Изобретение относится к гидро- и аэродинамике объектов, находящихся и движущихся в различных средах: в воде, в воздухе и в безвоздушном пространстве. Объектом-носителем, ОН является обтекаемое во всех направлениях тело. ОН симметрично относительно трех взаимно перпендикулярных осей, пересекающихся в одной точке, являющейся центром тяжести и массы. ОН имеет горизонтальные размеры, превышающие вертикальные. Последнее увеличивает устойчивость и уменьшает лобовое сопротивление ОН при горизонтальном движении.
ОН снабжается шестью системами электромагнитных движителей, вмонтированных в его корпус. Каждая система симметрично охватывает свою ось, располагаясь по одну сторону от центра ОН. Такое расположение обеспечивает движение во всех направлениях, вращение вокруг осей, зависание и быструю смену знака ускорений и скоростей. Аналоги подобного автору неизвестны.
В каждой системе имеется четное число пар движителей. У каждой пары суммарный момент вращения равен нулю за счет встречного перемещения полей. Каждый движитель состоит из разрядного устройства, РУ, обращенного статора, ОС и возможного магнитного шунта-отражателя, ШО (8-11).
Аналогами ОС являются статор асинхронного двигателя [1, с.270-276], статор управляемого асинхронного двигателю [2, с.128-161], обращенный асинхронный двигатель (12), отъемная индукционная единица (14) и статор электромагнитного перемешивателя (13). Аналоги РУ автору неизвестны.
РУ создает на поверхности ОН свободные электрические заряды, а ОС своим магнитным полем отодвигает их от поверхности, образовывая дефицит плотности. При этом электрическое поле РУ и магнитное поле ОС синхронно перемещаются вокруг оси ОН.
Понимая, что магнитное поле может воздействовать только на свободные электрические заряды, находящиеся в пограничном слое (степень воздействия определяется силой Лоренца), условно заменим это воздействие на обычное, механическое, подобное от действия вращающегося диска, кольца или винта. Такое упрощение позволит приблизительно оценить необходимые скорость и мощность вращения. Далее в эти цифры будут внесены поправки.
С целью создания вращающегося магнитного поля используется принцип, лежащий в основе работы асинхронного двигателя (используется только статор). Его магнитная система проходит через внутреннюю часть, включающую воздушный зазор и ротор. В предлагаемой магнитной системе магнитный поток выходит на внешнюю поверхность статора (зубцы обращены от оси вращения, а ярмо перенесено внутрь).
Указанное пространство обладает магнитной проводимостью, более низкой по сравнению с магнитопроводом, выполненным, например, из электротехнической стали. При индукции, равной 1 Тл, падение намагничивающей силы на единицу длины потока по воздуху в 50-300 раз больше, чем на ферромагнитных участках магнитопровода. При индукции в зубцах в 2 Тл это отношение уменьшается до 6-8 [3, с.66]. Очевидно, что в предлагаемой конструкции статора (назовем его обращенным статором) необходимо до минимума снизить длину пути магнитного потока вне магнитопровода (от полюса до полюса). Это достигается увеличением до возможного максимума числа пар полюсов.
Другое мероприятие заключается в подъеме индукции до возможного максимума в зубцах статора. Оно возможно за счет выбора материала магнитопровода и оптимальной геометрии. Длина пути магнитного потока по магнитопроводу должна значительно превышать длину пути вне его. При этом не должно происходить насыщение магнитопровода.
Рассмотренное подтверждается формулой для величины номинального пускового момента, приходящегося на один ватт потребляемой мощности для асинхронного двигателя с полым ротором [2, с.148-152]
где Р - число пар полюсов, f - частота питающей сети, А - коэффициент, структуру которого можно определить из указанного источника.
В соответствии с [1, c.271] вращающий момент многофазного асинхронного двигателя определяется выражением
где: mФ - число фаз статора, UФ - фазное напряжение питающей сети, ω1 - угловая синхронная скорость вращающегося поля, K - сомножитель, включающий электрическое сопротивление и скольжение.
Из выражения 2 следует, что момент можно увеличить да счет увеличения напряжения (наиболее эффективно) числа фаз и снижения электрического сопротивления пограничного слоя среды, в которую помещен обращенный статор. Увеличение первых двух величин осуществляется обычными схемными решениями. Уменьшение сопротивления возможно за счет искусственного внесения в пограничный слой вещества (его раствора), например электролита. Увеличение электропроводности возможно путем предварительной ударной ионизации. Последняя возникает (сопровождает) процесс раскрутки пограничного слоя.
Основное назначение обращенного статора заключается в воздействии на пограничный слой среды (снижение лобового сопротивления), в которой движется объект (аппарат). Обращенный статор устанавливается в головной части аппарата перед и на самом напряженном (в смысле лобового сопротивления) участке. При этом ось вращения магнитного поля должна совпадать с продольной осью симметрии аппарата.
В указанной системе пограничный слой находится под действием центробежной силы, силы противодействия вхождению в магнитное поле и силы трения. Вкладывая энергию в магнитное поле обращенного статора, мы уменьшаем силу давления среди на корпус, т.е. силу трения. Последнее приводит к значительной экономии энергии главной энергетической установки.
Кинетическая энергия вращающегося пограничного слоя определяется по формуле
где m - масса пограничного слоя, V - линейная скорость вращения пограничного слоя.
Массу пограничного слоя можно рассчитать по формуле

где геометрические параметры слоя: L - длина, R - наименьший радиус, δ - толщина, ρ - плотность слоя.
Синхронная (угловая) скорость вращения магнитного поля имеет зависимость
Центробежная сила, обусловленная вращением магнитного поля, имеет вид
где m - масса элементарного объема пограничного слоя, R - радиус вращения и V - линейная скорость вращения элементарного объема.
Сила статического давления среды на наружную поверхность обращенного статора или на элементарный объем пограничного слоя определяется по формуле

где Po - абсолютное давление на границе двух сред (воды и воздуха), γh - избыточное (дефицитное) давление, h - глубина погружения (высота полета) аппарата, γ - удельный вес среды.
Приравняв выражения 6 и 7, получим формулу для нахождения необходимой скорости вращения магнитного поля в зависимости от горизонта движения
Встречный поток оказывает динамическое давление на поверхность статора (точнее его нормальная составляющая). Последняя связана с углом расхождения носовой части аппарата зависимостью
 ,
, 
где Pдин. - динамическое давление потока, Рн.д. - нормальная составляющая динамического потока, α - угол расхождения носовой части аппарата.
Общее давление среды на аппарат равно сумме нормальных составляющих статического и динамического

Приравняв выражения 6 и 9 и решая относительно V, получим зависимость для скорости вращения магнитного поля
 , где
, где 
Известно [1, c.11], что магнитное поле в расточке асинхронного статора может вращаться со скоростью от 1000 до 180000 об/мин. Частота питающего напряжения находится в диапазоне от 50 до 3000 Гц.
В случае самоходного подводного аппарата, СПА наибольшая скорость набегающего потока составляет 1800 м/мин. Линейная скорость вращения ротора асинхронного двигателя мощностью 1000 Вт, диаметра 0,2 м и скоростью 3000 об/мин составляет 1880 м/мин.
Для летательного аппарата, ЛА наибольшая скорость набегающего потока составляет 25800 м/мин. При среднем радиусе статора в 0,2 м поле должно совершать 20541 об/мин.
Приведенные данные показывают реальность выполнения данного предложения при использовании обычной технологии и материалов.
Таким образом, обращенный статор должен быть электрической машиной, аппаратом многофазным, высоковольтным, многополюсным, с повышенной частотой питания, с запасом по мощности и скорости вращения магнитного поля. При этом его внешний диаметр в большинстве случаях определяется внешним диаметром объекта использования статора, внутренний диаметр и длина по оси вращения определяются необходимой мощностью. Ширина зубцов доводится до минимума, а их длина по оси вращения определяется максимально возможной индукцией в зубце. Межполюсное расстояние доводится до возможного минимума.
Рассчитаем необходимую мощность обращенного статора для СПА и ЛА, используя формулы 3 и 4. Скорость вращения пограничного слоя должна во много раз превосходить скорость набегающего потока, точнее его составляющую, параллельную поверхности

где K1 - коэффициент превышения. При значительном K1 траектория движения элементарного объема пограничного слоя будет представлять спираль с малым шагом. Более точное значение скорости можно рассчитать по формуле 11.
Пусть обращенный статор имеет внешний диаметр 0,4 м, плотность воды 1000 кг/м3, скорость набегающего потока 30 м/с, значения K1: 1, 1,5 и 10, толщина пограничного слоя 0,01 м. Угол расхождения носовой части аппарата 90 град. и длина 0,64 м. При перечисленных значениях полезная мощность обращенного статора должна составлять соответственно: 1,8 кВт, 45 кВт и 180 кВт. При этом масса пограничного слоя составляет 8,2 кг.
Пусть обращенный статор для СПА имеет 40 пар полюсов, тогда в соответствии с формулой 5 обеспечить скорости вращения магнитного поля 21, 105 и 210 м/с можно, используя частоты питания: 669, 3339 и 6678 Гц.
Для ЛА оценим необходимую полезную мощность, принимая указанные диаметр, длину обращенного статора, угол расхождения носовой части ЛА, значения коэффициента К1. Плотность воздуха принимаем равной 1,226 кг/м3, а скорость набегающего потока 430 м/c. Macca пограничного слоя, рассчитанная по формуле 4, составляет 0,01 кг. Полезная мощность равна 0,5 кВт, 11,3 кВт и 45,3 кВт. Пусть статор имеет 40 пар полюсов, тогда для обеспечения скорости вращения магнитного поля в 301, 1505 и 3010 м/с необходимо иметь частоты питания в 9586, 47930 и 95860 Гц.
Заметим, что движение электрического заряда в магнитном поле определяется силой Лоренца 
где е - величина заряда,  - векторное произведение скорости, V движения заряда относительно создающих магнитное поле источников на напряженность магнитного поля, Н (5, с.407-409).
- векторное произведение скорости, V движения заряда относительно создающих магнитное поле источников на напряженность магнитного поля, Н (5, с.407-409).
Сила  направлена перпендикулярно векторам
направлена перпендикулярно векторам  и
и  (векторное произведение перпендикулярно направлениям обоих перемножаемых векторов). При этом сила Fm совпадает по направлению с
(векторное произведение перпендикулярно направлениям обоих перемножаемых векторов). При этом сила Fm совпадает по направлению с  для положительного заряда и направлена навстречу
для положительного заряда и направлена навстречу  для отрицательного заряда.
для отрицательного заряда.
Вследствие перпендикулярности к сила Fm только изменяет направление скорости , не изменяя ее величины, т.е. только искривляет траекторию заряда. В случае постоянства скорости и напряженности сила также постоянна и равна произведению 
Ускорение, сообщаемое заряду силой  , постоянно по величине и перпендикулярно траектории заряда, т.е. траектория является окружностью. При этом заряды, имеющие разные знаки, вращаются в противоположном направлении.
