Изобретение относится к гидро- и аэродинамике объектов, находящихся и движущихся в пространстве. Изобретение также относится к электрическим асинхронным машинам и может быть использовано в судостроении и ракетостроении. Предлагается новый тип движителя, способный создавать силу упора, независимо от характера среды. Изобретение является пионерным.
В качестве отдаленного аналога можно рассмотреть асинхронный электрический двигатель с короткозамкнутым ротором типа "беличья клетка". Вращающееся магнитное поле, ВМП, в двигателе создается за счет магнитопровода круговой конструкции, имеющей, систему пазов и зубцов, расположенных по окружности внутренней расточки статора. При трехфазной системе питания в пазы укладываются три обмотки. Они распределены по окружности статора так, что между осями полюсов имеется угол в 120 градусов. Наличие в симметричной трехфазной, системе временного и пространственного сдвига в 120 градусов обуславливает появление ВМП.
Путь распространения магнитного потока проходит через зубцы, обращенные к оси вращения магнитного поля, зазоры между статором и ротором и тело ротора. На периферии магнитный потов замыкается по ярму. Магнитный поток пересекает стержни "беличьи клетки" (они проходит параллельно оси вращения), наводит в них электрический ток. От последнего возникает магнитное поле, взаимодействующее с первичным магнитным полем. Создается вращающий момент, приложенный к ротору (1, с.270-278). Ротор увлекается магнитным полем статора с некоторым отставанием (скольжением). На наружную поверхность статора магнитное поле почти не выходит (исключая потоки рассеяния). Однако в рассматриваемом случае (создание нового движителя) требуется его выход на поверхность статора, например, раскручивание пограничного слоя среды, в которой движется объект. При этом пограничный слой должен обладать определенной элетропроводностью. Указанное способно компенсировать силу давления среды на корпус объекта и снижать лобовое сопротивление.
С целью получения вращающегося магнитного поля при помощи трехфазной системы обмоток статора последние должны иметь оси, сдвинутые в пространстве на 120 градусов. Направление, в котором основная волна индукции имеет наибольшее значение, называют осью магнитного поля.
Магнитное поле, ось которого вращается, принято называть вращающимся магнитным полем. Если значение индукции в воздушном зазоре в точке, лежащей на оси полюса вращающегося поля, остается неизменным, то такое поле называют круговым вращающимся полем, так как его можно изобразить вращающимся вектором неизменной длины, описывающим своим концом окружность (4, часть вторая, с.186).
Другим аналогом может быть однофазный конденсаторный асинхронный электродвигатель, ротор которого выполнен в виде беличьей клетки или в виде тонкостенного немагнитного полого цилиндра (1, c.278-316). В этих двигателях используются две отдельные однофазные обмотки, распределенные в пазах статора и взаимно сдвинутые по его окружности на половину полюсного деления. В одну из обмоток включается фазосдвигающий конденсатор. При этом поле получается эллиптическим и снижается коэффициент полезного действия, КПД.
Третьим аналогом (прототипом) может быть асинхронный двухфазный управляемый двигатель (2, с.128-161). Ротор такого двигателя является короткозамкнутым и выполняется в виде беличьей клетки или полого немагнитного с внутренним магнитопроводом. На статоре двигателя располагаются две распределенные обмотки, сдвинутые в пространстве на 90 электрических градусов. Одна обмотка (ОВ) называется обмоткой возбуждения. Она постоянно включена в сеть переменного тока. Вторая обмотка (ОУ) является управляющей. Применяются следующие режимы управления: амплитудный, фазовый и амплитудно-фазовый. Этот аналог больше других может быть прототипом, так как вращается полый ротор (подобие пограничного слоя) и возможно плавное изменение скорости вращения.
Общей особенностью рассмотренных аналогов является обращение полюсов статора (зубцов статора) внутрь, к оси вращения. Последнее делает невозможным их использование для воздействия на пограничный слой и вынуждает осуществить конструктивные изменениям.
Понимая, что магнитное поле может воздействовать только на свободные электрические заряды, находящиеся в пограничном слое (степень воздействия определяется силой Лоренца), условно заменим это воздействие на обычное, механическое, подобное от действия вращающегося диска, кольца или винта. Такое упрощение позволит приблизительно оценить необходимые скорость и мощность вращения. Далее в эти цифры будут внесены поправки.
