Изобретение относится к системам и способам сканирования и копирования преимущественно для объектов в переплете.
При сканировании объекта в переплете практически невозможно получить отсканированное изображение без искажений геометрических параметров (дисторсии) и затемнения текста в области переплета. В связи с этим в настоящее время актуальна проблема коррекции искажений в отсканированных изображениях, особенно в текстовых, в частности, с целью последующего распознавания текста, поскольку системы распознания текста могут работать только с неискаженным изображением текста.
При сканировании объектов в переплете, например книг, или объектов с неровной поверхностью искажения в отсканированном изображении объекта, а именно дисторсия и затемнение текста возникают в основном в области переплета и вызваны неплотным прилеганием поверхности сканируемого объекта к подложке сканера, вдоль которой сканируется объект.
Существуют различные способы устранения указанных выше искажений, возникающих при сканировании. Способы устранения искажений делятся на аппаратные, в которых воздействуют на сам сканируемый объект, и алгоритмические, которые основаны на коррекции отсканированного изображения объекта.
В аппаратных способах в основном используются различные механические приспособления, позволяющие плотно прижать сканируемый объект к подложке, вдоль которой он сканируется. При этом существует опасность повреждения объекта. В алгоритмических системах и способах, к которым относится заявленное изобретение, области с искажением определяют либо путем анализа отсканированного изображения объекта, либо на основе данных дополнительных сенсоров, определяющих высоту зазора между сканируемым объектом и подложкой сканера. Причем во многих случаях применение дополнительных сенсоров требует двойного прохода сканирующей системы вдоль документа, что увеличивает время сканирования.
В патенте США №6330050 описано устройство для коррекции искажений, возникающих в районе переплета открытой книги при сканировании. Устройство содержит средство сканирования, память, средство коррекции искажений, выполненное с возможностью определения области искажений в отсканированном изображении объекта в районе переплета книги без применения дополнительных детекторов расстояния и коррекции изображения. Недостатком устройства является низкая точность определения области искажений и корректирующая способность, кроме того, устройство предполагает использование значительных ресурсов памяти.
В опубликованной заявке США №2002/0085248 предложен способ коррекции отсканированного изображения, в котором сканируют неровный объект. В способе определяют данные отсканированного изображения объекта, анализируют данные отсканированного изображения объекта, при этом определяют области искажений, возникающие в неровных местах, где объект неплотно прилегает к подложке сканера, и данные для корректировки области искажений изображения объекта. После чего восстанавливают яркость изображения в области искажений, используя данные для корректировки. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатком прототипа является низкая точность определения областей искажений изображения и невозможность корректировки геометрических искажений и резкости изображения объекта, возникающих в областях искажений. Кроме того, способ прототипа не позволяет определять области искажений изображения объекта и данные для корректировки области искажений непосредственно при сканировании, что увеличивает время выполнения способа.
Задачей заявленного изобретения является создание системы и способа сканирования и копирования преимущественно для объекта в переплете, позволяющих осуществлять высокоскоростную коррекцию геометрических искажений объекта в области переплета при максимальном использовании стандартного офисного оборудования типа сканеров и цифровых фотокамер.
Технический результат достигается за счет использования такой системы, которая содержит связанные между собой шиной данных сканер, цифровую камеру, процессор, блок памяти программ, блок памяти данных и внешнее отображающее устройство, при этом сканер имеет подложку, на которой размещается и вдоль которой сканируется объект, а цифровая камера расположена на одной из боковых сторон сканера таким образом, что объектив камеры направлен на торец переплета в месте изгиба раскрытых страниц, блок памяти программ содержит средство коррекции, выполненное с возможностью установления параметров и способа коррекции изображения, процессор имеет модуль коррекции искажений, выполненный с возможностью анализа снимка объекта, полученного с камеры, а также коррекции искажений отсканированного изображения объекта вблизи переплета путем определения и обработки данных, характеризующих форму изгиба страниц объекта вблизи переплета в соответствии с параметрами и способом коррекции.
Для функционирования системы существенно, чтобы сканер был планшетным.
Для функционирования системы важно, чтобы подложка сканера была выполнена из стекла или другого прозрачного материала.
Для функционирования системы необходимо, чтобы объект сканирования размещался на подложке в развернутом виде, причем страницы объекта были прижаты к подложке.
Для функционирования системы существенно, чтобы объект сканирования размещался на подложке сканера таким образом, чтобы края страниц объекта были расположены параллельно границам подложки сканера.
Для функционирования системы имеет смысл, чтобы рядом с камерой было расположено, по меньшей мере, одно осветительное устройство, выполненное с возможностью включения во время съемки для освещения объекта со стороны камеры.
Для функционирования системы важно, чтобы камера была встроена в корпус сканера или подсоединялась к сканеру на момент сканирования объекта.
Для функционирования системы существенно, чтобы оптическая ось камеры была расположена под углом от 0 до 60 градусов к плоскости подложки сканера.
Для функционирования системы необходимо, чтобы в качестве внешнего устройства система содержала, по меньшей мере, одно устройство, выбранное из группы, включающей монитор, принтер, компьютер или другие аналогичные устройства.
Поставленная задача достигается также путем создания способа сканирования и копирования, который включает в себя следующие операции:
- снимают цифровой камерой торцевую часть объекта;
- записывают полученный снимок торцевой части объекта в блок памяти данных;
- анализируют в модуле коррекции искажений процессора наличие искажений в записи снимка в соответствии с параметрами, полученными из средства коррекции, при этом определяют имеет ли объект искажения вблизи переплета, в случае если объект не имеет искажений вблизи переплета, сканируют объект сканером и выводят изображение объекта на внешнее устройство, в случае если объект имеет искажения вблизи переплета, определяют и сохраняют в блоке памяти данных параметры, характеризующие форму изгиба страниц объекта вблизи переплета;
- сканируют объект сканером;
- записывают отсканированное изображение объекта в блок памяти данных;
- корректируют в модуле коррекции искажений искажения отсканированного изображения объекта, сохраненного в блоке памяти данных, в соответствии с параметрами и способом коррекции, установленными в средстве коррекции, при этом используют данные, характеризующие форму изгиба страниц объекта вблизи переплета;
- записывают скорректированное отсканированное изображение объекта в блок памяти данных и выводят его на внешнее устройство.
Для функционирования способа существенно, чтобы объект снимали цифровой камерой, при этом освещали объект, по меньшей мере, одним осветительным устройством со стороны камеры.
Для функционирования способа важно, чтобы снимок объекта, сохраненный в блоке памяти данных, анализировали в модуле коррекции искажений процессора, при этом вводили систему координат кадра объекта, снятого камерой XсZc, ось Хс которой направлена параллельно, а ось Zc - перпендикулярно подложке, в системе координат кадра объекта, снятого камерой, задавали массив точек на подложке сканера, отстоящих друг от друга на равное расстояние, и определяли координаты {xc(i)} каждой точки массива на подложке сканера, для всех точек массива с координатами {xc(i)} определяли массив расстояний {h(i)} от каждой точки на подложке сканера zc=0 до ее проекции на странице объекта, в результате получали массив пар точек {xc(i), h(i)}, определяли координату xс0, соответствующую максимуму массива расстояний (абсциссу максимума):
xc0:h(xc0)=max{h(i)},
анализировали характер массива {xc(i), h(i)} слева и справа от xc0 и определяли имеет ли объект искажения вблизи переплета или нет.
