Изобретение относится к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот, и может быть использовано в поршневых двигателях, поршневых насосах и компрессорах.
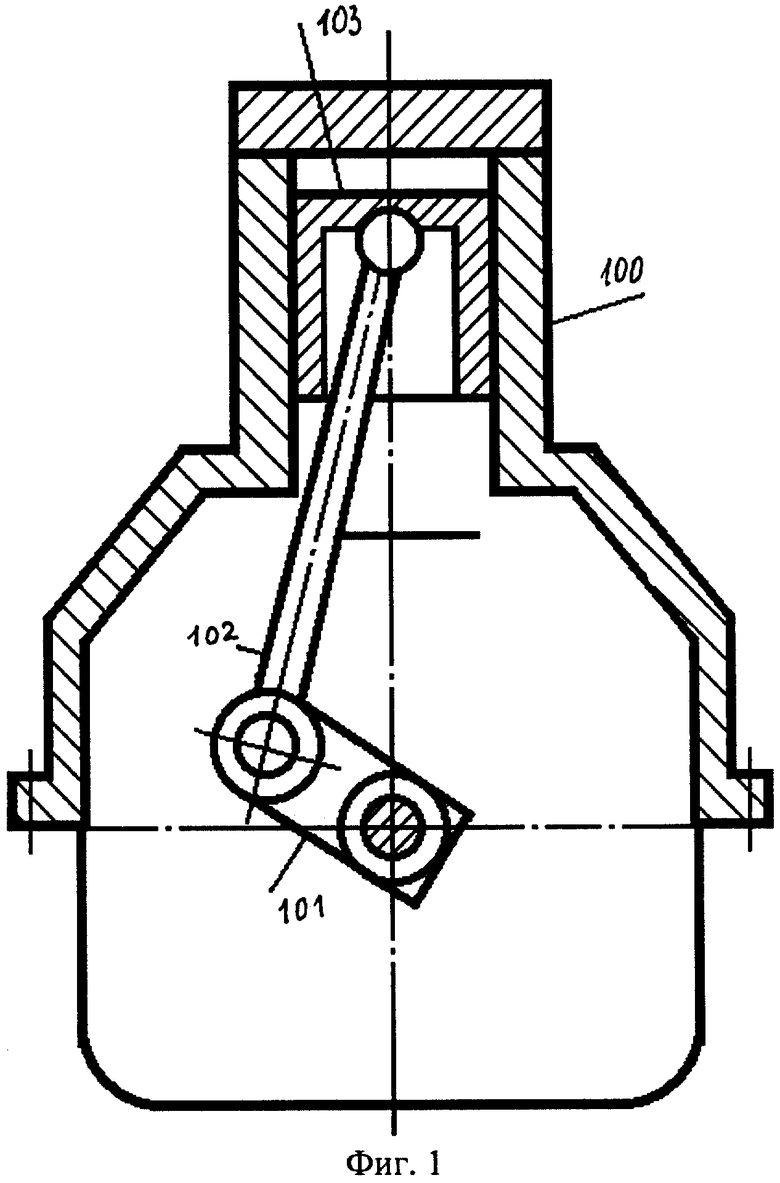
Классическая схема механизма для преобразования поступательного движения во вращательное в двигателе внутреннего сгорания (ДВС) описана в монографии Кузнецова А.В. «Устройство и эксплуатация двигателей внутреннего сгорания: учебное пособие для технических училищ». М.: Высшая школа, 1979, на стр.40 [1] и поясняется на фигуре 1, где приведен чертеж кривошипно-шатунного механизма двигателя внутреннего сгорания. На фигуре 1 цифрами обозначены: 101 - коленчатый вал (кривошип); 102 - шатун; 103 - ползун; 100 - стойка. Для лучшего понимания изложенного далее технического решения необходимо отметить, что в приведенной ссылке верхняя часть ползуна 103 выполняет также функции поршня, сжимающего в процессе преобразования вращательного движения в поступательное движение рабочую смесь в цилиндре, образованном стойкой 100, и предающего энергию взрыва рабочей смеси на механизм преобразования поступательного движения во вращательное.
Известны также некоторые конструкции бесшатунных механизмов преобразования возвратно-поступательного движения во вращательное и наоборот, различные варианты которых описаны и проанализированы, в частности, в монографии Баландина С.С. «Бесшатунные поршневые двигатели внутреннего сгорания», М.: Машиностроение, 1968, стр.14 [2]. Практическая конструкция была защищена авторским свидетельством СССР №118471 [3], в котором описан бесшатунный механизм, содержащий коленчатый вал, две опорные шейки которого находятся в подшипниках кривошипов, а штоковые шейки расположены в подшипниках ползунов. Оригинальные технические решения в области конструирования поршневых бесшатунных механизмов описаны в патентах США № 4,559,838 [4] и № 6,631,671 [5].
Известно также техническое решение, предложенное в авторском свидетельстве СССР №1573271 [6], в котором описан передаточный механизм, содержащий два эксцентрика, один из которых расположен внутри другого, причем один из эксцентриков шарнирно установлен в корпусе. Интересная конструкция-аналог упоминается в [2] на стр.15, где описан бесшатунный механизм, содержащий спаренные эксцентрики и коленчатый вал.
Принципиальным недостатком известных бесшатунных механизмов преобразования возвратно-поступательного движения во вращательное и наоборот является конструктивная невозможность управления преобразованием для остановки, изменения направления движения деталей механизма и т.д., при сохранении у вала способности вращаться, например, за счет других приводов. Устранение этого недостатка обеспечило бы возможность блокировки отдельных механизмов, приводимых одним валом или приводящих один вал, что значительно расширяет сферу применения механизма.
Наиболее близким к заявляемому изобретению является решение, описанное в патенте РФ №2212552 [7], в котором предложена модульная конструкция бесшатунного двигателя со звездообразным расположением цилиндров. Каждый модуль состоит из двух картер-цилиндров, скрепленных стяжными болтами. В цилиндрах размещены две пары связанных штоками поршней, которые установлены попарно перпендикулярно друг другу. На цилиндрах укреплены стяжными хомутами крышки под системы газораспределения золотникового типа. Каждая пара поршней, связанных со штоками, выполнена как одно целое в виде шток-поршня. Подшипники качения коленчатого вала установлены в картер-цилиндрах и взаимодействуют своими подвижными обоймами с противовесом силового механизма, выполненным из двух частей. На штоковой шейке коленчатого вала на подшипниках скольжения размещена пара эксцентриков с разнонаправленным эксцентриситетом и противовесами к ним. Эксцентрики размещены в отверстиях, обрамленных ступицей, в средней части шток-поршней. Направляющей для шток-поршней служат внутренние поверхности средней части картер-цилиндров. Перечисленные составляющие образуют модуль двигателя, причем двигатель можно снабжать одним или несколькими модулями. Двигатель снабжен редуктором, который помещен в секционном корпусе управления системами газораспределения и связан с ними кинематически.
Таким образом, в этом техническом решении предусматривается управление преобразователями движения за счет добавление или снятие отдельных блоков многоцилиндрового двигателя (по типу модульного конструктора) для достижения необходимой мощности двигателя. Но такая процедура возможна только в мастерской, требует специального оборудования и участия квалифицированных специалистов, что делает конструкцию весьма неудобной для практического применения, например, в автомобиле.
Задача, на решение которой направлено заявляемое изобретение, заключается в том, чтобы, используя известные принципы конструирования преобразователей движения, разработать конструкцию управляемого механизма, т.е. механизма способного, в частности, останавливать преобразование или изменять направления движения деталей при сохранении у вала способности вращаться, например, за счет других приводов.