С целью создания вращающегося магнитного поля используется принцип, лежащий в основе работы асинхронного двигателя (используется только статор). Его магнитная система проходит через внутреннюю часть, включающую воздушный зазор и ротор. В предлагаемой магнитной системе магнитный поток выходит на внешнюю поверхность статора (зубцы обращены от оси вращения, а ярмо перенесено внутрь).
Указанное пространство обладает магнитной проводимостью более низкой по сравнению с магнитопроводом, выполненным, например, из электротехнической стали. При индукции, равной 1 Тл, падение намагничивающей силы на единицу длины потока по воздуху в 50-300 раз больше, чем на ферромагнитных участках магнитопровода. При индукции в зубцах в 2 Тл это отношение уменьшается до 6-8 (3, с.66). Очевидно, что в предлагаемой конструкции статора (назовем его обращенным статором) необходимо до минимума снизить длину пути магнитного потока вне магнитопровода (от полюса до полюса). Это достигается увеличением до возможного максимума числа пар полюсов.
Другое мероприятие заключается в подъеме индукции до возможного максимума в зубцах статора. Оно возможно за счет выбора материала магнитопровода и оптимальной геометрии. Длина пути магнитного потока по магнитопроводу должна значительно превышать длину пути вне его. При этом не должно происходить насыщение магнитопровода.
Рассмотренное подтверждается формулой для величины номинального пускового момента, приходящего на один ватт потребляемой мощности для асинхронного двигателя с полым ротором (2, с.148-152)

где: Р - число пар полюсов, f - частота питающей сети, А - коэффициент, структуру которого можно определить из указанного источника.
В соответствии с (1, с.271) вращающий момент многофазного асинхронного двигателя определяется выражением

где: mФ - число фаз статора, UФ - фазное напряжение питающей сети, ω1 - угловая синхронная скорость вращающегося поля, К - сомножитель, включающий электрическое сопротивление и скольжение.
Из выражения 2 следует, что момент можно увеличить за счет увеличения напряжения (наиболее аффективно), числа фаз и снижения электрического сопротивления пограничного слоя среды, в которую помещен обращенный статор. Увеличение первых двух величин осуществляется обычными схемными решениями. Уменьшение сопротивления возможно за счет искусственного внесения в пограничный слой вещества (его раствора), например электролита. Увеличение электропроводности возможно путем предварительной ударной ионизации. Последняя возникает (сопровождает) процесс раскрутки пограничного слоя.
Основное назначение обращенного статора заключается в воздействии на пограничный слой среды (снижение лобового сопротивления), в которой движется объект (аппарат). Обращенный статор устанавливается в головной части аппарата перед и на самом напряженном (в смысле лобового сопротивления) участке. При этом ось вращения магнитного поля должна совпадать с продольной осью симметрии аппарата.
В указанной системе пограничный слой находится под действием центробежной силы, силы противодействия вхождению в магнитное поле и силы трения. Вкладывая энергию в магнитное поле обращенного статора, мы уменьшаем силу давления среды на корпус, т.е. силу трения. Последнее приводит к значительной экономии энергии главной энергетической установки.
Кинетическая энергия вращающегося пограничного слоя определяется по формуле

где: m - масса пограничного слоя, V - линейная скорость вращения пограничного слоя.
Массу пограничного слоя можно рассчитать по формуле

где геометрические параметры слоя: L - длина, R - наименьший радиус, δ - толщина, ρ - плотность слоя.
Синхронная (угловая) скорость вращения магнитного поля имеет зависимость

Центробежная сила, обусловленная вращением магнитного поля, имеет вид

где: m - масса элементарного объема пограничного слоя, R - радиус вращения и V - линейная скорость вращения элементарного объема.
Сила статического давления среды на наружную поверхность обращенного статора или на элементарный объем пограничного слоя определяется по формуле

где: P0 - абсолютное давление на границе двух сред (воды и воздуха), γh - избыточное (дефицитное) давление, h - глубина погружения (высота полета) аппарата, γ - удельный вес среды.