, постоянно по величине и перпендикулярно траектории заряда, т.е. траектория является окружностью. При этом заряды, имеющие разные знаки, вращаются в противоположном направлении.
В промежутке между магнитными полисами плоскость вращения зарядов перпендикулярна внешней поверхности зубцовой зоны и расположена поперек. Располагая над зубцовой зоной (с определенным зазором) механическую преграду (магнитный шунт-отражатель), можно использовать силу Лоренца, бомбардируя зарядами внутреннюю поверхность шунта, для получения силы упора. Таким образом, можно преобразовать электромагнитную энергию в механическую, не имея перемещающихся механических узлов и деталей. Меняя пространственное расположение щунта, можно изменять расположение магнитных силовых линий, находя их оптимальную ориентацию.
На практике магнитное поле неоднородно. Скорость неперпендикулярна  . При этом скорость можно разложить на две составляющие: Vn, лежащую в плоскости, перпендикулярной Н и Vt, направленную вдоль H. Вторая составляющая превращает движение по окружности в движение по спирали. Время обращения по спирали также не зависит от V, как и время обращения по окружности.
. При этом скорость можно разложить на две составляющие: Vn, лежащую в плоскости, перпендикулярной Н и Vt, направленную вдоль H. Вторая составляющая превращает движение по окружности в движение по спирали. Время обращения по спирали также не зависит от V, как и время обращения по окружности.
Представим магнитное поле, вращающееся над зубцовой зоной обращенного статора, в виде части сферы, в которой наибольшая напряженность имеет место в продольной плоскости, проходящей через середину зубцов и пазов. Рассмотрим упрощенные траектории выхода свободных зарядов из магнитного поля, в которое они попадают в результате вращения поля. Пусть заряды попадают только в пространство до наибольшей напряженности и они создаются разрядным устройством (его электродами), расположенным перед обращенным статором. Заряды будут выталкиваться силой Лоренца из магнитного поля на его внешнюю (ближайшую к разрядному устройству) поверхность по сложной, спиралевидной траектории. Для однородного поля при  ускорение, а и радиус вращения определяются по формулам:
ускорение, а и радиус вращения определяются по формулам:
 ,
,  , где m - масса заряда.
, где m - масса заряда.
В некоторых случаях (конструктивные особенности или ходовые и летные) нет необходимости иметь магнитное поле, вращающееся по окружности. Достаточно иметь поле, перемещающееся по замкнутой эллиптической кривой или подобной ей, по незамкнутой кривой, по прямой линии и т.п. В этом случае обращенный статор круговой превращается в некруговой или в развернутый нелинейный или в линейный.
«Разрезая» круговой обращенный статор по радиусу в районе паза, можно путем «развертывания» его в линейку (прямоугольный параллелепипед) или в иную фигуру получить непрерывное движение магнитного поля в одну сторону, например, слева направо. Располагая такую линейку (фигуру) на корпусе объекта (аппарата) и ориентируя ее по-разному относительно оси симметрии, можно получить необ- ходимый эффект снижения лобового сопротивления.
Алюминиевый стакан вращается в расточке статора, так как его материал обладает электронной проводимостью и сцеплен с магнитным потоком. Наличие указанных условий является обязательным. Существование в материале (пограничном слое) свободных зарядов разного знака и в равном количестве обусловит появление вихревых токов противоположного направления и соответствующих вращающих моментов.
Отсутствие потокосцепления у пограничного слоя также обусловит нулевой вращающий момент.
При наличии результирующего вращающего момента пограничный слой, прошедший обращенный статор по структуре (поле скоростей), будет подобен пограничному слою, образованному на корпусе корабля или ЛА. Его средняя скорость будет обусловлена средней скоростью вращения магнитного поля и скоростью перемещения объекта (сложение двух векторов). Пульсационная составляющая (наличие турбулентности) определяется неравномерностью магнитного поля и неоднородностью пограничного слоя.
Рассмотрим пригодность обращенного статора для работы в различных средах. Металлы обладают электронной проводимостью. Свободные электроны, имеющие минусовой заряд, обуславливают появление результирующего вращающего момента. Жидкости и газы обладают ионной проводимостью. В них имеются как частицы, заряженные плюсом, так и минусом. При их равном количестве результирующий момент равен нулю (нет вращения).
В обычных (естественных) условиях жидкости и газы электрически нейтральны. Однако существуют обстоятельства (условия), при которых они теряют нейтральность и становятся полярными. При этом разность потенциалов может достигать очень большой величины (разряд между облаками или между облаком и землей). Указанное обуславливает необходимость наличия на корпусе объекта перед обращенным статором участкам для интенсивной электризации пограничного слоя. Во избежание разряда как участок, так и поверхность статора должны быть покрыты электроизолирующим слоем. Длина участка определяется необходимой степенью электризации.
Назовем первый участок траектории относительного движения пограничного слоя участком поляризации. Второй участок вниз по потоку назовем участком раскручивания. На этом участке находится обращенный статор. Третий участок, создающий наибольшее сопротивление, назовем участком сопротивления. Благодаря работе обращенного статора, пограничный слой на третьем участке должен иметь дефицит плотности. На четвертом участке плотность пограничного слоя восстанавливается из-за действия сил Архимеда на раскрученные массы. Этот участок назовем участком коллапса.
В создании вихревых токов и соответствующих моментов участвуют заряженные частицы, обладающие массой (в том числе и присоединенной). Уточним характер взаимодействия вихревых токов разного (противоположного) направления, их магнитных полей с основным вращающимся магнитным полем. Воздух является парамагнетиком (относительная магнитная проницаемость больше 1) и при воздействии внешнего магнитного поля создается преимущественное направление в расположении элементарных магнитных моментов, воздух оказывается намагниченным. Степень намагниченности незначительна.
Роль орбитальных моментов мала в намагничивании. Основными элементарными носителями магнетизма являются спиновые моменты, образующиеся в результате вращения электрона вокруг своей оси. Однако их может оказаться недостаточным и необходима дополнительная операция над пограничным слоем. С целью выбивания электронов с высоких уровней в атомной структуре возможна ударная ионизация с помощью искрового разряда. В воздухе образуются электронные лавины, приводящие к образованию каналов повышенной электропроводности. Скорость распространения электронной лавины меньше, чем скорость образования электропроводящего канала. Последнее обусловлено фотонной ионизацией воздуха [6, с.372-377 и 5, с.213].
Система искровых разрядников размещается на корпусе ЛА на первом участке, перед обращенным статором, равномерно по окружности. Подача высокого напряжения на электроды может быть синхронизирована с перемещением магнитного поля. При этом очередной разряд должен происходить с опережением, величина которого определяется временем ионизации промежутка электрод - обращенный статор. Отметим, что использование ударной ионизации является мерой, дополняющей электризацию пограничного слоя от трения. При сравнительно малой скорости перемещения ЛА, при коротком первом участке такая мера может оказаться основной.
В случае СПА ионный разбаланс в воде можно осуществить следующим образом. Во-первых, впрыскиванием в пограничный слой раствора вещества, имеющего необходимые ионы и обладающего повышенной электропроводностью. В качестве такого может быть щелочной электролит с удельной электропроводностью 6 См/м. Такие ионы можно отбирать из раствора, в котором происходит электролиз. Источником отрицательно заряженных ионов является пространство, окружающее анод. Источником положительно заряженных ионов является пространство, окружающее катод. Отбирая часть ионов одного знака полярности и впрыскивая их под давлением в пограничный слой, можно осуществить электризацию. Способ громоздкий, дорогой и тяжело управляемый. Его также можно использовать и для ЛА.
Оптимальным способом электризации пограничного слоя является самостоятельный разряд (искровой разряд для воздуха). Разряд должен проходить в поперечном направлении (относительно перемещения пограничного слоя, ПС) и близко к обращенному статору, ОС. Во избежание короткого замыкания электрической схемы в начале разряда схема автоматом защиты должна отключаться от электродов разрядника. Самостоятельный разряд может иметь разрушительные последствия, что при реализации способа заставит перейти к несамостоятельному. При этом последним легче управлять. Таким образом, и для СПА разряд является способом электризации ПС.
Электропроводность воды (особенно соленой и теплой) значительно превышает электропроводность воздуха. Последнее позволяет в случае СПА значительно увеличить расстояние между электродами и уменьшить напряжение на них.
В случае ЛА уместно вспомнить закон Столетова: наибольший ток для газа наблюдается при одном и том же отношении напряженности поля (электрического) к давлению [6, с.211]. При изменении высоты ЛА необходимо изменить и напряжение на электродах. В противном случав несамостоятельный (тихий) разряд может превратиться в самостоятельный (разрушительный).
В случае водной среды (СПА) с увеличением давления (глубины погружения) электропроводность уменьшается для глубин ниже скачка плотности (температуры). При маневрировании СПА в этом диапазоне глубин можно ориентироваться на закон Столетова. Однако выше скачка плотности закономерность обратная, так как здесь электропроводность в основном определяется увеличением температуры при погружении (антарктическая водная структура). В умеренных широтах температура с глубиной понижается, уменьшается электропроводность и можно более уверенно ориентироваться на закон Столетова. Иными словами, вертикальный разрез электропроводности (температуры) является критерием для определения величины напряжения на электродах разрядного устройства.
При быстром движении СПА на его корпусе возможна кавитация, образование областей с дефицитом давления с избытком свободных ионов и с увеличением электропроводности [6, с.517]. Первый участок там, где расположена разрядное устройство, а также пространство обращенного статора может быть местом кавитации, усиливающейся последующим кольцом второго разрядного устройства и обращенного статора (двухступенчатая «раскрутка» пограничного слоя). В начальный период такая система работает в водной среде (этап разгона). Последующий этап работы происходит в водно-газовой среде. При торможении работа происходит в водной среде. С увеличением глубины (статического давления) кавитационная составляющая должна уменьшаться.
Система может быть многоступенчатой, т.е. состоять из значительного количества пар. Каждая пара включает разрядное устройство и статор. При этом статор может быть как кольцевым (обращенным), так и некольцевым и даже развернутым в линейку. Последнее определяется конструкцией объекта (носителя). Общей конструктивной особенностью таких объектов является существенное различие площади поперечных сечений. Это обуславливает и различие диаметров (радиусов) обращенных статоров из разных пар и еще большее различие их энергетических характеристик.
Электромагнитный движитель, состоящий из нескольких пар разрядных устройств и обращенных статоров, должен удовлетворять следующим требованиям.
1. Каждая пара может иметь магнитный шунт-отражатель, нависающий над обращенным статором, ОС и разрядным устройством, РУ.
2. Угол наклона отражательной поверхности шунта предыдущей пары должен учитывать угол расхождения корпуса носителя. При этом отраженный поток свободных зарядов и присоединенной массы не должен тормозиться последующей парой. Для усиления действия суммарной силы упора характеристики (конструктивные и энергетические) двух смежных пар должны быть согласованы.
