинаковой скорости целей, повышение вероятности ложного измерения координат, вызванного отождествлением отсчетов от конкретной цели лишь по одной из координат.
Технический эффект предлагаемого изобретения состоит в достижении возможности измерения координат дальности и скорости при наличии в луче импульсно-доплеровской РЛС нескольких целей, разрешенных хотя бы по одной из координат, и в присутствии мешающих сигналов, создающих ложные отсчеты неоднозначных координат.
Технический эффект достигается тем, что в предлагаемом способе измерения дальности и скорости импульсно-доплеровской РЛС, основанном на том, что излучают пачки импульсов с изменяемой от пачки к пачке частотой повторения из фиксированного заранее рассчитанного набора частот повторения, измеряют неоднозначные значения времени запаздывания и доплеровского сдвига частоты сигналов, полученные после приема каждой пачки импульсов, и определяют по этим значениям однозначные координаты целей, согласно изобретению частоты повторения Fi и Fк выбирают попарно относящимися друг к другу как взаимно простые числа m и n, полученные неоднозначные координаты представляют в соответствующих единицах измерения - доплеровскую частоту для данной пары в единицах Fi/m, а время запаздывания в единицах 1/(Fi.n), сравнивают дробные части соответствующих координат при одной и другой частотах повторения у всех неоднозначных отсчетов и при совпадении дробных частей с точностью до наперед заданных значений ошибок измерения классифицируют эти координаты как принадлежащие одной и той же цели, после попарного сравнения данных, полученных при всех частотах повторения, координаты каждой цели собирают в отдельную группу и определяют однозначные координаты каждой цели.
На фиг.1 изображена блок-схема импульсно-доплеровской РЛС со средней частотой или высокой частотой повторения импульсов, реализующая предлагаемый способ.
Импульсно-доплеровская РЛС со средней или высокой частотой повторения импульсов состоит из антенны 1, синхронизатора 2, передающего устройства 3, коммутатора прием-передача 4, многоканального приемного устройства 5, вычислителя отождествления данных, относящихся к одной и той же цели при различных частотах повторения 6, вычислителя однозначных координат 7.
Синхронизатор 2 последовательно соединен с передающим устройством 3, выход которого через коммутатор прием-передача 4 подключен к антенне 1, а выход антенны 1 через коммутатор прием-передача 4 - к многоканальному приемному устройству 5, выход которого в свою очередь соединен с вычислителем отождествления данных, относящихся к одной и той же цели при различных частотах повторения 6, выход которого подключен к вычислителю однозначных координат 7.
В синхронизаторе 2 формируются сигналы с заранее рассчитанными значениями частоты повторения и после усиления в передающем устройстве 3 через антенну 1 излучаются в окружающее пространство. Отраженные от различных объектов сигналы обрабатывают многоканальным по времени запаздывания и доплеровской частоте приемным устройством 5 и в виде пар отсчетов τн и fн заносят в регистр неоднозначных координат многоканального приемного устройства. В вычислителе 6 отождествления данных, относящихся к одной и той же цели при различных частотах повторения, отсчеты от разных целей, полученные при различных частотах повторения, группируют по принадлежности к определенной цели и после этого в вычислителе однозначных координат 7 рассчитывают координаты дальности и скорости одиночной цели.
Работа устройства измерения дальности и скорости импульсно-доплеровской радиолокационной станцией происходит следующим образом: рассчитывают набор частот повторения импульсов так, чтобы частоты повторения попарно относились друг к другу как взаимно простые числа
Fi/Fk=m/n,
где Fi и Fk - две частоты повторения из набора,
m и n - целые числа, не имеющие общих множителей.
Как видно из рассматриваемого ниже примера, чем меньше числа m и n, тем большее число целей или ложных сигналов может быть успешно обработано.
Отраженные от цели сигналы с различными временем задержки и доплеровским смещением, а также мешающие сигналы в многоканальном приемном устройстве селектируются по времени в каналах дальности и в каждом канале обрабатываются многоканальным по частоте доплера фильтром, и если принятый сигнал в каком-либо канале превосходит пороговое значение, он заносится в виде пары отсчетов - неоднозначного времени задержки τн и неоднозначного доплеровского смещения частоты fн для данной частоты повторения.
