Изобретение относится к авиационному приборостроению и может быть использовано в летательных аппаратах с винтами большого диаметра.
Рассмотрим работу воздушного винта, пользуясь аэромагнитной аналогией (1, c.89). Вращаясь, лопасти винта отбрасывают назад (вниз) воздух, создавая аэродинамические силы и его осевую скорость. За винтом струя воздуха закручивается в сторону его вращения (фиг.1 - аналогия с гребным винтом).
Дальнейшее описание в основном относится к несущему винту вертолета. Под винтом возникает область повышенного давления. Над винтом - область пониженного давления. В результате образуется сила-упор, направленная вверх. Эта сила, уравновешивая вес вертолета, поддерживает его на определенной высоте. В случае ее превышения над весом вертолет поднимается (набирает высоту). При ее снижении вертолет опускается. Более строгое описание требует учета выталкивающей силы, действующей на вертолет со стороны среды (воздуха).
Вес и выталкивающая сила направлены встречно. Уравнение равновесия, удержания вертолета на определенной высоте, имеет вид

где Py - упор, G - вес, В - выталкивающая сила.
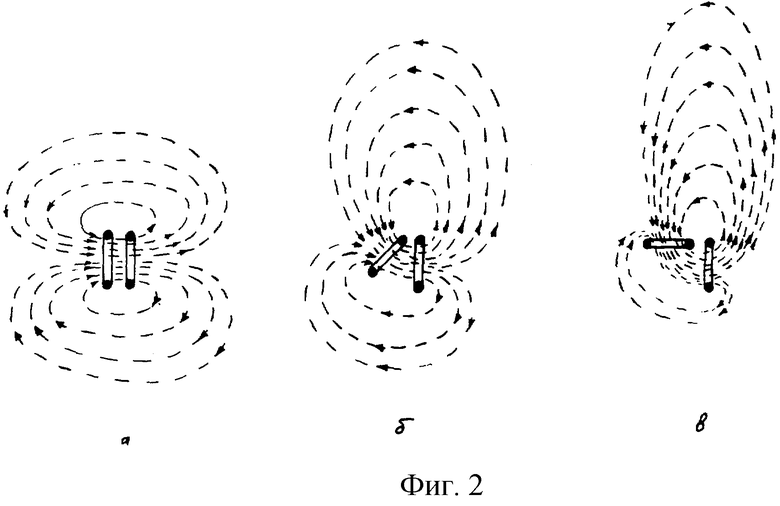
Представим аэродинамическое поле винта в виде пространственного диполя, комбинации источника и стока с равными расходами. Упрощенное силовое поле является набором "эллиптических" силовых линий, расположенных вокруг винта. Здесь полезна аналогия с электромагнитным полем соленоида, состоящего из двух половин: неподвижной (пространство под винтом) и подвижной (пространство над винтом). Источником является северный полюс, а стоком - южный (фиг.2).
Принципиальным отличием поля винта от поля соленоида является наличие у первого закрутки силовых линий (для упрощения закрутка на фиг.2 не показана). Также не показано влияние корпуса носителя.
В соответствии с (1, с.95) крутящий момент винта рассчитывается по формуле

где D - диаметр винта, n - скорость вращения винта, ρ - плотность воздуха, К1 - коэффициент момента.
Из формулы 2 следует наличие резкого различия величины крутящего момента у винтов большого и малого диаметра. Отношение их может достигать нескольких порядков.
Выражение для упора винта имеет вид: 
где К2 - коэффициент упора, Pу˜D4.
Таким образом, для винтов большого диаметра характерно наличие очень больших крутящего момента и упора. Например, увеличение диаметра в два раза приводит к увеличению момента в 32, а упора в 16 раз (при постоянных оборотах). В результате резко возрастает степень закрутки воздуха.
Фото гребного винта (фиг.1), заимствованное из (3), хорошо показывает закрутку воды за винтом, образование жгутов силовых линий (трубок тока), сходящих с концевых кромок лопастей, и их образование на засасывающей стороне. Силовая линия является замкнутой спиралью переменного шага и радиуса. Совокупность множества силовых линий образует силовое поле винта. Вдоль этих линий происходит движение масс воздуха (воды). Структура поля хорошо видна у гребного винта благодаря кавитационным пузырькам. Особенности этой структуры будут использованы и для описания поля воздушного винта. Отличия обуславливаются тем, что плотность воздуха на три порядка меньше плотности воды, ось вращения винта вертолета вертикальна и носитель расположен под винтом, в области повышенного давления.
Геометрическую модель поля около винта можно представить в виде двух усеченных конусов, имеющих одну вертикальную ось и одно малое основание, совпадающее с диском винта. В верхнем конусе - недостаток давления, в нижнем - избыток.
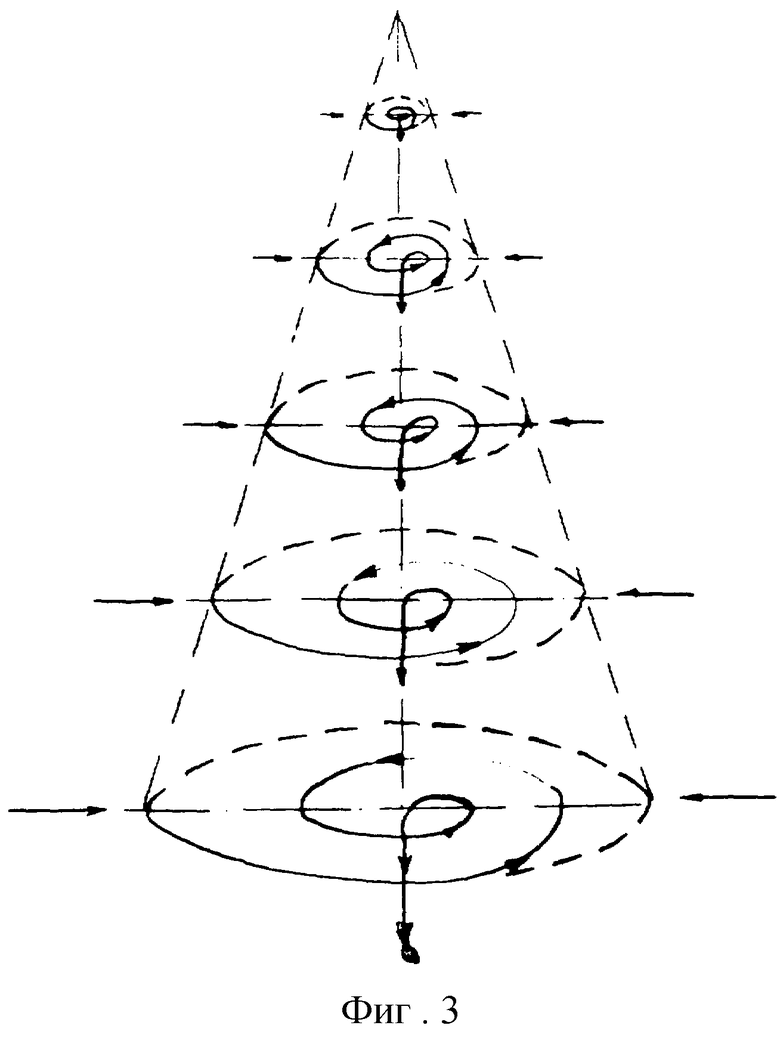
Источником закрутки являются нагнетающие поверхности лопастей винта, создающие вращающий момент. Несмотря на снижение закрутки корпусом носителя она передается в область над винтом благодаря вращению засасывающих поверхностей лопастей и наличию вязкости. Степень закрутки может быть различной. При некоторых условиях (о них будет сказано ниже) закрутка может достигать наибольшего значения. В результате над винтом возникает вихревое образование - (фиг.3), подобие смерча.
При горизонтальном движении встречный поток сносит назад вихревое образование и оно исчезает. Однако через некоторое (малое) время образование вновь возникает, имея вертикальную ось, и оно сносится встречным потоком. Таким образом, смерчь описывает в вертикальной плоскости подобие сектора-квадранта. Его существование носит циклический характер. При зарождении его ось вертикальна, при исчезновении горизонтальна. Период смерча можно определить по формулам

где tо - время образования, tи - время исчезновения, tд - время действия

где Н - высота образования, Uн - скорость набегающего потока.
Частота обратна периоду, т.е. 