3. Величина зазора между шунтом и РУ и ОС последующей пары должна быть больше зазора предыдущей пары.
4. Степень нависания шунта над РУ у последующей пары должна быть меньше нависания предыдущей пары. Указанное обуславливается увеличением скорости пограничного слоя.
5. Число пар полюсов ОС последующей пары должно быть больше числа пар полюсов ОС предыдущей пары. Последнее определяется увеличением диаметра ОС.
6. Частота напряжения электропитания ОС и РУ последующей пары должна быть больше частоты питания ОС и РУ предыдущей пары. Указанное обуславливается снижением скорости перемещения магнитного поля ОС из-за увеличения числа пар полюсов.
7. Скорость вращения (перемещения) магнитного поля ОС последующей пары должна быть больше скорости вращения магнитного поля ОС предыдущей пары.
8. Мощность источника электропитания последующей пары должна быть больше мощности источника питания предыдущей пары.
9. Мощность ОС и РУ последующей пары должна быть больше мощности ОС и РУ предыдущей пары.
10. Общая потребляемая мощность движителя равна сумме мощностей всех пар РУ и ОС плюс мощность вспомогательных систем.
11. С целью компенсации силовой асимметрии количество пар ОС и РУ должно быть четным.
12. Увеличение силы упора (тяги) осуществляется последовательным включением количества пар. Минимальный упор (тяга) обеспечивается включением одной (первой, наименее мощной) пары. Наибольший упор (тяга) обеспечивается включением (постепенным) всех пар ОС и РУ.
13. Промежуточное значение силы упора обеспечивается включением одной или нескольких пар.
14. Закономерности изменения конструкции и мощности РУ в случав синхронизации работы ОС и РУ аналогичны перечисленным.
15. Промежутки между парами при увеличении их мощности (порядкового номера) должны увеличиваться. Последнее должно обеспечить увеличение массы пограничного слоя.
16. Количество пар ОС и РУ определяется необходимой мощностью движителя, диапазоном изменения скоростей и дискретностью их.
Целью изобретения является создание простого и надежного средства передвижения, способного перемещаться в различных средах (в воде, в воздухе и в безвоздушном пространстве). Цель достигается размещением на осесимметричном объекте шести комплектов электромагнитных движителей и определенным порядком управления ими.
Сущность изобретения заключается в следующем. С помощью специальной электрической машины преобразованного (обращенного или развернутого) статора создается вращающееся (перемещающееся) магнитное поле, выходящее на его внешнюю поверхность. Перед статором размещается разрядное устройство, электроды которого имеют контакт с пограничным слоем среды. Электрические разряды, пронизывающие пограничный слой, насыщают его свободными зарядами. Над ОС и РУ нависает магнитный шунт-отражатель. Свободные заряды, попадая в магнитное поле, выталкиваются силами Лоренца, отражаются от шунта и создают силу упора.
Работа ОС и РУ должна быть синхронной (выше КПД). Электрическое поле РУ должно синхронно с магнитным полем ОС перемещаться в пространстве. Конструкция РУ должна повторять конструкцию ОС, т.е. напротив зубцов ОС, охватывающих межполюсное расстояние, должны располагаться электроды разрядного промежутка. Система электродов, подключенных к одной фазе питания, должна размещаться в одной плоскости, поперек движению потока. В другой плоскости размещаются электроды другой фазы. Между плоскостями должен быть изоляционный промежуток, предотвращающий паразитный разряд. Движение ЛА и СПА возможно с переменной скоростью и изменяемым горизонтом. Последнее обуславливает изменение нормальной составляющей общего давления на поверхность аппарата (см. ф.10) и пограничный слой. Изменяется сила трения между движущимися частями пограничного слоя, ПС.
С целью компенсации существенного изменения сил трения необходимо изменить скорость вращения магнитного поля. При уменьшении силы трения целесообразно уменьшить ее и тем самым сэкономить энергию. Возможность гибко изменять скорость вращения магнитного поля, МП в зависимости от параметров перемещения аппарата является необходимым условием оптимальной работы. Рассмотренное обуславливает возможность использования в качестве ОС асинхронного двухфазного (двухобмоточного) управляемого статора, несмотря на его недостатки.
Перечислим необходимые действия для снижения лобового сопротивления объекта при движении на одном горизонте.
1. Расположение перед участком поверхности, создающего наибольшее сопротивление, ОС.
2. Расположение перед ОС разрядного устройства, РУ.
3. При помощи ОС создание магнитного поля, вращающегося вокруг оси симметрии (продольной оси) указанного участка.
4. Раскручивание магнитного поля до необходимой скорости.
5. Усиление магнитного поля до необходимой напряженности.
6. Расположение перед ОС разрядного устройства.
7. Ориентация РУ относительно оси вращения магнитного поля (совмещение их осей).
8. Установка между ОС и РУ необходимого зазора.
9. Ориентация РУ относительно ОС (совмещение зубцов и электродов).
10. Синхронизация работы ОС с работой РУ.
11. Установка необходимой мощности разряда.
12. Установка необходимой длительности разряда (п. может отсутствовать).
13. При необходимости установка второго комплекта ОС и РУ, при этом их поля могут перемещаться в направлении, обратном направлению первого комплекта.
14. Установка третьего комплекта ОС и РУ, при этом его поля могут перемещаться в направлении, совпадающем с направлением первого комплекта.
15. Установка четвертого комплекта ОС и РУ с направлением перемещения полей, обратным третьему комплекту и т.д.
Количество комплектов ОС и РУ определяется продольной протяженностью участка поверхности, создающего наибольшее сопротивление.
Рассмотрим более подробно действия, лежащие в основе работы РУ. С целью повышения КПД работа РУ и ОС должна быть синхронизирована, т.е. они должны запитываться от одного источника переменного напряжения. В основе необходимости синхронизации лежит принцип: нет магнитного поля, не нужны свободные электроны в ПС. При максимальном магнитном поле должно быть наибольшее количество свободных электронов в ПС. Между напряженностью магнитного поля и количеством электронов должна существовать прямо пропорциональная зависимость.
В соответствии с действием силы Лоренца заряды, попавшие и образованные в ПС, проходя магнитное поле, будут вращаться по спирали и подниматься (отклоняться) от поверхности ЛА (СПА). При этом у электронов и положительно заряженных ионов вращение происходит в противоположных направлениях. По мере выхода из магнитного поля (отклонения от поверхности) радиус вращения зарядов увеличивается (магнитное поле слабеет). Ось спирали направлена в сторону вращения магнитного поля. Легкие электроны быстрее увлекаются полем и выходят на его периферию. Тяжелые ионы (протоны) отстают от электронов. Однако после разгона они дольше следуют за полем и их периферийное положение более удалено от оси вращения (центрифугирование зарядов).
Перечень действий, снижающих лобовое сопротивление СПА, идущего на одной глубине при постоянной скорости, аналогичен рассмотренному.
Роль присоединенной массы в рассмотренном движении зарядов возрастает, так как увеличиваются межмолекулярные силы притяжения.
Движение ЛА и СПА с увеличивающейся скоростью сопровождается увеличением количества зарядов, оказывающихся в промежутке между РУ и ОС. Последнее обуславливает некоторое торможение аппарата ПС. Уменьшить его можно путем увеличения скорости вращения магнитного поля. Здесь уместна грубая аналогия с работой бульдозера: его рабочий орган-щит должен располагаться под острым углом к линии движения. Увеличение окружной составляющей в магнитном поле позволит увеличить количество зарядов, размещенных перед фронтом вращающегося магнитного поля и вовлечь их во вращательное движение.
Изменение скорости вращения магнитного поля асинхронного статора возможно путем изменения частоты питающего напряжения (см. ф.5). Однако такое изменение возможно в узком диапазоне частот (препятствуют распределенные параметры электромагнитной системы, снижающие мощность). Возможно изменять скорость вращения путем изменения числа пар полюсов (см. ф.5). Иметь несколько фиксированных скоростей или расширенный диапазон скоростей можно, применяя многообмоточную систему и изменяемую частоту питания. Такое исполнение заставляет применять сложный переключатель обмоток и сложный источник питания. При этом оптимальный режим работы ОС будет на одной скорости или в узком диапазоне изменения скоростей.
Использование двухобмоточного управляемого ОС сопровождается резким падением КПД (полезной мощности) и значительным увеличением степени эллиптичности магнитного поля. Однако здесь возможно плавное изменение скорости в большом диапазоне. При этом отработаны схемы включения ОС в системы автоматического регулированиям. Учитывая изложенное, принцип двухобмоточного управления можно использовать в качестве второго способа уменьшения лобового сопротивления.
Способ состоит из следующих действий. П.п.1-15 аналогичны первому способу.
16. При амплитудном режиме управления обмотку возбуждения, ОВ подключают к однофазной сети питания повышенного напряжения и частоты. Обмотку управления, ОУ подключают к выходу регулятора уровня напряжения, на вход которого подается указанное напряжение сети, сдвинутое на 90 градусов (сдвиг по времени).
17. Регулировку уровня напряжения (скорости вращения магнитного поля) осуществляют, используя сигнал от датчика давления.
При этом чем выше сигнал датчика, тем больше напряжение на обмотке управления (выше скорость поля). В качестве регулятора возможно использование четырехполюсника с регулируемым внутренним сопротивлением.
18. При фазовом режиме управления обмотку возбуждения ОС подключают к однофазной сети повышенного напряжения и частоты. Обмотку управления подключают к выходу фазосдвигающего устройства, имеющего регулируемый сдвиг по фазе. На обмотку управления подают постоянное по амплитуде напряжение, приведенное значение которого равно напряжению возбуждения.
19. Регулировку фазового сдвига (скорости вращения магнитного поля) осуществляют, используя сигнал от датчика давлениям. При этом, имея сдвиг по фазе 90 градусов, получаем круговое поле и наибольшую скорость.
20. При амплитудно-фазовом режиме управления обмотку возбуждения через фазосдвигающую емкость подключают к однофазной сети с повышенным напряжением и частотой. Обмотку управления подключают к выходу регулятора уровня напряжения, зачитываемого от указанной сети [2, с.128-130].
Примечание. Во всех режимах РУ запитывается аналогично ОС. Система электродов, обслуживающих пространство ОВ, лежит в одной плоскости и запитывается аналогично ОВ. Система электродов, обслуживающих пространство ОУ, лежит в другой плоскости, параллельной первой, и запитывается аналогично ОУ. Плоскости расположены перпендикулярно оси движения аппарата. Сила разрядного тока ограничивается баластными сопротивлениями.
Сущность изобретения, соответствующая п.п. формулы, следующая.