На следующем этапе обработки в устройстве 7 отождествления данных, относящихся к одной и той же цели при различных частотах повторения, из этих пар отсчетов, которых на каждой частоте повторения может быть много, выделяют отсчеты, принадлежащие одной и той же цели. Для этого образуют столько регистров памяти, сколько пар в наборе частот повторения Fi и Fk, для которых Fi/Fk=m/n, на каждой из частот повторения Fi и Fk. Отсчеты координат расчитываются в единицах Fi/m для доплеровских частот и в единицах 1/(Fi.n) для времени запаздывания. При этом отсчеты по соответствующим координатам и по дальности, и по скорости при обеих частотах повторения для одной и той же цели будут иметь равные дробные части (с точностью до наперед заданных ошибок измерения), что позволяет для рассматриваемой пары частот повторения разделить отсчеты по принадлежности к определенным целям.
Отсчеты координат с выхода многоканального приемника 5 фигурируют сразу в нескольких парах частот повторения вычислителя отождествления данных, относящихся к одной и той же цели при различных частотах повторения 6, сравниваясь с другими отсчетами при различных сочетаниях частот повторения. Это позволяет объединить в одну группу все отсчеты, принадлежащие определенной цели, и затем расчитать однозначные координаты каждой цели.
Поясним вышеизложенное конкретным примером.
Пусть используется набор частот
F1 = 12 кГц, F2 = 15 кГц, F3 = 18 кГц.
Для этого набора:
F1/F2 = 12 кГц/15 кГц = 4/5, m = 4, n = 5,
F2/F3 = 15 кГц/18 кГц = 5/6, m = 5, n = 6,
F1/F3 = 12 кГц/18 кГц = 2/3, m = 2, n = 3.
Предположим, что координаты целей:
Цель 1
fд = 40 кГц
τзад = 0,4 мс
Цель 2
fд = 21 кГц
τзад = 0,41 мс
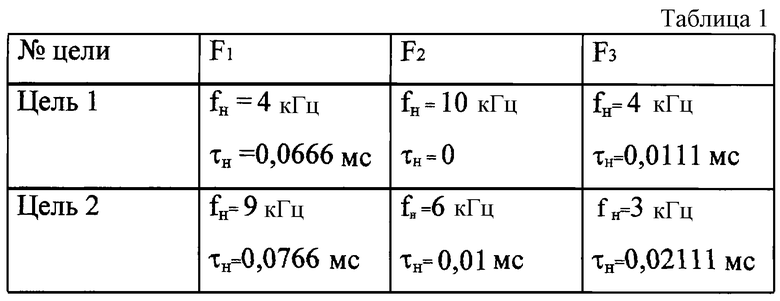
Легко подсчитать, что неоднозначные координаты этих целей на выходе многоканального приемника при разных частотах повторения будут (см. табл.1).
Единицы измерения f и τ для каждой пары частот:
F1 F2: m = 4, n = 5,
для fн Δf = F1/m = 12 кГц/4 = 3 кГц;
для τн Δτ = 1/(Fi.n) = 1/(12.5)=)0,0166 мс;
F2 F3: m = 5, n = 6,
для fн Δf = F2/m = 15/5 = 3 кГц;
для τн Δτ = 1/(F2.n) = 1/(15,6)=0,0111 мс;
F1 F3: m = 2, n = 3,
для fн Δf = F1/m = 12 кГц/2 = 6 кГц;
для τн Δτ = 1/(F1.n) = 1/(12,3)=0,0185185 мс.