Задаваясь значениями Н=100 м и Uн=30 м/с, получим значения Т=5 с и f=0,2 Гц.
Следовательно, вектор упора может иметь горизонтальную составлящую, изменяющуюся за период от нуля до максимума. При этом его вертикальная составляющая изменится от максимума до нуля. Уточняя, необходимо определить характер упора как пульсирующий, имеющий постоянную и переменную составляющие.
Рассмотрим подробнее факторы, влияющие на амплитуду и частоту изменения переменной составляющей упора. Главной причиной возникновения смерча над винтом является соотношение энергий поступательного и вращательного движения. Это определяется уравнением
где mп - масса воздуха поступательного движения, Uп - скорость поступательного движения, ω - угловая скорость вращательного движения, I - момент инерции вращающейся массы воздуха.
Момент инерции вращающегося цилиндра определяется формулой

где mв - вращающаяся масса, Rв - средний радиус вращения.
Обозначим энергию поступательного вращательного движения символами А и В соответственно. Уравнение 6 имеет вид: А=В и характеризует предвихревое состояние винта. Оно неустойчиво, смерча нет, но он при появлении способствующего фактора может возникнуть. Неравенству А>В соответствует устойчивое состояние отсутствия смерча. Неравенству А<В соответствует устойчивое состояние присутствия смерча.
Способствующим фактором, приводящим к возникновению смерча, является восходящий поток. Он способен изменить равенство А=В на неравенство А<В или на А≪В.
Дадим краткое описание источникам восходящих потоков. Пожары на местности, на технических сооружениях, на транспорте, действующие вулканы, участки местности, имеющие темную окраску, котлованы и прогреваемые солнцем ущелья, водная поверхность во второй половине дня - все это может создавать восходящие потоки воздуха. При этом их геометрия на высоте превосходит в десятки и более раз за счет присоединенной массы (турбулентное перемешивание, эжектирующее действие). С учетом этого кратковременный способствующий фактор превращается в долговременный, способный вызвать серию (временную последовательность) вихревых образований. Их визуализация практически отсутствует, при этом внимание экипажа сосредоточено на местность.
В результате переменная составляющая упора, ее амплитуда пропорционально (в определенных пределах) зависит от интенсивности восходящего потока. Последний направлен встречно.
Воздушный винт является генератором амплитудно-модулированных колебаний. Спектр этих колебаний линейчатый. Основная энергия сосредоточена в несущей частоте fн и в двух боковых частотах: fн+f и fн-f. При этом f - частота модулирующей функции (циркуляции смерча над винтом). Несущая частота определяется по формуле

где n - скорость вращения винта, N - количество лопастей.
Для рассматриваемого случая при n=240 об/мин (4 об/с) и N=3 несущая частота равна 12 Гц, верхняя боковая равна 12,2 Гц, нижняя боковая составляет 11,8 Гц. Представленный спектр является упрощенным, вытекающим из гармонического анализа. Реальная форма несущей более сложная. Однако в ней можно выделить первую гармонику.
Таким образом, упор (подъемная сила) является в первом приближении амплитудно-модулированной функцией. При этом коэффициент модуляции в крайних случаях может приближаться к единице (возникновение интенсивного смерча). Следствием этого может быть резкая потеря высоты (провал) с катастрофическими последствиями.
Рассмотрим траекторию движения вертолета, нагруженного водой, при тушении пожара. На тректории можно выделить три участка. Участок подлета - участок торможения и снижения высоты не является опасным. Последнее характеризуется неравенством А≫В и справедливо в случае учета экипажем геометрии присоединенных масс восходящего потока воздуха. В конце этого участка может иметь место неравенство А>B.
Участок пролета над очагом пожара является опасным и здесь в потоке воздуха над винтом могут иметь место соотношения: A≃B или А<В. При существовании равенства A≃B сброс воды в очаг пожара изменит его на неравенство А>В. Вихревое образование над винтом отсутствует.
При существовании неравенства А<В (к нему приводит работа винта в мощном восходящем потоке) над винтом возникает смерч, вершина которого под влиянием встречного потока (вертолет на малой скорости перемещается над очагом пожара) смещается назад. Вектор равнодействующей подъемной силы начинает вращаться вокруг горизонтальной оси, проходящей через центр тяжести вертолета. Последнее обуславливает появление вращающего момента, увеличение угла между диском винта и горизонталью, провал вертолета, увеличиващийся при сносе смерча с диска винта.
Здесь возможны следующие случаи. Сброс воды происходит в начале цикла существования смерча, когда вращающий момент только возникает. После сброса неравенство А<В изменится на А>В, смерч исчезает и вертолет резко набирает высоту. Сброс воды производится в середине цикла действия смерча. Имеет место бóльший провал вертолета. Однако при сбросе неравенство А<В изменится на А>В.
Сброс воды производится в конце цикла смерча. Имеет место наибольший провал (потеря высоты). Неравенство А<В после сброса не превращается в неравенство А>В и над вертолетом вновь возникает смерч.
Работа винта в вихревом образовании (в смерче) имеет следующие отличия. Упрощая, рассматриваем лопасть винта как крыло с постоянным углом атаки по длине. При этом лопасть расчленяем на две части: центральную и периферийную. В центральной части смерча имеет место разрежение, обуславливающее отсутствие подъемной силы в этой части лопасти. На периферии происходит принципиальное изменение характера обтекания воздухом лопасти. Слои воздуха вовлечены во вращательное движение согласно с вращением лопасти, уменьшается скорость обтекания воздухом лопасти и уменьшается подъемная сила.
Таким образом, образование водоворота (гребной винт) и образование смерча (воздушный винт) на засасывающей стороне существенно изменяет (ухудшает) условия обтекания поверхностей лопасти. Следствием этого является значительное уменьшение упора для гребного винта и подъемной силы у воздушного винта.
При перемещении массы воды в емкости, подвешенной на тросе, в силу указанных причин система вертолет - емкость может расчлениться на две системы, каждая из которых совершает движение по своей траектории. Система емкость - трос и система - вертолет могут иметь сдвиг по фазе и пересечение траектории движения. Летчик, видя потерю высоты, срочно увеличивает скорость вращения винта. Однако этим он только увеличивает интенсивность смерча, продолжает терять высоту и, возможно, входить в более интенсивные восходящие потоки, увеличивая интенсивность смерча и потерю высоты. При падении вертолет опережает облегченную емкость, пересекая горизонтальной балкой трос.
Кратко перечислим действия, приводящие к катастрофе:
1) вхождение в сильный восходящий поток на малой высоте с большой скоростью вращения винта;
2) образование смерча над винтом и потеря высоты;
3) сброс воды и уменьшение расстояния между емкостью и вертолетом;
4) увеличение скорости вращения винта;
5) увеличение интенсивности смерча и дальнейшая потеря высоты;
6) увеличение расстояния по горизонтали между вертолетом и емкостью;
7) пересечение горизонтальной балкой вертолета троса.
В результате полная потеря управлением и обреченность вертолета. Здесь возможна грубая аналогия с буксирующим автомобилем: чем больше водитель нажимает на педаль "газа", тем больше вязнет автомобиль.
Рассмотренное развитие и окончание второго участка траектории является крайним случаем попадания в очень сильный восходящий поток. По-видимому, чаще после разгрузки воды даже при наличии смерча его удается погасить за счет высвободившейся подъемной силы, которой хватает для ухода из опасной зоны. В этом случае у траектории имеется третий участок, на котором производится разгон и набор высоты.
Попытаемся ответить на вопрос: возможно ли подобное развитие событий у винтовой авиации? Восходящий поток, имеющий горизонтальную составляющую, направленную согласно с движением самолета, вряд ли вызовет смерч. Однако сильный попутный ветер (тем более ураган или шквал) способен создать смерч, ось которого вначале горизонтальна. Затем под влиянием подъемной силы (по оси смерча существует разрежение) его передняя часть поднимается и сносится встречным потоком. В случае расположения винта не по центру на смерч дополнительно действуют носовые расходящиеся волны, НРВ. Последние усложняют траекторию смерча.
Отметим, что диаметр винта вертолета не превышает 20 м. Диаметр винта самолета может достигать 3 м. Однако скорость попутного ветра может составлять 150 км/ч и более. Последнее значительно повышает вероятность возникновения смерча у малой авиации, скорость которой не превышает 400 км/ч. Наличие облачности и тумана увеличивает среднюю плотность среды перед винтом и повышает вероятность смерча.