1. Способ для перемещения в пространстве состоит из действий:
а) создание конструкции корпуса объекта-носителя, ОН, симметричной относительно трех взаимно перпендикулярных осей, пересекающихся в одной точке;
б) придание ОН наибольшей устойчивости и наименьшего лобового сопротивления при движении в среде с устойчивой плотностной стратификацией за счет превышения горизонтальных размеров ОН над вертикальными;
в) придание ОН обтекаемой формы при его движении во всех направлениях;
г) размещение оборудования и приборов ОН так, чтобы в условиях невесомости центр массы ОН совпадал с центром симметрии;
д) размещение оборудования и приборов ОН так, чтобы в условиях гравитации центр тяжести ОН совпадал с центром симметрии;
е) размещение на корпусе ОН шести систем полей, перемещающихся вокруг осей симметрии;
ж) вывод полей на внешнюю поверхность ОН так, чтобы поля пронизывали пограничный слой среды на и перед участком, создающим наибольшее сопротивление;
з) включение в каждую систему двух пар полей, перемещающихся в противоположных направлениях;
и) составление каждой пары из электрического и магнитного поля;
к) перемещение полей пары синхронно в одном направлении;
л) размещение электрического поля перед магнитным так, чтобы магнитное было ближе к центру;
м) создание в полях, в пограничном слое необходимой напряженности;
н) разгон полей до необходимой скорости;
о) создание несамостоятельного разряда в электрическом поле необходимой мощности, способного расчленить атомы пограничного слоя на свободные заряды;
п) выталкивание свободных зарядов и присоединенной массы из пограничного слоя магнитным полем, создание дефицита плотности среды у внешней поверхности ОН и вектора тяги или упора, направленного от центра симметрии к области дефиита;
р) перемещение электрического разряда, максимума магнитного поля, области дефицита плотности и конца вектора тяги вокруг оси симметрии ОН;
с) смежное размещение второй пары аналогичных полей вокруг оси симметрии;
т) придание этой паре противоположного направления перемещения;
у) создание у полей необходимой мощности разряда, скорости перемещения и напряженности магнитного поля для получения нулевого момента вращения двух пар полей.
В условиях, близких к невесомости, должны быть следующие действия:
а) при движении по одной из осей создают систему полей, ближайшую к цели движения, БСП и окружающую ось движения;
б) при торможении выключают БСП и, при необходимости, создают дальнюю систему полей, ДСП, окружающую ось движения;
в) при вращении вокруг оси в БСП и в ДСП включают по одной паре, вращающиеся в направлении, противоположном необходимому, а при торможении вращения указанные пары отключают и, при необходимости, их реверсируют;
г) для движения по прямой, лежащей симметрично в плоскости двух осей, создают две БСП, обладающие одинаковой тягой;
д) для торможения выключают БСП и, при необходимости, включают две ДСП;
е) для вращения вокруг симметричной прямой в БСП и в ДСП включают по одной паре полей с вращением, противоположным необходимому, при торможении поля отключают или реверсируют;
ж) для движения по прямой, лежащей несимметрично в плоскости двух осей, создают две БСП с неравными тягами, при этом БСП, ближайшая к прямой, должна иметь большую тягу, для торможения БСП отключают и, при необходимости, включают два ДСП с указанной асимметрией тяг;
з) для вращения вокруг прямой, лежащей асимметрично в плоскости двух осей, в БСП и в ДСП включают по одной паре полей, имеющих вращение, противоположное необходимому, и асимметрию моментов вращения (пары, лежащие ближе к прямой, должны иметь больший момент), для торможения вращения пары выключают и, при необходимости, реверсируют;
и) для движения по прямой, не лежащей в плоскости двух осей, создают три БСП, при этом равенство их тяг обеспечивает движение по симметричной относительно осей траектории, а неравенство смещает траекторию к оси, где БСП имеет большую тягу;
к) для торможения движения по симметричной прямой выключают три БСП и, при необходимости, создают три ДСП, имеющие равные тяги;
л) для торможения движения по прямой также выключают три БСП и включают три ДСП, при этом ближняя к прямой ДСП должна иметь большую тягу;
м) для вращения вокруг симметричной прямой включают в БСП и в ДСП (в 6 системах) по одной паре полей с двух сторон от центра, при этом поля должны перемещаться в одном направлении (противоположном необходимому) и иметь равные моменты вращения;
н) для вращения вокруг асимметричной прямой поля должны иметь неравные моменты;
о) для одновременного движения по оси и вращения вокруг нее создают БСП и в ДСП включают пару, вращающуюся в противоположном направлении;
п) для поступательного движения по прямой, симметрично расположенной относительно осей ОН, и одновременного вращения вокруг прямой включают три БСП и в трех ДСП по одной паре полей, имеющих обратное вращение.
Для перемещения ОН в условиях гравитации с целью уравновешивания силы притяжения создают верхнюю систему полей вокруг вертикальной оси над центром тяжести объекта с использованием перечисленных действий.
Таким образом, имеем сравнительно сложный процесс коммутации электромагнитных полей. Однако он компенсируется динамическими свойствами ОН, позволяющими из одной точки пространства перемещаться во всех направлениях, быстро изменять как величину, так и знак скорости и ускорения. Процесс коммутации упрощается переносом его в маломощные звенья передаточной цепи схемы питания. Ограничения по быстродействию в основном определяются массой ОН.
Для увеличения скорости перемещения объекта увеличивают в системах количество пар полей, т.е. вместо двух их делают равным 4, 6, 8 и т.д. (четным). При этом у каждой последующей пары увеличивают мощность, вращающий момент и промежуток между парами, располагая их вокруг одной оси, ближе к центру ОН, и повышая порядковый номер.
Для увеличения скорости перемещения ОН дополнительные пары полей перемещаются по большему радиусу в соответствии с увеличением радиуса корпуса ОН.
Для увеличения скорости перемещения ОН увеличивают фазные напряжения движителей: напряжения обращенного статора, ОС и разрядного устройства, РУ или напряжение одного из них путем увеличения передаточного коэффициента усилителя мощности, УМ или усилителя напряжения, УН.
Для уравновешивания выталкивающей силы, действующей на ОН со стороны среды, дозированно забирают в ОН часть массы среды. При этом в режиме свободного падения ОН, измеряя скорость падения, уточняют величину ускорения и вес ОН, а также измеряют плотность среды. На основании закона Архимеда вычисляют необходимый для уравновешивания объем среды.
Для компенсации изменения силы трения корпуса ОН, обусловленного изменением статического давления среды (изменение горизонта движения ОН, измеряют нормальную составляющую статического давления среды на внешнюю поверхность корпуса. Также измеряют скорость движения ОН и величину фазного напряжения обмотки возбуждения ОС. Сравнивают измеренные значения с необходимыми для получения номинального упора или тяги (скорости перемещения). Выявляют несоответствие и изменяют величину фазного напряжения ОС до получения необходимой скорости перемещения ОН. Необходимые значения давления, скорости и фазного напряжения измеряют при испытаниях ОН (ходовые и метрологические).
Для компенсации изменения электропроводности среды, обусловленного в основном изменениями температуры и солености, измеряют электропроводность, скорость перемещения ОН и величину напряжения на электродах РУ. Сравнивают измеренные значения с необходимыми для получения номинального упора или тяги (скорости перемещения ОН). Выявляют несоответствие и изменяют напряжение на электродах РУ до получения необходимой скорости перемещения ОН.
Для компенсации дефицита электропроводящей массы в пограничном слое среды измеряют скорость перемещения ОН, фазное напряжение на обмотке возбуждения ОС и на электродах РУ, электропроводность среды, а также нормальную составляющую статического давления среды на корпус ОН и плотность среды. Сравнивают измеренные значения с необходимыми для получения номинального упора или тяги. Выявляют несоответствие и дозированно впрыскивают электропроводящую массу в пограничный слой среды перед полями РУ. Внесение или впрыскивание может производиться в самом РУ. Дозирование массы может происходить как по времени, так и по ее количеству. При наличии напряжений, давления, низкой электропроводности и отсутствии разряда кратковременное внесение массы может оказаться достаточным для начала (поджига) разряда. При этом внесение может быть повторно-кратковременным. При высокой электропроводности, скорости ОН, наличии разряда и напряжений необходимость работы РУ может оказаться излишней (в среде достаточно свободных зарядов). Выключение РУ поможет сэкономить электроэнергию. Измерение и анализ величины электропроводности дают возможность определить недостаток или избыток свободных зарядов.
Для изменения скорости перемещения ОН изменяют частоту электропитания ОС и РУ. При этом изменения могут производиться в ограниченном диапазоне для технологических (подстрочных) целей, например, для избежания резонансных явлений, оптимизации характеристик и т.п. Диапазон может быть расширен при наличии магнитных и электротехнических материалов, обладающих повышенными свойствами.
Для увеличения силы тяги или упора устанавливают над поверхностью ОС магнитный шунт, уменьшая сопротивление магнитному потоку и изменяя траекторию его распространения. При этом шунт может частично нависать и над поверхностью РУ. Придают шунту обтекаемую форму и создают у него отражательную поверхность, обращенную под углом к наружной поверхности ОС. При этом изменяют направление распространения зарядов и массы среды и направление упора, превращая шунт в отражатель, ШО.
Устройство для перемещения в пространстве включает герметичный, легкий и прочный корпус и содержит:
а) корпус, симметричный относительно трех взаимно перпендикулярных осей, пересекающихся в одной точке, имеющий горизонтальные размеры, превышающие вертикальные и обтекаемые формы для всех направлений;
б) внутреннее оборудование, имеющее центр тяжести и центр масс, расположенные в точке пересечения осей в условиях, близких к невесомости;
в) шесть систем электромагнитных движителей, вмонтированных в корпус, при этом каждая система охватывает ось с одной стороны от центра;
г) в каждой системе два движителя, поля которых перемещаются в противоположных направлениях;
д) в каждом движителе РУ и ОС, у которых электродная и зубцовая зоны охватывают ось, выходят на поверхность корпуса ОН, имеют промежутки, внешнее защитное покрытие и синхронное, согласное перемещение полей, при этом ОС размещается ближе к центру, РУ и ОС соосны, примыкают друг к другу, имеют внутреннее экранирующее покрытие, а их зоны перпендикулярны оси;
е) в каждом ОС многофазную обмотку возбуждения, каждая фаза которой подключена к выходу своего усилителя мощности, УМ;
ж) в каждом РУ многофазную систему электродов, каждая система которого имеет автомат защиты и подключена к выходу своего УМ;
з) шесть систем усилителей мощности, вход которых через переключатели подключаются к соответствующему выходу вторичного источника питания, ВИП;
и) в каждой системе УМ 8×П усилителей, где П - количество фаз, при этом ОС и РУ имеют равное количество фаз и каждая фаза подключена к одному и тому же выходу ВИП;
к) ВИП, содержащий задающий генератор, ЗГ, фазосдвигающие устройства, ФСУ и усилители напряжения, УН, при этом входы ФСУ подключены к выходу ЗГ, а выходы ФСУ - к входам УМ, а их выходы являются выходами ВИП;
л) первичный источник питания, ПИП, включающий аккумуляторные батареи, АБ и солнечные батареи, СБ, размещенные на внешней поверхности ОН, при этом ПИП подключен к цепи питания ВИП;
м) общий переключатель, ОП, включающий переключатель систем движителей, ПСД и переключатель движителей, ПД.