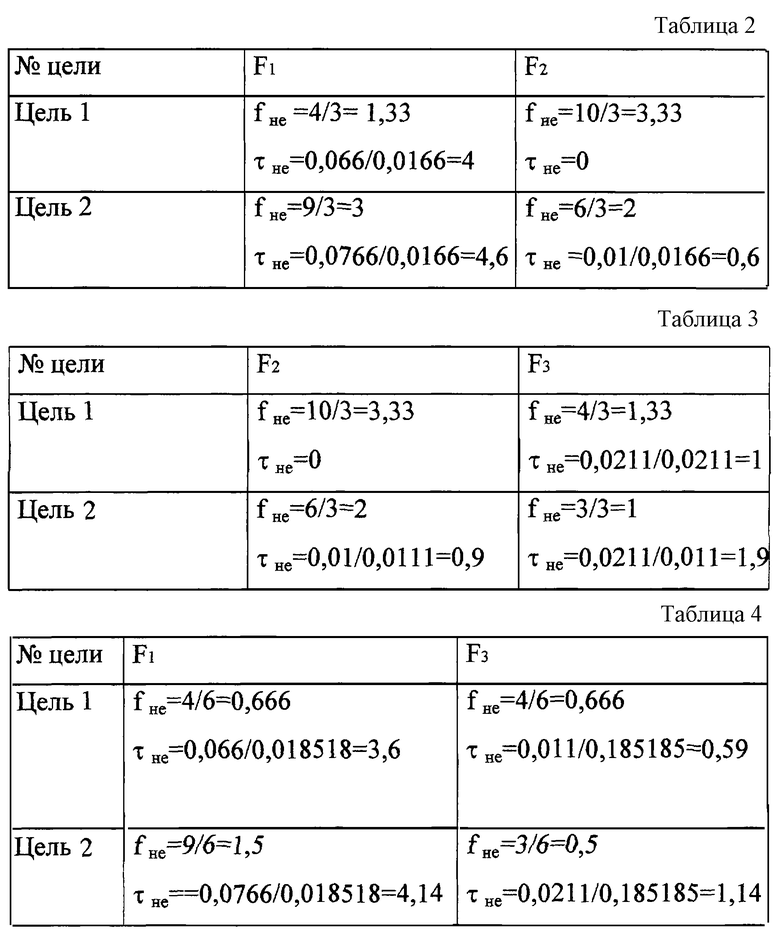
Рассчитанные в своих для каждой пары частот единицах неоднозначные координаты Fне не и τне имеют значения (см. табл. 2, 3, 4).
Принадлежащие одной и той же цели отметки при разных частотах повторения в каждой паре частот, выраженные в соответствующих единицах, имеют равные дробные части по каждой из координат fд и τзад. Если измерения неоднозначных координат производятся с ошибками, то очевидно равенство будет выполняться приблизительно, с точностью до наперед заданных ошибок измерения.
Если в рассмотренном примере эти ошибки в килогерцах и миллисекундах составляют 0,3 кГц и 10-3 мс, то в принятых условиях измерения для различных пар частот эта ошибка будет иметь различные значения, не превосходящие однако для всех пар значений
0,3/Δfmin=0,3 кГц/3 кГц=0,1 и
10-3/Δτmin=10-3 мс/0,011 мс=0,09
Это значит, что с учетом ошибок измерения отметки по крайней мере от 10 целей будут иметь по каждой из координат τзад и fд отличающиеся дробные части, то есть цели могут быть раздельно идентифицированы.
Вероятность случайного совпадения дробных частей на обеих частотах повторения в каждой паре для хаотического сигнала сразу по τзад и fд менее 1%, а одновременно для нескольких пар ничтожно мала.
Это обстоятельство объясняет устойчивость способа измерения к воздействию мешающих сигналов, являющихся причиной появления случайных значений неоднозначных координат.
Источники информации
1. Справочник по радиолокации. /Под редакцией М. Сколника. Том 3. - М.: Советское радио, 1979 г.
2. Редди Н.С., Свейми М.Н.С. Устранение неоднозначности по дальности и доплеровскому смещению частоты в РЛС со средней частотой повторения импульсов при наличии многочисленных целей, перевод Л-46681, Всесоюзный центр переводов, Москва, 1985 г.