Следствием возникновения смерча являются уменьшение упора винта, скорости набегания потока на крыло, его подъемной силы и высоты полета. Эти явления периодически повторяются в соответствии с циклами смерча и длительностью действия способствующего фактора (попутного очень сильного ветра). В результате потеря высоты может оказаться недопустимо большой. Попытки летчика набрать высоту, увеличивая скорость вращения винта, могут оказаться безуспешными, так как при этом увеличивается интенсивность смерча. Шквальный попутный ветер, по-видимому, является наиболее опасным ввиду неожиданности и возможности существования в его скоростном поле окружных составляющих. Последние могут являться дополнительным способствующим фактором.
Основным признаком предвихревого нахождения винта (точнее массы воздуха над винтом для вертолета и перед винтом для самолета) является наличие равенства А=В. Используем уравнение 6, формулу для относительной поступи винта  и уравнение 7. После подстановки и преобразований получим уравнение 6 в виде
и уравнение 7. После подстановки и преобразований получим уравнение 6 в виде

где mвр - масса воздуха с вращательным движением,
mпост - масса воздуха с поступательным движением.
Величина λp для гребного винта может изменяться в пределах 0,2-0,8. Для воздушного винта λр на порядок и более меньше. Из этого следует вывод о том, что масса вращающегося воздуха должна быть значительно меньше массы с поступательным движением по сравнению с водной средой. У воздуха плотность в 1000 раз меньше, что обуславливает необходимость наличия более мощных способствующих факторов образования вихря. Вероятность возникновения водоворота выше, чем вероятность появления смерча. Однако время жизни последнего значительно превышает время существования водоворота ввиду бóльшего демпфирования (торможения) воды.
Найдем другие признаки нахождения воздушного винта в предвихревом состоянии, используя второй закон Ньютона. При этом считаем, что часть массы воздуха, сопряженная с лопастью винта, находится под воздействием упора и крутящего момента, имеет одинаковое ускорение и описывается уравнением
Используя зависимость 9, получим уравнение 10 в виде:

Подставляя формулы для момента 2 и для упора 3 в выражение 11, получим второй признак в виде 
Рассмотрим дополнительные факторы, влияющие на возникновение смерча. Их можно разделить на способствующие и препятствующие, на долговременные и кратковременные. Увеличение числа лопастей способствует образованию смерча, так как увеличивается суммарный крутящий момент. К такому же результату приводит увеличение угла атаки, особенно на периферийной части лопасти. Использование двух винтов (спаренных), вращающихся в разные стороны, уменьшает закрутку потока. Увеличение диаметра лопастей увеличивает крутящий момент в большей степени, чем величину упора. Двухвальная модель самолета с внутренним вращением винтов способствует образованию смерча. У нее момент вращения от корпуса (фюзеляжа) направлен согласно с моментом смерча при его подъеме. При наружном вращении винтов моменты направлены встречно, что препятствует образованию смерча.
Одновальную модель самолета можно отнести к препятствующей, так как фюзеляж уменьшает закрутку в пространстве за винтом. Иногда винты располагают за крылом. Такая модель уменьшает закрутку перед винтом. Однако смерч может расчлениться на несколько менее мощных вихревых образований в соответствии с количеством лопастей.
Кратковременные факторы действуют эпизодически, в течение особых режимов движения, например, на циркуляции, при резком изменении высоты и т.п. Они способны возбудить (погасить), усилить (ослабить) смерч на один или несколько циклов. Количество циклов пропорционально длительности фактора.
Особым случаем является попадание вертолета в поток, восходящий по спирали. При согласном вращении потока и винта вероятность возникновения смерча наибольшая. Такие потоки чаще возникают над водной поверхностью и являются предвестниками естественных смерчей.
Почти каждый восходящий поток имеет ядро (центр), где вертельная составляющая скорости наибольшая. По мере движения к периферии потока эта составляющая убывает. Периферийная часть слоя двигается к центру, замещая поднявшуюся центральную. Поток имеет разные по величине горизонтальные градиенты температуры. В нем нельзя выделить изотермические окружности. Последнее обуславливает появление моментов вращения с вертикальной осью и окружных составляющих скорости. Таким образом, атрибутом каждого восходящего потока является подъем воздушных масс по кривой, подобной спирали. Станет ли поток способствующим фактором определяется направлением вращения, интенсивностью и геометрией.
Считается, что винт любого диаметра засасывает воздух равномерно. Существование перед (над) винтом вихревого образования не предполагалось. Поэтому выбор аналогов затруднен и изобретение является пионерным.
Целью изобретения является обнаружение вихревого образования над или перед винтом летательного аппарата. В результате должна быть подана команда как на срочный выход летательного аппарата (ЛА) из опасной зоны, так и на включение механизма коррекции воздушного потока, если таковой имеется.
Простое обнаружение является визуальным. Однако оно возможно при наличии в воздухе иных частиц (пыль, дым, туман и т.п.). При отсутствии этих компонентов обнаружение крайне затруднено (особенно, если смотреть сквозь вращающийся винт).
Выходом из указанного являются искусственная визуализации (например, подкрашенным сжатым воздухом) и постановка передающей телевизионной камеры над или перед винтом. При этом человеческий фактор остается. Субъективный фактор вносит неоднозначность в обнаружение вихря и в принятие решения. Автоматизация обнаружения, принятия команды и коррекции требует конкретных объективных данных, простых для анализа, обработки и связанных с состоянием ЛА. Сам вихрь может быть кратковременным явлением, не представляющим серьезной опасности.
При построении системы обнаружения необходимо взять за основу естественный процесс, состоящий из получения признаков зарождения вихря, его развития до уровня, представляющего опасность, и принятия решения. Решение должно быть своевременным, так как в случае запаздывания провал ЛА может оказаться недопустимо большим, а мощность источника коррекции воздушного потока недостаточной.
Проанализируем как реагирует ЛА и его движитель на возникновение и развитие вихря. В основном рассматриваем вертолет в режиме зависания как наиболее опасный случай. Предполагается, что двигатель работает при постоянной скорости подачи топлива. Без вихря имеет место наименьшая закрутка потока над винтом, наименьшее скольжение винта и наибольшая подъемная сила. Траектория воздушной трубки подобна эллиптической, немного закрученной кривой. Скорость пересечения винтом воздушных трубок наибольшая. Нагрузка на винт (тормозной момент) также максимальна, так как сила трения пропорциональна давлению. Вследствие указанного винт вращается с наименьшей скоростью.
При возникновении вихря воздушные трубки потока изменяют свою ориентацию относительно лопастей винта. Угол пересечения трубок винтом начинает уменьшаться. Увеличивается скольжение винта относительно воздушного потока. Уменьшается их относительная скорость. Уменьшается сила трения и тормозной момент. Движитель начинает набирать обороты и тем больше, чем сильнее закручен воздушный поток. При этом растет вращающий момент винта (см. фиг.2). Процесс имеет лавинообразный характер. В результате резко меняется характер обтекания лопастей. Лопасть теряет свойства крыла, резко уменьшается подъемная сила, КПД движителя приближается к нулю.
Таким образом, имеем один прямой признак и три косвенных. Последние действуют в совокупности. Использование четырех признаков в одной системе повышает вероятность обнаружения. Однако такой принцип является сложным и дорогим. Возможно использование только трех косвенных признаков, содержащихся в высоте В, оборотах О и в топливе Т, точнее в их приращениях (производных по времени). Наличию вихря над винтом характерны следующие производные:

Они имеют место в режиме зависания. Способ обнаружения вихря в этом режиме должен состоять из следующих действий.
1. Измерение текущих значений параметров В, О и Т в момент 1.
2. Измерение текущих значений параметров В, О и Т в момент 2.
3. Вычисление разности текущих значений параметров В, О и Т, измеренных в моменты 1 и 2.
4. Определение знака полученных разностей (приращений) параметров В, О и Т.
5. Сравнение знака приращений со знаками, характерными для рассматриваемого случая.
6. Сравнение абсолютного значения приращений со значениями, характерными для рассматриваемого случая.
7. Исключение из рассмотрения приращений параметров В, O и Т, попадающих в область фоновых флуктуаций.
8. Формирование решения - команды.
9. Включение исполнительного органа и сигнализации.
10. Повторение (при необходимости) п.п.1-9.
