Изобретение относится к машиностроению и может быть использовано в различных машинах и механизмах, в частности в бесшатунных поршневых двигателях, компрессорах, а также в планетарных, в том числе дифференциальных, передачах различного назначения.
Известен способ преобразования движения в кулисном механизме, заключающийся в преобразовании возвратно-поступательного движения во вращательное (и обратно), когда осуществляется одновременное вращение двух звеньев, в данном случае кулисы и соединительного элемента, относительно собственных неподвижных осей, такое вращение называется биротационным (патент Великобритании N 2038984 A, 1979).
Известны устройства, в которых осуществляется бесшатунное преобразование возвратно-поступательного движения в планетарное вращательное (и наоборот). Такое устройство содержит неподвижный корпус с двумя или более непараллельными прямолинейными направляющими, одинарные передний и задний кривошипы, закрепленные концевыми шипами шарнирно в неподвижном корпусе, по меньшей мере два ползуна, каждый из которых размещен в направляющих, и соединительное звено, выполненное в виде двуплечего кривошипа, плечи которого шарнирно соединены с ползунами, а шипы - с одинарными кривошипами (Баландин С.С. "Бесшатунные поршневые двигатели внутреннего сгорания" М., Машиностроение, 1968 и Кожевников С. Н. и др. Механизмы. М., Машиностроение, 1976, с. 90, фиг. 2.117).
Недостатком известных способов преобразования движения в кулисном механизме является то, что в них возвратно-поступательное движение ползунов преобразуется либо в биротативное вращение кулисного и соединительного элементов относительно их собственных осей Ос и Ок, либо в планетарное движение из указанных элементов относительно оси другого неподвижного элемента. Наиболее близким техническим решением к предложенному способу является способ преобразования движения в кулисном механизме, содержащем кулисный элемент, имеющий не менее двух непараллельных установленных на оси направляющих со скользящими в них ползунами, и соединительный элемент, установленный на оси и шарнирно связанный с ползунами, заключающийся в обеспечении вращения по крайней мере одного из упомянутых элементов вокруг своей оси (Баландин С.С. "Бесшатунные поршневые двигатели внутреннего сгорания", М., Машиностроение, 1968).
В известном устройстве с одной независимой степенью свободы вращательного движения двуплечий кривошип шарнирно закреплен своими серединными шейками на коленах одинарных кривошипов и коленными шейками в штоках ползунов, двигающихся поступательно в направляющих неподвижного корпуса.
Известный способ обладает недостаточной кинематической эффективностью преобразования движения, заключающейся только в преобразовании возвратно-поступательного движения во вращательное и обратно и получении при этом только одной независимой степени свободы однонаправленного вращательного движения выходного вала, выполненного из двух одинарных полукривошипов, что требует введения дополнительной механической связи, обеспечивающей синхронизацию вращения полукривошипов в условиях их не одинакового нагружения.
Задачей, на решение которой направлено изобретение, является разработка способа преобразования движения в кулисном механизме, обеспечивающего высокую эффективность кинематического преобразования, обусловленную увеличенным механическим КПД, увеличенным до двух числом независимых степеней свободы, увеличенным количеством функциональных кинематических возможностей, в частности: возможность преобразования возвратно-поступательного движения во вращательное одного знака и обратно; получение одновременно двух противоположно направленных вращательных движений, синхронизированных по углу поворота при преобразовании возвратно-поступательного движения во вращательное; инвертирование (изменение знака) направления вращения при преобразовании устройством вращательного движения во вращательное; "расщепление" вращения, т. е. преобразование одностороннего вращательного движения ведущего звена во вращательное контрроторное вращение (вращение двух ведомых соосных звеньев с одинаковой угловой скоростью, но в противоположных направлениях); редуцирование скорости вращения; обеспечение режимов работы устройства в качестве дифференциала контрроторной электрической, лопастной, объемной трохоидной или объемной поршневой бесшатунной машины, с уменьшенными потерями на трение скольжения.
Для достижения технического результата, указанного выше, в известном способе преобразования движения в кулисном механизме, содержащем ползуны, кулисный элемент, установленный на оси и выполненный в виде по меньшей мере двух непараллельных направляющих со скользящими в них упомянутых ползунами, и соединительный элемент, установленный на оси и шарнирно связанный с ползунами, заключающийся в обеспечении вращения по крайней мере одного из упомянутых элементов вокруг своей оси, осуществляют одновременное вращение оси одного из элементов относительно введенной основной оси и оси другого элемента относительно оси первого элемента и вращение обоих элементов вокруг своих осей, при этом осуществляют синхронизацию угловых скоростей планетарного и вращательного движений.
Кроме этого, при совмещении основной оси с осью вращения одного из элементов, или с осью шарниров ползунов, или с центром масс куличного механизма сообщают кулисному и соединительному элементам вращение с угловым скоростями, определяемыми из соотношения W0 + W2 - 2W1 = 0, где W1, W2 - угловые скорости вращения кулисного и соединительного элементов относительно своих осей, W0 - угловая скорость вращения оси одного элемента относительно оси другого элемента.
Наиболее близким аналогом предполагаемого изобретения на устройство является кулисный механизм, принятый в качестве прототипа и содержащий корпус, в котором расположены кулисный элемент, имеющий не менее двух непараллельных установленных на оси направляющих со скользящими в них ползунами, и установленный на оси соединительный элемент, шарнирно связанный с ползунами (авт. св. СССР N 1052763, F 16 H 21/16, 1983).
Известное устройство обладает недостаточной кинематической эффективностью преобразования движения, обусловленной получением только одной независимой степени свободы - планетарного движения одного из основных звеньев кулисного механизма, в данном случае соединительного элемента.
Задачей, на решение которой направлено изобретение, является разработка кулисного механизма с повышенным механическим КПД, обладающего двумя независимыми степенями свободы, широкими функциональными возможностями, в частности: возможностью преобразования возвратно-поступательного движения во вращательное одного знака и обратно; получения одновременно двух противоположно направленных вращательных движений, синхронизированных по углу поворота при преобразовании возвратно-поступательного движения во вращательное; инвертирование (изменение знака) направления вращения при преобразовании устройством вращательного движения во вращательное; "расщепление" вращения, т.е. преобразование одностороннего вращательного движения ведущего звена во вращательное контрроторное вращение (вращение двух ведомых соосных звеньев с одинаковой угловой скоростью, но в противоположных направлениях); редуцирование скорости вращения; обеспечение режимов работы устройства в качестве: дифференциала, контрроторной электрической, лопастной, объемной трохоидной или объемной поршневой бесшатунной машины с уменьшенными потерями на трение скольжения.
Указанный выше технический результат достигается тем, что известный кулисный механизм, содержащий корпус, ползуны, кулисный элемент, установленный на оси и выполненный в виде не менее двух непараллельных направляющих, на которых установлены ползуны, и соединительный элемент, установленный на оси и связанный посредством шарниров с ползунами, снабжен основным валом и синхронизатором, связанным с одной стороны с основным валом или корпусом, а с другой стороны - по крайней мере с ползуном, или кулисным элементом, или с соединительным элементом, или с двумя из них и по крайней мере один из упомянутых элементов или ползунов установлен шарнирно в синхронизаторе с возможностью обеспечения двух степеней свободы - вращения вокруг основного вала и обеспечения при этом дополнительного планетарного вращения любого одного элемента относительно основного вала и планетарного вращения второго элемента относительно оси первого элемента.
Кроме этого, ось основного вала может быть совмещена с осью кулисного элемента, или осью соединительного элемента, или осью шарнира одного из ползунов, или с центром масс кулисного механизма, синхронизатор выполнен в виде по меньшей мере одного звена, а угловые скорости дифференциальных вращений двух вышеупомянутых элементов вокруг своих осей и одного из звеньев синхронизатора определяются из соотношения k1W1 + k2W2 + W3 = 0, где W1, W2 - скорости вращения вышеупомянутых элементов вокруг своих осей, W3 - скорость вращения звена синхронизатора, k1, k2 - постоянные коэффициенты связи, при этом любые два из трех вышеупомянутых частей механизма - двух элементов и звена синхронизатора, установлены с возможностью независимого вращения друг от друга.
Кроме этого, синхронизатор может иметь дополнительную кинематическую цепь, связанную с любыми двумя из следующих частей механизма - кулисным элементом, соединительным элементом, одним из звеньев синхронизатора, корпусом с возможностью уменьшения количества независимых степеней свободы кулисного механизма на единицу.
Кроме этого, синхронизатор, или ползуны, или кулисный элемент, или соединительный элемент могут быть установлены в корпусе с возможностью вращения или заторможены относительно корпуса.
Кроме этого, синхронизатор может иметь механизм относительного кругового поступательного движения, связанный по крайней мере с кулисным элементом, или соединительным элементом, или одновременно с обоими этими элементами или с корпусом.
Кроме этого, синхронизатор может иметь два инвертора направления вращения, входы которых через введенные дополнительные кривошипы связаны с соединительным элементом, или по крайней мере с ползунами, или кулисным элементом.
Кроме этого, синхронизатор может быть снабжен опорной рамой, в которой установлен с возможностью вращения синхронизатор, или один из ползунов, или кулисный элемент, или соединительный элемент, при этом синхронизатор выполнен в виде механизма относительно кругового поступательного движения, связанного с рамой и с одним из оставшихся из упомянутых выше ползунов, или кулисного элемента, или соединительного элемента с возможностью обеспечения их относительного кругового поступательного движения.
Кроме этого, механизм может быть снабжен механизмами передачи вращения, связанными по крайней мере с ползунами, или с кулисным элементом, или соединительным элементом, или с синхронизатором, при этом одна из осей каждого из упомянутых механизмов расположена соосно оси основного вала.
Кроме этого, механизм может быть снабжен водилом, установленным с возможностью соединения между собой с одной стороны корпуса или синхронизатора, а с другой стороны ползуна, или кулисного элемента, или соединительного элемента с возможностью обеспечения при этом планетарного движения соединяемых частей относительно друг друга.
Кроме этого, механизм может быть снабжен дополнительным ползуном и штоком, на котором оппозитно расположены ползуны, скользящие в направляющих, при этом дополнительный ползун установлен на штоке с возможностью скольжения между ползунами и шарнирно связан с соединительным элементом, или с одним из звеньев синхронизатора, или с основным валом.
Кроме этого, связь соединительного или кулисного элемента с корпусом или основным валом может быть выполнена в виде инвертора направления приращения.
Кроме этого, корпус установлен с возможностью вращения относительно основного вала, водило размещено в корпусе соосно с ним, при этом установленный на водиле с возможностью вращения кулисный элемент, или по меньшей мере один из ползунов, или соединительный элемент связан посредством синхронизатора с корпусом.