Каждая система движителей содержит несколько пар движителей и соответствующее количество УМ, AЗ и при необходимости ВИП. При этом движители соосны, их зоны выходят на внешнюю поверхность ОН и, по мере приближения к его центру, увеличения полноты корпуса, увеличиваются мощности движителей, вращающие моменты и промежутки между ними.
Каждая система движителей, по мере ее увеличения, приближения к центру ОН содержит РУ и ОС, имеющие более длинные и узкие зоны электродов и зубцов, а также большее количество пар полюсов.
УМ или УН имеют регулируемую отрицательную обратную связь, позволяющую изменять их коэффициент передачи по напряжению, т.е. фазные напряжения ОС и РУ или величину тяги и момента движителя. Регулирование может быть ручным с пульта оператора или автоматическим, а связь в виде изменяемого сопротивления, соединяющего вход УМ или УН с их выходом.
Устройство содержит балластную систему приема забортной массы среды и измерители скорости движения ОН и плотности среды. Система состоит из емкости, источника сжатого воздуха, двух трубопроводов и двух управляемых вентилей - клапанов, вмонтированных в трубопроводы. Емкость соединена со средой и с источником трубопроводами. Датчик измерителя плотности расположен на поверхности ОН.
Для компенсации изменения силы трения корпуса ОН, обусловленного изменением статического давления среды при изменении горизонта перемещения, каждая система движителей содержит измерители скорости перемещения ОН, нормальной составляющей статического давления среды на корпус ОН и фазного напряжения ОС. Измеритель давления состоит из датчика, блока преобразования и регистратора. Датчик размещен в нише, на внешней поверхности ОН. Регистратор на пульте управления оператора. Части измерителя соединены кабелями. Возможно применение одного измерителя давления на все системы движителей. Функциональное расчленение и электрическое соединение измерителей скорости и напряжение аналогично. Датчик измерителя скорости смонтирован на поверхности ОН, на оси и вынесен из пограничного слоя. У измерителя напряжения в общую часть кабеля, соединяющего блок преобразования с обмотками возбуждения ОС, включен ПД. Каждый УМ или УН имеет регулируемую отрицательную обратную связь при ручном или автоматическом управлении. При ручном регулировании рабочие органы смонтированы на пульте оператора и соединены кабелем с УМ. При автоматическом управлении устройство содержит систему или системы автоматического управления, использующую статическое или астатическое регулирование по типовой схеме.
Для компенсации изменения электропроводности среды устройство содержит измерители электропроводности, скорости перемещения ОН и фазного напряжения РУ в каждой системе движителей. При этом измеритель электропроводности и измеритель фазного напряжения РУ могут использоваться для всех систем движителей. Каждый измеритель состоит из датчика, блока преобразования и регистратора. В измерителе напряжения датчик отсутствует. Части измерителей соединены кабелями. Регистраторы размещены на пульте управления. Датчик скорости размещен на оси ОН, на его поверхности и выдвинут из пограничного слоя среды. Датчик электропроводности смонтирован в нише на поверхности ОН. В разрыв кабеля, отходящего от датчика скорости, включен ПСД. В разрыв кабеля, отходящего от блока преобразования к РУ, включен ПД. УМ или УН каналов РУ имеют регулируемую отрицательную обратную связь с выводом органа управления на пульт оператора. Управление может быть ручным или автоматическим.
Устройство содержит систему хранения электропроводящей массы и сжатого воздуха, смешения их и впрыскивания смеси на поверхности ОН перед или в РУ. Система содержит источники массы и воздуха, трубопроводы, смеситель, три вентиля-клапана и систему форсунок - калиброванных отверстий, равномерно распределенных в зоне электродов РУ. Входы смесителя соединены с источниками трубопроводами с вентилями. Выход смесителя соединен с форсунками параллельными трубопроводами, в общую часть которых включен вентиль. Управляемые вентили имеют механизм или схему синхронизации и изменения длительности их работы. ОН содержит комплект измерителей: скорости ОН, напряжений РУ и ОС, электропроводности, плотности и нормальной составляющей статического давления среды. Измерители имеют состав, размещение и схему соединения аналогичный рассмотренным.
Для изменения скорости перемещения ОН устройство содержит в ВИЛ ЗГ с разной частотой генерируемого ими сигнала, напряжения. При этом частота может изменяться плавно или ступенчато в диапазоне, определяемом из условий эксплуатации ОН. Изменение частоты может производиться вручную или автоматически.
Для увеличения тяги движитель устройства содержит магнитный шунт-отражатель. ШО имеет обтекаемую форму, скошенную внутреннюю поверхность и зазор. ШО охватывает ОС и может частично нависать над РУ. Его внутренняя поверхность имеет профиль, направляющий поток зарядов и массы в зазор следующего движителя. При этом поток последнего движителя направляется под острым углом к поверхности ОН. ШО крепится к ОС кронштейнами, выполненными из немагнитного материала.
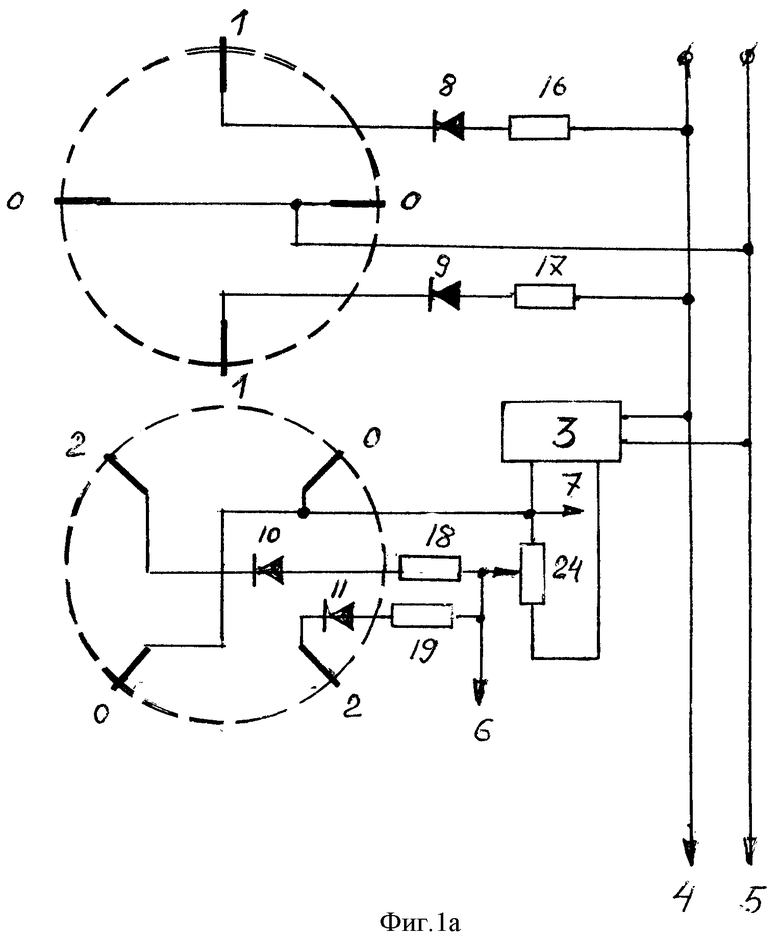
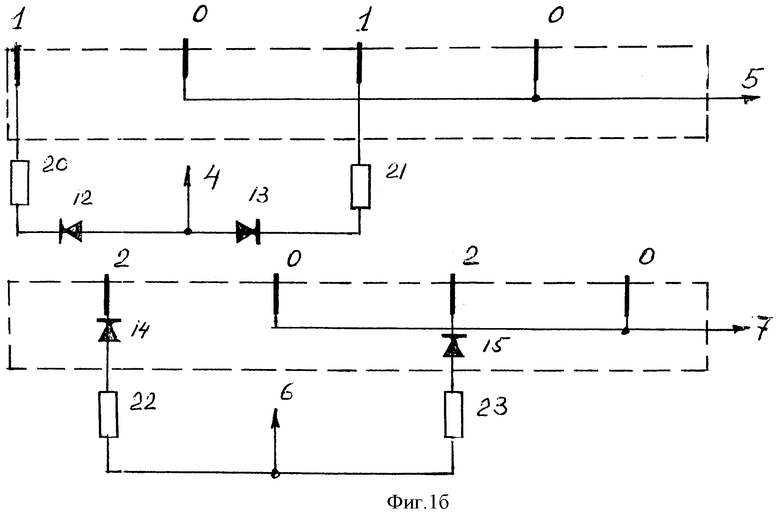
На фиг.1a упрощенно представлена схема РУ для кругового ОС, использующего амплитудный режим управления. ОС имеет 4 пары полюсов и 2 паза на полюс и фазу. Обращение к управляемому ОС обусловлено простотой изложения принципа работы. На практике предпочтение имеет неуправляемый многофазный асинхронный ОС. В РУ контакты имеют обозначения: 1, 2 и 0. ФСУ (3) содержит конденсатор, включенный последовательно в цепь питания регулятора, 24. Последним может быть УМ, на вход которого подается напряжение от ФСУ, а с выхода оно снимается для питания РУ. УМ имеет регулируемую отрицательную обратную связь. На схеме диоды имеют цифры 8-15, а сопротивления - цифры 16-23.
На фиг.1б упрощенно представлена схема РУ для развернутого ОС, работающего в аналогичном режиме. Сравнивая схемы, можно заключить, что у развернутого РУ КПД меньше и большая неравномерность загрузки электродов-контактов.
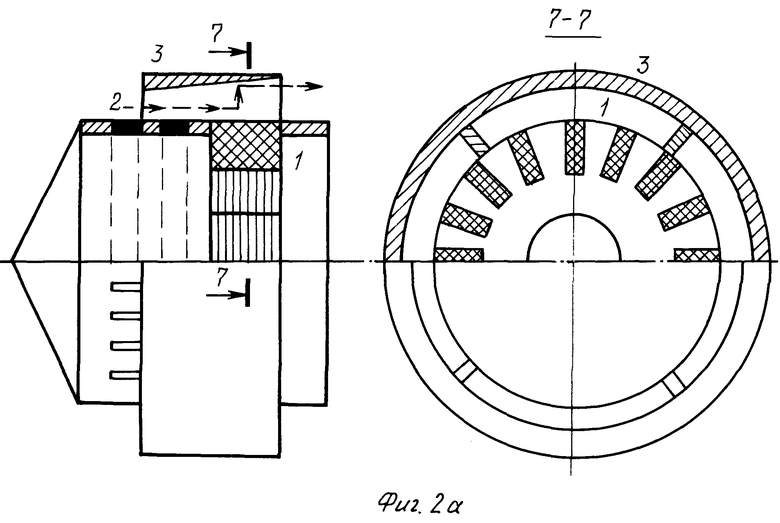
На фиг.2а представлена упрощенная конструкция кругового ОС (1), РУ (2) и ШО (3).