Приравняв выражения 6 и 7, получим формулу для нахождения необходимой скорости вращения магнитного поля в зависимости от горизонта движения

Встречный поток оказывает динамическое давление на поверхность статора (точнее его нормальная составляющая). Последняя связана с углом расхождения носовой части аппарата зависимостью

где: Рдин. - динамическое давление потока, Рн.д. - нормальная составляющая динамического потока, α - угол расхождения носовой части аппарата.
Общее давление среды на аппарат равно сумме нормальных составляющих статического и динамического

Приравняв выражения 6 и 9 и решая относительно V, получим зависимость для скорости вращения магнитного поля
где 
Известно (1, c.11), что магнитное поле в расточке асинхронного статора может вращаться со скоростью от 1000 до 180000 об/мин. Частота питающего напряжения находится в диапазоне от 50 до 3000 гц.
В случае самоходного подводного аппарата, СПА, наибольшая скорость набегающего потока составляет 1800 м/мин. Линейная скорость вращения ротора асинхронного двигателя мощностью 1000 Вт, диаметром 0,2 м и скоростью 3000 об/мин составляет 1880 м/мин.
Для летательного аппарата, ЛА, наибольшая скорость набегающего потока составляет 25800 м/мин. При среднем радиусе статора в 0,2 м поле должно совершать 20541 об/мин.
Приведенные данные показывают реальность выполнения данного предложения при использовании обычной технологии и материалов.
Таким образом, обращенный статор должен быть электрической машиной, аппаратом многофазным, высоковольтным, многополюсным, с повышенной частотой питания, с запасом по мощности и скорости вращения магнитного поля. При этом его внешний диаметр в большинстве случаев определяется внешним диаметром объекта использования статора, внутренний диаметр и длина по оси вращения определяются необходимой мощностью. Ширина зубцов доводится до минимума, а их длина по оси вращения определяется максимально возможной индукцией в зубце. Межполюсное расстояние доводится до возможного минимума.
Рассчитаем необходимую мощность обращенного статора для СПА и ЛА, используя формулы 3 и 4. Скорость вращения пограничного слоя должна во много раз превосходить скорость набегающего потока, точнее его составляющую, параллельную поверхности

где: К1 - коэффициент превышения. При значительном К1 траектория движения элементарного объема пограничного слоя будет представлять спираль с малым шагом. Более точное значение скорости можно рассчитать по формуле 11.
Пусть обращенный статор имеет внешний диаметр 0,4 м, плотность воды 1000 кг/м3, скорость набегающего потока 30 м/с, значения К1: 1, 5 и 10, толщина пограничного слоя 0,01 м, угол расхождения носовой части аппарата 90 град. и длину 0,64 м. При перечисленных значениях полезная мощность обращенного статора должна составлять соответственно 1,8, 45 и 180 кВт. При этом масса пограничного слоя составляет 8,24 кг.
Пусть обращенный статор для СПА имеет 40 пар полюсов, тогда в соответствии с формулой 5 обеспечить скорости вращения магнитного поля 21, 105 и 210 м/с можно, используя частоты питания 669, 3339 и 6678 Гц.
Для ЛА оценим необходимую полезную мощность, принимая указанные диаметр, длину обращенного статора, угол расхождения носовой части ЛА, значения коэффициента К1. Плотность воздуха принимаем равной 1,226 кг/м3, а скорость набегающего потока 430 м/с. Масса пограничного слоя, рассчитанная по формуле 4, составляет 0,01 кг. Полезная мощность равна 0,5 кВт, 11,3 кВт и 45,3 кВт. Пусть статор имеет 40 пар полюсов, тогда для обеспечения скорости вращения магнитного поля в 301, 1505 и 3010 м/с необходимо иметь частоты питания в 9586, 47930 и 95860 Гц.
Движение ЛА с большой скоростью сопровождается значительным нагревом пограничного слоя и его электризацией. Наличие электрических зарядов, движущихся в магнитном поле, обуславливает появление сил Лоренца, изменяющих траекторию зарядов. Пусть коэффициент K1>>1, тогда (см. ф.12) можно представить, что заряды пронизывают однородное магнитное поле перпендикулярно вектору его напряженности и на них действует сила Лоренца, равная

где: е - величина заряда, υ - скорость движения заряда, Н - напряженность магнитного поля.