Кроме этого, любые два из следующих вращающихся частей механизма: ползуны, кулисный элемент, соединительный элемент, звено синхронизатора могут быть кинематически связаны с двумя вращающимися элементами внешних устройств.
Кроме этого, ползуны могут быть связаны с поршнями или с цилиндрами объемной машины, а направляющие - с их цилиндрами или поршнями соответственно.
Сущность способа преобразования движения в кулисном механизме и его конструкция поясняются следующими чертежами.
На фиг. 1 изображена схема, поясняющая сущность способа преобразования движения в кулисном механизме.
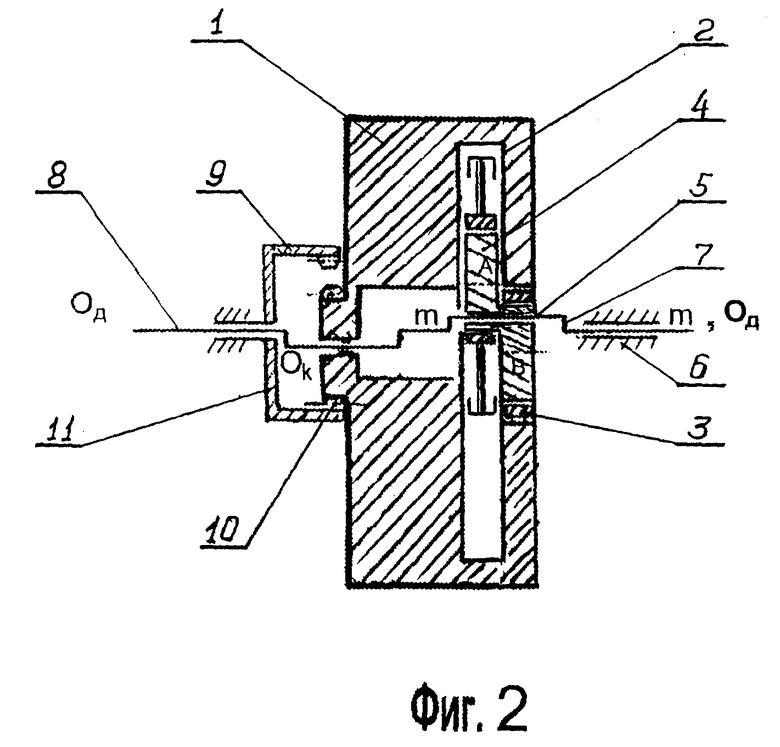
На фиг. 2 - кулисный механизм.
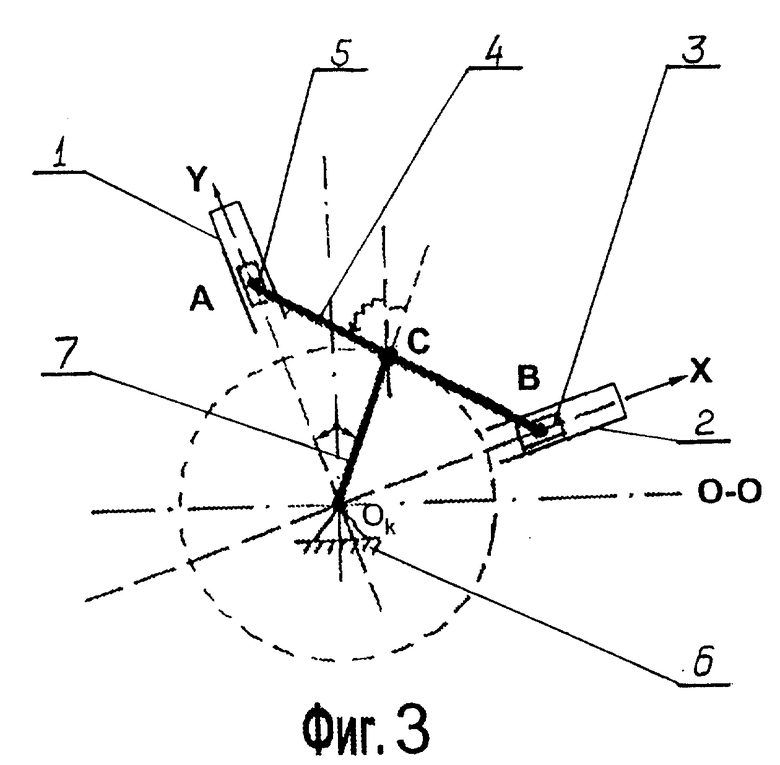
На фиг. 3 - схема, поясняющая способ преобразования движения в кулисном механизме при совмещении основной оси с осью направляющих кулисного элемента при планетарном движении соединительного элемента.
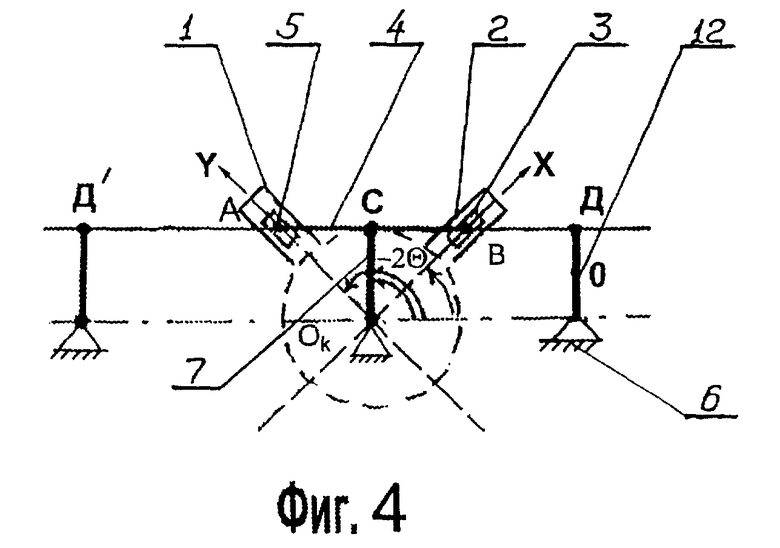
На фиг. 4 - схема, поясняющая способ преобразования движения в кулисном механизме при совмещении основной оси с осью кулисного элемента при круговом поступательном движении соединительного элемента.
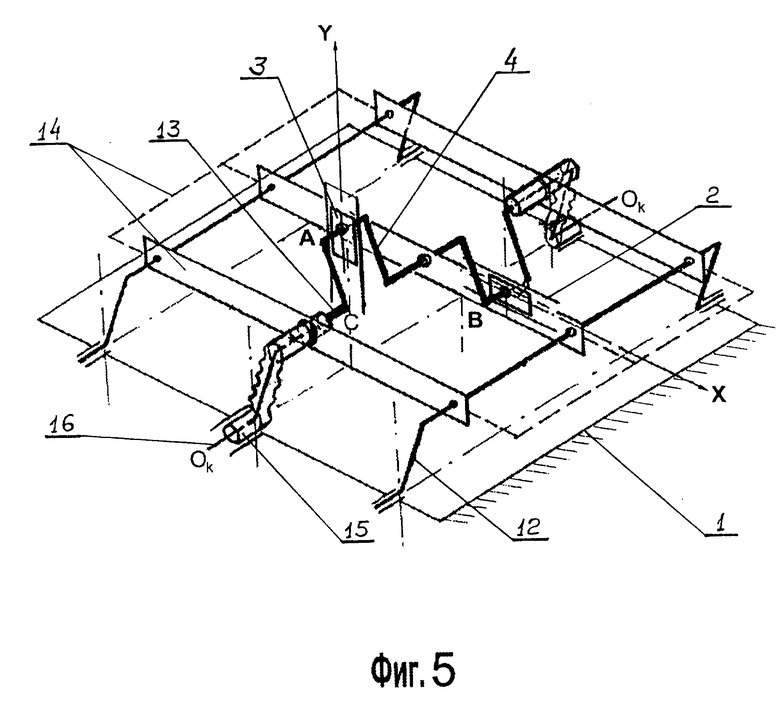
На фиг. 5 - вариант выполнения кулисного механизма в виде "расщепителя" вращения.
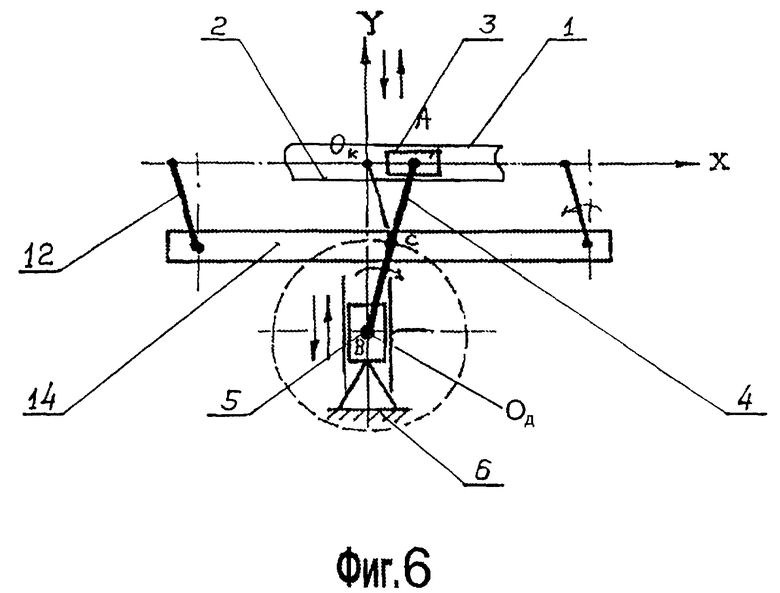
На фиг. 6 - схема, поясняющая способ преобразования движения в кулисном механизме при совмещении основной оси с осью шарнира неподвижного ползуна.
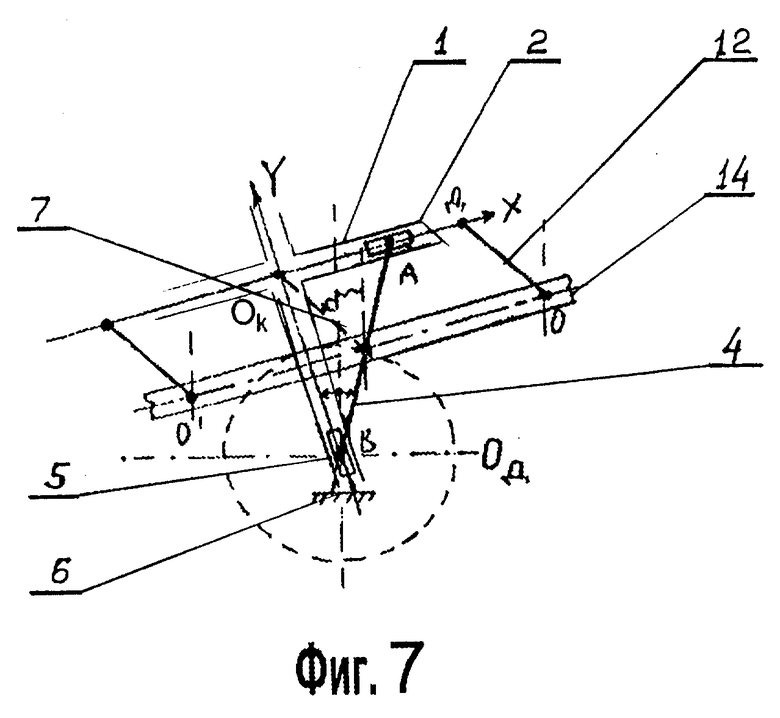
На фиг. 7 - схема, поясняющая способ преобразования движения в кулисном механизме при совмещении основной оси с осью ползуна, вращающегося совместно с кулисным элементом.