Очевидно возникновение вихря возможно и при других режимах пилотирования, например при снижении, при подъеме, при сложном маневрировании, когда имеется возможность попадания в отраженный от препятствия оставленный собственный вихрь или вихрь летящего впереди вертолета (особенно при наличии восходящего потока). Отметим, что от летящего вертолета распространяются волны, способные отражаться от земли и других препятствий.
Рассмотрим другие режимы. При подъеме имеем производные в виде:

где  - производные, характерные для штатного (обычного) режима,
- производные, характерные для штатного (обычного) режима,  - производные при вихревом образовании. Способ обнаружения вихря состоит из действий, по форме аналогичных рассмотренным. Однако их содержание определяется неравенствами 14. На практике может оказаться, что неравенства <,> следует заменить на ≪и≫.
- производные при вихревом образовании. Способ обнаружения вихря состоит из действий, по форме аналогичных рассмотренным. Однако их содержание определяется неравенствами 14. На практике может оказаться, что неравенства <,> следует заменить на ≪и≫.
При снижении имеем производные в виде:

где  - производные, характерные дли штатного режима,
- производные, характерные дли штатного режима,  - производные при вихревом образовании.
- производные при вихревом образовании.
Способ обнаружения вихря состоит из аналогичных действий, содержание которых определяется неравенствами 15.
При медленном перемещении по "горизонтали" (особенно при полной нагрузке) производные можно представить в виде:

где - производные, характерные для штатного режима, - производные при вихревом образовании.
Способ обнаружения вихря состоит из указанных действий, содержание которых определяется неравенствами 16.
Важным действием является систематическая проверка штатной работы двигателя. Она заключается в проверке соответствия скорости вращения вала скорости подачи топлива при данной нагрузке. В случае несоответствия система обнаружения должна быть заблокирована (отключена), так как используемые признаки при неисправном двигателе могут содержать неопределенность. Иными словами, при формировании решения (п.8 перечня действий) должно быть учтено состояние двигателя. Вероятность выхода из строя редуктора (пассивное звено) значительна меньше.
Изменения во времени параметров В, О и Т имеют инфронизкочастотный характер (частота их изменений составляет доли герц). Обычные электронные способы вычисления (определения) производных в этом частотном диапазоне непригодны. В этом случае необходимо использовать оперативную память. С учетом этого действия (п.п.1-9) должны заканчиваться запоминанием. Результат каждого действия должен запоминаться. После окончания цикла информация стирается и система готова для дальнейшей работы.
Реализация способа потребует проведения предварительной работы, состоящей в следующем: расчленение летной работы на типовые режимы, выбор из них наиболее вероятных для образования вихря, определение численных значений (среднестатистических) производных параметров В, О и Т в штатном режиме. Необходимо использовать протоколы происшествий и анализ показаний регистраторов режимов полета ("черных ящиков") вертолетов, особенно потерпевших аварию. Анализ должен уточнить как характер, так и численные соотношения вышеиспользованных неравенств. По-видимому, указанные регистраторы являются хорошим источником информации. Однако их анализ необходимо провести с позиций предлагаемой физики образования и развития вихря над винтом вертолета.
Как в способе, так и в устройстве рассмотрение аналогов и сравнительный анализ с прототипом невозможен, так как предлагаемое изобретение является пионерным. Образование вихря над (перед) винтом ЛА не рассматривалось.
Способ обнаружения вихревого образования над (перед) винтом ЛА связан со способом борьбы с этим образованием. Последнее заключается в перегораживании пространства над (перед) винтом в момент зарождения вихря. Оптимальным способом для этого является перегораживание плоской струей сжатого воздуха, направленной по радиусу винта от центра к периферии или от периферии к центру вращения винта. Струя сжатого воздуха располагается параллельно диску винта, а ее плоскость перпендикулярна диску.
С целью существенно повлиять на вихрь (изменить его траекторию) кинетическая энергия струи должна быть примерно равной энергии вихря. Для визуализации вихря струя должна обладать значительно меньшей энергией. Ее воздействие на структуру воздушного потока должно быть наименьшим. Указанное выполняется регулированием длительности импульса. В первом случае импульс должен быть сравнительно длинным (продолжительным), во втором случае - коротким. Так дозируется масса струи.
Система сжатого воздуха включает баллон - источник сжатого воздуха, трубопровод, запорный вентиль или клапан и сопло-отверстие. Баллон расположен в корпусе ЛА. Сопло-отверстие монтируется на короткой перегородке и струя сжатого воздуха является ее продолжением. Сопло имеет внутренний профиль, позволяющий создавать подобие перегородки с наличием в струе составляющих, направленных навстречу вращению винта и к его диску (сменные насадки).
У вертолета перегородки могут крепиться как на задней верхней точке горизонтальной балки, так и на вертикальном штоке, проходящем через полость вала несущего винта. Примерно в тех же самых местах могут располагаться передающие телевизионные камеры, с помощью которых возможно обнаружение вихря. Подразумевается, что видеоконтрольное устройство (ВКУ) замкнутой телевизионной системы находится на приборной панели экипажа. На самолете возможно аналогичное крепление с использованием фюзеляжа или крыла вместо горизонтальной балки.
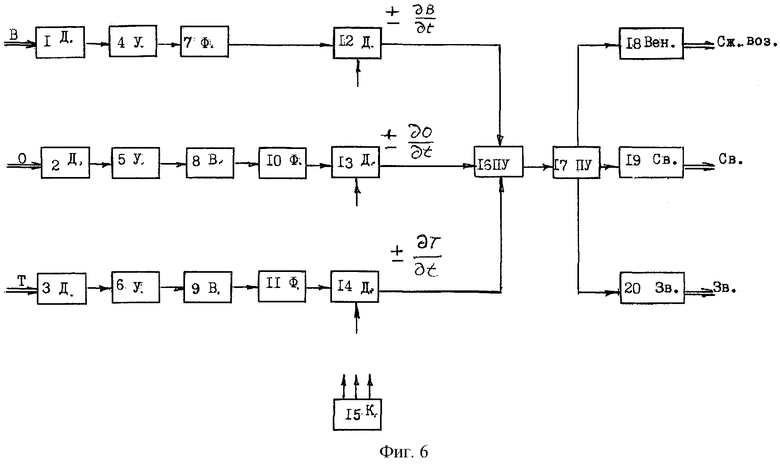
На фиг.6 представлена структурная схема системы обнаружения вихревого образования в аналоговом исполнении. Блоки 1, 2 и 3 являются первичными измерителями высоты полета В, скорости вращения винта О (количество оборотов в единицу времени) и расхода топлива Т. В качестве измерителей могут использоваться как штатные, применяемые на ЛА, так и специальные. В обоих случаях потребуются согласующие устройства. Однако их расположение в структурной схеме будет различным. Первичные измерители предназначены для преобразования неэлектрических величин В, О и Т в электрические. Измерители располагаются вблизи от источника информации, что уменьшает их погрешность.
Блок №1 - измеритель высоты (статического давления атмосферы). Возможна следующая конструкция (10, с.589). В качестве чувствительного элемента используется анероидная коробка с реостатным преобразователем. Последний включается в измерительный мост, питаемый постоянным или переменным током (одна диагональ моста). Ко второй диагонали подключен вход предварительного усилителя 4, нагруженный фильтром низкой частоты 7 и имеющий орган масштабирования. В случае цифрового варианта фильтр низкой частоты (ФНЧ) нагружается аналого-цифровым преобразователем (АЦП). Вместо метода прямого измерения может быть использован метод с уравновешиванием. Он обладает меньшей погрешностью, однако является более сложным.
Блок №2 - измеритель скорости вращения вала несущего винта. Методы измерения скорости изложены на с.602 (см.10). Используются тахометры индукционные, частотные и стробоскопические. Для рассматриваемого случая возможно использование индукционного тахометра (генератора постоянного тока). Магнитная система располагается на вращающемся валу. При этом наличие щеточно-коллекторного аппарата существенно снижает надежность устройства. Возможно использование синхронного генератора (10, с.453) совместно с конденсаторным частотомером. Последнее позволяет иметь на выходе постоянное напряжение, пропорциональное скорости вращения вала, и при необходимости использовать типовой АЦП. Очевидно после частотомера возможна постановка ФНЧ.