Заряды вращаются по окружности радиуса

где m - масса заряда. При этом заряды, имеющие разные знаки, вращаются в противоположных направлениях. Однако процесс электризации пограничного слоя и корпуса ЛА сопровождается разделением зарядов разного знака. Например, на корпусе возникает избыток отрицательных зарядов, а в пограничном слое - положительных зарядов. Последнее дает возможность говорить о преобладающем движении зарядов в пограничном слое - в одном направлении. При этом электризация сопровождается разрядами и ударной ионизацией. В случае высокой степени ионизации газ превращается в плазму, обладающую электропроводностью, подобную проводникам (5, с.375).
В общем случае υ не перпендикулярно Н и υ необходимо разложить на две составляющие: υn -лежащую в плоскости, перпендикулярной Н, и υt - направленную вдоль Н. Вторая составляющая превращает движением по окружности в движение по спирали. При этом время обращения по спирали так же не зависит от υ, как и время обращения по окружности.
В случае наличия вращающегося магнитного поля, особенно эллиптического, действие поля на заряженную частицу можно охарактеризовать как импульсное с пологими фронтами. Временная последовательность таких импульсов должна раскрутить заряд по расходящейся спирали и отодвинуть от корпуса объекта. Тяжелые заряды, обладающие сравнительно большой массой (ионы, протоны), при движении должны иметь присоединенную массу. Последнее увеличивает степень воздействия магнитного поля на пограничный слой.
На практике не существует идеального кругового вращающегося магнитного поля. Каждое поле является эллиптическим (степень эллиптичности разная). Последнее обуславливает и определенную асимметрию в раскручивании. С целью ее компенсации процесс раскручивания должен состоять из двух действий (последовательных): раскручивание в одном направлении и раскручивание в противоположном. Пограничный слой последовательно проходит два вращающихся магнитных поля.
В некоторых случаях (конструктивные особенности или ходовые и летные) нет необходимости иметь магнитное поле, вращающееся по окружности. Достаточно иметь поле, перемещающееся по замкнутой эллиптической кривой или подобной ей, по незамкнутой кривой, по прямой линии и т.п. В этом случае обращенный статор круговой превращается в некруговой или в развернутый нелинейный или в линейный.
″Разрезая″ круговой обращенный статор по радиусу в районе паза, можно путем ″развертывания″ его в линейку (прямоугольный параллелепипед) или в иную фигуру получить непрерывное движение магнитного, поля в одну сторону, например, слева направо. Располагая такую линейку (фигуру) на корпусе объекта (аппарата) и ориентируя ее по-разному относительно оси симметрии, можно получить необходимый эффект снижения лобового сопротивления.
Алюминиевый стакан вращается в расточке статора, так как его материал обладает электронной проводимостью и сцеплен с магнитным потоком. Наличие указанных условий является обязательным. Существование в материале (пограничном слое) свободных зарядов разного знака и в равном количестве обусловит появление вихревых токов противоположного направления и соответствующих вращающих моментов, компенсирующих друг друга. Отсутствие потокосцепления у пограничного слоя также обусловит нулевой вращающий момент.
При наличии результирующего вращающего момента пограничный слой, прошедший обращенный статор по структуре (поле скоростей) будет подобен пограничному слою, образованному на корпусе корабля или ЛА. Его средняя скорость будет обусловлена средней скоростью вращения магнитного поля и скоростью перемещения объекта (сложение двух векторов). Пульсационная составляющая (наличие турбулентности) определяется неравномерностью магнитного поля и неоднородностью пограничного слоя.
Рассмотрим пригодность обращенного статора для работы в различных средах. Металлы обладают электронной проводимостью. Свободные электроны, имеющие минусовой заряд, обуславливают появление результирующего вращающего момента. Жидкости и газы обладают ионной проводимостью. В них имеются как частицы, заряженные плюсом, так и минусом. При их равном количестве результирующий момент равен нулю (нет вращения).