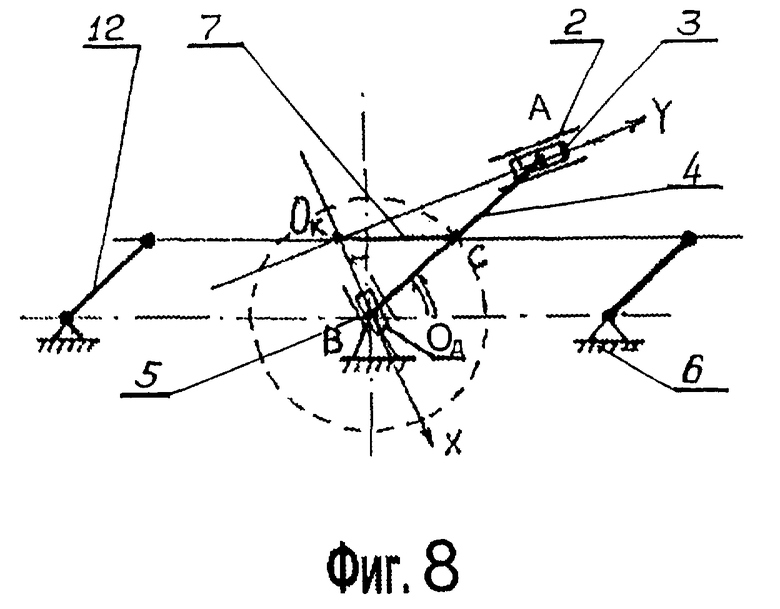
На фиг. 8 - диаграмма, поясняющая способ преобразования движения в кулисном механизме при совмещении основной оси с осью ползуна и круговым поступательным движением водила.
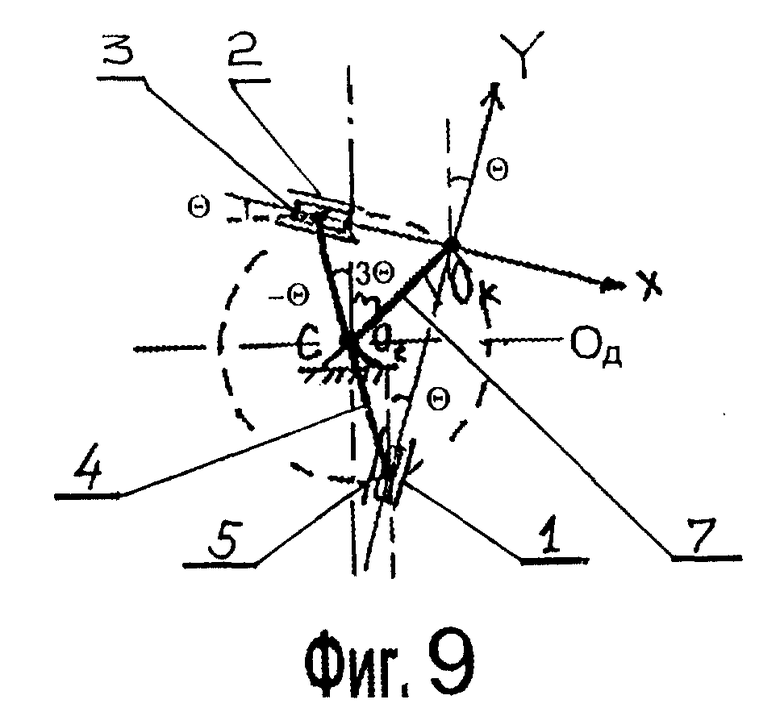
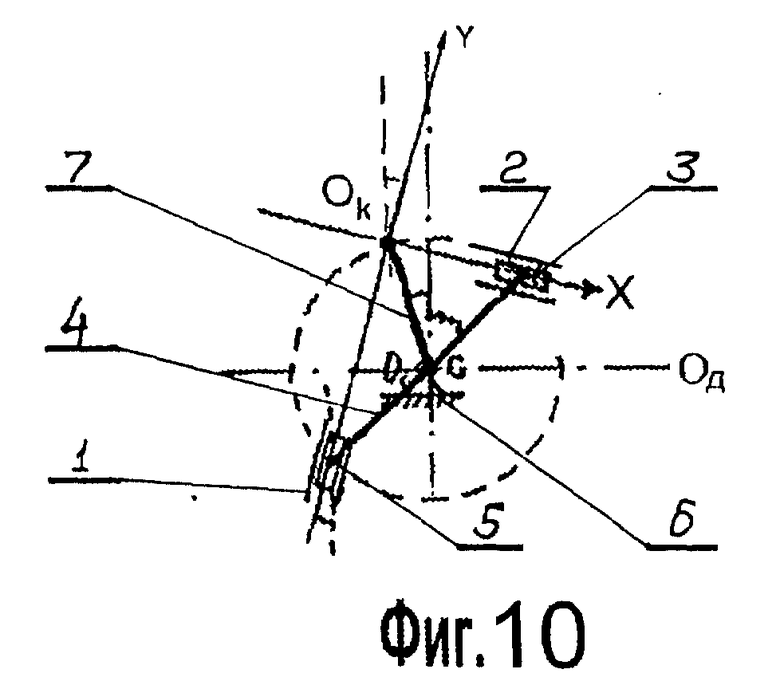
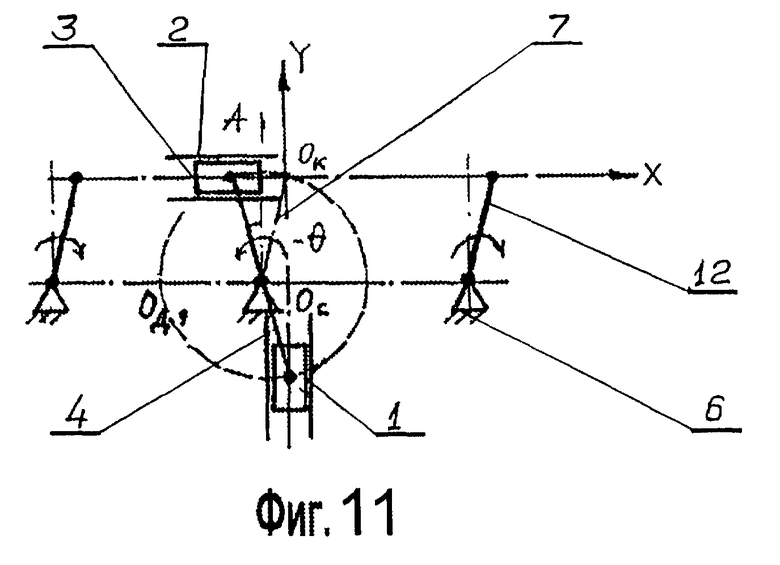
На фиг. 9, фиг. 10 и фиг. 11 - схемы, поясняющая способ преобразования движения в кулисном механизме при совмещении основной оси с осью соединительного элемента при планетарном (фиг. 9, фиг. 10) и круговом поступательном (фиг. 11) движении кулисного элемента относительно основной оси.
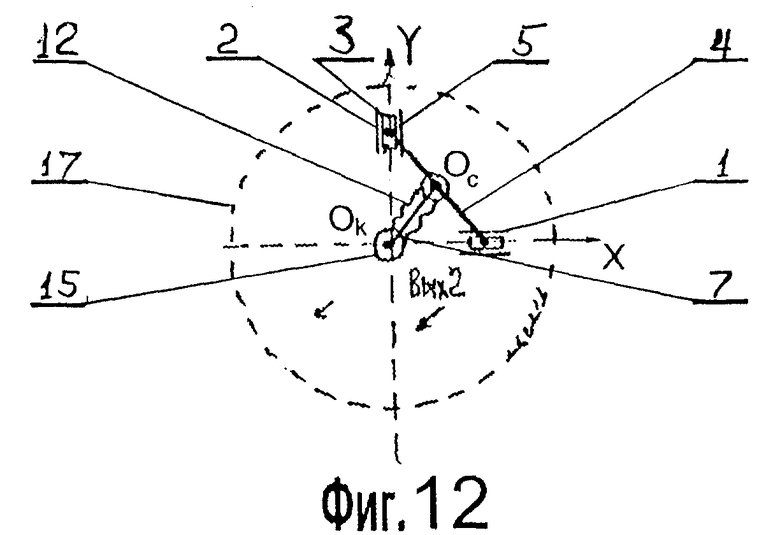
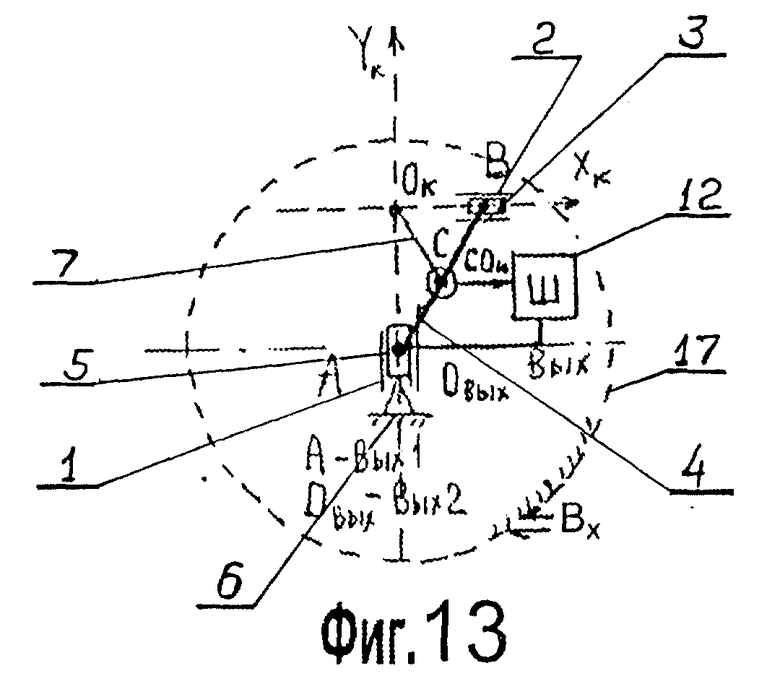
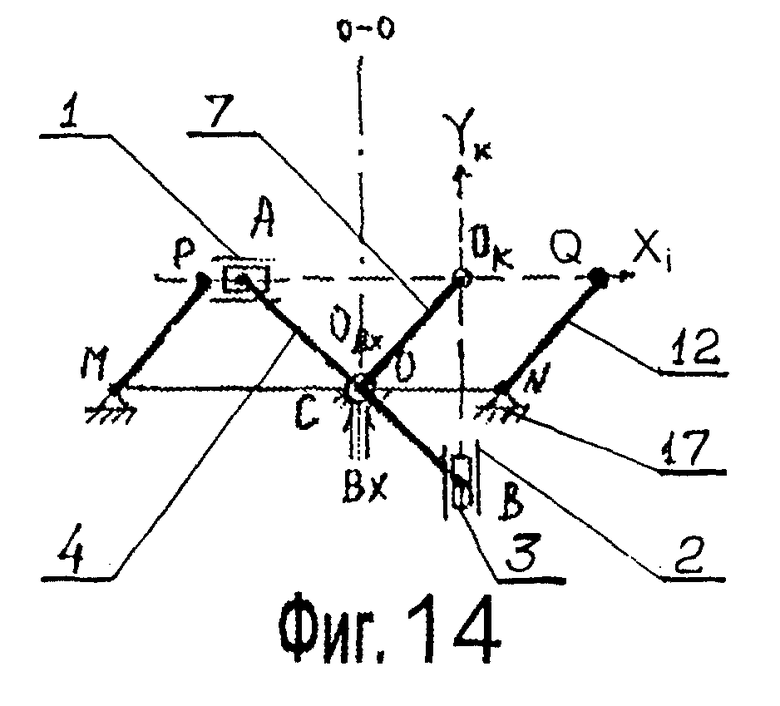
На фиг. 12, фиг. 13 и фиг. 14 - схемы, поясняющие способ преобразования движения в дифференциальном кулисном механизме, при совмещении основной оси с осью направляющих кулисного элемента (фиг. 12), с осью ползуна (фиг. 13) и осью соединительного элемента (фиг. 14).