Для функционирования способа существенно, чтобы при наличии у объекта искажений вблизи переплета определяли данные, характеризующие форму изгиба страниц объекта вблизи переплета, при этом массив {xc(i), h(i)} преобразовывали в два массива координат {xc(j), zca(j)} и {xc(j), zcb(j)}, вводили систему координат сканера XsZs, оси которой совпадают с осями системы координат кадра объекта, снятого камерой XcZc, массивы координат {xc(j), zca(j)} и {xc(j), zcb(j)} преобразовывали (конвертировали) в систему координат сканера XsZs:
где  согласует разрешение камеры и сканера по оси X, d согласует разрешение камеры и сканера по оси Z, а также учитывали угол наклона камеры к подложке, где tx переносит начало системы координат, в результате получали массивы координат {xsa(j), zsa(j)} из n элементов и {xsb(j), zsb(j)} из m элементов, определяющие форму изгиба страниц объекта вблизи переплета.
согласует разрешение камеры и сканера по оси X, d согласует разрешение камеры и сканера по оси Z, а также учитывали угол наклона камеры к подложке, где tx переносит начало системы координат, в результате получали массивы координат {xsa(j), zsa(j)} из n элементов и {xsb(j), zsb(j)} из m элементов, определяющие форму изгиба страниц объекта вблизи переплета.
Для функционирования способа важно, чтобы корректировали в модуле коррекции искажений процессора искажения отсканированного изображения объекта, при этом корректировали дисторсию и тень в области изгиба страниц изображения объекта.
Для функционирования способа необходимо, чтобы корректировали в модуле коррекции искажений искажения отсканированного изображения объекта, при этом использовали кусочно-линейную интерполяцию по массивам координат {xsa(j), zsa(j)} и {xsb(j), zsb(j)}, полагали, что количество пикселов каждой строки скорректированного отсканированного изображения объекта превосходит количество пикселов отсканированного изображения на величину Delta, которую задавали следующей зависимостью:
Delta=round(La+Lb-(xsb(m)-xsa(n))),
где round - функция округления до ближайшего целого, La и Lb - суммарные длины интерполирующих отрезков, что соответствует количеству пикселов изогнутых частей страниц, при этом La и Lb задают следующей зависимостью:


для коррекции дисторсии вдоль интерполированной кривой, образованной сечением изогнутой поверхности страницы объекта, отсчеты выбирали с шагом в единицу длины системы координат сканера, в результате чего определяли соответствующую координату xs', по которой из сканированного изображения вычисляют значения цветовых составляющих R'G'B' скорректированного изображения путем линейной интерполяции по значениям цветовых составляющих пикселов RGB сканированного изображения с координатами floor(xs') и floor(xs')+1, где floor - функция взятия целой части:
R'=R(floor(xs'),y)+(xs'-floor(xs'))*R(floor(xs')+1,y),
для значения G' и В' вычисляли аналогично, текущие координаты отсчетов (xs', zs') вдоль интерполированной отрезками кривой вычисляют по параметрическим уравнениям отрезков прямой от точки с координатами (xsa(i), zsa(i)) до (xsa(i-1), zsa(i-1)), i=2...n:
xs'=xsa(i)+t*(xsa(i-1)-xsa(i)),
zs'=zsa(i)+t*(zsa(i-1)-zsa(i)),
где t=0 в начале отрезка (точка (xsa(i), zsa(i)), t=1 в конце отрезка (точка (xsa(i-1), zsa(i-1)), а шаг изменения t задавали выражением:

вычисления текущих координат отсчетов (xs', zs') вдоль интерполированной кривой для массива {xsb(j), zsb(j)} производили аналогично, устанавливали экспериментально усредненную зависимость яркости искаженного пиксела от яркости исходного пиксела и расстояния до проекции этого пиксела на странице от подложки сканера, далее эту зависимость преобразовывали в функцию коррекции искажений отсканированного изображения объекта, учитывающую также и разрешение сканирования:
Y'(x,у)=f(Y(xs',у),zs'),
где Y'(x, у) - яркость скорректированного пиксела, Y(xs', y) - яркость пиксела сканированного изображения, zs' - расстояния до страницы от подложки сканера в xs'.
Для функционирования способа существенно, чтобы в модуле коррекции корректировали искажения отсканированного изображения объекта, при этом корректировали искажения в каждой строке сканированного изображения независимо от других строк.
Для более глубокого понимания заявленного изобретения далее приводятся его подробное описание и чертежи.
Фиг.1. Блок-схема системы сканирования и копирования согласно изобретению.
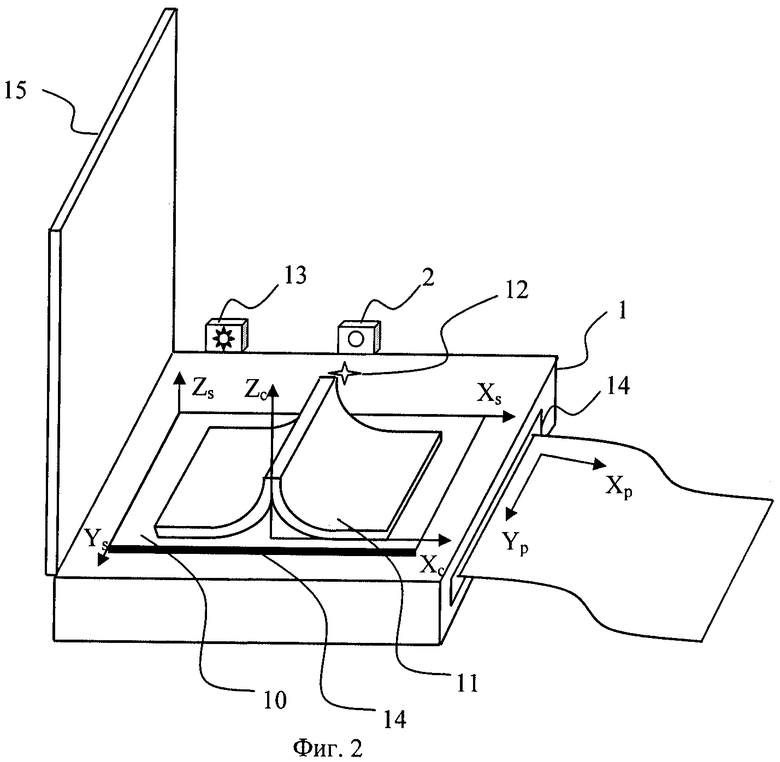
Фиг.2. Возможный внешний вид системы сканирования и копирования согласно изобретению.