Технический результат достигается за счет того, что бесшатунный механизм на основе эксцентриков (вариант А) или эксцентриков и кривошипного вала (вариант Б) снабжен устройством, обеспечивающим передачу движения между элементами вращательного и поступательного движения, и приспособлением, способным - в одном режиме работы - блокировать возвратно-поступательное движение (в частности зафиксировать ползун в неподвижном положении) при сохранении у вала возможности вращаться, во втором режиме работы - обеспечивать вышеуказанную передачу движения.
Сущность изобретения заключается в следующем.
В варианте А управляемый преобразователь движения, т.е. механизм для преобразования возвратно-поступательного движения во вращательное и наоборот, включает в себя, по меньшей мере, два помещенных один в другой эксцентрика разного диаметра и одинакового по величине эксцентриситета, причем малый эксцентрик жестко закреплен на валу вращения и служит осью большому эксцентрику, шарнирно связанному с ползуном, способным совершать возвратно-поступательные движения по направляющим, который, в свою очередь, связан со штоком поршня, а также управляемое стопорное устройство, выполненное с возможностью при его активации фиксировать привод возвратно-поступательного движения, в частном случае путем фиксации ползуна механическим штырем-задвижкой или сердечником соленоида при сохранении у вала возможности вращения.
В варианте Б управляемый преобразователь движения, т.е. механизм для преобразования возвратно-поступательного движения во вращательное и наоборот, включает в себя эксцентрик, осью вращения которому служит шип кривошипного вала, смещенный относительно оси вращения кривошипного вала на величину эксцентриситета эксцентрика, причем эксцентрик шарнирно соединен с ползуном, способным совершать возвратно-поступательные движения по направляющим, который, в свою очередь, связан со штоком поршня, и управляемое стопорное устройство, выполненное с возможностью при его активации фиксировать привод возвратно-поступательного движения, в частном случае путем фиксации ползуна механическим штырем-задвижкой или сердечником соленоида при сохранении у вала возможности вращения.