В обычных (естественных) условиях жидкости и газы электрически нейтральны. Однако существуют обстоятельства (условия), при которых они теряют нейтральность и становятся полярными. При этом разность потенциалов может достигать очень большой величины (разряд между облаками или между облаком и землей). Указанное обуславливает необходимость наличия на корпусе объекта перед обращенным статором участка для интенсивной электризации пограничного слоя. Во избежание разряда как участок, так и поверхность статора должны быть покрыты электроизолирующим слоем. Длина участка определяется необходимой степенью электризации.
Назовем первый участок траектории относительного движения пограничного слоя участком поляризации. Второй участок вниз по потоку назовем участком раскручивания. На этом участке находится обращенный статор. Третий участок, создающий наибольшее сопротивление, назовем участком сопротивления. Благодаря работе обращенного статора, пограничный слой на третьем участка должен иметь дефицит плотности. На четвертом участке плотность пограничного слоя восстанавливается из-за действия сил Архимеда на ракрученные массы. Этот участок назовем участком коллапса.
В создании вихревых токов и соответствующих моментов участвуют заряженные частицы, обладающие массой (в том числе и присоединенной). Уточним характер взаимодействия вихревых токов разного (противоположного) направления, их магнитных полей с основным вращающимся магнитным полем. Воздух является парамагнетиком (относительная магнитная проницаемость больше 1) и при воздействии внешнего магнитного поля создается преимущественное направление в расположении элементарных магнитных моментов, воздух оказывается намагниченным. Степень намагниченности незначительна.
Роль орбитальных моментов мала в намагничивании. Основными элементарными носителями магнетизма являются спиновые моменты, образующие в результате вращения электрона вокруг своей оси. Однако их может оказаться недостаточно и необходима дополнительная операция над пограничным слоем. С целью выбивания электронов с высоких уровней в атомной структуре возможна ударная ионизация с помощью искрового разряда. В воздухе образуются электронные лавины, приводящие к образованию каналов повышенной электропроводности. Скорость распространения электронной лавины меньше, чем скорость образования электропроводящего канала. Последнее обусловлено фотонной ионизацией воздуха (6, с.372-377 и 5, с.213).
Система искровых разрядников размещается на корпусе ЛА на первом участке, перед обращенным статором, равномерно по окружности. Подача высокого напряжения на электроды может быть синхронизирована с перемещением магнитного поля. При этом очередной разряд должен происходить с опережением, величина которого определяется временем ионизации промежутка: электрод, обращенный статор. Отметим, что использование ударной ионизации является мерой, дополняющей электризацию пограничного слоя от трения. При сравнительно малой скорости перемещения ЛА, при коротком первом участке такая мера может оказаться основной.
В случае СПА ионный разбаланс в воде можно осуществить следующим образом. Во-первых, впрыскиванием в пограничный слой раствора вещества, имеющего необходимые ионы и обладающего повышенной электропроводностью. В качестве такого может быть щелочной электролит с удельной электропроводностью 6 сим/м. Такие ионы можно отбирать из раствора, в котором происходит электролиз. Источником отрицательно заряженных ионов является пространство, окружающее анод. Источником положительно заряженных ионов является пространство, окружающее катод. Отбирая часть ионов одного знака полярности и впрыскивая их под давлением в пограничный слой, можно осуществить электризацию. Способ громоздкий, дорогой и тяжело управляемый. Его также можно использовать и для ЛА.
Оптимальным способом электризации пограничного слоя является самостоятельный разряд (искровой разряд для воздуха). Разряд должен проходить в поперечном направлении (относительно перемещения пограничного слоя, ПС) и близко к обращенному статору, ОС. Во избежание короткого замыкания электрической схемы в начале разряда схема автоматом защиты должна отключаться от электродов разрядника. Самостоятельный разряд может иметь разрушительные последствия, что при реализации способа заставит перейти к несамостоятельному. При этом последним легче управлять. Таким образом, и для СПА разряд является способом электризации ПС.
Электропроводность воды (особенно соленой и теплой) значительно превышает электропроводность воздуха. Последнее позволяет в случае СПА значительно увеличить расстояние между электродами и уменьшить напряжение на них.