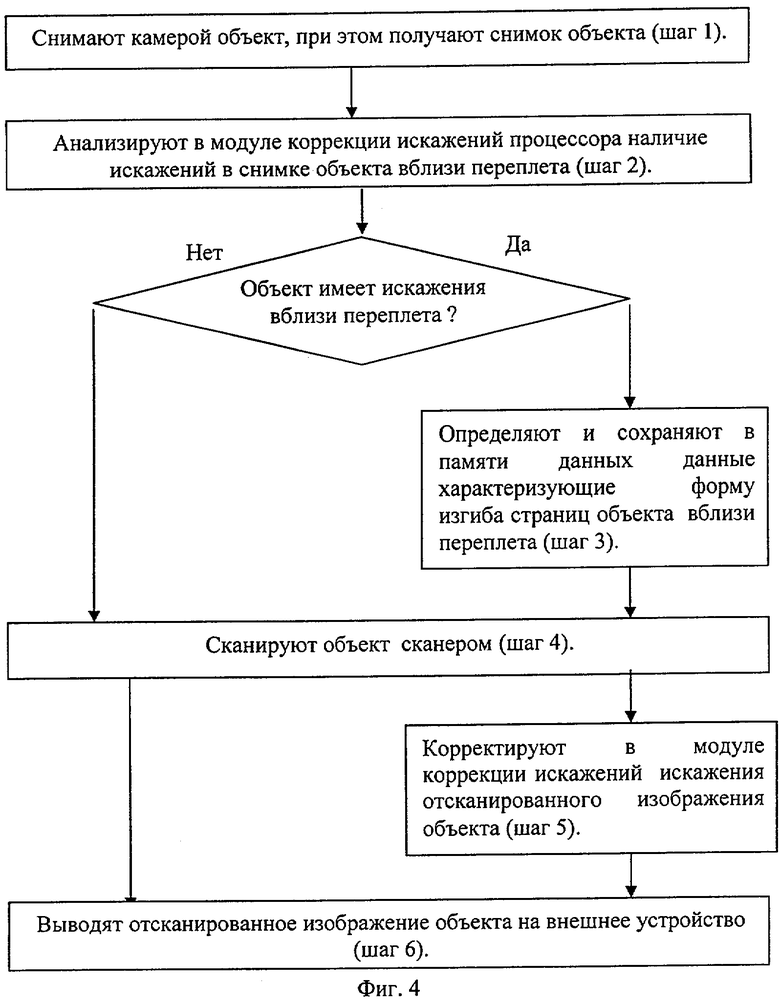
Фиг.3. Блок-схема основных этапов способа сканирования и копирования согласно изобретению.
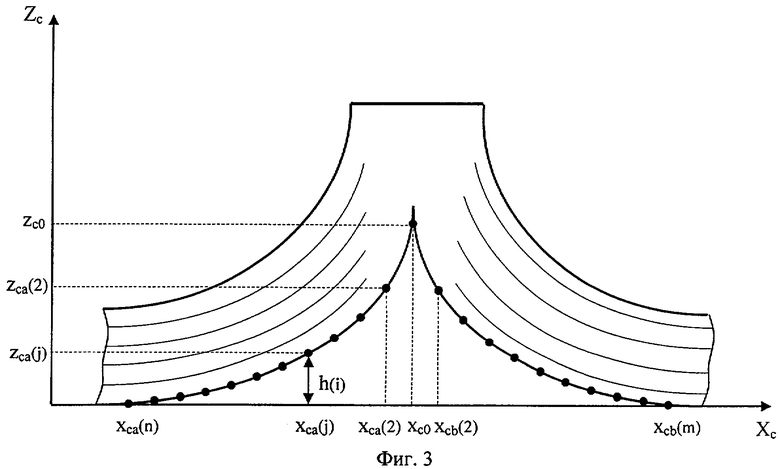
Фиг.4. Схема переплета объекта в системе координат камеры согласно изобретению.
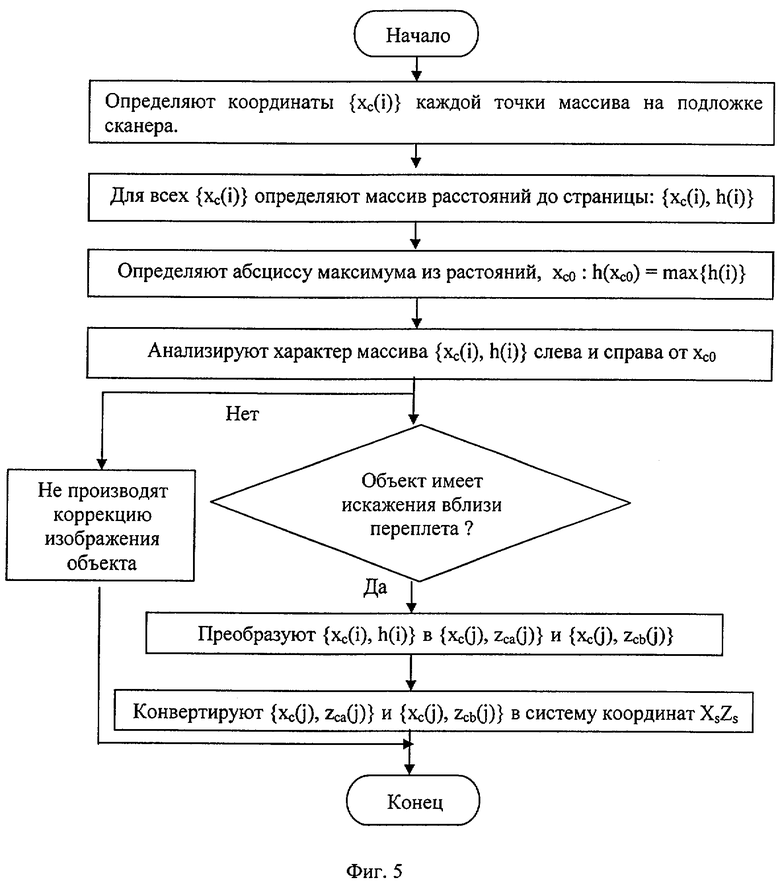
Фиг.5. Блок-схема этапов анализа кадра объекта согласно изобретению.