В рассматриваемых вариантах реализации изобретения ползун и поршень представлены как отдельные элементы, соединенные штоком 6, однако, не имеется препятствий для объединения их в единый блок, устраняющий шток 6. Кроме того, в обоих вариантах исполнения управляемого преобразователя для уменьшения сил трения и соответственно увеличения коэффициента полезного действия при взаимодействии деталей могут быть применены дополнительные элементы, например подшипники, заменяющие трение скольжения трением качения, в том числе при взаимодействии ползуна с направляющими.
Существенно, что вал, применяемый для варианта А управляемого преобразователя, технологически нетрудно сделать полым ввиду отсутствия кривошипов, что может быть полезно для облегчения конструкции, для пропускания через вал охлаждающей жидкости с целью уменьшения температурных нагрузок или, например, для пропускания через полый вал альтернативного привода.
Далее существо изобретения поясняется с привлечением графических материалов. Для варианта А на фигурах 2-4 цифрами обозначены:
1 - ползун;
2 - направляющие;
3 - эксцентрик большой;
4 - эксцентрик малый;
5 -вал;
6 - шток;
7 - поршень;
11 - механический элемент, отключающий привод возвратно-поступательного движения, в частном случае - путем фиксации ползуна.
Эксцентрики 3 и 4 имеют одинаковый эксцентриситет, который на фигуре 2 обозначен буквой Е.
Управляемый преобразователь движения по варианту А (см. фигуру 2) включает в себя ползун 1, способный совершать возвратно-поступательные движения по направляющим 2 и имеющий шарнирное соединение с эксцентриком 3. Осью вращения эксцентрику 3 служит шарнирно связанный с ним эксцентрик 4. Эксцентрики 3 и 4 имеют одинаковый по величине, но разнонаправленный эксцентриситет Е. Эксцентрик 4 жестко закреплен на валу 5.
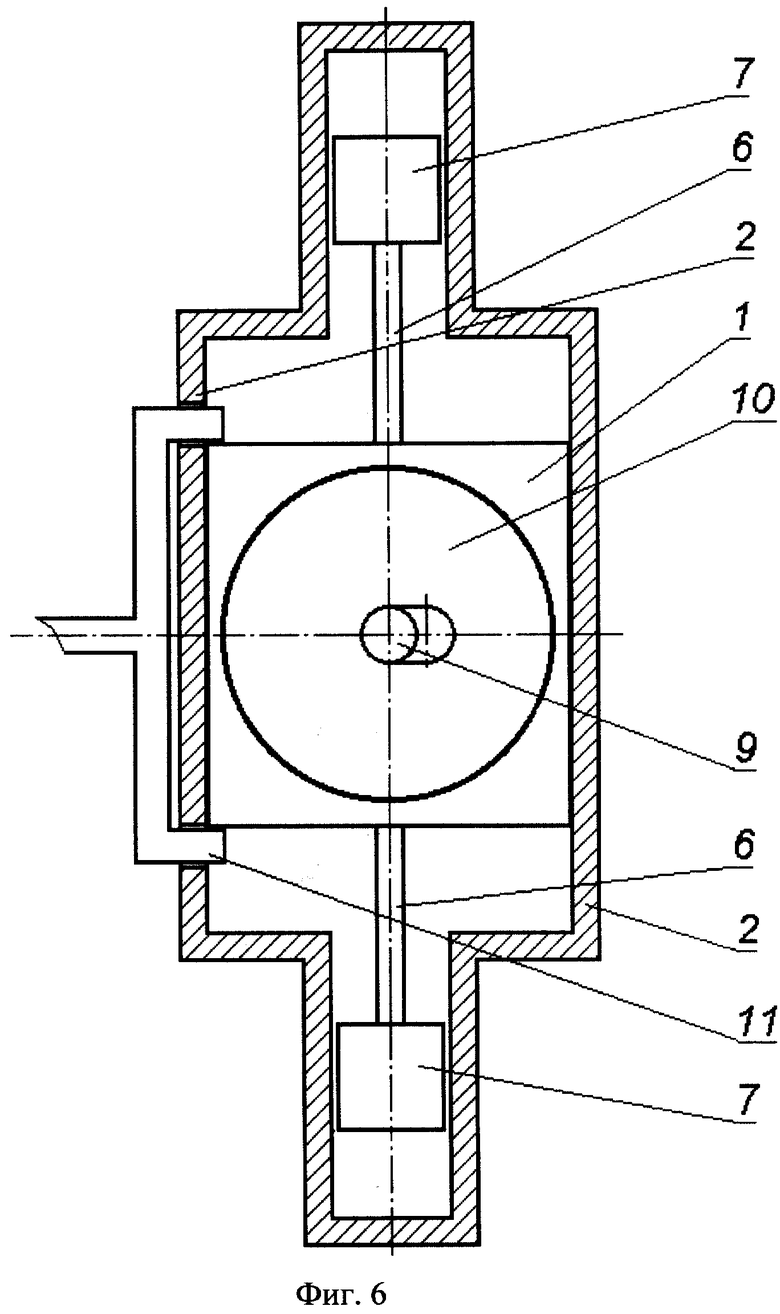
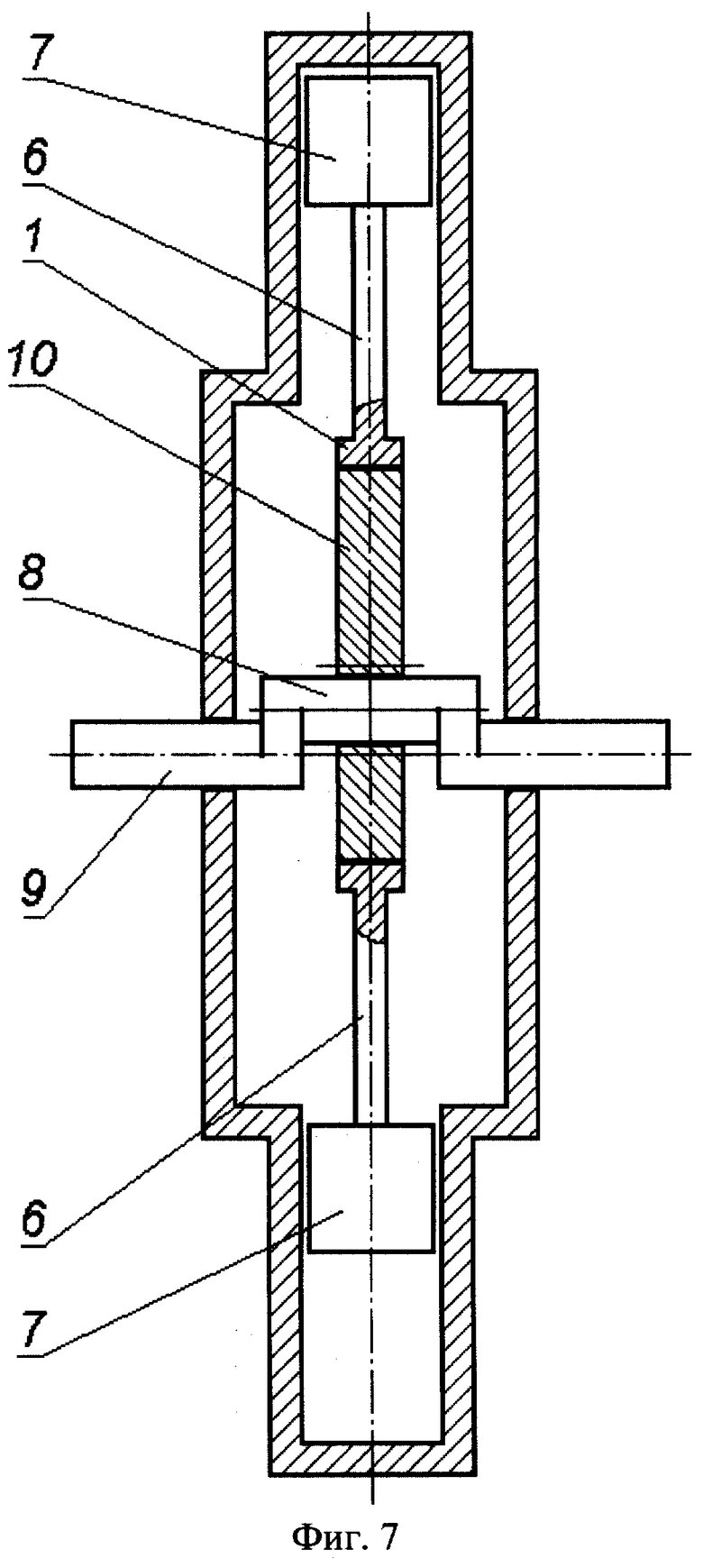
Для варианта Б на фигурах 5-7 цифрами обозначены:
1 - ползун;
2 - направляющие;
6 - шток;
7 - поршень;
8 - шип кривошипного вала;
9 - кривошипный вал;
10 - эксцентрик;
11 - механический элемент, отключающий привод возвратно-поступательного движения, в частном случае - путем фиксации ползуна.
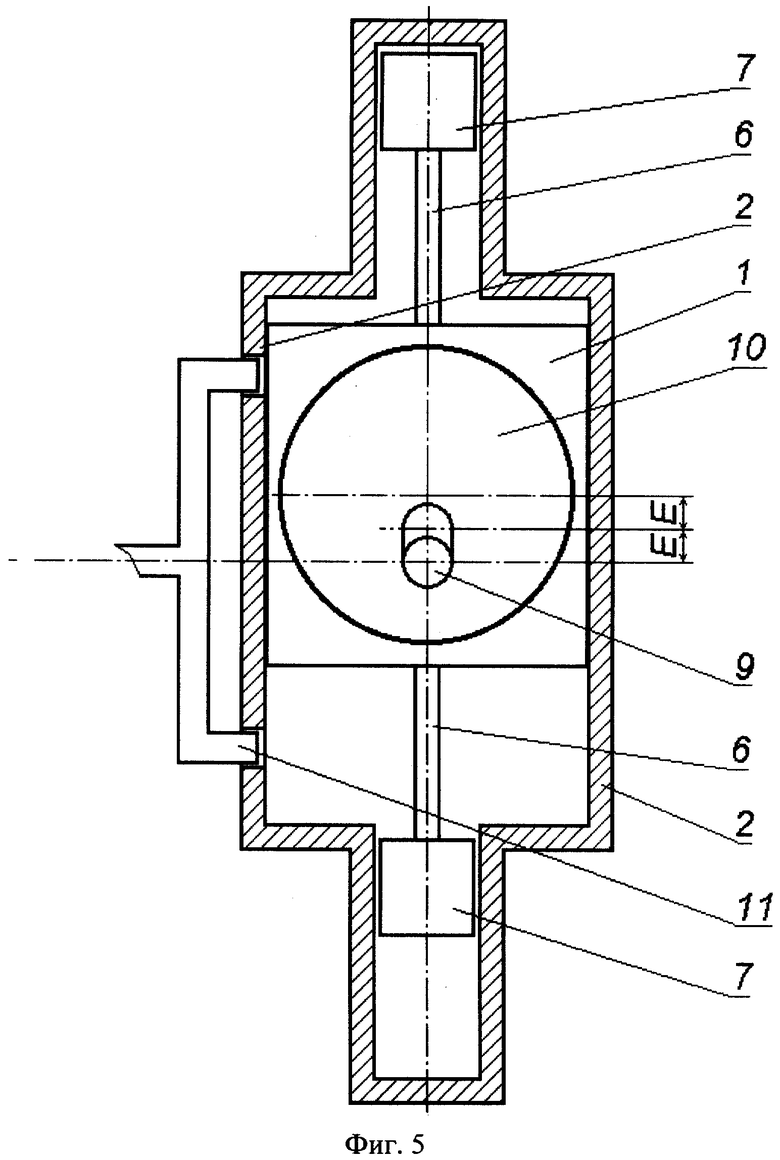
Управляемый преобразователь движения по варианту Б (см. фигуру 5) включает в себя ползун 1, способный совершать возвратно-поступательные движения по направляющим 2 и имеющий шарнирное соединение с эксцентриком 10. Осью вращения эксцентрику 10 служит шип 8 кривошипного вала 9, смещенный относительно оси вращения кривошипного вала на величину Е, равную эксцентриситету эксцентрика 10.