Предлагаемое изобретение относится к радиолокации и может быть использовано для измерения координат дальности и скорости импульсно-доплеровскими радиолокационными станциями. Способ основан на излучении пачек импульсов с изменяемой от пачки к пачке частотой повторения из фиксированного заранее рассчитанного набора частот повторения, измерении неоднозначных значений времени запаздывания и доплеровского сдвига частоты сигналов, полученных после приема каждой пачки импульсов, и определении по этим значениям однозначных координат целей, при этом частоты повторения Fi и Fk выбирают попарно относящимися друг к другу как взаимно простые числа m и n, полученные неоднозначные координаты представляют в соответствующих единицах измерения - доплеровскую частоту для данной пары в единицах Fi/m, а время запаздывания в единицах 1/(Fi. n), сравнивают дробные части соответствующих координат при одной и другой частотах повторения у всех неоднозначных отсчетах и при совпадении дробных частей с точностью до наперед заданных значений ошибок измерения классифицируют эти координаты как принадлежащие одной и той же цели, после попарного сравнения данных, полученных при всех частотах повторения, координаты каждой цели собирают в отдельную группу и определяют однозначные координаты каждой цели. Достигаемым техническим результатом является измерение координат дальности и скорости нескольких целей при наличии мешающих сигналов. 1 ил.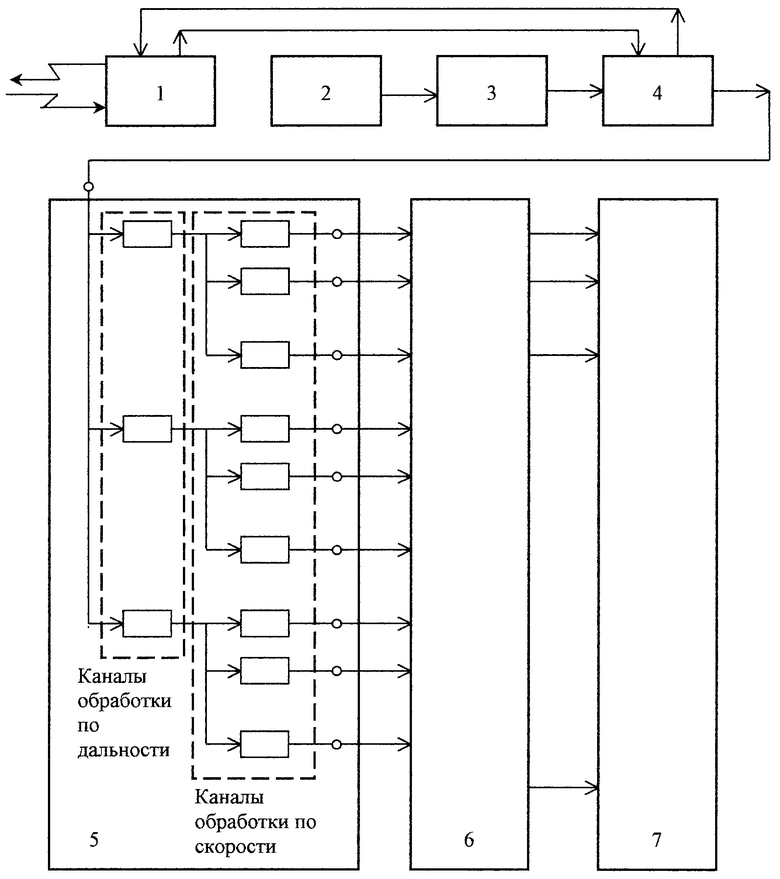
Способ измерения дальности и скорости импульсно-доплеровской радиолокационной станцией, основанный на излучении пачек импульсов с изменяемой от пачки к пачке частотой повторения из фиксированного заранее рассчитанного набора частот повторения, измерении неоднозначных значений времени запаздывания и доплеровского сдвига частоты сигналов, полученных после приема каждой пачки импульсов, и определении по этим значениям однозначных координат целей, отличающийся тем, что частоты повторения Fi и Fk выбирают попарно относящимися друг к другу как взаимно простые числа m и n, полученные неоднозначные координаты представляют в соответствующих единицах измерения - доплеровскую частоту для данной пары в единицах Fi/m, a время запаздывания в единицах l/(Fi. n), сравнивают дробные части соответствующих координат при одной и другой частотах повторения у всех неоднозначных отсчетов и при совпадении дробных частей с точностью до наперед заданных значений ошибок измерения классифицируют эти координаты как принадлежащие одной и той же цели, после попарного сравнения данных, полученных при всех частотах повторения, координаты каждой цели собирают в отдельную группу и определяют однозначные координаты каждой цели.
| РЕДДИ Н.С., СВЕЙМИ М.Н.С | |||
| Устранение неоднозначности по дальности и доплеровскому смещению частоты в РЛС со средней частотой повторения импульсов при наличии многочисленных целей | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ТИГЕЛЬНОЙ ПЛАВКИ МЕТАЛЛОВ | 1935 |
|
SU46681A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ГЕОЛОГИЧЕСКОГО РАЗРЕЗА | 1999 |
|
RU2144682C1 |
| US 4430653, 07.02.1984 | |||
| US 5280284 А, 18.01.1994. | |||