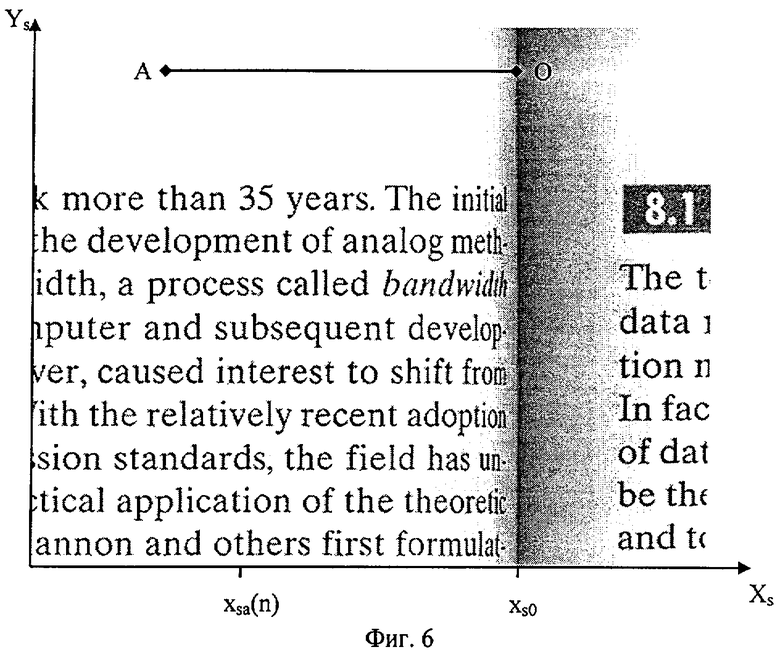
Фиг.6. Изображение фрагмента страниц книги вблизи переплета в системе координат сканера.
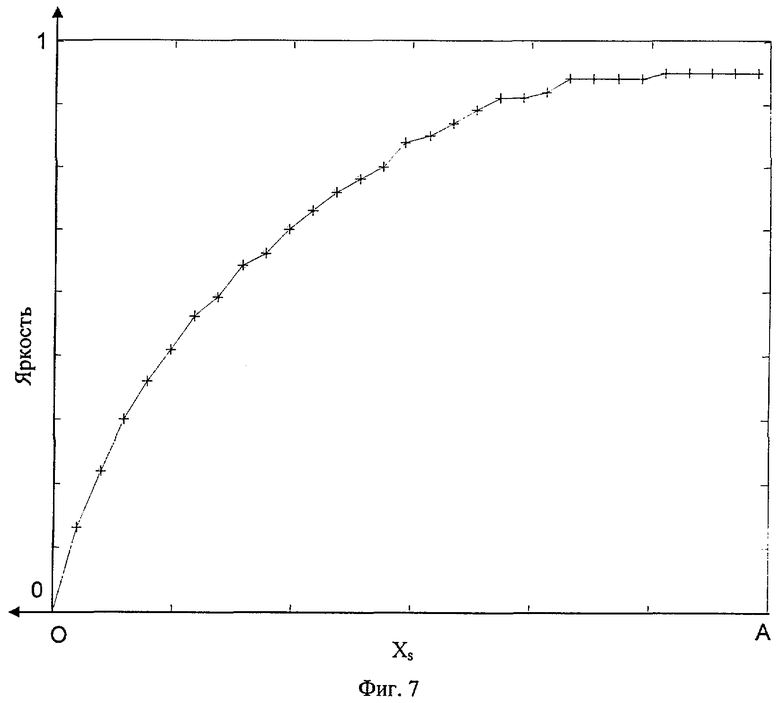
Фиг.7. График яркости фона для страницы книги вблизи переплета согласно изобретению.
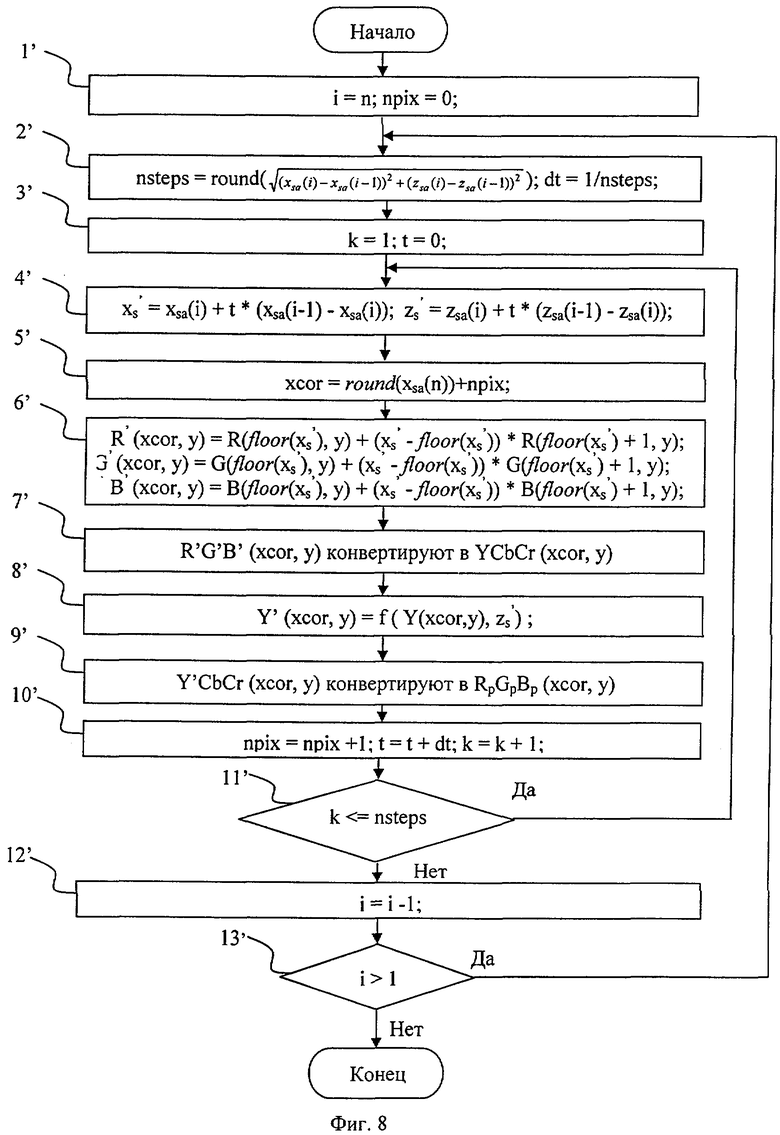
Фиг.8. Блок-схема коррекции отсканированного изображения, а именно коррекции дисторсии и тени для каждой сканированной строки в области изгиба страницы согласно изобретению.