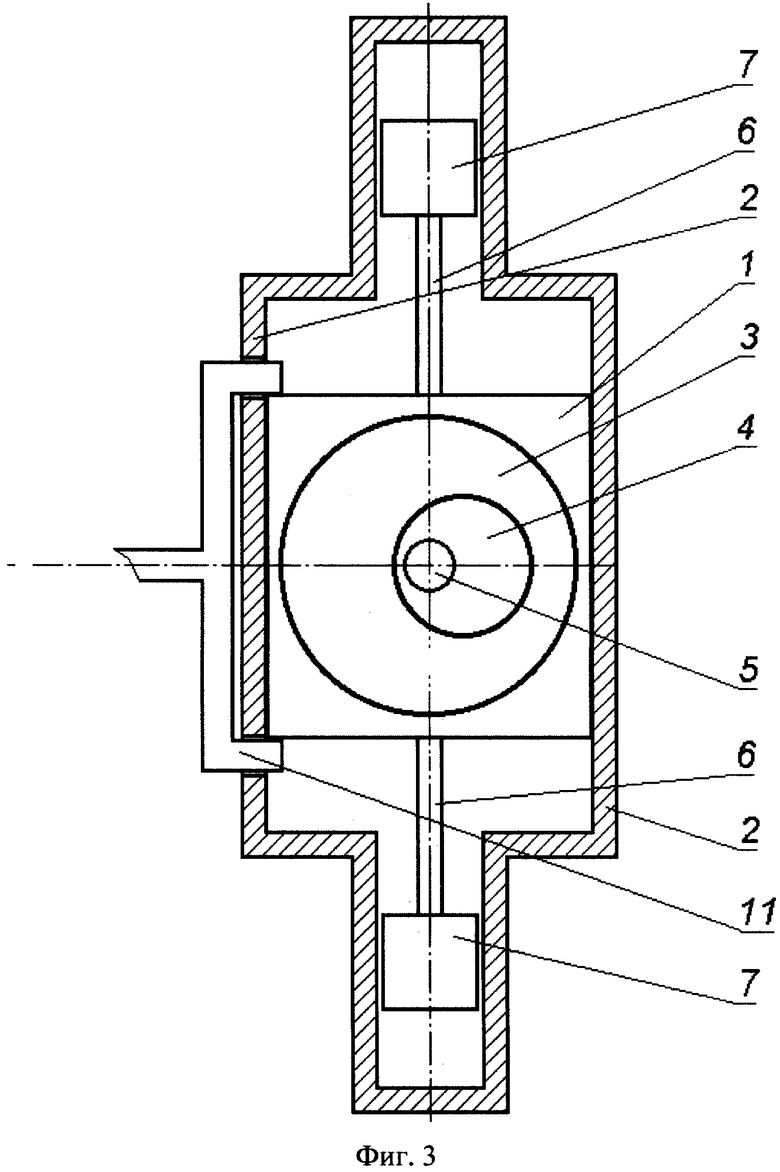
Оба вышеуказанных варианта отличаются от прототипа тем, что содержат управляемое стопорное устройство 11, выполненное с возможностью в одном режиме работы фиксировать привод возвратно-поступательного движения, в частном случае - путем фиксации ползуна, (см. фигуры 3 и 6) при сохранении у вала возможности вращения, во втором режиме работы - не влиять на функционирование ползуна и, соответственно, на преобразование движения (см. фигуру 2 и фигуру 5).
В качестве примера, на фигурах 2-11, изображен механизм в вертикальном положении с оппозитным расположением поршней 7 на штоках 6, но работа механизма, в частности, возможна и в горизонтальном положении, и с одним поршнем.
Характерной особенностью конструкции управляемого преобразователя движения в обоих рассматриваемых вариантах является наличие устройства, предназначенного для отключения/включения преобразования движения механизмом с сохранением у вала возможности вращения за счет других приводов преимущественно аналогичной конструкции.
При этом фиксирующее устройство, а в данном примере это устройство, фиксирующее ползун в неподвижном положении, может работать за счет взаимодействия механических, электрических, пневматических, гидравлических, магнитных элементов или их комбинаций, и иметь ручную, полуавтоматическую или автоматическую систему управления, т.е. привод.
В качестве одного из возможных вариантов выполнения такого устройства на фигурах 2, 3, 5, 6, 8, 9 показан механический элемент 11, способный зафиксировать ползун в неподвижном положении.
На фигуре 2 изображен выполненный в варианте А управляемый преобразователь с двумя эксцентриками 3 и 4, при этом дается вид спереди с разрезом по центру. На фигуре 2 элемент 11 не фиксирует ползун 1, и тот способен совершать возвратно-поступательные движения по направляющим 2.
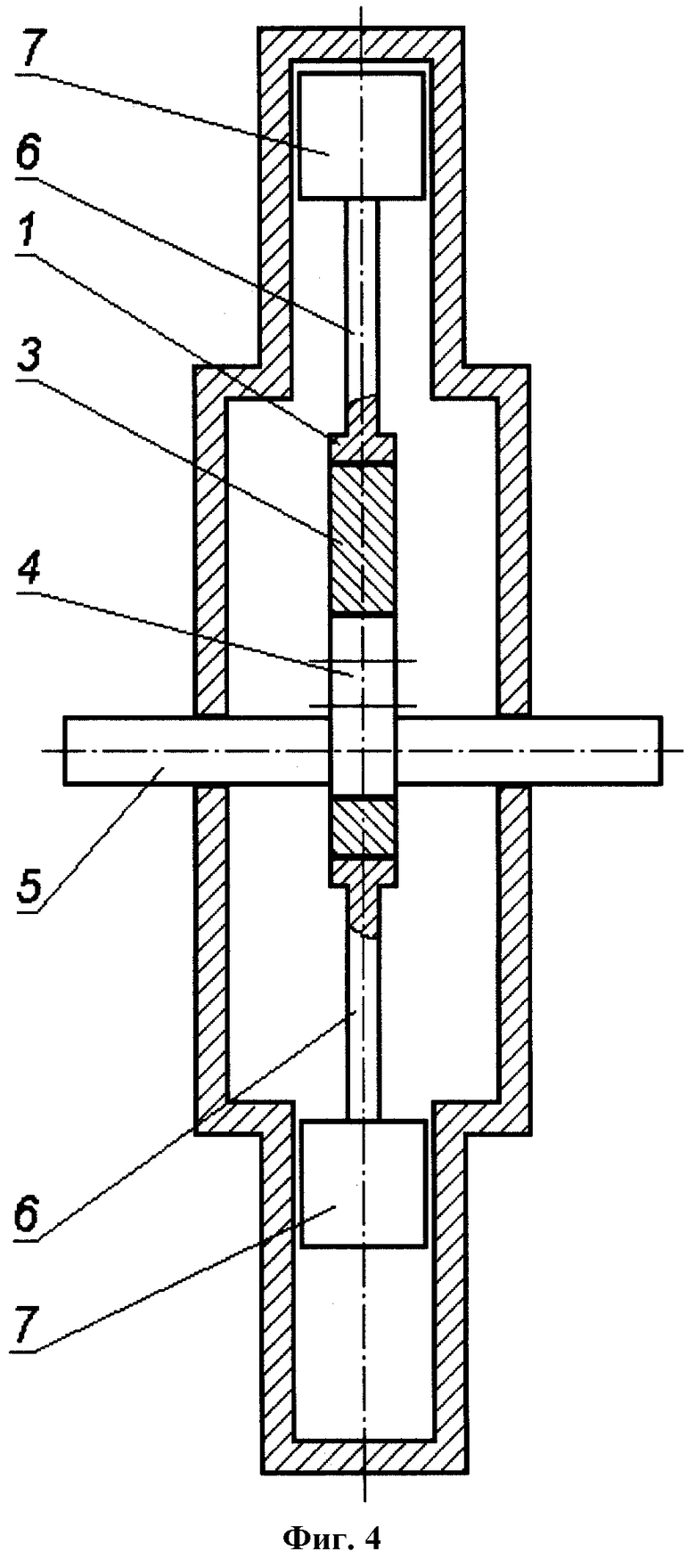
На фигуре 4 показан вид механизма по варианту А сбоку с разрезом по центру, при этом вал 5 и эксцентрик 4 для лучшего понимания конструкции условно изображены без разреза.