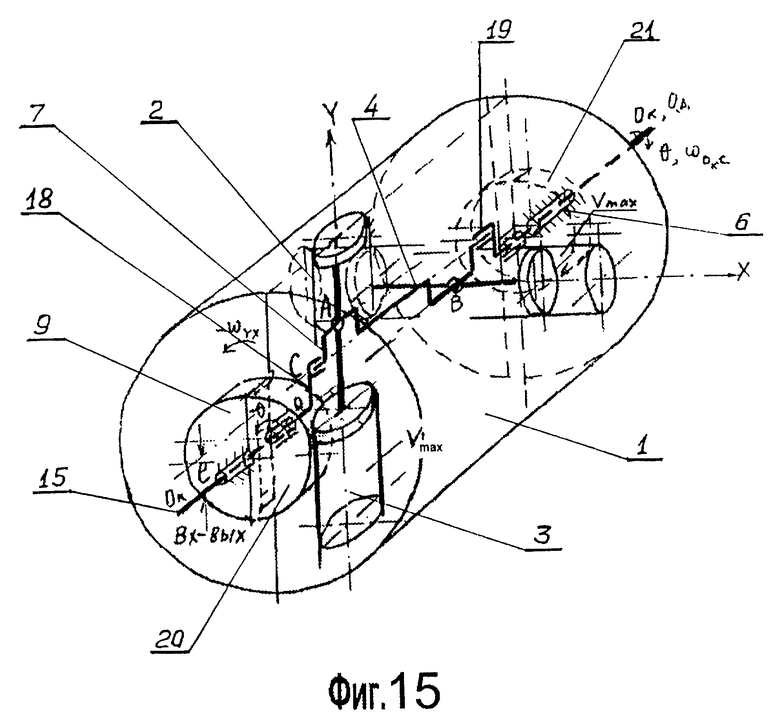
На фиг. 15 схематично изображен вариант кулисного механизма, выполненного в виде объемной машины с двумя инверторами направления вращения.
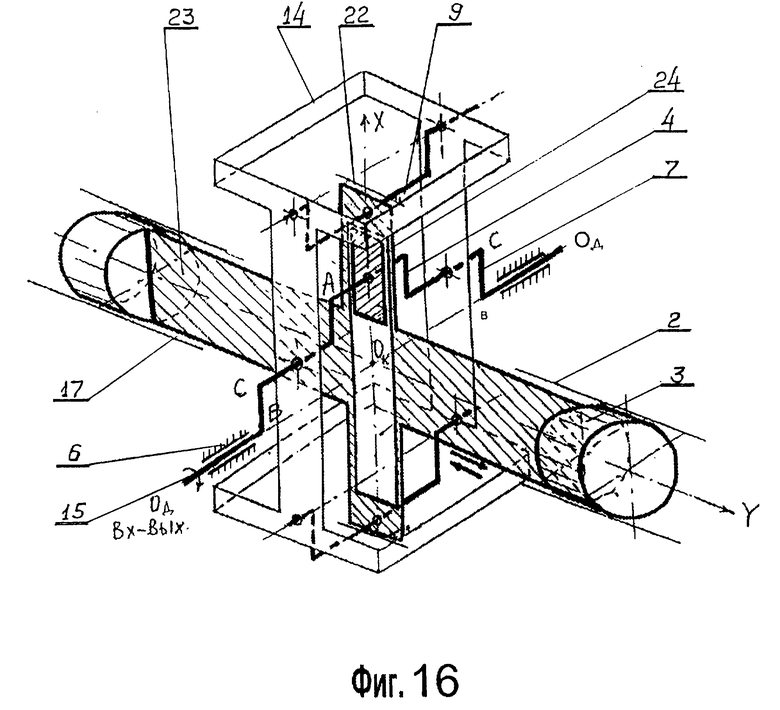
На фиг. 16 - вариант выполнения кулисного механизма в виде объемной машины с опорной рамой и разгруженным ползуном.
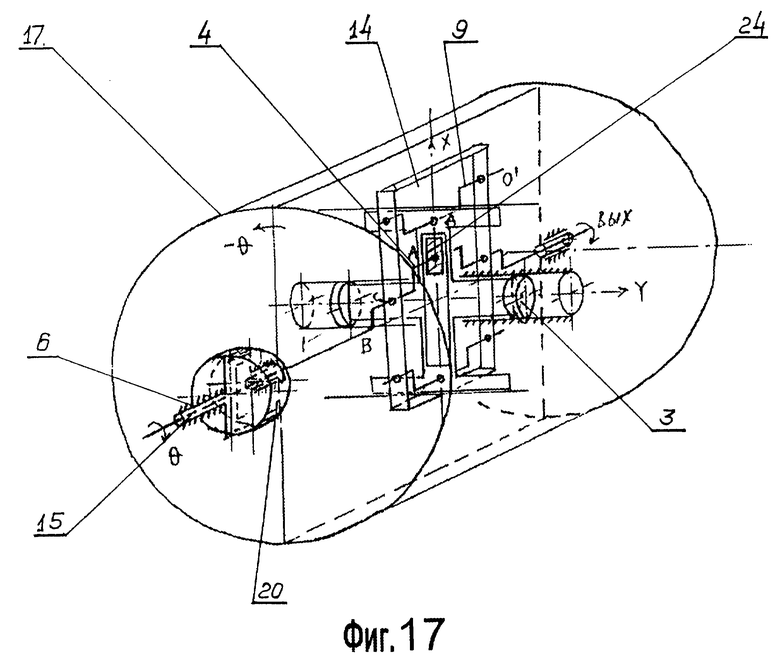
На фиг. 17 - вариант выполнения кулисного механизма в виде объемной машины с опорной рамой и одним инвертором направления вращения.
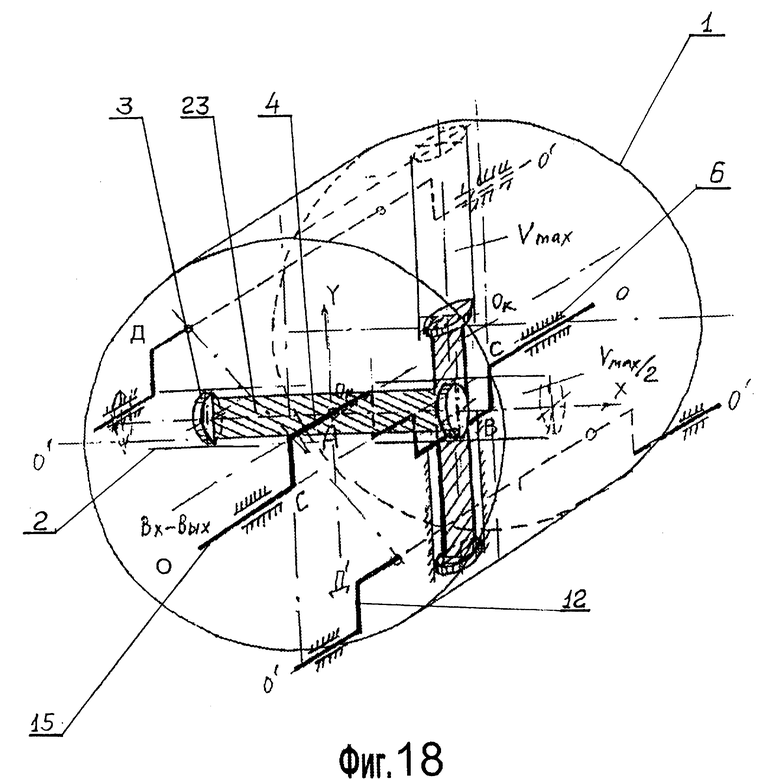
На фиг. 18 - вариант выполнения кулисного механизма в виде объемной машины с оппозитными поршнями и круговым поступательным движением кулисного элемента.