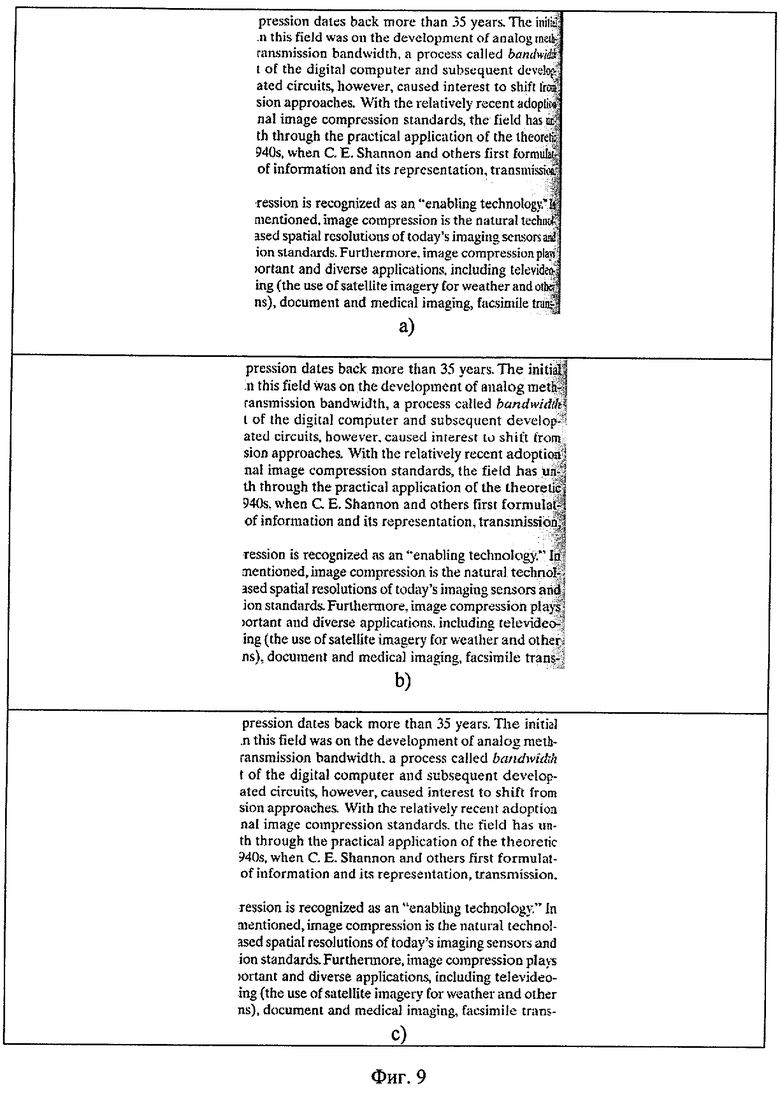
Фиг.9. Пример коррекции объекта согласно изобретению:
a) сканированный фрагмент страницы книги без коррекции;
b) сканированный фрагмент страницы книги с коррекцией только дисторсии;
c) сканированный фрагмент страницы книги с коррекцией дисторсии и тени.
На Фиг.1 показана блок-схема системы сканирования и копирования согласно изобретению. Система сканирования и копирования содержит сканер 1, камеру 2, процессор 3, содержащий модуль 4 коррекции изображений, блок 5 памяти данных параметров документов, блок 6 памяти программ, содержащий средство 7 коррекции, внешнее устройство 8 и шину 9 данных. Работа системы управляется процессором 3. Камера 2 расположена на одной из боковых сторон сканера 1, причем объектив камеры 2 расположен с боковой стороны объекта, непосредственно напротив торца переплета. При этом камера 2 выполнена с возможностью получения снимка объекта в области изгиба страниц вблизи переплета. Средство 7 коррекции выполнено с возможностью установления параметров и способа коррекции изображения. Модуль 4 коррекции искажений выполнен с возможностью анализа снимка объекта и коррекции искажений отсканированного изображения объекта. Обмен данными между сканером 1, камерой 2, процессором 3, блоком 5 памяти данных, блоком 6 памяти программ и внешним устройством 8 осуществляется по шине 9 данных. При сканировании обработка может осуществляться для отдельной строки изображения или для нескольких строк.
Фиг.2 иллюстрирует возможный вариант внешнего вида системы сканирования и копирования и показывает взаимное расположение подложки 10, камеры 2 и объекта 11. Объект 11 сканирования располагают на подложке 10 планшетного сканера 1 в развернутом виде страницами вниз, а страницы объекта 11 прижаты к подложке 10. Причем объект 11 располагают на подложке 10 торцом переплета напротив метки 12 на корпусе сканера 1, а страницы объекта 11 расположены параллельно границам подложки 10. Для облегчения позиционирования на границах подложки и на корпусе сканер наносят метки 12 или используют ограничители. На одной из боковых сторон сканера 1, за меткой 12 расположена камера 2. В данном варианте системы камера 2 является черно-белой или цветной цифровой камерой низкого разрешения. Поле зрения камеры 2 таково, чтобы вся область изгиба страниц вблизи переплета объекта 11 попадала на снимок камеры 2. Размер снимка камеры по горизонтали 10-12 см достаточен для книг и аналогичных переплетенных объектов до формата A3. Угол наклона камеры 2 к плоскости подложки 10 сканера 1 устанавливается в диапазоне от 0 до 60 градусов и зависит от оптической системы камеры 2 и дизайна внешнего вида системы в целом. Камера 2 расположена на одной из боковых сторон сканера 1, причем объектив камеры 2 расположен с боковой стороны объекта, вдоль линии переплета. Камера 2 может быть встроена в корпус сканера 1 или подсоединяться на момент сканирования.
Важно отметить, что использование камеры 2 является одним из самых простых способов для усредненной оценки изгиба страниц объекта 11 вблизи переплета. Далее будет показано, что данное техническое решение позволяет производить коррекцию геометрических и яркостных искажений, возникающих при сканировании переплетенных объектов.
На той же стороне системы, что и камера 2, расположен осветитель 13, который включается во время съемки объекта 11 камерой 2 и обеспечивает такое освещение, чтобы боковая (т.е. торцевая) часть объекта 11 освещалась, а остальная часть оставалась темной. Возможно, однако, и другое решение проблемы освещения, обеспечивающего выраженный контраст между торцевой частью объекта и остальными его частями. Сканирующая головка 14 сканера 1 движется вдоль оси Ys параллельно подложке 10 сканера 1. Сверху объект 11 на подложке 10 накрывают крышкой 15 либо иным способом обеспечивают прижатие объекта 11 к подложке 10 сканера 1. Скорректированное отсканированное изображение объекта 11 выводят на внешнее устройство 8, которым в данном варианте системы является принтер, встроенный в корпус сканера 1. На Фиг.1 показан выходной лоток 14 печатающего устройства.
На Фиг.1 также обозначены системы координат, используемые в описании ниже:
XsYsZs - система координат сканированного изображения объекта;
XcZc - система координат кадра объекта, снятого камерой;
XpYp - система координат напечатанного скорректированного изображения объекта.