На фигуре 3 также изображен вариант А управляемого преобразователя движения с двумя эксцентриками 3 и 4 (вид спереди с разрезом по центру), но элемент 11 в данном случае фиксирует ползун 1 в неподвижном положении, однако вал 5 сохраняет способность совершать вращательные движения за счет других приводов.
Управляемый преобразователь движения, показанный на фигурах 2-4, работает следующим образом.
При преобразовании возвратно-поступательного движения во вращательное возвратно-поступательное движение ползуна 1 сообщает эксцентрику 3 вращательное движение, эксцентрик 3, вращаясь вокруг эксцентрика 4, передает ему вращательное движение противоположного направления. В свою очередь, эксцентрик 4 передает валу 5 вращательное движение.
При преобразовании вращательного движения в возвратно-поступательное вращательное движение вала 5, связанного с эксцентриком 4, передает эксцентрику 3 вращательное движение противоположного вращению вала 5 направления. Вращение эксцентрика 3 относительно эксцентрика 4 сообщает ползуну 1 возвратно-поступательное движение.
В качестве примера управляемое стопорное устройство 11 выполнено с возможностью, при его активации, фиксировать привод возвратно-поступательного движения путем фиксации ползуна 1. Как показано на фигуре 3, ползун не способен совершать возвратно-поступательные движения. При этом вал 5 может совершать вращательное движение в шарнирном соединении между эксцентриком 3 и ползуном 1 за счет внешних приводов.
Управляемое стопорное устройство, которое на фигуре 3 (вариант А) в качестве примера показано как механический элемент 11, способно фиксировать привод возвратно-поступательного движения, в частном случае - путем фиксации ползуна, при сохранении у вала возможности вращения, когда ось вращения вала совпадает с геометрической осью большого эксцентрика 3.