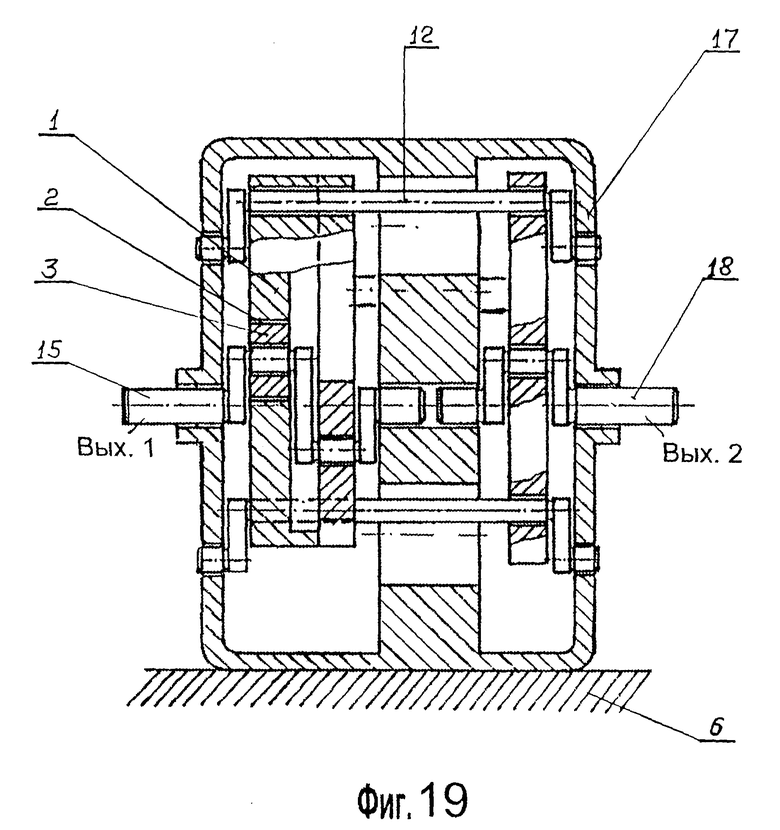
На фиг. 19 - вариант кулисного механизма, выполняющего функции инвертора направления вращения.
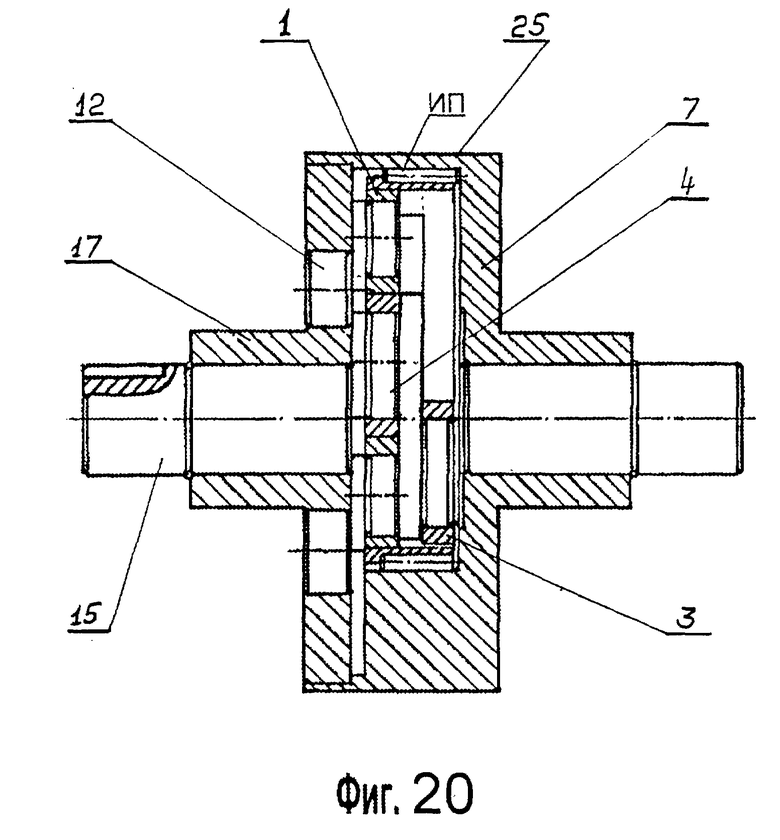
На фиг. 20 - вариант дифференциального кулисного механизма, выполняющего функции "расширителя" направления вращения.
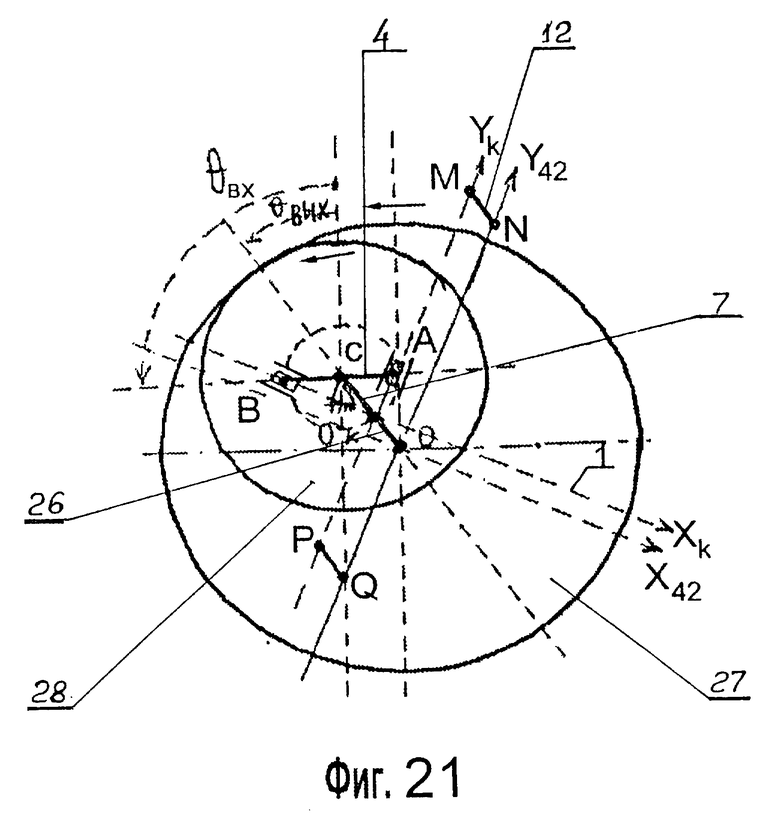
На фиг. 21 - кинематическая схема замкнутой кулисно-зубчатой планетарной передачи.
Изображенная на фиг. 1 схема поясняет способ преобразования движения в кулисном механизме. На ней показаны основные звенья кулисного механизма в двумя независимыми степенями свободы вращательного движения: кулисный элемент 1, включающий не менее двух непараллельных направляющих 2 и скользящими в них по направлениям осей X-X и Y-Y ползунами 3, и соединительный элемент 4 в виде кривошипа, шарнирно соединенного своими кривошипными шейками A и B с осями 5 ползунов 3. Оси собственного вращения кулисного элемента 1, соединительного элемента 4 и ползуна 3 проходят через их центры, обозначенные соответственно точками Oк, Oс и Oп. Центр масс кулисного механизма обозначен точкой "m". Угол между плечами соединительного элемента OсA и OсB равен θ = 2ψ, а расстояния OсA = OсB = OсOк, т.е. кулисный механизм является предельным.
В механизме имеется неподвижная основная ост вращения Oд-Oд, которая в общем случае расположена в пространстве произвольно, а в частных случаях может быть совмещена с осями собственного вращения основных звеньев кулисного механизма или с его центром масс.
Сущность способа изобретения движения в кулисном механизме по изобретению заключается в том, что осуществляют бипланетарное и биротативное движение элементов 1 и 4 кулисного механизма, для чего приводят в движение вокруг основной оси Oд-Oд хотя бы одну из осей кулисного или соединительного элементов (Oс-Oс или Oк-Oк), а другую ось приводят а круговое движение вокруг первой оси и в процессе движений одновременно осуществляют биротативное вращение обоих указанных элементов вокруг их собственных осей. При бипланетарном движении элементы кулисного механизма образуют два последовательно соединенных между собой планетарных механизма, один из которых вращается относительно другого.
Согласно способу ползунам или направляющим кулисного элемента и соединительному элементу сообщают вращение с угловыми скоростями, определяемыми дифференциальной зависимостью W0 + W2 - 2W1 = 0, где W1, W2 - угловые скорости вращения ползуна или направляющих кулисного элемента и соединительного элемента относительно собственных осей, W0 - угловая скорость вращения собственных осей Oк-Ок кулисного и соединительного Oс-Oс элементов друг относительно друга.
Для получения двух независимых степеней свободы осуществляют вращение двух звеньев кулисного механизма из числа основных и одного, введенного дополнительно, с угловыми скоростями, определяемыми зависимостью K1W1 + K2W2 + K3W3 = 0, где K1, K2, K3 - коэффициенты передачи, W1, W2, W3 - угловые скорости вращения соответствующих звеньев кулисного механизма.
Такой способ преобразования движения в кулисном механизме расширяет его кинематические возможности и уменьшает угловую протяженность цикла изменения координаты поступательного движения ползунов от минимального до максимального значений, что позволяет повысить производительность объемных машин, построенных на базе предлагаемого кулисного механизма.
На фиг. 2 схематично изображен реализующий изложенный способ кулисный механизм, содержащий основные звенья: кулисный элемент 1, включающий не менее двух непараллельных направляющих 2 и скользящими в них ползунами 3, кривошипный соединительный элемент 4, кривошипные шейки которого шарнирно соединены с осями 5 ползунов, корпус 6 и водило 7. Механизм снабжен центральным валом 8 и синхронизатором 9, звенья кулисного механизма кинематически связаны с синхронизатором 9 и корпусом 6 и одно из них установлено с возможностью бипланетарного, а другое - планетарного движения и каждое из них установлено с возможностью биротационного вращения относительно собственных осей.
В этом и нижеследующих вариантах выполнения кулисного механизма ось основного вала 8 является дополнительной осью Oд-Oд, упомянутой в изложенном способе. В данном случае эта ось совмещена с центром масс m кулисного механизма, расположенного на середине отрезка Oк- Oс (фиг. 1). Соединительный элемент 4, выполненный в виде двойного эксцентрика, шарнирно установлен на водиле 7, которое установлено с возможностью вращения в корпусе 6. В общем случае синхронизатор может быть выполнен в виде механизма, обеспечивающего относительное круговое поступательное движение звеньям, соединяемым посредством этого механизма. Синхронизатор может быть снабжен механизмами передачи вращения от одного из звеньев кулисного механизма на валы, соосные с осями вращения других звеньев кулисного механизма. В данном случае синхронизатор 9, обеспечивающий согласование угловых скоростей вращения кулисы 1 относительно оси Oк-Oк и соединительного элемента 4 относительно оси Oс-Ос, включает пару зубчатых колес внутреннего зацепления, одно 10 из которых соединено с кулисным элементом 1, а второе 11 - с корпусом.