В случае ЛА уместно вспомнить закон Столетова: наибольший ток для газа наблюдается при одном и том же отношении напряженности поля (электрического) к давлению (12, с.211). При изменении высоты ЛА необходимо изменить и напряжение на электродах. В противном случае несамостоятельный (тихий) разряд может превратиться в самостоятельный (разрушительный).
В случае водной среды (СПА) с увеличением давления (глубины погружения) электропроводность уменьшается для глубин ниже скачка плотности (температуры). При маневрировании СПА в этом диапазоне глубин можно ориентироваться на закон Столетова. Однако выше скачка плотности закономерность обратная, так как здесь электропроводность в основном определяется увеличением температуры при погружении (антарктическая водная структура). В умеренных широтах температура с глубиной понижается, уменьшается электропроводность и можно более уверенно ориентироваться на закон Столетова. Иными словами: вертикальный разрез электропроводности (температуры) является критерием для определения величины напряжения на электродах разрядного устройства.
При быстром движении СПА на его корпусе возможна кавитация, образование областей с дефицитом давления, с избытком свободных ионов и с увеличением электропроводности (5, с.517). Первый участок, там, где расположено разрядное устройство, а также пространство обращенного статора, может быть местом кавитации, усиливающейся последующим кольцом второго разрядного устройства и обращенного статора (двухступенчатая ″раскрутка″ пограничного слоя). В начальный период такая система работает в водной среде (этап разгона). Номинальный режим работы проходит в водно-газовой среде. При торможении работа происходит в водной среде. Система может быть многоступенчатой, т.е. состоять из значительного количества пар. Каждая пара включает разрядное устройство и обращенный (развернутый) статора. При этом последующие ступени могут и не иметь разрядного устройства. С увеличением глубины (статического давления) кавитационная составляющая должна уменьшаться.
Целью изобретения является создание силы упора, имеющей определенную направленность и величину и способную перемещать объекты в воде, в воздухе, а также в космическом пространстве.
Сущность изобретения заключается в следующем. С помощью специальной электрической машины, преобразованного (обращенного или развернутого) асинхронного статора создается вращающееся (перемещающееся) магнитное поле, выходящее на поверхность статора. Над зубцовой зоной статора с зазором располагается магнитный шунт. Его форма обеспечивает выход магнитного поля в пространство разрядного устройства, а также необходимый угол поверхности шунта, в которую направляется пограничный слой. При этом создается сила упора как составляющая.
Перед статором размещается разрядное устройство, электроды которого имеют контакт с пограничным слоем. Электрические разряды, пронизывающие пограничный слой, насыщают его свободными зарядами. Последние, подпадая в магнитное поле, выталкиваются силами Лоренца и воздействуют на поверхность шунта. Вращения магнитного поля статора и электрического поля разрядного устройства синхронизированы. Угол наклона поверхности шунта определяет величину силы упора.
Рассмотрим принципы построения разрядного устройства. Устройство должно создавать вращающееся (перемещающееся) электрическое поле. Поле синхронно с магнитным должно совершать в пространстве аналогичное вращение (перемещение). Конструктивное исполнение аналогично исполнению обращенного статора, ОС (развернутого статора, PC). Отличия заключаются в следующем: отсутствует магнитопровод и обмотка, вместо зубцов используются электроды. Система электродов, подключенных к одной фазе питания, должна размещаться в одной плоскости. В этой же плоскости размещаются электроды, подключенные к нулевой линии. Система электродов, подключенных к другой фазе, и соответствующий набор электродов нулевой линии должны размещаться в другой плоскости. Между плоскостями должен быть изоляционный промежуток, предотвращающий паразитный разряд.
Движение ЛА и СПА возможно с переменной скоростью и изменяемым горизонтом. Последнее обуславливает изменение нормальной составляющей общего давления на поверхность аппарата (см. ф.10) и пограничный слой. Изменяется сила трения между движущимися частями пограничного слоя, ПС. Для компенсации увеличения силы трения между частями присоединенной массы ПС (на эту массу не действует сила Лоренца, см. ф.13) необходимо увеличить скорость вращения магнитного поля. При уменьшении силы трения целесообразно уменьшить ее и тем самым сэкономить энергию. Возможность гибко изменять скорость вращения магнитного поля, МП, в зависимости от параметров перемещения аппарата является необходимым условием оптимальной работы. Рассмотренное обуславливает необходимость использования в качестве ОС и PC асинхронного двухфазного (двухобмоточного) управляемого статора, несмотря на его недостатки.