Блок №3 - измеритель скорости поступления топлива к двигателю (расходомер). Методы измерения параметров движения жидкостей изложены в 10 на c.617. Наиболее подходящими являются следующие. Индукционный расходомер (10, с.621) требует использования предварительного усилителя 6 с повышенным коэффициентом передачи, наличия в качестве нагрузки выпрямителя 9 и ФНЧ 11. Удельное сопротивление топлива должно находиться в диапазоне 103-105 (Ом·м). Тахометрический расходомер (10, с.455) использует турбину, помещенную в трубопровод. Последнее является существенным недостатком.
При отсутствии штатных измерителей параметров В, О и Т или непригодности необходимо разработать их. Первичные измерители, состоящие из датчиков и усилительно-преобразовательных частей, в настоящее время чаще выполняются в аналоговом виде. Их функциональная схема такова. Датчик, преобразующий неэлектрическую величину в электрическую, располагается на объекте измерения. Предварительный усилитель масштабирует сигнал, полученный от датчика, и в некоторых случаях корректирует его нелинейность. Выпрямитель или фазочувствительный выпрямитель нагружает предварительный усилитель в случае передачи информации с помощью модуляции несущей частоты. Затем следует фильтр низкой частоты, пропускающий только инфранизкие частоты, в которых содержится информация об изменениях параметров В, О и Т.
В случае наличия цифрового датчика рассмотренная последовательная цепь должна строиться с использованием цифровых методов. Тем более, что далее следует дифференцирование, ограничение, компарирование и логика. Учитывая изложенное, автор в формуле использует обобщенный термин - измеритель.
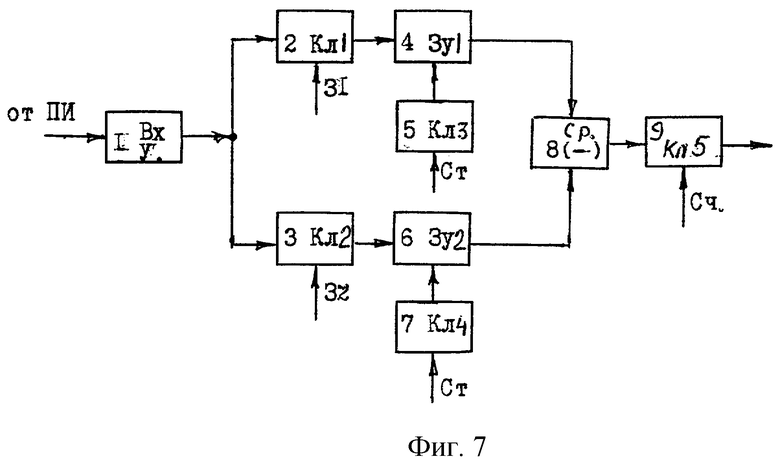
Блоки №№ 12, 13 и 14 - однотипные дифференцирующие устройства, вычисляющие инфранизкочастотные приращения параметров В, О и Т. Устройство принимает, запоминает и передает в звено сравнения (вычитания) мгновенные значения как предыдущего, так и последующего параметра. На фиг.7 представлена функциональная схема устройства. Запоминание выполняется звеньями 4 и 6. Прием информации производится с помощью ключей (звенья 2 и 3). Считывание - ключом 5 (звено 9). Стирание информации осуществляется ключами 3 и 4 (звенья 5 и 7).
Запоминающие устройства ЗУ1 и ЗУ2 могут выполняться с использованием конденсатора, подключенного к входу усилителя с большим входным сопротивлением. При стирании конденсатор шунтируется ключом. Звено сравнения 8 вычитает из последующего значения параметра предыдущее.
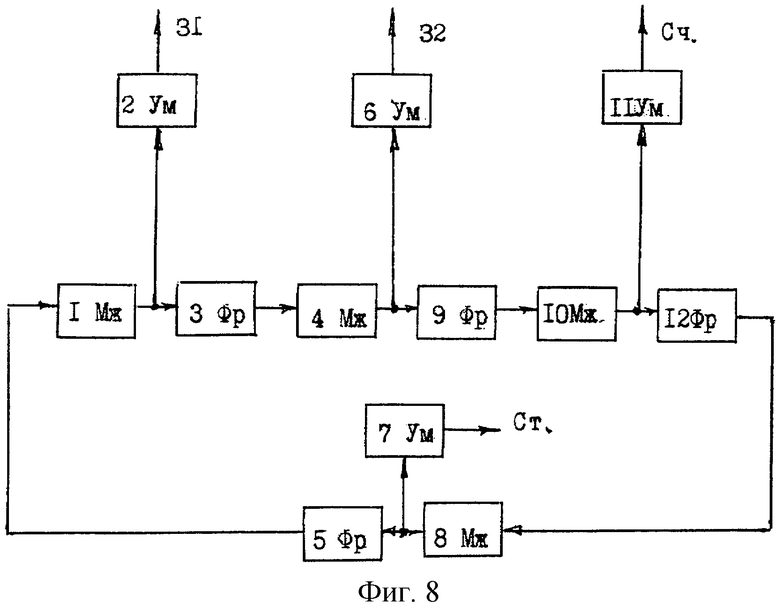
На фиг.8 представлена одна из возможных функциональных схем коммутационного генератора (блок №15, фиг.6), являющегося атрибутом рассмотренного дифференцирующего устройства. Генератор может быть построен по кольцевой схеме, состоящей из повторяющегося набора ждущих мультивибраторов 1, 4, 10, 8, формирователей коротких импульсов 3, 9, 12, 5 (мультивибратор запускается от заднего фронта импульса, вырабатываемого предыдущим мультивибратором). Выход каждого мультивибратора нагружен усилителем мощности (звенья 2, 6, 11, 7), позволяющим подключать несколько ключей. Первый запускающий импульс формируется специальной схемой. Первый мультивибратор вырабатывает импульс, в течение которого ЗУ1 подключено к первичному измерителю. Второй мультивибратор генерирует импульс для подключения ЗУ2 к ПИ. Третий мультивибратор подключает нагрузку к схеме сравнения (операция считывания). Далее следует стирание информации от импульса четвертого мультивибратора и цикл повторяется.
Итак, начальная часть устройства преобразует три неэлектрические величины В, О и Т в электрические и определяет (вычисляет) их производные по времени. Средняя часть устройства должна анализировать производные, выявляя наличие неравенств 13-16 (режимы полета №№1-4). Результатом анализа должна быть команда-сигнал обнаружения вихревого образования. Эта часть устройства сосредоточена в блоках 16 и 17 (фиг.6).
Средняя часть устройства может быть выполнена двояко. Во-первых, в виде отдельных схем, каждая из которых предназначена для одного из перечисленных режимов полета (фиг.9-12). Переключение (выбор) схемы может быть как ручным, так и автоматическим. Напомним, что устройство включается эпизодически, на наиболее опасных участках. В основное время полета устройство выключено. При этом может оказаться полное отсутствие его необходимости. Второе исполнение устройства может быть универсальным, пригодным для всех режимов полета.
Оконечная часть устройства (фиг.6, блоки №№18-20) должна принять сигнал-команду и включить силовые звенья. Последние открывают запорный вентиль системы сжатого воздуха, создавая преграду для вихря, и приводят в действие звуковую и световую сигнализации, оповещая экипаж о нахождении ЛА в опасной зоне.
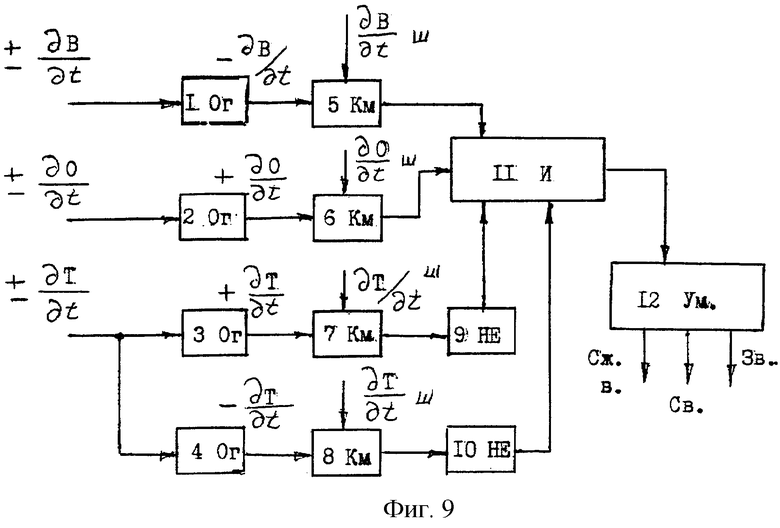
Рассмотрим подробнее блоки 16 и 17 фиг.6. На фиг.9 изображена функциональная схема средней части устройства для режима №1. Схема состоит из набора логических элементов, позволяющих обнаружить наличие неравенства 13. На входы схемы поступают производные параметров B, О и Т. Ограничителями (односторонними) из производных выделяются производные со знаком в соответствии с неравенством 13 (элементы 1-4). С помощью компараторов 5-8 (на их выходах) создаются импульсы-единицы, при выполнении указанных неравенств. Последнее выполняется путем подачи на второй вход каждого компаратора опорного напряжения соответствующего уровня.