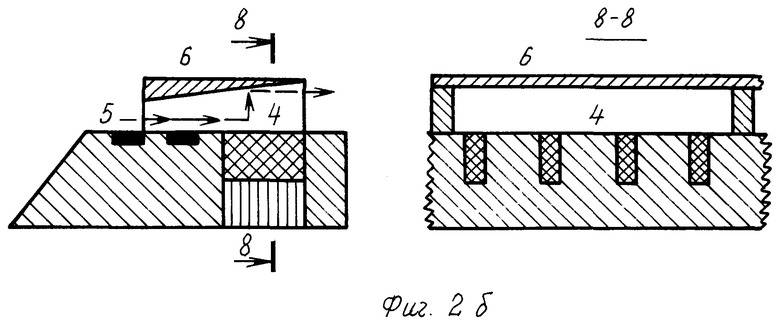
На фиг.2б представлена упрощенная конструкция развернутого ОС (4), РУ (5) и ШО (6).
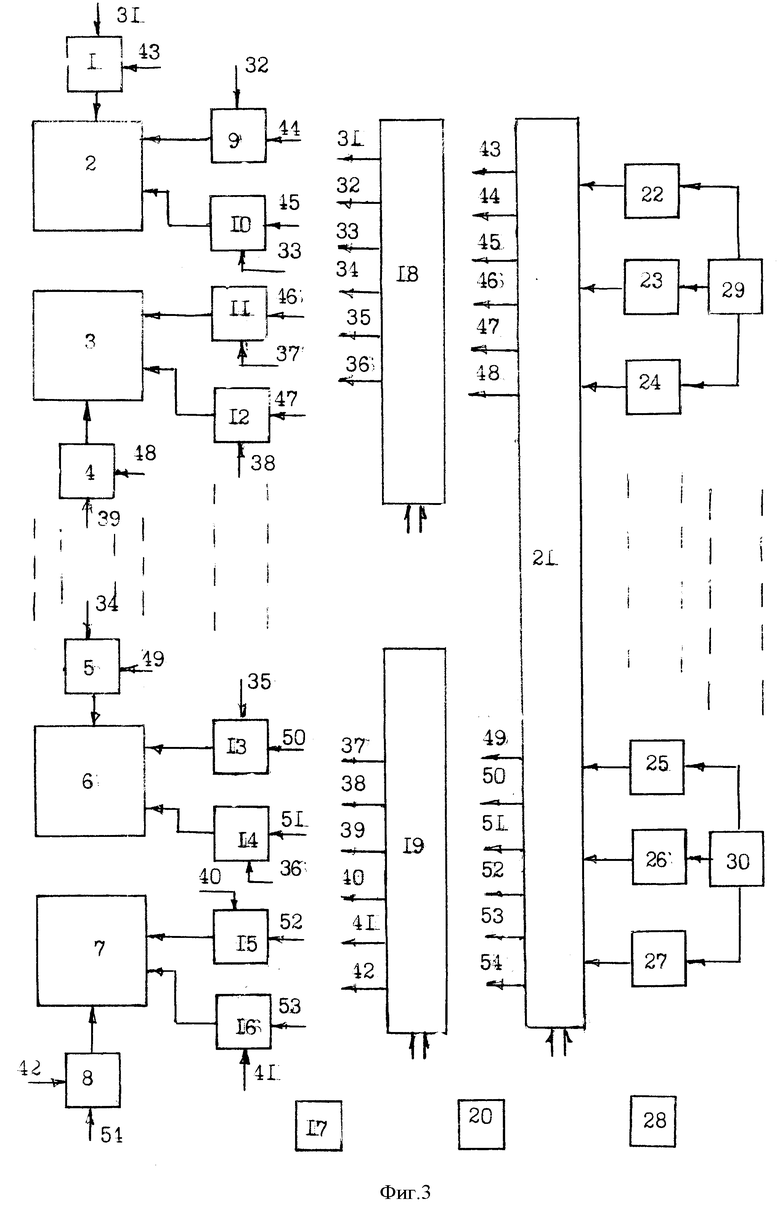
На фиг.3 представлена упрощенная функциональная схема системы движителей при их ручном переключении (изменение и стабилизация тяги и скорости перемещения ОН). На фиг.3 обозначены: 2 и 6 - ОС, 3 и 7 - РУ, 1, 4, 5, 8, 9-16 - УМ, 18 - переключатель глубины отрицательной обратной связи, ООС в УМ ОС, 19 - переключатель глубины ООС в УМ РУ, 21 - переключатель количества пар движителей, 22-27 - ФСУ, 29 и 30-ЗГ, 17 - измеритель нормальной составляющей статического давления среды на поверхность ОН, 20 - измеритель электропроводности среды, 28 - измеритель тяги или скорости перемещения ОН.
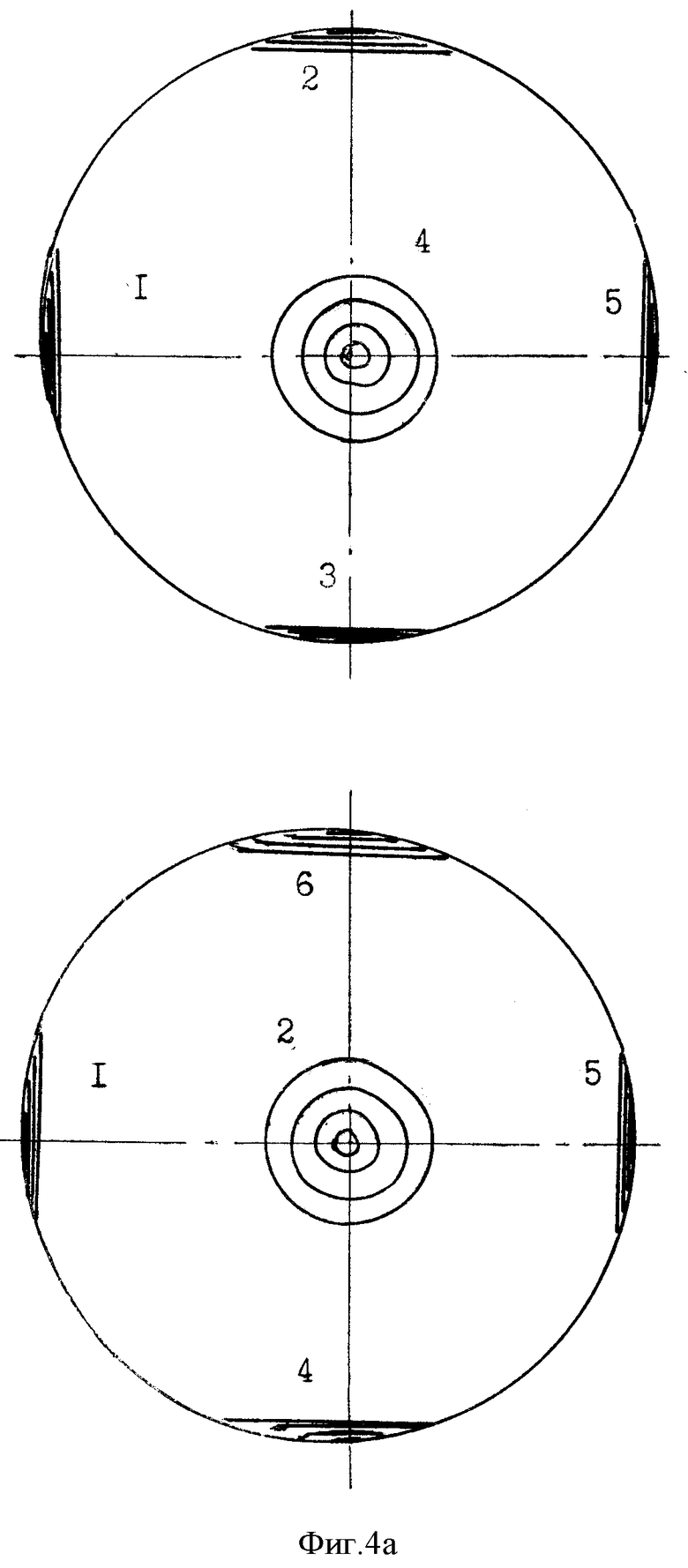
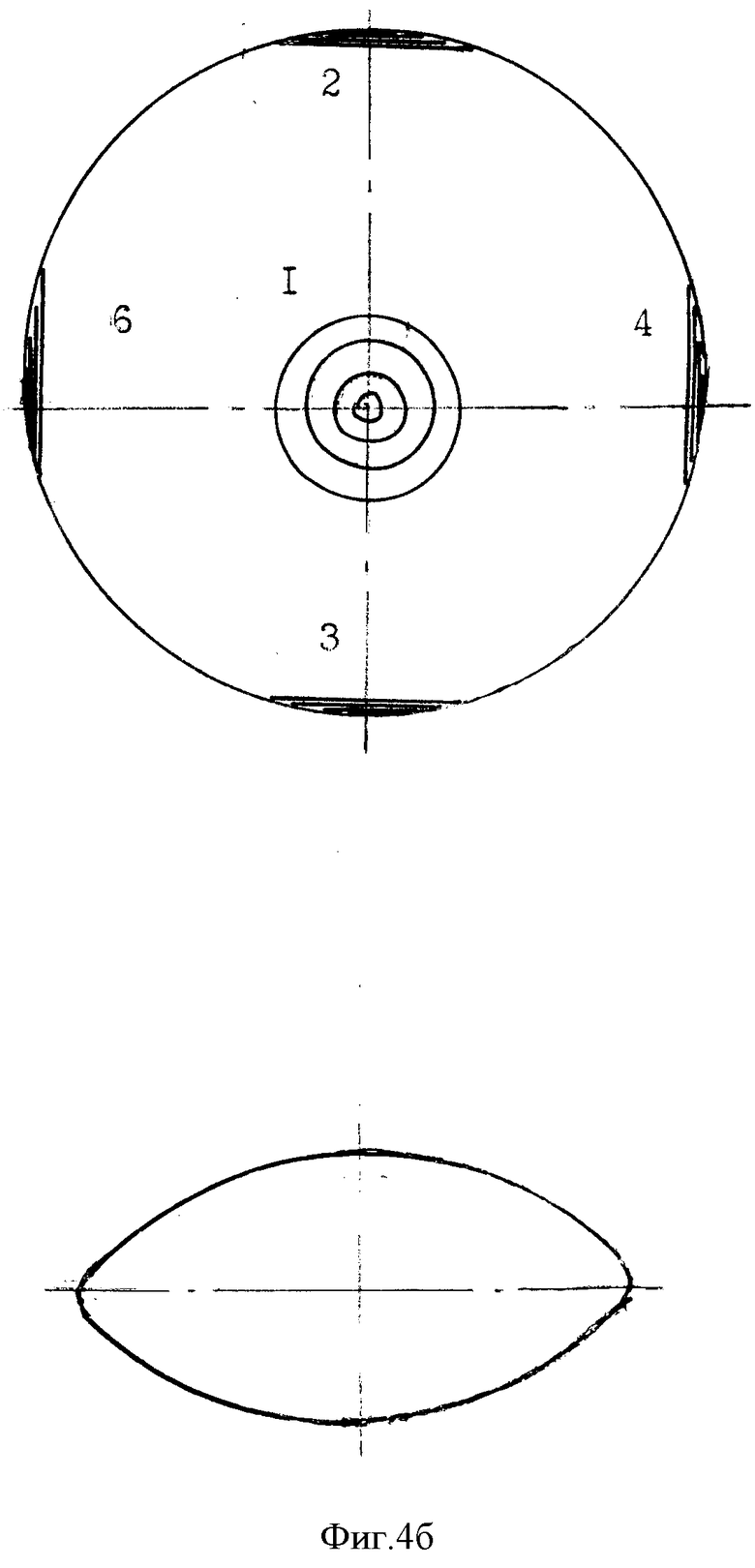
На фиг.4a представлена упрощенная схема размещения 6 систем движителей на ОН в виде шара. В каждой системе имеются два движителя. Каждая система расположена симметрично вокруг своей оси. Линией или окружностью обозначено РУ или ОС. Направление перемещения полей двух смежных движителей встречное.