Как показано на фигуре 3 (вариант А), ползун не способен совершать возвратно-поступательные движения. При этом вал 5 может совершать вращательное движение в шарнирном соединении между эксцентриком 3 и ползуном 1 за счет внешних приводов.
Таким образом, может происходить выключение привода возвратно-поступательного движения в управляемом преобразователе движения по варианту А.
Для включения привода возвратно-поступательного движения необходимо, чтобы механический элемент 11 перестал фиксировать ползун 1, т.е. занял положение, не препятствующее движению ползуна (см. механический элемент 11 на фигуре 2). Кроме того, ползуну 1 должно быть сообщено поступательное движение, выводящее его из статического состояния. Такое движение может быть сообщено ползуну за счет действия, например, силы тяжести (при его вертикальном положении), внешнего привода, например, с использованием толкателя, дополнительно наложенных на детали механических связей типа ограничений, например, включением в конструкцию преобразователя деталей, способных допустить вращение большого эксцентрика и вала только во взаимно-противоположных направлениях и, таким образом, включающих привод возвратно-поступательного движения при сообщении валу вращательного движения.
Включение привода возвратно-поступательного движения, также как и его выключение, должно происходить, когда ось вращения вала совпадает с геометрической осью большого эксцентрика 3 (например, см. фигуру 3).
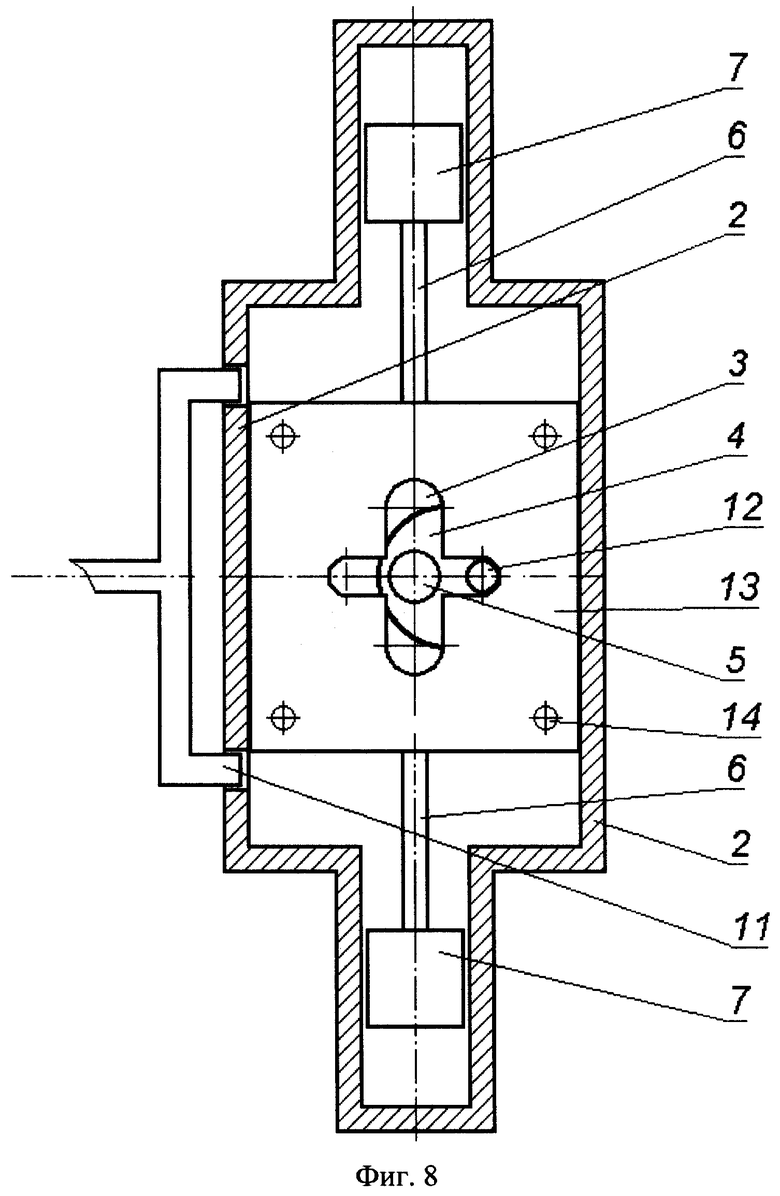
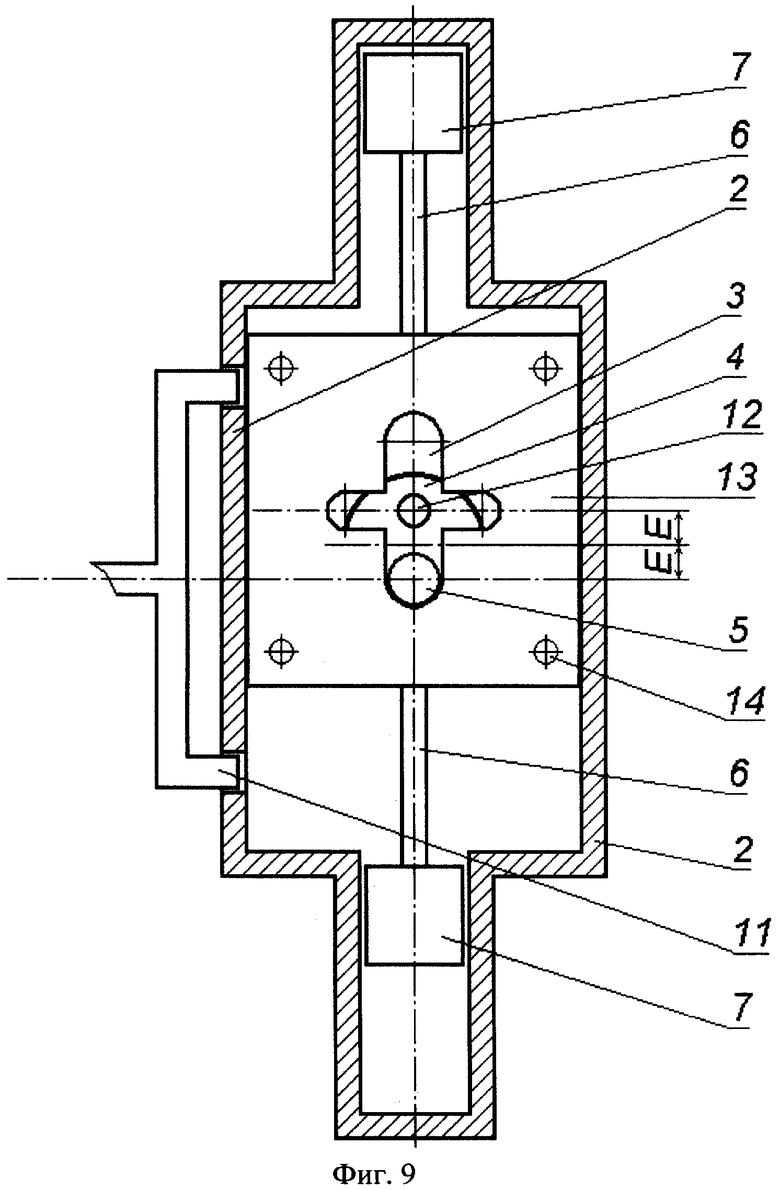
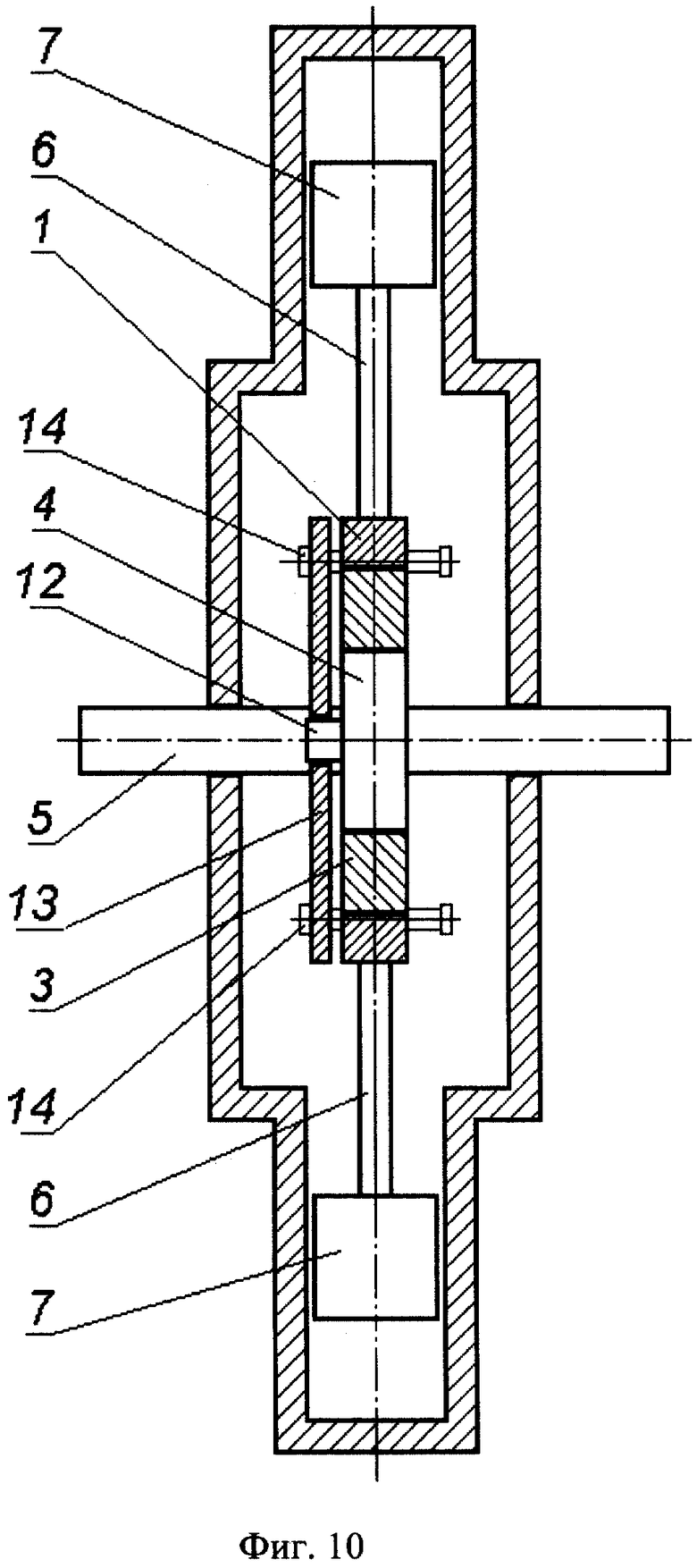
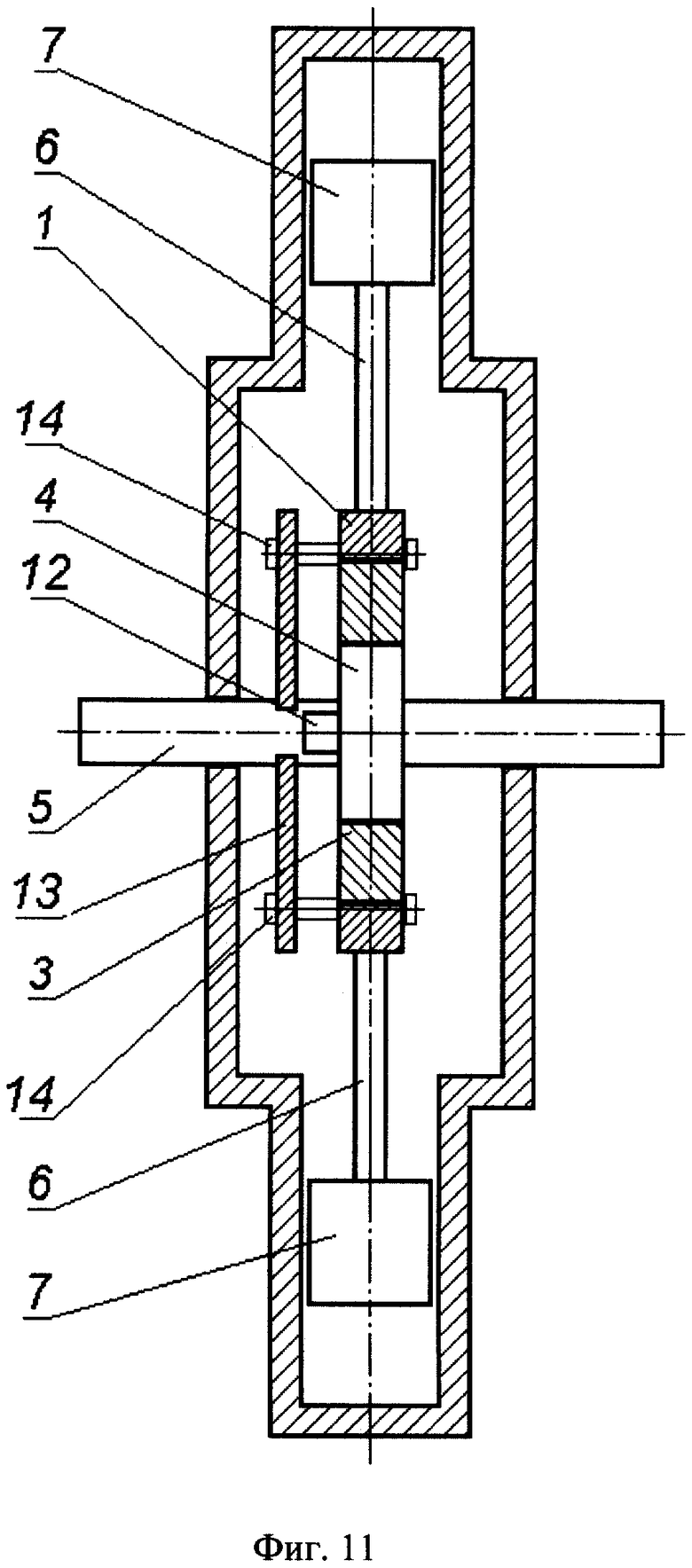
Примером включения в конструкцию преобразователя деталей, способных допустить вращение большого эксцентрика и вала только во взаимно-противоположных направлениях при незафиксированном приводе возвратно-поступательного движения для варианта А управляемого преобразователя, может служить конструкция, изображенная на фигурах 8, 9, 10 и 11, которая является одним из многих возможных вариантов реализации изобретения.