На Фиг.3 приведена блок-схема основных этапов способа сканирования и копирования объектов в переплете согласно изобретению. Пользователь ориентирует объект 11 на подложке 10 сканера 1, закрывает крышку 15 сканера 1 и дает команду на сканирование объекта 11. После чего включают боковой осветитель 13, снимают камерой 2 объект 11, при этом получают снимок объекта 11 (шаг 1). Записывают полученный снимок объекта в блок 5 памяти 0 данных. Анализируют в модуле 4 коррекции искажений процессора 3 наличие искажений в снимке объекта 11 из блока 5 памяти данных в соответствии с параметрами, полученными из средства 7 коррекции. При этом определяют имеет ли объект 11 искажения вблизи переплета (шаг 2). В случае, если объект имеет искажения вблизи переплета, определяют и сохраняют в блоке 5 памяти данных параметры, характеризующие форму изгиба страниц объекта 11 вблизи переплета (шаг 3). После чего сканируют объект 11 сканером 1 (шаг 4). Записывают отсканированное изображение объекта 11 в блок 5 памяти данных. Определяют и корректируют в модуле 4 искажения отсканированного изображения объекта из блока 5 памяти данных в соответствии с параметрами и способом коррекции, установленными в средстве 7 коррекции (шаг 5). При этом используют данные, характеризующие форму изгиба страниц объекта 11 вблизи переплета. В итоге записывают скорректированное отсканированное изображение объекта 11 в блок 5 памяти данных и выводят его на внешнее устройство 8 (шаг 6), например принтер, при этом получают скорректированную копию объекта. В случае, если объект 11 не имеет искажений вблизи переплета, сканируют объект 11 сканером 1 (шаг 4) и выводят отсканированное изображение объекта 11 на внешнее устройство 8 (шаг 6).
На Фиг.5 приведена блок-схема этапов анализа кадра объекта согласно изобретению. В блок-схеме используются обозначения, принятые ранее на Фиг.4. На первом этапе вводят систему координат кадра объекта, снятого камерой XcZc, ось Хс которой направлена параллельно, а ось Zc - перпендикулярно подложке, в системе координат кадра объекта, снятого камерой, задают массив точек на подложке сканера, отстоящих друг от друга на равном расстоянии, и определяют координаты {xc(i)} каждой точки массива на подложке сканера. Для всех точек массива с координатами (xc(i)} определяют массив расстояний {h(i)} от каждой точки на подложке сканера zc=0 до ее проекции на странице объекта. В результате получают массив пар точек {xc(i), h(i)}. Определяют координату xс0, соответствующую максимуму массива расстояний (абсциссу максимума):

Анализируют характер массива {xc(i), h(i)} слева и справа от xс0 и делают заключение о том, имеет объект искажения вблизи переплета или нет. Если объект не имеет искажений вблизи переплета, то коррекцию отсканированного изображения объекта не производят. В случае, если объект имеет искажения вблизи переплета, массив {xc(i), h(i)} преобразуют в два массива координат (xc(j), zca(j)} и {xc(j), zcb(j)}, как показано на Фиг.4. Вводят систему координат сканера XsZs, оси которой совпадают с осями системы координат кадра объекта, снятого камерой XcZc. Массивы координат {xc(j), zca(j)} и {xc(j), zcb(j)} преобразуют (конвертируют) в систему координат сканера XsZs:
где  согласует разрешение камеры и сканера по оси X; d согласует разрешение камеры и сканера по оси Z, а также учитывают угол наклона камеры к подложке; tx переносит начало системы координат. В результате получают массивы координат
согласует разрешение камеры и сканера по оси X; d согласует разрешение камеры и сканера по оси Z, а также учитывают угол наклона камеры к подложке; tx переносит начало системы координат. В результате получают массивы координат 
 из n элементов и {xsb(j), zsb(j)} из m элементов, определяющие форму изгиба страницы объекта. Эти массивы используются для коррекции дисторсии и тени.
из n элементов и {xsb(j), zsb(j)} из m элементов, определяющие форму изгиба страницы объекта. Эти массивы используются для коррекции дисторсии и тени.
Рассмотрим схематичное изображение страницы объекта без коррекции в системе координат сканера (Фиг.6). Значения пикселов каждой строки сканированного изображения в диапазоне 
 имеют геометрические (дисторсия) и яркостные/цветовые (тень) искажения. В то же время пикселы вне этого диапазона не искажены и переносятся в результирующее изображение без преобразований.
имеют геометрические (дисторсия) и яркостные/цветовые (тень) искажения. В то же время пикселы вне этого диапазона не искажены и переносятся в результирующее изображение без преобразований.
Причиной дисторсии является то, что изображение изогнутой поверхности страницы объекта проецируют на плоскость подложки сканера. При данной ориентации объекта и головки сканирования дисторсия имеет место только вдоль оси Xs, следовательно, каждая строка сканированного изображения может быть скорректирована независимо от других строк. Для восстановления функций изгиба страниц объекта при коррекции отсканированного изображения используют кусочно-линейную интерполяцию по массивам координат  и
и  . Количество пикселов каждой строки скорректированного отсканированного изображения объекта превосходит количество пикселов отсканированного изображения на Delta:
. Количество пикселов каждой строки скорректированного отсканированного изображения объекта превосходит количество пикселов отсканированного изображения на Delta:

где round - функция округления до ближайшего целого,  и
и  - суммарные длины интерполирующих отрезков, что соответствует количеству пикселов изогнутых частей страниц:
- суммарные длины интерполирующих отрезков, что соответствует количеству пикселов изогнутых частей страниц:
 ,
,
Для коррекции дисторсии вдоль интерполированной кривой, образованной сечением изогнутой поверхности страницы объекта, отсчеты выбирают с шагом в единицу длины системы координат сканера, в результате чего определяют соответствующую координату xs', по которой из сканированного изображения вычисляют значения цветовых составляющих R'G'B' скорректированного изображения путем линейной интерполяции по значениям цветовых составляющих пикселов RGB сканированного изображения с координатами floor(xs') и floor(xs')+1, где floor - функция взятия целой части:

для G' и В' аналогично.
Текущие координаты отсчетов (xs', zs') вдоль интерполированной отрезками кривой вычисляют по параметрическим уравнениям отрезков прямой от точки с координатами  до
до  i=2...n:
i=2...n:
где t=0 в начале отрезка (точка  , t=1 в конце отрезка (точка
, t=1 в конце отрезка (точка  шаг изменения t:
шаг изменения t:

Вычисления текущих координат отсчетов (xs', zs') вдоль интерполированной кривой для массива {xsb(j), zsb(j)} производят аналогично.
В общем случае характер яркостных и цветовых искажений в области изгиба страницы имеет сложный характер, определяемый многими факторами. Типичным эффектом является затемнение изображения (образования тени) вблизи переплета книги. График яркости фона страницы объекта для этой области (вдоль отрезка АО с Фиг.6) показан на Фиг.7. Экспериментально удалось установить, что существует усредненная зависимость яркости искаженного пиксела от яркости исходного пиксела и расстояния до проекции этого пиксела на странице от подложки сканера. Далее эту зависимость преобразуют в функцию, учитывающую также и разрешение сканирования:

где Y'(x, у) - яркость скорректированного пиксела, Y(xs', у) - яркость пиксела сканированного изображения, zs' - расстояния до страницы от подложки сканера в xs'.
Одним из простейших вариантов f(Y(xs', у), zs') может служить следующая функция:
где значения яркости нормированы в диапазон от 0 до 1, функция измерена для разрешения 200 dpi и определенной модели сканера. Данная функция использована для коррекции изображения с Фиг.9а, результат коррекции показан на Фиг.9с. Для каждой конкретной модели сканера эта зависимость может быть измерена предварительно.