Перечислим необходимые действия для снижения лобового сопротивления ЛА, летящего на одной высоте при постоянной скорости.
1. Расположение перед участком поверхности ЛА, создающим наибольшее сопротивление, ОС.
2. Расположение перед ОС разрядного устройства, РУ.
3. При помощи ОС создание магнитного поля, вращающегося вокруг оси симметрии (продольной оси) указанного участка.
4. Раскручивание магнитного поля до необходимой скорости.
5. Усиление магнитного поля до необходимой напряженности.
5. Расположение перед ОС разрядного устройства.
7. Ориентация РУ относительно оси вращения магнитного поля (совмещение их осей).
8. Установка между ОС и РУ необходимого зазора.
9. Ориентация РУ относительно ОС (совмещение зубцов и электродов).
10. Синхронизация работы ОС с работой РУ.
11. Установка необходимой мощности разряда (напряжения).
12. Установка необходимой длительности разряда (п. может отсутствовать).
13. При необходимости установка второго комплекта ОС и РУ, при этом магнитное и электрическое поля должны вращаться в обратную сторону (п.п.1-12 повторяются).
14. Установка третьего комплекта ОС и РУ, при этом магнитное и электрическое поле должны вращаться в направлении, совпадающем с полем первого комплекта (п.п.1-12 повторяются).
15. Установка четвертого комплекта ОС и РУ, при этом магнитное и электрическое поле должны вращаться в направлении, совпадающем с полем второго комплекта (п.п.1-12 повторяются).
Количество комплектов ОС и РУ определяется продольной протяженностью участка поверхности ЛА, создающего наибольшее сопротивление.
Рассмотрим более подробно действия, лежащие в основе работы РУ.
С целью повышения КПД работа РУ и ОС должна быть синхронизирована, т.е. они должны запитываться от одного источника переменного напряжения. В основе необходимости синхронизации лежит принцип: нет магнитного поля, не нужны свободные электроны в ПС. При максимальном магнитном поле должно быть наибольшее количество свободных электронов в ПС. Между напряженностью магнитного поля и количеством электронов должна существовать прямо пропорциональная зависимость.
В соответствии с действием силы Лоренца заряды, попавшие и образованные в ПС, проходя магнитное поле, будут вращаться по спирали и подниматься (отклоняться) от поверхности ЛА (СПА). При этом у электронов и положительно заряженных ионов вращение происходит в противоположных направлениях. По мере выхода из магнитного поля (отклонения от поверхности) радиус вращения зарядов увеличивается (магнитное поле слабеет). Ось спирали направлена в сторону вращения магнитного поля. Легкие электроны быстрее увлекаются полем и выходят на его периферию. Тяжелые ионы (протоны) отстают от электронов. Однако после разгона они дольше следуют за полем и их периферийное положение более удалено от оси вращения (центрифугирование зарядов).
Перечень действий, снижающих лобовое сопротивление СПА, идущего на одной глубине при постоянной скорости, аналогичен рассмотренному (способ первый). Роль присоединенной массы в рассмотренном движении зарядов возрастает, так как увеличиваются межмолекулярные силы притяжения.
Движение ЛА и СПА с увеличивающейся скоростью сопровождается увеличением количества зарядов, оказывающихся в промежутке между РУ и ОС. Последнее обуславливает некоторое торможение аппарата ПС. Уменьшить его можно путем увеличения скорости вращения магнитного поля. Здесь уместна грубая аналогия с работой бульдозера: его рабочий орган(щит) должен располагаться под острым углом к линии движения. Увеличение окружной составляющей в магнитном поле позволит увеличить количество зарядов, размещенных перед фронтом вращающегося магнитного поля и вовлечь их во вращательное движение.