Работа кулисного механизма, показанного на фиг. 2, происходит следующим образом. При вращении основного вала 8 совместно с водилом 7 соединительный элемент 4 совершает планетарное движение. При этом ползуны 3 скользят в направляющих 2 кулисного элемента 1, совершая в процессе вращения соединительного элемента 4 возвратно-поступательное движение относительно кулисного элемента 1, который в свою очередь посредством связанного с ним зубчатого колеса 10 синхронизатора 9 обкатывается по неподвижному зубчатому колесу 11 и совершает бипланетарное и биротативное движение относительно соединительного элемента и основного вала. Подобный кулисный механизм может быть использован как объемная машина в случае выполнения ползунов и направляющих в виде поршней и цилиндров объемной машины или как кулисно-зубчатый редуктор при съеме вращения с кулисного или соединительного элемента.
Такое выполнение кулисного механизма в виде объемной машины позволяет получить новый положительный эффект, заключающийся в том, что повышается производительность (мощность) машины за счет сокращения угловой протяженности цикла изменения объема рабочего тела от минимального до максимального (сжатие-расширение рабочего тела). Расширяются кинематические возможности кулисного механизма, поскольку в случае выполнения его в виде дифференциала или редуктора может быть реализован более широкий диапазон передаточных отношений и повышена нагрузочная способность механизма за счет параллельного использования кулисного и зубчатого зацеплений.
На фиг. 3 и фиг. 4 показаны варианты, в которых основная часть ось Oд-Oд совмещена с осью Oк-Oк кулисного элемента.
На фиг. 3 кулисный элемент 1 совершает вращательное движение, а соединительный элемент 4 - планетарное движение, при этом угловая скорость вращения W1 кулисного элемента 1 и угловая скорость вращения W0 центра "C" соединительного элемента 4 относительно центра Oк могут быть различными или одинаковыми как по величине, так и по направлению вращения. Например, при W0 = -W1 угловая скорость вращения соединительного элемента W2 = 3W2. Соосно расположенные звенья 1 и 7 могут быть использованы для связи с подсоединяемыми внешними устройствами.
При таком способе преобразования вращения цикл изменения координаты поступательного движения ползуна 3 от своего минимального значения до максимального (или изменение объема сжимаемого рабочего тела от минимального значения до максимального в объемных машинах) составляет 90o по углу поворота кулисы 1 относительно собственной оси. В прототипе, при неподвижной кулисе, такой цикл протекает за 180o угла поворота центра соединительного элемента.
В схемах, приведенных на фиг. 3, фиг. 7, фиг. 9 и фиг. 13, угловая протяженность рабочих циклов по углам поворота ведущего звена, соответственно водила 7, кулисного элемента 1, соединительного элемента 4 и ползуна 3 сокращается до 90o, что позволяет провести 4-тактный цикл, например, двигателя внутреннего сгорания за один оборот ведущего вала, в то время как в известных объемных машинах с кривошипно-шатунным или кулисным механизмом такой полный цикл проводится за два оборота ведущего вала.
Частным случаем планетарно-биротативного движения является круговое поступательное движение одного из звеньев кулисного механизма. Это случаи, представленные на фиг. 4, фиг. 6, фиг. 8, фиг. 11, где круговое поступательное движение совершают соответственно соединительный элемент 4, ползун 3, водило 7, кулисный элемент 1. Во всех случаях круговое поступательное движение звена обеспечивается синхронизатором 9, выполненным, например, в виде механизма параллельных кривошипов или подобного ему механизма, именуемого в дальнейшем - механизмом W 12. В частных случаях синхронизатор 9, выполненный в виде механизма W, связывает одно из звеньев кулисного механизма с корпусом 17 синхронизатора или корпусом 6 механизма (фиг. 4, 8, 11).
В варианте, показанном на фиг. 4, угловая скорость вращения водила 7 в два раза выше угловой скорости вращения кулисного элемента 1 относительно оси Oк-Oк. Возможны следующие режимы работы: режимы объемной машины, редуктора и обгонной муфты (при ведущем кулисном элементе 1 и ведомом водиле 7).
В кулисном механизме в ряде вариантов используется опорная рама, в которую устанавливается с возможностью вращения одно из звеньев кулисного механизма, и синхронизатор, выполняемый в виде механизма W, связывающего раму с другим звеном кулисного механизма и обеспечивающего их относительное круговое поступательное движение.
В частных случаях функции синхронизатора выполняет опорная рама 14, установленная с возможностью вращения на одном из звеньев кулисного механизма и посредством механизма W 12 связанная с другим подвижным звеном или с корпусом. Опорная рама 14 используется в схемах, показанных на фиг. 5, 6, 7, 16, 17, 19.
На фиг. 5 представлен вариант выполнения кулисного механизма в виде "расщепителя" направления вращения, содержащего неподвижной кулисный элемент 1, соединительный элемент 4, выполненный в виде коленчатого вала, срединные шейки 13 которого установлены шарнирно в опорной раме 14, которая связана с неподвижным кулисным элементом 1 посредством механизма W 12 (механизма параллельных кривошипов), обеспечивающего круговое поступательное движения рамы 14 относительно оси Oк-Oк. Соединительный элемент 4 своими концами посредством синхронизаторов-механизмов W связан с двумя соосными, расположенными с противоположных концов соединительного элемента 4, выходными валами 15. Коаксиально им расположены дополнительные валы 16, соединенные с шипами центральных кривошипов 12, соосных с осью Oк-Oк.
Кулисный механизм обеспечивает преобразование возвратно-поступательного движения ползунов 3 во вращательное движение выходных валов 15 (и обратно). При прямом преобразовании возвратно-поступательное движение ползунов 3 приводит в планетарное движение вокруг своих срединных шеек 13 соединительной элемент 4, который своими срединными шейками связан с опорной рамой 14, совершающей круговое поступательное движение, которое посредством механизмов W вызывает вращение выходных валов 15. Аналогично осуществляется обратное преобразование. При вращении любого из валов 15 опорная рама 14, совершая круговое поступательное движение, приводит соединительный элемент 4 в планетарное движение, вызывающее возвратно-поступательное движение ползунов 3. К достоинствам такого выполнения механизма относится двухопорное крепление всех звеньев силового преобразователя (соединительный элемент 4 может иметь и большее число опор), отсутствие консольных элементов, выполнение всех подвижных звеньев цельными.
Кулисный механизм, выполненный по этой же схеме в виде объемной машины, может работать в режиме двигателя внутреннего сгорания. При выполнении кинематических пар ползун-кулиса в виде поршень-цилиндр энергия рабочей топливной смеси в рабочих камерах, образованными поршнями и цилиндрами, заставляет поршни 3 линейно перемещаться вдоль осей X-X, Y-Y направляющих 2 кулисного элемента 1. Возникающее при этом планетарное движение соединительного элемента приводит в конечном счете к вращению выходного вала 15. В рассмотренном варианте реализован способ преобразования движения, когда кулисный элемент 1 неподвижен, однако в общем случае он может вращаться относительно оси Oк.
Кулисный механизм, изображенный на фиг. 5, может работать как преобразователь возвратно-поступательного движения ползунов 3 в контрроторное вращение звеньев, расположенных коаксиально с двух сторон преобразователя (и обратно). При контрроторном преобразовании возвратно-поступательного движения ползунов 3, осуществляемом, например, в объемных машинах за счет энергии рабочей среды в замкнутых объемах рабочих камер, ползуны 3 возвратно-поступательно перемещаются в направляющих 2 корпуса 1, ось Oс-Oс соединительного элемента движется по окружности относительно оси Oк-Oк кулисного элемента. Соединительный элемент 4 совершает планетарное движение и приводит опорную раму 14 в круговое поступательное движение. При этом вращения кривошипов 12 и вала 15, являющегося выходным, происходят с одинаковыми угловыми скоростями, но в противоположных направлениях. Таким образом осуществляется контрроторное вращение коаксиально расположенных вала 15 и вала 16, соединенного с шипом среднего из кривошипов 12, выведенных по обе стороны устройства.
Возможно также взаимное преобразование вращательного движения валов 15 и 16, когда один из них будет ведущим, а другой ведомым, с полученным передаточного отношения между ними, равного - 1.
Введение механизма W и валов 15, являющихся выходными, придает устройству новые функциональные возможности, заключающиеся в возможности работы устройства в качестве бесшестеренного синхронизатора в контрроторных механизмах, инвертора направления вращения, "расщепителя" вращения, редуктора или дифференциала. Потери на трение в таком устройстве меньше, чем в известных кривошипно-шатунных или кулисных механизмах, что является его преимуществом.
На фиг. 6, фиг. 7 и фиг. 8 показаны варианты, в которых основная ось Oд-Oд совмещена с осью 5 одного из ползунов 3.
В варианте выполнения кулисного механизма, показанном на фиг. 6, основная ось Oд-Oд совмещена с осью 5 неподвижного ползуна 3, закрепленного на корпусе 6. Соединительный элемент 4 вращается относительно оси 5. С центром Oс - срединной шейкой соединительного элемента 4 шарнирно соединена опорная рама 14, которая посредством механизма W 12 связана с кулисным элементом 1. Последний в данном случае установлен с возможностью возвратно-поступательного движения относительно закрепленного ползуна 3.
Кулисный механизм работает следующим образом. При перемещении другого, разгруженного ползуна 3 в направляющей 2 по оси X-X опорная рама 14, совершая круговое поступательное движение относительно оси Oд-Oд, приводит кулисный элемент 1 посредством кривошипного механизма W 12 в возвратно-поступательное перемещение вдоль оси Y-Y относительно неподвижного ползуна 3, а соединительный элемент 4 приводит во вращательное движение относительно оси Oд-Oд.
При обратной передаче движения вращение соединительного элемента 4 относительно оси Oд-Oд преобразуется в возвратно-поступательное движение разгруженного ползуна 3 вдоль оси X-X. Соединительный элемент 4 и кривошипы механизма W 12 при этом вращаются в противоположных направлениях.
В варианте выполнения кулисного механизма, показанном на фиг. 7, опорная рама 14 также связана посредством механизма W 12 с кулисным элементом 1. Ползун 3, через ось 5 которого проходит ось Oд-Oд, установлен с возможностью вращения в корпусе 6. Этот ползун и соединительный элемент 4 вращаются относительно оси 5 в противоположных направлениях, а водило 7 и разгруженный второй ползун 3 совершают планетарное движение. При этом угловая скорость вращения водила 7 относительно оси Oс-Oс в три раза выше угловой скорости вращения ползуна 3 относительно оси Oд-Oд.
В варианте выполнения кулисного механизма, показанном на фиг. 8, водило 7 посредством механизма W 12 связано с корпусом 6. Здесь водило 7 совершает круговое поступательное движение относительно оси, совпадающей с осью 5 ползуна 3 и неподвижной осью Oд-Oд. Угловая скорость вращения соединительного элемента 4 в этом случае в два раза выше угловой скорости вращения ползуна 3 вокруг оси 5.