Для получения значения яркости Y R'G'B' - составляющие отсканированного изображения после коррекции дисторсии преобразуют в цветовую систему, один из каналов которой является яркостью, а два других кодируют цвет. Эффективно использовать линейное преобразование в систему YIQ или YCbCr, но в рамках данного изобретения могут использоваться и более сложные преобразования, например, в цветовые системы HSB или L*a*b*. После коррекции значения яркости Y->Y' происходит обратное преобразование в цветовую систему RGB, два остальных канала, кодирующих цвет, не изменяются.
На Фиг.8 приведена блок-схема коррекции дисторсии и тени для каждой сканированной строки с координатой у в диапазоне изгиба страницы  . На шаге 1' инициализируется счетчик цикла i для перебора интерполирующих отрезков прямой, построенных по массивам координат
. На шаге 1' инициализируется счетчик цикла i для перебора интерполирующих отрезков прямой, построенных по массивам координат  и устанавливается начальное значение для переменной npix - счетчика количества скорректированных пикселов. На шаге 2' в соответствии с формулой (7) определяется величина dt, равная единице длины системы координат сканера, и переменная nsteps, равная количеству отсчетов, дискретизирующих текущий отрезок. На шаге 3' инициализируется счетчик цикла k для перебора отсчетов на отрезке, и для параметра прямой t устанавливается нулевое значение, которое соответствует началу отрезка. На шаге 4' отсчеты выбираются в соответствии с параметрическим уравнением прямой (6) и определяются значения (xs', zs'). На шаге 5' вычисляется значение индекса в массиве скорректированных пикселов. На шаге 6' из сканированного изображения вычисляются значения цветовых составляющих R'G'B' скорректированного изображения путем линейной интерполяции (5) по значениям цветовых составляющих пикселов RGB сканированного изображения с координатами floor(xs') и floor(xs')+1. На шаге 7' выполняется конвертирование значений цветовых координат текущего пиксела R'G'B' в цветовое пространство YCbCr. На шаге 8' осуществляется коррекция яркостных (теневых) искажений. Обратное преобразование из цветового пространства YCbCr, где значение яркости Y уже скорректировано на предыдущем шаге, выполняется на шаге 9'. На шаге 10' увеличиваются на единицу количество скорректированных пикселов и число взятых на отрезке отсчетов. При этом на величину dt увеличивается параметр прямой t. Шаги с 4' по 10' выполняются в цикле пока условие 11' истинно.
и устанавливается начальное значение для переменной npix - счетчика количества скорректированных пикселов. На шаге 2' в соответствии с формулой (7) определяется величина dt, равная единице длины системы координат сканера, и переменная nsteps, равная количеству отсчетов, дискретизирующих текущий отрезок. На шаге 3' инициализируется счетчик цикла k для перебора отсчетов на отрезке, и для параметра прямой t устанавливается нулевое значение, которое соответствует началу отрезка. На шаге 4' отсчеты выбираются в соответствии с параметрическим уравнением прямой (6) и определяются значения (xs', zs'). На шаге 5' вычисляется значение индекса в массиве скорректированных пикселов. На шаге 6' из сканированного изображения вычисляются значения цветовых составляющих R'G'B' скорректированного изображения путем линейной интерполяции (5) по значениям цветовых составляющих пикселов RGB сканированного изображения с координатами floor(xs') и floor(xs')+1. На шаге 7' выполняется конвертирование значений цветовых координат текущего пиксела R'G'B' в цветовое пространство YCbCr. На шаге 8' осуществляется коррекция яркостных (теневых) искажений. Обратное преобразование из цветового пространства YCbCr, где значение яркости Y уже скорректировано на предыдущем шаге, выполняется на шаге 9'. На шаге 10' увеличиваются на единицу количество скорректированных пикселов и число взятых на отрезке отсчетов. При этом на величину dt увеличивается параметр прямой t. Шаги с 4' по 10' выполняются в цикле пока условие 11' истинно.
На шаге 12' уменьшается на единицу счетчик цикла i для перебора интерполирующих отрезков прямой.
Шаги с 2' по 12' выполняются в цикле для каждого отрезка пока условие 13' истинно.
Для коррекции в диапазоне [xsb(1), xsb(m)] блок-схема в целом аналогична.
Тот факт, что для каждой строки сканированного коррекция производится независимо позволяет значительно оптимизировать время выполнения коррекции за счет предварительного вычисления таблицы перекодировки (LUT - LookUp Table) со значениями (xs', zs'), индексом в LUT является координата х скорректированного изображения.
После выполнения коррекции изображение выводят на печатающее устройство, при этом получают копию объекта. Перед выводом на печать координаты пикселов (х, у) скорректированного изображения преобразуют в координаты печатного устройства:
где ρ согласует разрешение сканера и принтера; tx1 и ty1 переносят начало системы координат.
Данное изобретение предполагает осуществлять кадрирование по границам объекта или страниц.
Также возможна различная логика работы системы при копировании, например, когда копируется только одна страница книги или две страницы книги копируются на 1 лист с масштабированием и тому подобное.
В рамках данного изобретения возможно движение сканирующей головки планшетного сканера вдоль оси Xs, что потребует коррекции нескольких строк и незначительного изменения в средстве установления коррекции (в частности показанного на Фиг.8), но не влияет на основные принципы заявленной системы и способа сканирования.
На Фиг.9 приведен пример коррекции фрагмента страницы книги. Фиг.9а демонстрирует сканированный фрагмент страницы книги без коррекции, Фиг.9b - коррекцию только дисторсии, Фиг.9с - коррекцию дисторсии и тени.
Необходимо отметить, что настоящее изобретение может использоваться не только для книг, но и для любых других объектов (например, документов и фотографий) как обычный копир или планшетный сканер. Соответственно лучшим вариантом реализации изобретения является модификация копира, планшетного сканера или многофункционального периферийного устройства (MFP).
Наиболее существенными улучшениями, которые обеспечиваются на основе заявленного изобретения, являются:
а) корректировка геометрических искажений и выравнивание относительной освещенности в процессе сканирования объектов в толстом переплете, в частности книг, обеспечивается практически в реальном масштабе времени за счет использования процедуры обработки снимка, формируемого камерой, расположенной сбоку от сканируемого объекта;
b) анализ формы изгиба страниц объекта в предварительном режиме, а именно уже в момент начала процесса сканирования, дает возможность обеспечить приемлемые требования к аппаратным ресурсам системы (запоминание в предпочтительном варианте изобретения, лишь одной или нескольких линий сканирования);
с) возможность использования предложенного способа для коррекции подобного рода помех в иных устройствах подобного рода, например сканерах, осуществляющих сканирование сверху, или в случаях, когда снимок объекта формируется с помощью основной цифровой камеры высокого разрешения.