На фиг.4б представлено упрощенно сечение корпуса ОН, подобное эллипсу. Превышение горизонтальных размеров над вертикальными создает большую устойчивость и меньшее сопротивление при гравитации.
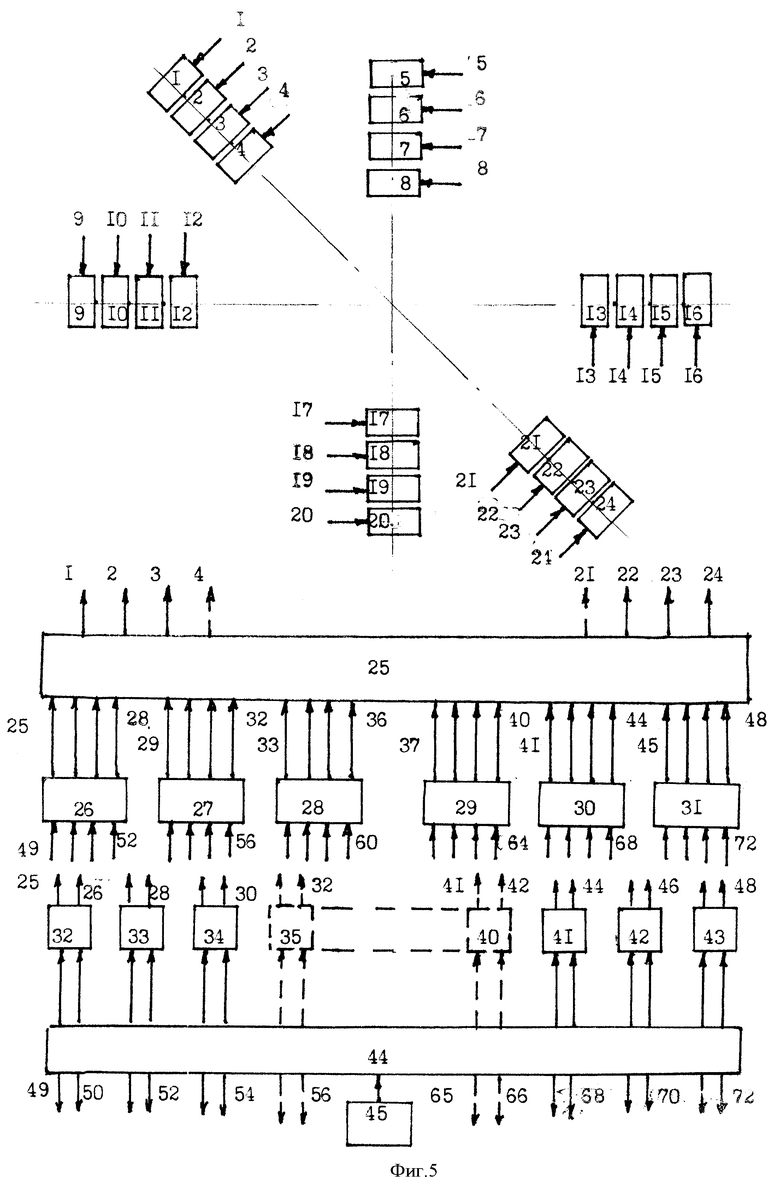
На Фиг.5 упрощенно представлена функциональная схема ОН. На схеме: 1-24 - РУ и ОС 12 движителей (в системе 2 движителя), 25 - блок УМ, 44 - ВИП, 45 - ПИП, 26-31 - ПСД, 32-43 - ПД и 49-72 - связи.
Литература
1. Ермолин Н.П. Электрические машины малой мощности. - М.: Высшая школа, 1967.
2. Хрущев В.В. Электрические микромашины переменного тока для устройств автоматики. - Л.: Энергия, 1969.
3. Коварский Е.М., Янко Ю.И. Испытания электрических машин. - М.: Энергоатомиздат, 1990.
4. Нейман Л.Р., Калантаров П.Л. Теоретические основы электротехники. - М. Л.: Госэнергоиздат, 1959.
5. Яворский Б.М., Детлаф А.А. Справочник по физике. - М.: Госиздат, Физико-математическая литература, 1963.
5. Карякин Н.И. и др. Краткий справочник по физике. - М.: Высшая школа 1963.
7. Казьмерковский М., Вуйцак А. Схемы управления и измерения в промышленной электронике. - М.: Энергоатомиздат, 1983.
8. Пашуков Е.Б. Устройство для создания перемещающегося магнитного поля - патент №2314625 от 21.11.2005.
9. Пашуков Е.Б. Способ и устройстве для уменьшения сопротивления движению объектов в пространстве (варианты) - патент №2313172 от 16.12.2005.
10. Пашуков Е.Б. Способ и устройство для создания силы упора (варианты) - патент №2313467 от 19.01.2006.
11. Пашуков Е.Б. Способ и устройство для создания изменяемой силы упора или тяги (варианты) - патент №2314969 от 14.03.2006.
12. Левин Н.Н., Поршин Н.Г. и Якушков А.В. Обращенный асинхронный двигатель - авторское свидетельство №1339784 A1 от 09.07.84.
13. Фомин Б.И. и др. Статор электромагнитного перемешивателя - авторское свидетельство №1251246 от 24.09.80.
14. Тимофеев В.Н. и др. Отъемная индукционная единица - авторское свидетельство №1469274 A1 от 12.05.87.
Изобретение относится к области гидро- и аэродинамики и направлено на усовершенствование объектов, находящихся и движущихся в пространстве. Предложенный способ реализуется с использованием электромагнитного движителя, основанного на электризации пограничного слоя среды и воздействий на него перемещающимся магнитным полем. Движение в пространстве обеспечивается определенным размещением движителей на транспортом средстве в соответствии с количеством степеней свободы. Отсутствие перемещающихся механических частей движителя дает возможность быстро изменять как направление, так и скорость движения объекта. Технический результат заключается в обеспечении способности перемещения в пространстве в различных направлениях и фиксироваться независимо от характера среды. 2 н. и 20 з.п. ф-лы, 5 ил.
1. Способ для перемещения в пространстве, включающий получение изменяемой силы тяги, упора или пары сил, приложенных к центру тяжести или массы объекта, отличающийся тем, что силы создаются направленным движением потока свободных зарядов и присоединенной массы пограничного слоя среды, обтекающей внешнюю поверхность корпуса объекта перемещения при воздействии на среду перемещающимися электрическими и магнитными полями, при этом на объекте используются шесть систем полей, расположенных симметрично относительно трех взаимно перпендикулярных осей, проходящих через центр тяжести или массы объекта, в каждой системе используются две пары полей и каждая пара состоит из одного электрического и одного магнитного полей, перемещающихся в одном направлении и составляющих элементарный движитель, при этом в двух соседних движителях создается противоположное перемещение, каждое поле располагают симметрично относительно оси объекта, при этом магнитное поле размещают ближе к его центру, в соответствии с необходимой мощностью движителя доводят напряженность и ширину полей до требуемой величины, создают синхронное перемещение полей в движителе при некотором опережении максимума напряженности электрического поля относительно магнитного, разгоняют поля до скорости, соответствующей необходимой скорости движения объекта, в период максимума напряженности электрического поля между электродами разрядного устройства создают разряд необходимой мощности и длительности, электрическим разрядом расщепляют атомы пограничного слоя среды на свободные заряды, воздействуют на заряды магнитным полем и направляют их и присоединенную массу от поверхности объекта, над поверхностью объекта создают область дефицита плотности или пониженного давления локального характера, при этом степень дефицита определяет величину вектора тяги или упора, а расположение области относительно центра объекта определяет направление вектора, перемещением, вращением области создают перемещение, вращение вектора, для движения объекта по оси создают более близкую к цели движения систему полей (БСП), окружающую эту ось, при торможении создают дальнюю систему полей (ДСП), расположенную вокруг этой оси по другую сторону от центра, при необходимости вращения вокруг оси создают по паре полей с двух сторон от центра при их вращении в обратную сторону, при торможении вращения поля реверсируют, для движения по прямой, не лежащей в плоскости двух осей, создают две БСП, окружающие эти оси, а при торможении создают две ДСП, для вращения вокруг прямой создают по одной паре полей с двух сторон от центра вокруг каждой оси, при этом поля должны перемещаться в одном направлении, но в противоположном по отношению к необходимому, для торможения поля реверсируют, при необходимости перемещения по прямой, не лежащей в плоскости двух осей, создают три БСП, при торможении создают три ДСП, для вращения вокруг симметричой прямой создают по одной паре полей с двух сторон от центра вокруг каждой из трех осей, при этом поля должны перемещаться в одном направлении, противоположном необходимому, для торможения поля реверсируют, для движения по оси и одновременного вращения вокруг нее создают БСП и в ДСП включают пару полей, вращающуюся в обратном направлении, для движения по оси и одновременного вращения вокруг другой оси создают БСП, окружающие первую ось, и включают по одной паре нолей с двух сторон от центра вокруг другой оси, в условиях гравитации для уравновешивания силы притяжения создают верхнюю систему полей вокруг вертикальной оси над центром тяжести.
2. Способ по п.1, отличающийся тем, что для увеличения скорости перемещения объекта-носителя (ОН) в системах полей увеличивают в четное число раз количество пар полей, делая их равным 4, 6, 8 и т.д. и понимая под парой одно электрическое и одно магнитное поля.
3. Способ по п.1, отличающийся тем, что для увеличения скорости перемещения ОН в системах полей производят замену на пары, перемещающиеся по большему радиусу.
4. Способ по п.1, отличающийся тем, что для увеличения скорости перемещения ОН увеличивают величину фазных напряжений, питающих системы образования полей.