Значения опорных напряжений выбираются на основании статистики полетов данной модели ЛА. Ограничители 1-4 пропускают сигналы одной полярности + или -. Они являются селекторами полярности. Компараторы являются селекторами амплитуды (ограничение снизу параметров В, О и Т). Условие выполнения третьего неравенства (параметр Т) требует расчленения сигнала на два (по признаку полярности) и постановки в каждый канал логического элемента НЕ. Последнее позволит иметь 1 на выходе канала в случае нахождения расхода топлива в штатном диапазоне.
На выходе схемы стоит элемент И, имеющий четыре входа. При наличии четырех единиц (выполняется неравенство 13) на выходе элемента И возникает 1, т.е. команда на включение силовых звеньев. Оконечным звеном является импульсный усилитель мощности, имеющий три выхода по числу потребителей. В качестве нагрузки используется реле времени, определяющее длительность работы оконечной части устройства.
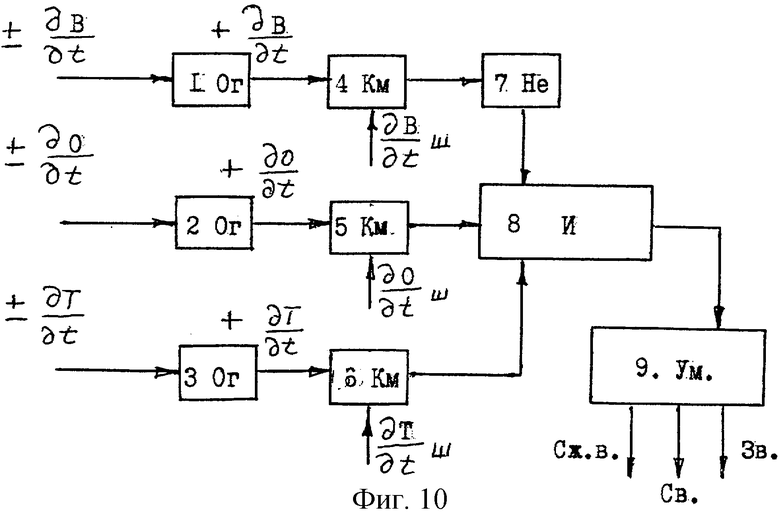
Режим №2 определяется неравенством 14, и обнаружение вихря обеспечивается схемой фиг.10. Схема подобна рассмотренной. Однако элемент НЕ стоит в цепи параметра В. Последнее позволяет удовлетворить первое неравенство в системе неравенств 14. Иными словами при превышении производной параметра В над ее штатным значением на входе элемента И будет 0. Такую инверсию осуществляет элемент НЕ.
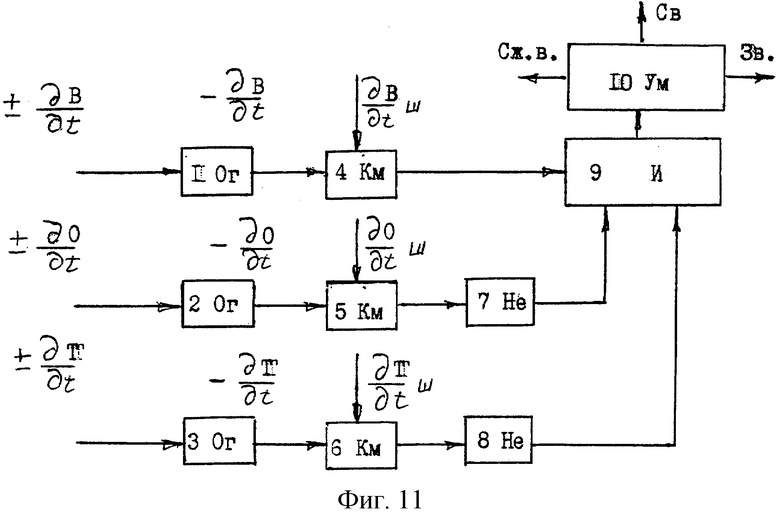
Режим №3 определяется неравенством 15, и обнаружение вихря обеспечивается схемой фиг.11. Схема подобна рассмотренным. Однако элементы НЕ включены в цепи параметров О и Т. Последнее позволяет выполнить неравенства второе и третье в системе неравенств 15.
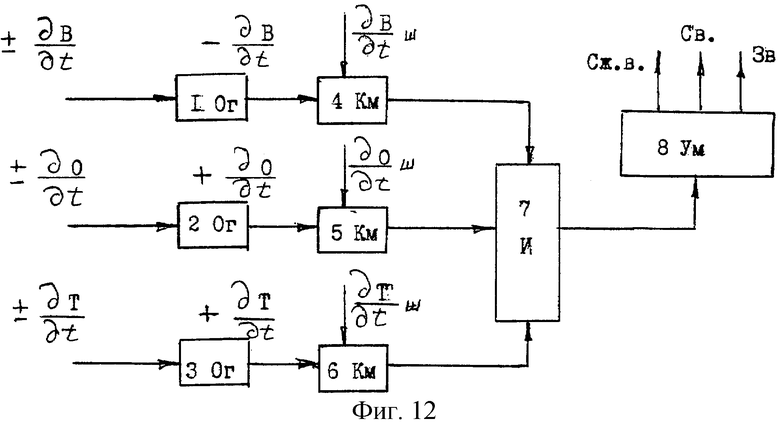
Режим №4 определяется неравенством 16, и обнаружение вихря обеспечивается схемой фиг.12. Схема подобна рассмотренным. Однако она проще, так как отсутствуют элементы НЕ. Последнее обуславливается одинаковым характером всех неравенств в системе 16.
Во избежание попадания на вход компараторов высокочастотных составляющих параметров возможна постановка ФНЧ после ограничителей. В рассмотренных схемах используется сложный усилитель мощности, состоящий из трех, работающих параллельно. Это позволяет исключить возможную паразитную связь по входу потребителей (реле времени). Назначение реле времени заключается в подключении к питанию трех исполнителей команды "вихрь обнаружен": световой и звуковой сигнализации и механизма поворота запорного вентиля системы сжатого воздуха в положение "открыто". При этом длительность подключения потребителей может быть разной. Время включения системы сжатого воздуха особенно ограничено ввиду необходимой экономии.
Возможно объединение схем (фиг.9-12) в одну. Однако на первых порах лучше использовать четыре схемы и ручное переключение. Последнее облегчит набор статистического материала и уточнение необходимых производных. Испытание макета устройства поможет также определить необходимость использования счетчика импульсов, включенного в разрыв между схемой И и усилителем мощности. При этом на время действия сигнала-команды схема не должна чувствовать поступающие производные, а после окончания команды должна приходить в исходное состояние. Это относится к счетчику импульсов.
Возможно использовать не три реле времени, а два: одно для системы сжатого воздуха и одно для сигнализации световой и звуковой Реле времени на выходе могут создавать импульс напряжения определенной (регулируемой) длительности, а также содержать группу контактов, работающих с установленной выдержкой.
В период действия реле времени (после его запуска) исполнительная система нечувствительна к командам. Обоснование длительности выдержки реле и периода дифференцирования является специальным вопросом, относящимся к техническому проектированию. Однако общим и главным является безопасность полета. При этом система обнаружения в большинстве случаев является разовой.