На фиг. 9, фиг. 10 и фиг. 11 представлены варианты выполнения кулисного механизма, в которых основная ось Oд-Oд совмещена с неподвижной осью Oс-Oс соединительного элемента 4. Соединительный 4 и кулисный 1 элементы и водило 7 установлены с возможностью вращения относительно собственных осей. В вариантах фиг. 9 и фиг. 10 кулисный элемент 1 движется планетарно, в варианте фиг. 11 он посредством механизма W 12 связан с корпусом 6 и совершает круговое поступательное движение относительно оси Oд-Oд.
Варианты фиг. 9 и фиг. 10 отличаются только реализуемыми в них соотношениями угловых скоростей кулисного 1 и соединительного 4 элементов. Так, в первом случае W0 = -3W2, а во втором W2 = -3W0. Циклы изменения рабочих объемов в кулисных механизмах, выполненных по фиг. 9 и фиг. 10 в виде объемных машин, одинаковые, равные 90o, но с учетом отсчета углов поворота: на фиг. 10 - водила 7, а на фиг. 9 - соединительного элемента 4.
Кулисный механизм в варианте, показанном на фиг. 11, работает следующим образом. При возвратно-поступательном движении ползунов 3 в направляющих 2 кулисного элемента 1 соединительный элемент 4 и водило 7 вращаются в противоположных направлениях с одинаковой скоростью, а заторможенный от вращения кулисный элемент 1, связанный посредством механизма W с корпусом 6, совершает круговое поступательное движение относительно оси Oд-Oд. При обратном преобразовании движения вращения водила 7 приводит к возвратно-поступательному движению ползунов 3.
На фиг. 12, фиг. 13 и фиг. 14 показаны варианты, соответствующие различным дифференциальным схемам кулисного механизма. Основными звеньями дифференциального кулисного механизма (с двумя независимыми степенями свободы вращательного движения) являются: кулисный элемент 1, соединительный элемент 4 и водило 7, - одно из которых связывают с корпусом 17, который устанавливают шарнирно в корпусе 6 с возможностью вращения относительно основной оси Oд-Oд. Одно из звеньев кулисного механизма, в том числе кулисный элемент, ползун соединительный элемент, водило или корпус, может быть установлено либо с возможностью вращения, либо заторможено.
В дифференциальных схемах водило выполнено в виде кривошипного вала, связывающего между собой два звена кулисного механизма и обеспечивающего планетарное движение одного из этих звеньев относительно другого.
В частности, водило размещают в корпусе соосно с ним, а установленное на водиле с возможностью вращения звено - кулисный или соединительный элемент, связывают посредством синхронизатора с корпусом.
В варианте выполнения кулисного механизма, показанном на фиг. 12, основная ось Oд-Oд совмещена с осью Oк- Oк кулисного элемента 1, который жестко соединен с соосным с ним корпусом 17. Соединительный элемент 4, установленный на водиле 7, посредством механизма W 12 связан с валом 15, соосным с осью Oд-Oд.
В варианте выполнения кулисного механизма, показанном на фиг. 13, основная ось совмещена с осью 5 ползуна 3, жестко соединенного с корпусом 17. Водило 7 посредством механизма W 12 связано с валом 15, который так же, как соединительный элемент 4, установлен с возможностью вращения относительно оси Oд-Oд. В варианте выполнения кулисного механизма, показанном на фиг. 14, основная ось Oд-Oд совмещена с осью Oс-Oс соединительного элемента 4. Кулисный элемент 1 связан посредством механизма W 12 с корпусом 17, который так же, как соединительный элемент 4 и водило 7, установлен с возможностью вращения в корпусе 6 относительно основной оси. Внешними звеньями во всех вариантах дифференциалов являются: водило 7, соединительный элемент 4 и корпус 17.
В состав синхронизатора может входить механизм передачи вращения с заданным передаточным отношением между соосно вращающимися звеньями кулисного механизма, например инвертор направления вращения, т.е. механизм с передаточным отношением i = -1, примеры приведены ниже.
На фиг. 15 представлен вариант выполнения кулисного механизма в виде объемной роторной поршневой машины, в которой ползуны 3 выполнены в виде поршней, а направляющие 2 в виде цилиндров. Ползуны 3 в виде поршней имеют общие штоки, шарнирно установленные на выполненном в виде коленчатого вала соединительном элементе 4, оси цилиндров Y-Y и X-X расположены под углом, например, 90o в кулисном элементе 1, водило 7 выполнено в виде двух, установленных с возможностью вращения в корпусе 6 кривошипных валов 18 и 19, которые шарнирно соединены с противоположными по оси вращения концевыми срединными шейками соединительного элемента 4, а синхронизатор 9 выполнен в виде двух инверторов направления вращения 20 и 21, посредством которых кривошипные валы 18 и 19 связаны с кулисным элементом 4. Кулисный элемент 1 установлен шарнирно в корпусе 6 с возможностью вращения относительно оси Oд-Oд, совмещенной с осью Oк-Oк кулисного элемента. Коренные шейки каждого из кривошипных валов 18 и 19 связаны с входами инвертора и с валом 15, являющимся выходным. Выходы инверторов 20 и 21 с двух сторон связаны с кулисным элементом 1. В качестве инвертора может быть использован возвратный ряд, составленный из конических колес (Кожевников С.Н. и др. Механизмы. М., Машиностроение, 1976, с. 90, фиг. 2.117, стр. 172).
Работа объемной машины происходит следующим образом. При движении ползунов 3 в виде поршней в направляющих 2, выполненных в виде цилиндров, под действием горючих газов, образованных в замкнутых камерах, возникают силы, стремящиеся повернуть кривошипные валы 18 и 19 вокруг оси Oк-Oк. Т.к. эти кривошипы соединены через инверторы с кулисным элементом 1, то последний приводится во вращение в направлении, противоположном направлению вращения кривошипных валов 18, 19. Кинематические соотношения и цикл предельных изменений объема рабочего тела в цилиндрах соответствует варианту, показанному на фиг. 3 (цикл составляет 90o).
На фиг. 16 представлен вариант выполнения кулисного механизма применительно к оппозитной бесшатунной объемной машине, содержащей неподвижный корпус 17, выполняющий функцию корпуса 6, опорную раму 14, шарнирно связанную с срединными шейками соединительного элемента 4. В корпусе 17 выполнена направляющая 2 в виде цилиндрической расточки и соосная с ней дополнительная направляющая 22, кулисный элемент выполнен в виде штока 23 с парой оппозитных ползунов 3 в виде поршней, скользящих в цилиндрической расточке корпуса 17, и дополнительной направляющей 22 и скользящего в направляющих штока разгруженного ползуна 24, шарнирно связанного с коленной шейкой "A" соединительного элемента 4. Синхронизатор 9 выполнен в виде механизма параллельных кривошипов, связывающего опорную раму 14 со штоком 23. Вторая коленная шейка "B" соединительного элемента 4 соединена с основным валом 15, установленном с возможностью вращения в корпусе 6.
Работа объемной машины в качестве двигателя внутреннего сгорания (или компрессора), использующей кулисный механизм, происходит следующим образом. Под действием энергии топливной рабочей смеси в камерах поршень-цилиндр оппозитные ползуны 3 в виде поршней и разгруженный ползун 24 перемещаются в направляющих и приводят во вращение соединительный элемент 4 и кривошипы синхронизатора 9, причем в противоположные стороны. Опорная рама 14 при этом совершает круговое поступательное движение, а вращение соединительного элемента 4 передается основному валу 15.
На фиг. 17 представлен кулисный механизм применительно к объемной машине, который имеет те же основные звенья и выполнен так же, как механизм, показанный на фиг. 16. Отличие его заключается в том, что синхронизатор 9 выполнен в виде одного инвертора направления вращения 20, связывающего соединительный элемент 4 с корпусом 17 синхронизатора, который установлен в корпусе 6 с возможностью вращения относительно основной оси Oд-Oд и с которым соединен основной вал 15.
Работа объемной машины, выполненной с кулисным механизмом, происходит следующим образом.
При движении ползунов 3 в виде поршней и штока под действием горючих газов, образованных в рабочих камерах машины, возникают силы, которые вызывают вращение соединительного элемента 4. От него вращение передается на вал 15 и через инвертор 20 - на корпус 17.
Такое выполнение кулисного механизма способствует его полному статическому и динамическому уравновешиванию и уменьшению потерь на трение скольжения в паре разгруженный ползун 24 - шток 23 и в цилиндро-поршневой группе, а также сокращает угловой цикл предельного изменения объема рабочего тела на 90o.
На фиг. 18 представлен вариант выполнения кулисного механизма в виде бесшатунной роторной поршневой объемной машины по схеме, показанной на фиг. 11. Механизм содержит ползуны 3, выполненные в виде цилиндрических поршней с общими штоками 23, шарнирно установленными на соединительном элементе 4, который выполнен в виде коленчатого вала; кулисный элемент 1, связанный с корпусом 6 посредством механизмом W 12, выполненного в виде механизма параллельных кривошипов. Основным валом 15, выведенным по обе стороны механизма, служат концевые срединные шейки соединительного элемента 4.
Подобная роторно-поршневая объемная машина работает следующим образом (в режиме двигателя). Под действием энергии рабочей топливной смеси в рабочих камерах поршни-цилиндры ползуны 3 со штоками 23 перемещаются в направляющих 2 и приводят во вращение соединительный элемент 4 и связанный с ним вал 15. При этом кулисный элемент 1, благодаря механизму W, совершает круговое поступательное движение.
На фиг. 19 представлен вариант выполнения кулисного механизма, содержащего все основные элементы схемы фиг. 11, а также дополнительно корпус 17 и кривошипный вал 18, выполняющий функции дополнительного центрального кривошипа механизма W 12 (механизма параллельных кривошипов), связывающего кулисный элемент 1 с корпусом 17, закрепленном на корпусе 6. Кривошипный вал 18 является дополнительным выходным валом, расположенным противоположно основному валу 15 и соосно с ним.
Кулисный механизм работает аналогично преобразователю по фиг. 11, но имеет дополнительный выходной вал 18, вращающийся с такой же скоростью, как и основной вал 15, но в противоположном направлении. В этом случае кулисный механизм является инвертором направления вращения. Этот же механизм может работать в качестве дифференциала, если корпус 17 установить в корпусе 6 с возможностью вращения. В этом случае при ведущем корпусе 17 валы 15 и 18 будут вращаться с одинаковыми скоростями в одном направлении.
На фиг. 20 представлен вариант выполнения кулисного механизма по фиг. 11, в котором кулисный элемент 1 установлен в водиле 7 на игольчатом подшипнике 25 и посредством механизма W 12 связан с корпусом 17. Соединительный элемент 4 выполнен в виде коленчатого вала с двумя концевыми участками 15, на которых установлены с возможностью вращения корпус 17 и водило 7. Механизм представляет собой дифференциал с тремя внешними звеньями: вал 15, корпус 17 и водило 7.