5. Способ по п.1, отличающийся тем, что в режиме свободного падения ОН измеряют его скорость и плотность среды, вычисляют ускорение и вес ОН, на основании закона Архимеда вычисляют объем массы среды, необходимый для уравновешивания выталкивающей силы среды, дозированно забирают необходимую массу среды и вводят ее внутрь ОН, располагая ниже центра тяжести, при необходимости воздействуя сжатым воздухом, выводят забранную массу или ее часть из ОН, добиваясь необходимого равенства веса ОН и выталкивающей силы.
6. Способ по п.1, отличающийся тем, что для компенсации изменения силы трения корпуса ОН от изменения статического давления среды измеряют нормальную составляющую статического давления на корпус, скорость ОН и величины фазного напряжения обращенных статоров (ОС), сравнивают измеренные значения с необходимыми для получения номинального упора, тяги и момента вращения, выявляют несоответствие и изменяют фазное напряжение до получения необходимой скорости ОН.
7. Способ по п.1, отличающийся тем, что при движении объекта измеряют электропроводность среды, скорость ОН и фазное напряжение на электродах разрядного устройства, сравнивают измеренные значения с необходимыми для получения номинального значения упора и момента, выявляют несоответствие и изменяют напряжение на электродах разрядного устройства до получения необходимой скорости движения ОН.
8. Способ по п.1, отличающийся тем, что при движении ОН измеряют скорость ОН, электропроводность среды, нормальную составляющую статического давления на корпус ОН, фазные напряжения ОС и разрядное устройство (РУ) и плотность среды, сравнивают измеренные значения с необходимыми для получения номинальных значений упора и момента, выявляют несоответствие и дозированно впрыскивают в пограничный слой среды электропроводящую массу до получения необходимой скорости ОН.
9. Способ по п.1, отличающийся тем, что для увеличения скорости движения ОН увеличивают скорость перемещения электрического поля РУ и магнитного поля ОС, увеличивая частоту их электропитания.
10. Способ по п.1, отличающийся тем, что для увеличения тяги и момента устанавливают над поверхностью ОС и РУ магнитный шунт-отражатель (ШО), а для изменения направления тяги и момента профилируют поверхность ШО, обращенную к ОС.
11. Устройство для перемещения в пространстве, включающее герметичный корпус и балластную систему забора и содержания массы среды, окружающую корпус, отличающееся тем, что корпус имеет симметрию относительно трех взаимно перпендикулярных осей, проходящих через центр, при этом его вертикальные размеры меньше горизонтальных, корпус имеет обтекаемую форму, его внешняя поверхность покрыта защитным слоем, а внутренняя - экранирующим слоем, в корпус вмонтированы шесть систем электромагнитных движителей при этом каждая система расположена симметрично вокруг конца оси и состоит из двух движителей, имеющих встречное перемещение полей, каждый движитель имеет разрядное устройство (РУ) и обращенный статор (ОС), расположенные симметрично вокруг оси, соосно, рядом друг с другом, разделенные промежутком, при этом ОС расположен ближе к центру объекта-носителя (ОН), РУ является многофазной электрической системой, создающей электрический разряд, перемещающийся по поверхности корпуса вокруг его оси в плоскости, перпендикулярной оси, и расщепляющий атомы пограничного слоя на свободные электрические заряды, каждая его фаза является системой электродов, равномерно распределенных по поверхности корпуса и подключенных к выходу усилителя мощности (УМ), при этом между РУ и УМ в разрыв фазы включен автомат защиты (АЗ), предотвращающий возникновение самостоятельного разряда, ОС является многофазной электромагнитной системой, создающей магнитное поле, перемещающееся по поверхности корпуса вокруг его оси, в плоскости, перпендикулярной оси, отодвигая свободные заряды и присоединенную массу пограничного слоя среды от поверхности корпуса ОН, каждая его фаза является системой магнитных полюсов, равномерно распределенных по поверхности корпуса и подключенных к выходу своего УМ, ОС и РУ имеют одинаковое количество фаз, один и тот же временной сдвиг между фазами и один задающий генератор (ЗГ), вход каждого УМ через общий переключатель (ОП) подключен к выходу вторичного источника питаниям (ВИП), состоящего из задающего генератора (ЗГ), к выводу которого параллельно подключены входы фазосдвигающих устройств (ФСУ), при этом их количество равно числу фаз, выход каждого ФСУ подключен к входу усилителя напряжения (УН), выход которого является выходом ВИП, вход ВИП подключен к выходу первичного источника питания (ПИП), состоящего из аккумуляторных батарей (АБ) и солнечных батарей (СБ), размещенных на поверхности ОН, ОП состоит из шести переключателей систем движителей (ПСД) и двенадцати переключателей движителей (ПД), ПСД соединяют входы УМ с выходами ВИП, осуществляя подключение систем движителей к источнику питания, ПД соединяет входы УМ с выходами ЗИП, осуществляя подключение движителя к источнику питания, ОП выполнен в виде вертикального штока-кулисы с шарнирным соединением, позволяющим при переключении соблюдать пространственное соответствие между положением головки кулисы и направлением движения ОН, при этом движению вверх соответствует вертикальное верхнее положение, а движению вниз - вертикальное нижнее положение кулисы, переключение и реверс движителей осуществляются с помощью кнопочной станции, расположенной на пульте оператора.
12. Устройство по п.11, отличающееся тем, что каждая система движителей содержит четное число пар движителей, превышающее два, при этом движители окружают ось, соосны, разделены промежутками, их активные зоны выходят на внешнюю поверхность ОН и по мере приближения к центру их мощность увеличивается.
13. Устройство по п.11, отличающееся тем, что движители по мере приближения к центру ОН содержат более длинные зоны - зубцовые и электродные, а их ширина может уменьшаться, при этом количество пар полюсов может увеличиваться.
14. Устройство по п.11, отличающееся тем, что УМ или УН имеют регулируемую отрицательную обратную связь с ручным или автоматическим управлением, при ручном управление осуществляется с пульта оператора дистанционно, при автоматическом - с помощью исполнительного узла системы автоматического регулирования, состоящей из последовательной цепи звеньев: схемы сравнения, усилителя ошибки, усилителя мощности и исполнительного звена, при этом схема сравнения содержит датчик и задатчик параметра, включенные в мостовую схему.
15. Устройство по п.11, отличающееся тем, что внутри объекта размещена система искусственного увеличения веса объекта для уравновешивания выталкивающей силы среды, при этом система состоит из управляемого вентиля или клапана, вмонтированного в корпус объекта или трубопровод, емкости для приема забортной среды, источника сжатого воздуха, второго управляемого вентиля и двух трубопроводов, соединяющих через вентили емкость со средой и сжатым воздухом, измерителя плотности среды и измерителя объема принятой массы среды, при этом каждый измеритель состоит из датчика, блока преобразования и регистратора, датчик плотности размещен в нише на поверхности ОН, датчик объема размещен на или в балластной емкости, регистраторы - на пульте оператора, части измерителей соединены электрическими кабелями.
16. Устройство по п.11, отличающееся тем, что содержит комплекс измерителей: скорости перемещения ОН, нормальной составляющей статического давления среды на поверхность ОН и фазного напряжению ОС, каждый измеритель состоит из датчика, блока преобразования и регистратора, при этом измеритель фазного напряжения может состоять из одного регистратора-указателя, датчик скорости размещен на поверхности ОН по оси симметрии, датчик давления размещен в нише на поверхности ОН, регистраторы смонтированы на пульте оператора, части измерителей соединены электрическими кабелями, один датчик скорости обслуживает одну систему движителей, один датчик давления может обслуживать шесть систем движителей, в разрыв кабеля, соединяющего датчик и блок преобразования измерителя напряжения, может быть включен переключатель, позволяющий использовать блок и регистратор для многих измерений, УМ или УН каждого ОС и РУ имеют регулируемую отрицательную обратную связь при ручном или автоматическом регулировании, при ручном управлении орган регулирования размещен на пульте оператора, при автоматическом используется типовая система статического или астатического регулирования, датчик скорости ОН вынесен из пограничного слоя среды, обтекающей ОН.
17. Устройство по п.11, отличающееся тем, что содержит комплекс измерителей: скорости перемещения ОН, электропроводности среды и фазного напряжения РУ, каждый измеритель состоит из датчика, блока преобразования и регистратора, при этом измеритель напряжения может состоять из одного регистратора-указателя, датчик скорости размещен на поверхности ОН по его оси симметрии, датчик электропроводности размещен на поверхности ОН в нише, регистраторы смонтированы на пульте оператора, части измерителей соединены электрическими кабелями, один датчик скорости обслуживает одну систему движителей, один датчик электропроводности может обслуживать шесть систем движителей, в разрыв кабеля, соединяющего датчик и блок преобразования измерителя напряжения, может быть включен переключатель, позволяющий использовать блок и регистратор для многих измерений, УМ или УН каждого ОС и РУ имеет регулируемую отрицательную обратную связь при ручном или автоматическом регулировании, при ручном управлении орган регулирования размещен на пульте оператора, при автоматическом регулировании используется типовая система статического или астатического регулирования, датчик скорости вынесен из пограничного слоя среды.
18. Устройство по п.11, отличающееся тем, что содержит систему впрыскивания электропроводящей массы в пограничный слой среды перед или в РУ, состоящую из источников массы и сжатого воздуха, их смесителя, трех управляемых вентилей-клапанов, трубопроводов и форсунок, размещенных на поверхности ОН, при этом входы смесителя соединены трубопроводами с источниками, в трубопроводы вмонтированы вентили, выход смесителя соединен с форсунками параллельными трубопроводами, имеющими общую часть с вентилем, вентили имеют механизм или схему синхронизации и регулирования длительности их работы с ручным или автоматическим управлением, комплект измерителей скорости движения ОН, напряжений РУ и ОС, электропроводности, плотности и нормальной составляющей статического давления среды, при этом измерители имеют состав, размещение и схему соединений аналогичные.
19. Устройство по п.11, отличающееся тем, что содержит в ВИН, ЗГ, вырабатывающие сигнал различной частоты, при этом частота может изменяться плавно или ступенчато от руки оператора с пульта управления или автоматически от системы стабилизации скорости перемещения ОН.
20. Устройство по п.11, отличающееся тем, что содержит магнитные шунты-отражатели (ШО), охватывающие с зазором ОС и частично РУ, имеющие обтекаемую форму и профилированный зазор, позволяющий изменять направление отраженного потока зарядов и массы пограничного слоя среды от скошенной внутренней поверхности ШО, заправляя его в зазор следующего движителя или под острым углом к поверхности ОН, ШО крепится к ОС кронштейнами, изготовленными из немагнитного материала, имеющими обтекаемую форму, при этом некоторые движители могут быть без ШО.
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ИЗМЕНЯЕМОЙ СИЛЫ ТЯГИ ИЛИ УПОРА | 2006 |
|
RU2314969C1 |
| Устройство для снижения сопротивления трения движущегося в воде объекта | 1972 |
|
SU457629A1 |
| DE 1956760, 19.05.1971 | |||
| US 6332593, 25.12.2001. | |||