На фигурах 8-11 цифрами обозначены:
1 - ползун (на фигурах 8, 9 не показан);
2 - направляющие (на фигурах 10, 11 не показаны);
3 - эксцентрик большой;
4 - эксцентрик малый;
5 - вал;
6 - шток;
7 - поршень;
11 - механический элемент, способный фиксировать ползун (на фигурах 10 и 11 он не показан);
12 - шип, жестко закрепленный на оси симметрии малого эксцентрика 4;
13 - ограничительная пластина;
14 - крепеж ограничительной пластины.
При этом на фигурах 8, 9 приводится вид спереди с разрезом по центру, а на фигурах 10, 11 - вид сбоку с разрезом по центру, а вал 5 и эксцентрик 4 для лучшего понимания конструкции условно изображены без разреза.
Ограничительная пластина 13, которая закреплена на ползуне посредством крепежных элементов 14, может занимать два положения. В положении пластины, показанном на фигуре 10, она способна при приведении во вращение вала 5 посредством воздействия на нее шипа 12 привести в возвратно-поступательное движение ползун 1 при отключенном фиксирующем элементе 11 и, тем самым, сообщить большому эксцентрику вращение взаимно-противоположного вращению вала направления, включив привод возвратно-поступательного движения. Ограничительная пластина 13, таким образом, может допустить вращение большого эксцентрика и вала только во взаимно-противоположных направлениях при незафиксированном приводе возвратно-поступательного движения.
На фигуре 11 показана ограничительная пластина 13 в положении, не ограничивающем перемещения эксцентрика 4 через шип 12, и допускающая вращение эксцентрика 4 при неподвижном ползуне 1, который может быть остановлен фиксирующим элементом 11. Таким образом, отключается привод возвратно-поступательного движения.
На фигуре 5 изображен вариант Б реализации управляемого преобразователя движения с эксцентриком 10, осью вращения которому служит шип 8 кривошипного вала 9 (вид спереди с разрезом по центру).
На фигуре 5 элемент 11 не фиксирует ползун 1, и тот способен совершать возвратно-поступательные движения по направляющим.
Шип 8 кривошипного вала 9 смещен относительно оси вращения кривошипного вала на величину Е, равную эксцентриситету эксцентрика 10.
На фигуре 7 показан вид механизма по варианту Б сбоку с разрезом по центру, при этом шип кривошипного вала 8 и кривошипный вал 9 для лучшего понимания конструкции условно изображены без разреза).
На фигуре 6 также изображен вариант Б управляемого преобразователя движения с эксцентриком 10, осью вращения которому служит шип 8 кривошипного вала 9 (вид спереди с разрезом по центру), но элемент 11 в данном случае фиксирует ползун 1 в неподвижном положении, однако кривошипный вал 9 сохраняет способность совершать вращательные движения за счет других приводов.
Управляемый преобразователь движения, показанный на фигурах 5-7, работает следующим образом.
При преобразовании возвратно-поступательного движения во вращательное, возвратно-поступательное движение ползуна 1 сообщает эксцентрику 10 вращательное движение, эксцентрик 10, вращаясь вокруг шипа 8 кривошипного вала 9, передает ему вращательное движение противоположного направления.
При преобразовании вращательного движения в возвратно-поступательное, вращательное движение кривошипного вала 9 с шипом 8 передает эксцентрику 10 вращательное движение противоположного вращению вала 9 направления. Вращение эксцентрика 10 относительно шипа 8 сообщает ползуну 1 возвратно-поступательное движение.
В качестве примера управляемое стопорное устройство 11 выполнено с возможностью при его активации фиксировать привод возвратно-поступательного движения путем фиксации ползуна 1. Как показано на фигуре 6, ползун не способен совершать возвратно-поступательные движения. При этом вал 9 может совершать вращательное движение в шарнирном соединении между эксцентриком 10 и ползуном 1 за счет внешних приводов.
Таким образом, может происходить выключение привода возвратно-поступательного движения в управляемом преобразователе движения по варианту Б.
Для включения привода возвратно-поступательного движения необходимо, чтобы механический элемент 11 перестал фиксировать ползун 1, т.е. занял положение, не препятствующее движению ползуна (см. механический элемент 11 на фигуре 5). Кроме того, ползуну 1 должно быть сообщено поступательное движение, выводящее его из статического состояния. Такое движение может быть сообщено ползуну за счет действия, например, силы тяжести при его вертикальном положении, внешнего привода, дополнительно наложенных на детали управляемого преобразователя движения механических связей типа ограничений, например, включением в конструкцию преобразователя деталей, способных допустить вращение большого эксцентрика и вала только во взаимно-противоположных направлениях и, таким образом, включающих привод возвратно-поступательного движения при сообщении валу вращательного движения.
Включение привода возвратно-поступательного движения так же, как и выключение, должно происходить, когда ось вращения кривошипного вала 9 совпадает с геометрической осью эксцентрика 10 (например, см. фигуру 6).
Для варианта Б примером включения в конструкцию преобразователя деталей, способных допустить вращение большого эксцентрика и вала только во взаимно-противоположных направлениях при незафиксированном приводе возвратно-поступательного движения может служить конструкция, аналогичная приведенной выше для варианта А и изображенная на фигурах 8, 9, 10 и 11.
Как видно из вышеприведенного описания, заявляемый управляемый преобразователь движения может изготавливаться на существующей производственной базе.
Принципиально новым элементом, отличающим заявляемую конструкцию от аналогов и прототипа, является возможность управления преобразованием движения для остановки или изменения направления движения деталей механизма при сохранении у вала способности вращаться, например, за счет других приводов. Что дает возможность, например, блокировки и подключения отдельных механизмов, приводимых одним валом или приводящих один вал.
Привод, т.е. система управления стопорным устройством преобразователя, может быть ручной, полуавтоматической и автоматической, построенной, например, с использованием микропроцессорных технологий. Представляется целесообразным, при использовании управляемого преобразователя движения, например в поршневом двигателе, чтобы устройство управления преобразователем движения имело управление логически взаимосвязанное с работой других систем поршневого двигателя или транспортного средства, в котором данный двигатель установлен в качестве привода.