В предлагаемых кулисных механизмах два вращающихся звена или два соединенных с ними соосно вращающихся вала могут быть соединены с двумя соосно вращающимися элементами другого внешнего устройства или механизма, при этом передача вращающихся моментов может осуществляться как от кулисного механизма к внешним устройствам, так и в обратном направлении.
Например, два вращающиеся в противоположных направлениях звена кулисного механизма, осуществляющихся контрроторное вращение, могут быть соединены с двумя вращающимися элементами электродвигателя, например со статорами и роторами электродвигателя. При этом ведущими могут быть как кулисный механизм, так и электрическая машина, работающая на своих обычных режимах.
Возможно использование кулисного механизма в качестве инвертора направления вращения в его связи с контрроторным механизмом, выполненным с трохоидным зацеплением, например механизмом, содержащем корпус с внутренней поверхностью, имеющей трохоидный профиль в поперечном сечении, взаимодействующий с ним ротор, установленный на водиле, выполненном в виде кривошипа. Валы кулисного механизма соединены соответственно с водилом и корпусом механизма с трохоидным зацеплением. Число циклов предельных изменения объема рабочего тела за один оборот эксцентрикового вала в данном случае будет в два раза больше, чем в известной объемной трохоидной машине с таким же профилем ротора.
Возможен вариант использования кулисного механизма в составе системы соосных контрроторных машин и механизмов. Например, звенья кулисного механизма могут быть соединены: одно - с внутренней подвижной системой вращения, в которую включены внутренние роторы электрического, лопастного, винтового или трохоидного контрроторных механизмов, а другое - с внешней подвижной системой вращения, в которую включены соответствующие наружные роторы этих же контрроторных механизмов. В данном случае контрроторное вращение звеньев кулисного механизма синхронизирует вращение звеньев указанных последовательно соединенных контрроторных механизмов.
Возможна комбинация последовательно соединенных контрроторных машин: винтового воздушного вентилятора, центростремительного лопастного компрессора, трохоидной объемной машины и центробежной лопастной турбины, установленных в общей системе вращения и синхронизируемых кулисным механизмом. Такая комбинация машин обеспечивает режим компаундного двигателя внутреннего сгорания, в котором первая секция компаунда работает в режиме контрроторного компрессорного наддува, вторая секция связки - в режиме двигателя внутреннего сгорания, а третья секция - в режиме контрроторной лопастной турбины.
В частных случаях синхронизатор включает один или более механизмов передачи вращения от одного из подвижных звеньев кулисного механизма на вал, соосный с другим звеном кулисного механизма. Такими механизмами передачи могут быть: шарнир равных углов скоростей, механизм W или другие подобные им механизмы, частично представленные ниже.
Предлагаемый кулисный механизм, являясь планетарным механизмом, может образовывать с другими планетарными механизмами замкнутые планетарные передачи. Три любых вращающихся звена кулисного механизма, например кулисный элемент 1, соединительный элемент 4, водило 7 или ползун 3 (фиг. 12 - фиг. 14) могут быть соединены в произвольных сочетаниях с соответствующими звеньями любого планетарного механизма, в том числе простого планетарного или дифференциального, образуя кулисно-зубчатые планетарные механизмы, обладающие новыми положительными свойствами.
На фиг. 21 представлен пример замкнутой кулисно-зубчатой планетарной передачи, относящейся (по классификации В.Н. Кудрявцева) к передачам cI. В состав передачи входит кулисный механизм по схеме фиг. 14 (центральная ось совмещена с осью Oс-Oс соединительного элемента 4), звенья которого: кулисный элемент 1, соединительный элемент 4, водило 7 и механизм W 12 связаны со звеньями зубчатой планетарной передачи K-H-V, содержащей водило 26, являющееся продолжением водила 7, установленное на нем зубчатое колесо-сателлит 27, находящееся в постоянном зацеплении с центральным колесом 28. Колесо 28 жестко соединено с соединительным элементом 4. Сателлит 27 посредством механизма W 12 (обозначен MN-PQ) связан с кулисным элементом 1, а центральное колесо 28 соединено с соосным с ним соединительным элементом 4.
Замкнутая передача работает следующим образом. Вращение, подводимое к ведущему соединительному элементу 4, передается непосредственно центральному колесу 28 и через кулисный элемент 1 и механизм W 12 сателлиту 27. Оба эти вращения, в соответствии с внутренним передаточным отношением зубчатой планетарной передачи, суммируются на ведомом водиле 26.
При вращении соединительного элемента 4 в случае Z45/Z46 = 2 водило 26 остается неподвижным, соединительный элемент 4 и кулисный элемент 1 совершают биротативное вращение вокруг неподвижных осей водила, ползуны 3 совершают планетарное движение, а колеса 27, 28 совершают биротативное вращение вокруг неподвижных осей. При Z45/Z46 ≠ 2 водило 26 начинает вращаться вокруг основной оси C (срединная шейка соединительного элемента 4) с редукцией по отношению к вращению элемента 4.
Преимущества предлагаемого способа преобразования движения в кулисном механизме и кулисного механизма заключается в том, что в нем реализуется в том числе бесшестеренное, многофункциональное устройство соосное, способствующее полному уравновешиванию звеньев, позволяющее передавать большие вращающие моменты при малых габаритах и способное работать как однонаправленный или контрроторный механизм для преобразования возвратно-поступательного движения во вращательное и обратно; синхронизатор вращения в контрроторных машинах; инвертор направления вращения; "расщепитель" однонаправленного вращательного движения; дифференциал, редуктор или мультипликатор; объемная поршневая бесшатунная машина; контрроторная электрическая, лопастная или трохоидная машина. Расширенные кинематические возможности кулисного механизма позволяют использовать его для решения различных практических задач.
Изобретение соответствует условию охраноспособности "промышленная применимость", поскольку осуществимо с использованием известных средств производства и существующих технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2134795C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2140018C1 |
| РОТОРНАЯ ВИНТОВАЯ МАШИНА ОБЪЕМНОГО ТИПА И СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В ОБЪЕМНОЙ ВИНТОВОЙ МАШИНЕ | 2003 |
|
RU2336436C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВО ВРАЩАТЕЛЬНОЙ ВИНТОВОЙ МАШИНЕ ОБЪЕМНОГО ТИПА | 2004 |
|
RU2331770C2 |
| ВРАЩАЮЩАЯСЯ ШНЕКОВАЯ МАШИНА И СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В НЕЙ | 2003 |
|
RU2336437C2 |
| Кулисный механизм | 1989 |
|
SU1650991A1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| Кулисный механизм | 1986 |
|
SU1370348A1 |
| Зубчато-кулисный планетарный механизм с кардановой кулисой | 1980 |
|
SU1051350A1 |
Способ преобразования и кулисный механизм могут быть использованы в различных машинах и механизмах, преимущественно в бесшатунных поршневых двигателях. Способ преобразования движения в кулисном механизме, содержащем ползуны, кулисный элемент, установленный на оси и выполненный в виде по меньшей мере двух непараллельных направляющих со скользящими в них упомянутыми ползунами, и соединительный элемент, установленный на оси и шарнирно связанный с ползунами, заключается в обеспечении вращения по крайней мере одного из упомянутых элементов вокруг своей оси, при этом осуществляют одновременное вращение оси одного из элементов относительно введенной основной оси и оси другого элемента относительно оси первого элемента, и вращение обоих элементов вокруг своих осей, и синхронизацию угловых скоростей планетарного и вращательного движений. Особенностью выполнения кулисного механизма является то, что он снабжен основным валом и синхронизатором, связанным с одной стороны с основным валом или корпусом, а с другой стороны - по крайней мере с ползуном, или кулисным элементом, или с соединительным элементом, или с двумя из них, и по крайней мере один из упомянутых элементов или ползунов установлен шарнирно в синхронизаторе с возможностью вращения вокруг основного вала и обеспечения при этом дополнительного планетарного вращения любого одного элемента относительно основного вала и планетарного вращения второго элемента относительно оси первого элемента. Изобретение обеспечивает высокую эффективность кинематического преобразования, увеличение КПД. 2 с. и 14 з.п.ф-лы, 21 ил.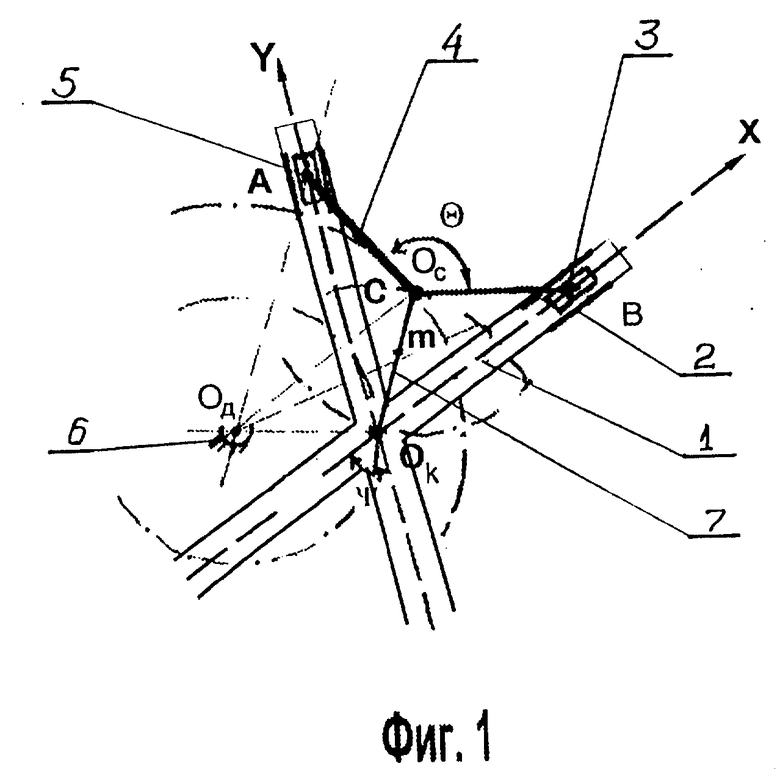
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Баландин С.С | |||
| Бесшатунные поршневые двигатели внутреннего сгорания | |||
| - М.: Машиностроение, 1968, с.5-27 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм преобразования возвратно-поступательного движения во вращательное и наоборот | 1982 |
|
SU1052763A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| МОТОР-КОЛЕСО | 1991 |
|
RU2038984C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| - М.: Машиностроение, 1976, с.90, фиг.2.117, с.172 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Поршневая машина | 1990 |
|
SU1788301A1 |