Указанный выше вариант выполнения изобретения изложен с целью иллюстрации заявленного изобретения, при этом специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ И КОПИРОВАНИЯ | 2004 |
|
RU2368091C2 |
| СПОСОБ И СИСТЕМА ИСПРАВЛЕНИЯ ПЕРСПЕКТИВНЫХ ИСКАЖЕНИЙ В ИЗОБРАЖЕНИЯХ, ЗАНИМАЮЩИХ ДВУХСТРАНИЧНЫЙ РАЗВОРОТ | 2016 |
|
RU2631765C1 |
| СИСТЕМА И СПОСОБ КОПИРОВАНИЯ | 2004 |
|
RU2308166C2 |
| НЕ ПОДДАЮЩИЕСЯ ПОДДЕЛКЕ И ФАЛЬСИФИКАЦИИ ЭТИКЕТКИ СО СЛУЧАЙНО ВСТРЕЧАЮЩИМИСЯ ПРИЗНАКАМИ | 2005 |
|
RU2370377C2 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ЧТЕНИЯ ДОКУМЕНТОВ | 2022 |
|
RU2781211C1 |
| Способ калибровки установки селективного лазерного сплавления | 2024 |
|
RU2839633C1 |
| Способ калибровки видеосистемы для контроля объектов на плоской площадке | 2016 |
|
RU2610137C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЗНАКОВ | 2008 |
|
RU2390843C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
Изобретение относится к системам и способам сканирования преимущественно для объектов в переплете. Техническим результатом является обеспечение высокоскоростной коррекции геометрических искажений объекта в области переплета при максимальном использовании стандартного офисного оборудования типа сканеров и цифровых фотокамер, достигаемый тем, что система сканирования преимущественно переплетенных объектов содержит связанные между собой шиной данных сканер, цифровую камеру, процессор, блок памяти программ, блок памяти данных параметров документов и внешнее отображающее устройство, причем объектив камеры направлен на торцевую сторону объекта, блок памяти программ содержит средство коррекции, выполненное с возможностью установления параметров и способа коррекции изображения, процессор имеет модуль коррекции искажений, выполненный с возможностью анализа снимка объекта, полученного с камеры, а также коррекции искажений отсканированного изображения объекта вблизи переплета путем определения и обработки параметров, характеризующих форму изгиба страниц объекта вблизи переплета. 2 н. и 15 з.п. ф-лы, 9 ил.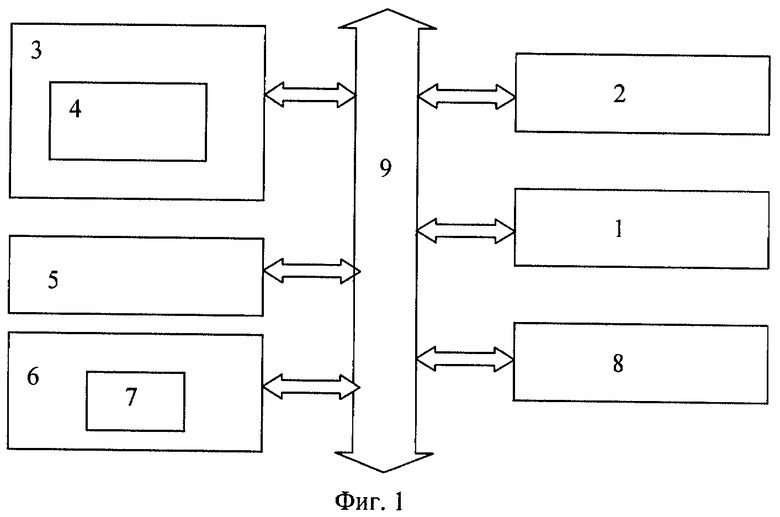
xc0:h(xc0)=max{h(i)},
анализируют характер массива {xc(i), h(i)} слева и справа от xс0 и определяют, имеет ли объект искажения вблизи переплета или нет.
где а согласует разрешение камеры и сканера по оси X, d согласует разрешение камеры и сканера по оси Z, а также учитывают угол наклона камеры к подложке, где tx переносит начало системы координат, в результате получают массивы координат {xsa(j), zsa(j))} из n элементов и {xsb(j), zsb(j)} из m элементов, определяющие форму изгиба страниц объекта вблизи переплета.
Delta=round(La+Lb-(xsb(m)-Xsa(n))),
где round - функция округления до ближайшего целого, La и Lb - суммарные длины интерполирующих отрезков, что соответствует количеству пикселов изогнутых частей страниц, при этом La и Lb задают следующей зависимостью:


для коррекции дисторсии вдоль интерполированной кривой, образованной сечением изогнутой поверхности страницы объекта, отсчеты выбирают с шагом в единицу длины системы координат сканера, в результате чего определяют соответствующую координату xs', по которой из сканированного изображения вычисляют значения цветовых составляющих R'G'B' скорректированного изображения путем линейной интерполяции по значениям цветовых составляющих пикселов RGB сканированного изображения с координатами floor(xs') и floor(xs')+1, где floor - функция взятия целой части:
R'=R(floor(xs'), y)+(xs'-floor(xs'))*R(floor(xs')+1, y),
для значения G' и В' вычисляют аналогично, текущие координаты отсчетов (xs', zs') вдоль интерполированной отрезками кривой вычисляют по параметрическим уравнениям отрезков прямой от точки с координатами (xsa(i), zsa(i)) до (xsa(i-1), zsa(i-1)), i=2...n:
xs'=xsa(i)+t·(xsa(i-1)-xsa(i),
z×s'=zsa(i)+t·(zsa(i-1)-zsa(i)),
где t=0 в начале отрезка (точка (xsa(i), zsa(i)), t=1 в конце отрезка (точка (xsa(i-1), zsa(i-1)), а шаг изменения t задают выражением:

вычисления текущих координат отсчетов (xs', zs') вдоль интерполированной кривой для массива {xsb(j), zsb(j)} производят аналогично, устанавливают экспериментально усредненную зависимость яркости искаженного пиксела от яркости исходного пиксела и расстояния до проекции этого пиксела на странице от подложки сканера, далее эту зависимость преобразуют в функцию коррекции искажений отсканированного изображения объекта, учитывающую также и разрешение сканирования:
Y'(x,y)=f(Y(xs',y),zs'),
где Y'(x, у) - яркость скорректированного пиксела, Y(xs', у) - яркость пиксела сканированного изображения, xs' - расстояния до страницы от подложки сканера в xs'.
| US 2002085248 A1, 04.07.2002 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ СКАНИРОВАНИЯ ДАННЫХ ИЗОБРАЖЕНИЯ В СИСТЕМЕ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1997 |
|
RU2154916C2 |
| СПОСОБ СКАНИРОВАНИЯ ЦВЕТНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2158486C1 |
| DE 10029827 A1, 03.01.2002 | |||
| WO 9220182 A1, 12.11.1992 | |||
| US 6608707 A1, 19.08.2003. | |||