При этом в управляемый преобразователь движения может быть встроена система технической диагностики для обнаружения и локализации дефектов деталей механизма, для предсказания возможных отклонений в режимах их работы или состояниях. Систему диагностики предпочтительно конструировать с использованием микропроцессорных технологий и измерительных преобразователей, т.е. датчиков, различной природы.
При этом нет никаких препятствий для организации управления и диагностики как преобразователя движения, так и поршневого двигателя, посредством телекоммуникационной системы с использованием информационных технологий.
Как отмечается в [2], «построенные бесшатунные двигатели по сравнению с аналогичными кривошипно-шатунными двигателями равной мощности имеют в несколько раз меньшие габариты», следовательно, создается возможность, применив заявляемое изобретение, создать двигатель, минимизировав один из трех его размеров: или высоту, или длину, или ширину. Таким образом, можно создать, например, плоский двигатель, который можно было бы разместить, например, под днищем автомобиля.
Отмечаем также, что управляемый преобразователь движения заявляемой конструкции может быть применен, например:
- В поршневых двигателях, за счет отключения и включения преобразования движения, отдельными механизмами можно изменять количество работающих поршней, меняя тем самым другие характеристики двигателя, например - его мощность. Таким образом, появляется возможность создания унифицированных двигателей для различных классов транспортных средств.
- В поршневых насосах и компрессорах для изменения производительности при работе от одного привода вращения, т.е. от одного двигателя.
- В деревообрабатывающих и металлообрабатывающих станках для получения возможности отключения отдельных режущих инструментов при сохранении вращения приводящего вала с целью изменения способа обработки заготовки, например, для привода резцов в фанерострогальных станках, привода лесопильных станков, привода долбежных станков.
- В сельскохозяйственном оборудовании в качестве отключаемого привода рабочих органов механизмов. Например, в брикетировщике кормов данный механизм может быть применен для привода штемпеля брикетных камер.
- В оборудовании текстильной промышленности для привода механизмов формирования материала, например, для отключения не используемых в работе нитеводителей ткацкого станка.
- Для привода рабочих органов машин, применяемых в горном деле, например, для привода бара во врубовых машинах.
- В гидравлических и пневматических приводах машин, гидравлических и пневматических двигателях, в устройствах преобразования энергии, например, для снятия мощности с поршней машины, преобразующей энергию потока жидкости в механическую энергию ведомого звена типа вала или штока.
- В кузнечно-штамповочном производстве для привода рабочих органов машин, например, для приводов штампов кривошипного пресса, с возможностью отключения отдельных приводов.
Вышеописанные примеры реализации заявляемого изобретения приведены в качестве иллюстрации, и специалистам должно быть понятно, что настоящим заявляется также охрана и иных вариантов реализации, предусматривающих дополнение или замену отдельных элементов механизма в той мере, в какой такая охрана не превышает объема раскрытия изобретения в формуле изобретения, в описании и чертежах.
Изобретение относится к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот и может быть использовано в поршневых двигателях, поршневых насосах и компрессорах. Согласно первому варианту выполнения преобразователь включает в себя, по меньшей мере, два помещенных один в другой эксцентрика разного диаметра и одинакового по величине эксцентриситета. Малый эксцентрик жестко закреплен на валу вращения и служит осью большому эксцентрику, шарнирно связанному с ползуном. Согласно второго варианта преобразователь включает в себя эксцентрик, осью вращения которого служит шип кривошипного вала, смещенный относительно оси вращения кривошипного вала на величину эксцентриситета эксцентрика. Эксцентрик шарнирно соединен ползуном. В обоих вариантах преобразователь дополнительно содержит управляемое стопорное устройство, выполненное с возможностью при его активации фиксировать привод возвратно-поступательного движения, при сохранении у вала возможности вращения. Достигается преобразование или изменение направления движения деталей при сохранении у вала способности вращаться, например, за счет других приводов. 2 н. и 6 з.п. ф-лы, 11 ил.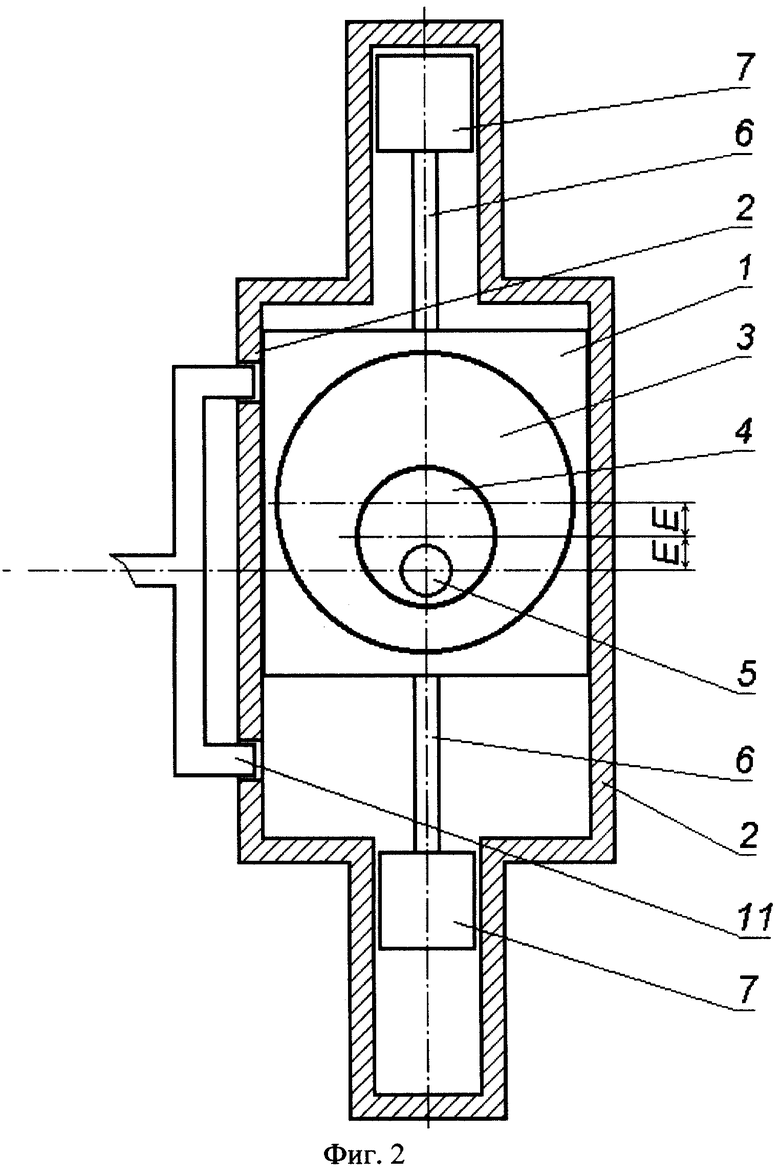
| БЕСШАТУННЫЙ МОДУЛЬНЫЙ ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С СИЛОВЫМ МЕХАНИЗМОМ ЭКСЦЕНТРИКОВОГО ТИПА | 2002 |
|
RU2212552C1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ ПОРШНЕВОЙ МАШИНЫ | 1995 |
|
RU2107204C1 |
| DE 10243023 A, 25.03.2004 | |||
| Эксцентриковый механизм Митрофанова А.А. | 1986 |
|
SU1573271A1 |
| DE 10242228 A, 25.03.2004 | |||
| US 6631671 A, 14.10.2003. | |||