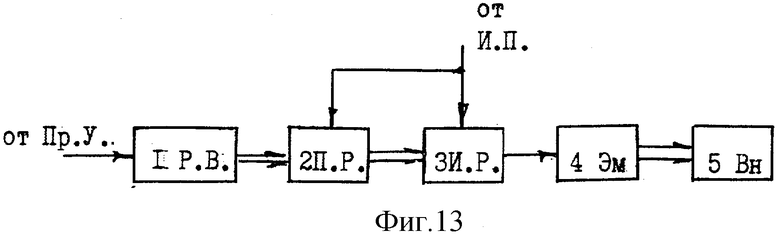
Рассмотрим подробнее исполнительную часть (оконечную). На фиг.13 представлена функциональная схема открытия запорного вентиля системы сжатого воздуха. Реле времени 1 под воздействием сигнала-команды вырабатывает прямоугольный импульс. От переднего фронта импульса замыкаются контакты промежуточного реле 2. Последние подключают цепь обмотки возбуждения исполнительного (силового) реле 3 к источнику питания. Замыкаются контакты реле 3, подключая обмотку возбуждения электромагнита 4 к источнику питания. Электромагнит 4 срабатывает, приводя в действие механизм открытия вентиля. Струя сжатого воздуха из баллона устремляется по трубопроводу к соплу-отверстию и перегораживает пространство над или перед винтом ЛА. Вихревое образование воздушного потока деформируется, уменьшая свою интенсивность. Восстанавливаются условия обтекания лопастей винта, и восстанавливается подъемная сила.
Длительность импульса такова, чтобы его воздействие было эффективным, а расход сжатого воздуха экономным. Первая порция сжатого воздуха может быть подкрашенной. Это визуализирует воздушный поток и помогает контролировать эффективность работы системы.
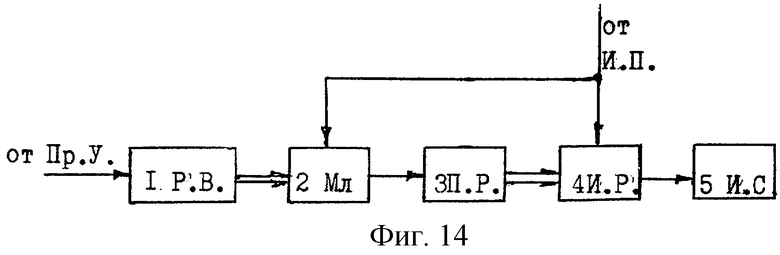
На фиг.14 представлена функциональная схема световой сигнализации. Реле времени 1 под воздействием сигнала-команды, полученного от промежуточного устройства, вырабатывает прямоугольный импульс напряжения. Под воздействием импульса в реле времени замыкаются контакты, подключая к источнику питания мультивибратор 2, работающий в автоколебательном режиме. Частота и длительность импульсов мультивибратора подбираются с целью создания приемлемого для восприятия режима работы источника света 5. В качестве нагрузки на мультивибратор используется промежуточное реле 3 (обмотка возбуждения). Последнее своими контактами подключает к источнику питания обмотку возбуждения исполнительного реле 4, осуществляющего импульсное подключение источника света 5 к питанию.
Возможна упрощенная система световой сигнализации, работающая в режиме постояного свечения, без мультивибратора, без силовых реле, с использованием светодиодов. Заметим, что там, где это возможно, электромагнитные реле должны быть заменены на ключевые схемы с использованием бесконтактных типовых элементов. Использование электромагнитных реле в описании обусловлено простотой изложения материала.
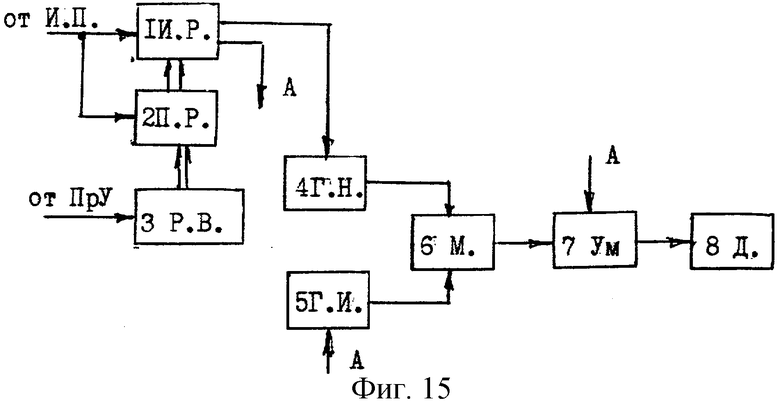
На фиг.15 представлена функциональная схема звуковой сигнализации обнаружения вихря. Реле времени 3 (оно может быть общим для систем световой и звуковой сигнализации) под воздействием сигнала-команды вырабатывает прямоугольный импульс напряжения. Под воздействием импульса последовательно срабатывают промежуточное реле 2 и исполнительное реле 1. Последнее подключает к источнику питания низкочастотный генератор 4, инфранизкочастотный генератор 5 и усилитель мощности 7. С помощью модулятора 6 производится амплитудная модуляция несущей частоты генератора 4 частотой генератора 5. Например, несущая частота мажет составлять 400 Гц, а модулирующая - доли Гц. Такое соотношение наиболее благоприятно для человеческого уха.
Модулированный сигнал обнаружения вихря через усилитель мощности 7 поступает на обмотку возбуждения динамика 8. Возможна упрощенная схема звуковой сигнализации, без генератора 5 и модулятора 6. Однако ее сигнал на фоне значительного шума имеет меньшую вероятность выделения.
Очевидно, рассмотренные системы могут использоваться как в комплексе, так и поодиночке. Своевременное обнаружение вихря позволяет путем правильного маневрирования вывести ЛА из опасной зоны, изменяя режим полетами без воздействия сжатым воздухом. Например, при зависании необходимо придать вертолету горизонтальную скорость. При медленном горизонтальном перемещении необходимо существенно увеличить скорость. При режимах №2 и №3 следует также увеличить горизонтальную скорость. При этом должен выполняться основной принцип: при возникновении вихря необходимо существенно изменить режим полета, не усугубляя положение. Очевидно, данные рекомендации являются приблизительными и нуждаются в уточнении.
Дополним изложенное следующим. Реле времени является специальным реле, и в его основе может быть ждущий мультивибратор. Последний срабатывает в случае прихода на его вход короткого импульса, получаемого дифферинцированием переднего фронта сигнала-единица. Времязадающая цепь мультивибратора определяет длительность сигнала-команды. После мультивибратора размещен усилитель мощности, нагруженный обмоткой возбуждения реле. Последнее определяет контактную группу реле времени.
Схемы компараторов подробно изложены в 8 на с.175-190 и в 9 на с.207-210. Схемы мультивибраторов - в 9 на с.210-214.
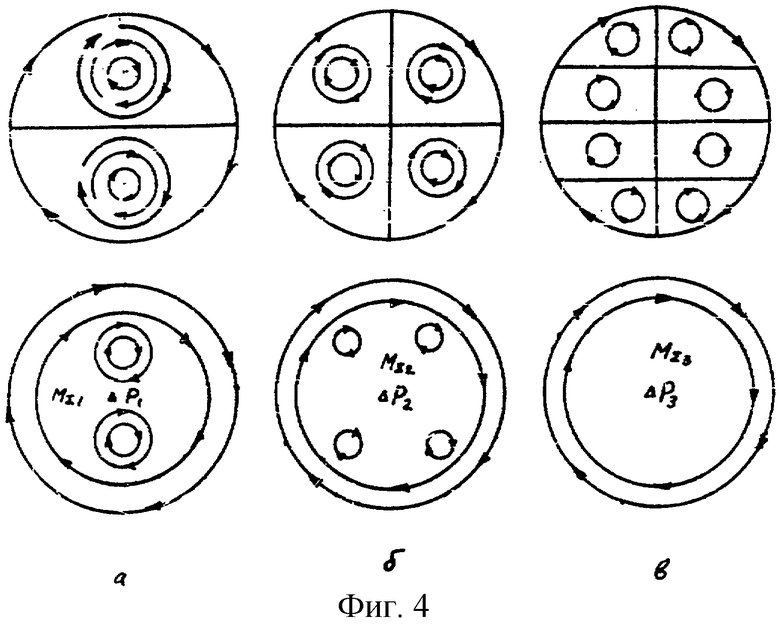
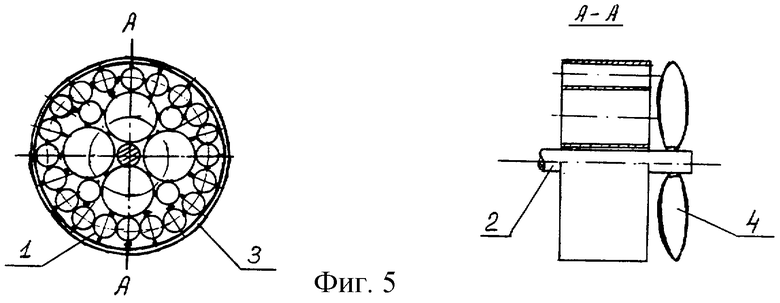
На фиг.4 схематически показано разбиение общего вихря на составляющие перегородками. Уменьшение интенсивности общего вихревого образования происходит за счет встречного движения составляющих внутри пространства над (перед) винтом. При этом чем больше составляющих, тем большая степень взаимной компенсации вращения. На фиг.5 приводится пример конструкции - системы ячеек перед гребным винтом. Одним из механизмов поворота запорного вентиля может быть шатунно-кривошипный. Конструкция запорного клапана может основываться на стержне-якоре электромагнита с использованием пружины.
Сущность и отличительные признаки по п.7 формулы заключаются в том, что в устройстве для обнаружения вихреобразования над или перед винтом летательного аппарата (ЛА) имеется сопло-отверстие системы сжатого и подкрашенного воздуха, состоящей из источника, трубопровода и запорного вентиля или клапана; источник соединяется с сопло трубопроводом, перекрываемым вентилем или клапаном; сопло-отверстие профилировано так, чтобы струя сжатого воздуха, выходящая из него, являлась бы продолжением перегородки, направленной по радиусу винта, перпендикулярно его диску; перегородка имеет консольное закрепление у вертолета с одним несущим винтом к штоку на верхней, дальней точке горизонтальной балки; для вертолета с двумя несущими винтами перегородки крепятся консольно к вертикальному штоку, расположенному между винтами; у самолета с одним винтом перегородка крепится консольно к штоку, расположенному на фюзеляже, у многовинтового самолета - к штоку, расположенному на крыле между винтами; на ЛА устанавливается замкнутая телевизионная система, состоящая из передающей трубки и видеоконтрольного устройства, соединенных кабелем; трубка монтируется у перегородки и обращена к диску винта.
Сущность и отличительные признаки по п.8 формулы заключаются в том, что в устройстве для обнаружения вихреобразования над или перед винтом ЛА имеется сопло-отверстие системы сжатого и подкрашенного воздуха, состоящей из источника, трубопровода и запорного вентиля или клапана; при этом источник соединяется с сопло трубопроводом, перекрываемым вентилем или клапаном; сопло-отверстие профилировано так, чтобы струя сжатого воздуха, выходящая из него, являлась бы продолжением перегородки, направленной по радиусу винта, перпендикулярно его диску, от оси винта к его периферии; перегородка имеет консольное закрепление к штоку, проходящему через продольную полость вала несущего винта; на ЛА устанавливается замкнутая телевизионная система, состоящая из передающей трубки и видеоконтрольного устройства, соединенных кабелем; трубка монтируется у перегородки и обращена к диску винта.
Литература
1. Басин A.M., Миниович И.Я. Теория и расчет гребных винтов. - Л.: Судпромгиз, 1963.
2. Бушмарин О.Н. Закрученная струя в спутном потоке жидкости той же плотности. - Л.: Труды ЛПИ №176, 1955.
3. Мясищев В.И (ред.). Физические основы подводной акустики. - М.: Сов. радио. 1955.
4. Нейман Л.Р., Калантаров П.Л. Теоретические основы электротехники. Часть 3. - М.Л.: Госэнергоиздат, 1959.
5. Холмс Т. Знаменитые самолеты и вертолеты (справочник), пер. с англ. Мамаева А.И. - М.: Астрель, ACT. 2002.
6. Яворский Б.М., Детлаф А.А. Справочник по физике. - М.: Физматгиз, 1960.
7. Гутников B.C. Интегральная электроника в измерительных устройствах. - Л.: Энергия, 1980.
8. Алексенко А.Г. и др. Применение прецизионных аналоговых микросхем - М.: Радио и связь, 1985.
9. Шило В.Л. Линейные интегральные схемы в радиоэлектронной аппаратуре. - М.: Сов.радио, 1979.
10. Туричин A.M. Электрические измерения неэлектрических величин. - М.Л.: Энергия, 1966.
11. Пашуков Е.Б. Способ и устройство улучшения гидродинамических характеристик гребного винта (вар.) - заявка на изобретение №2004110419/11(011197) от 06.04.2004.
12. Пашуков Е.Б. Способ и устройство улучшения аэродинамических характеристик воздушного винта (вар.) - заявка на изобретение №2004115775/11(016806) от 24.05.2004.
13. Пашуков Е.Б. Способ и устройство улучшения аэродинамических характеристик воздушного винта (вар.) - заявка на изобретение №2004135662/11(038785) от 06.12.2004.

Изобретение относится к авиационному приборостроению и может быть использовано в летательных аппаратах (ЛА) с тянущим или несущим винтом. Способ для обнаружения вихревого образования (ВО) над или перед винтом ЛА состоит в том, что пространство над или перед винтом временно перегораживают струей сжатого воздуха, при этом подкрашивают ее в цвет, удобный для визуализации. Струю направляют по радиусу винта от его периферии к оси вращения, параллельно его диску. Струю разгоняют до скорости, примерно равной скорости вращения винта, дозируют массу струи так, чтобы ее кинетическая энергия была значительно меньше кинетической энергии зарождающегося среднего вихря. Струю формируют в виде подобия перегородки, пересекающей преимущественно периферийную часть диска и возвышающейся над ней на высоту среднего по интенсивности зарождающегося вихря. На ЛА устанавливают замкнутую телевизионную систему, ее передающую трубку ориентируют с наклоном к диску винта. Видеоконтрольное устройство устанавливают перед рабочим местом оператора и просматривают пространство над или перед винтом. Устройство для обнаружении ВО над или перед винтом ЛА аппарата характеризуется тем, что над или перед винтом установлена одна перегородка, имеющая на конце, обращенном к периферии винта, сопло-отверстие системы сжатого и подкрашенного воздуха. Эта система состоит из источника, трубопровода и запорного вентиля или клапана. Источник соединен с соплом трубопроводом, перекрываемым вентилем или клапаном. Сопло-отверстие спрофилировано так, чтобы струя сжатого воздуха, выходящая из него, являлась бы продолжением перегородки, направленной по радиусу винта, перпендикулярно его диску, а ось струи была бы параллельна диску винта и достигала его периферийную часть. Перегородка имеет консольное закрепление к штоку, проходящему через продольную полость вала винта. На ЛА установлена замкнутая телевизионная система, состоящая из передающей трубки и видеоконтрольного устройства, соединенных кабелем. Трубка смонтирована у перегородки и обращена к диску винта. Видеоконтрольное устройство установлено перед рабочим местом оператора. Технический результат заключается в повышении точности обнаружения ВО над (перед) винтом ЛА. 6 н. и 6 з.п. ф-лы, 16 ил.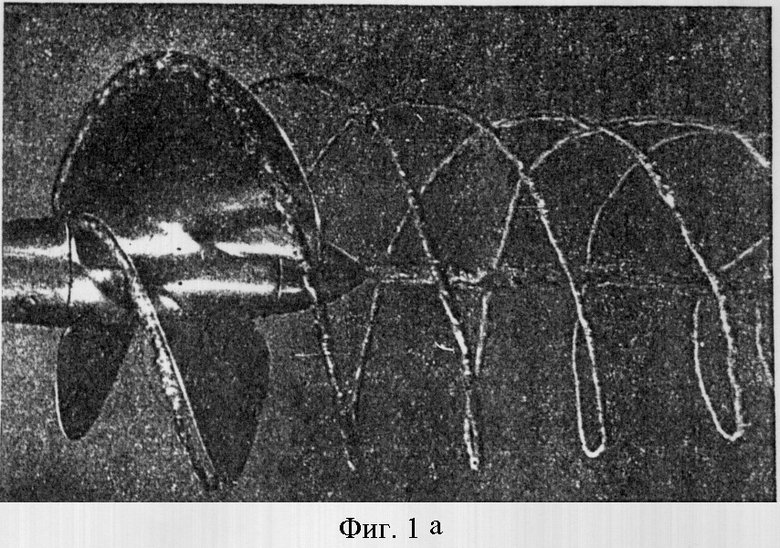
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Е.И.Ружицкий | |||
| Воздушные вездеходы | |||
| М., "МАШИНОСТРОЕНИЕ", 1964, с.32, фиг.24а. | |||