Изменение скорости вращения магнитного поля асинхронного статора возможно путем изменения частоты питающего напряжения (см. ф.5). Однако такое изменение возможно в узком диапазоне частот (препятствуют распределенные параметры электромагнитной системы, снижающие мощность). Возможно изменять скорость вращения путем изменения числа пар полюсов (см. ф.5). Иметь несколько фиксированных скоростей или расширенный диапазон скоростей можно, применяя многообмоточную систему и изменяемую частоту питания. Такое исполнение заставляет применять сложный переключатель обмоток и сложный источник питания. При этом оптимальный режим работы ОС будет на одной скорости или в узком диапазоне изменения скоростей.
Использование двухобмоточного управляемого ОС сопровождается резким падением КПД и значительным увеличением степени эллиптичности магнитного поля. Однако здесь возможно плавное изменение скорости в большом диапазоне. При этом отработаны схемы включения ОС в системы автоматического регулирования. Учитывая изложенное, принцип двухобмоточного управления можно использовать в качестве второго независимого способа уменьшения лобового сопротивления.
Способ состоит из следующих действий. П.п.1-15 аналогичны первому способу.
16. При амплитудном режиме управления обмотку возбуждения ОС подключают к однофазной сети питания повышенного напряжения и частоты. Обмотку управления подключают к выходу регулятора уровня напряжения, на вход которого подается указанное напряжение сети, сдвинутое на 90 градусов (сдвиг по времени).
17. Регулировку уровня напряжения (скорости вращения магнитного поля) осуществляют, используя сигнал от датчика полного давления (см. ф.10 и 11). При этом чем выше сигнал датчика, тем больше напряжение на обмотке управления (выше скорость поля). В качестве регулятора возможно использование четырехполюсника с регулируемым внутренним сопротивлением.
18. При фазовом режиме управления обмотку возбуждения ОС подключают к однофазной сети повышенного напряжения и частоты. Обмотку управления подключают, к выходу фазосдвигающего устройства, имеющего регулируемый сдвиг по фазе. На обмотку управления подают постоянное по амплитуде напряжение, приведенное значение которого равно напряжению возбуждения.
19. Регулировку фазового сдвига (скорости вращения магнитного поля) осуществляют, используя сигнал от датчика полного давления. При этом, имея сдвиг по фазе 90 градусов, получаем круговое поле и наибольшую скорость.
20. При амплитудно-фазовом режиме управления обмотку возбуждения через фазосдвигающую емкость подключают к однофазной сети с повышенным напряжением и частотой. Обмотку управления подключают к выходу регулятора уровня напряжения, запитываемого от указанной сети (2, с.128-130).
Примечание. Во всех режимах РУ запитывается аналогично ОС. Система электродов, обслуживающих пространство ОВ, лежит в одной плоскости и запитывается аналогично ОВ. Система электродов, обслуживающих пространство ОУ, лежит в другой плоскости, параллельной первой, и запитывается аналогично ОУ. Плоскости расположены перпендикулярно оси движения аппарата. Сила разрядного тока ограничивается балластными сопротивлениями.
Сущность изобретения, соответствующая п.п. формулы, заключается в следующем.
1. Способ для создания силы упора состоит из действий. С помощью многофазной электромагнитной системы, имеющей симметрию относительно оси вращения, равные фазные напряжения, равный и постоянный сдвиг по фазе между ними создают вращающееся магнитное поле. Отличия от распространенного асинхронного способа следующие. Магнитное поле выводят на внешнюю поверхность статора. Совмещают ось вращения магнитного поля с продольной осью симметрии объекта. Совмещают вершины зубцов статора внешней поверхностью объекта. Раскручивают магнитное поле до необходимой скорости. Создают необходимую магнитную напряженность в пограничном слое среды. Располагают перед статором РУ так, чтобы вершины его контактов соприкасались с пограничным слоем, а электрический разряд происходил в поперечном движению направлении. Ориентируют РУ относительно статора так, чтобы между ними был необходимый зазор, а контакты располагались напротив зубцов. Подают на контакты электрическое напряжение, величина и мощность которого определяются электропроводностью среды. При необходимости ограничивают силу тока через контакты и синхронизируют работу РУ с вращением магнитного поля ОС. Производят электрический разряд в пограничном слое, ПС. Насыщают ПС свободными зарядами. Магнитным полем отодвигают свободные заряды и присоединенную массу от поверхности объекта. Над зубцовой зоной ОС и контактами РУ устанавливают магнитный шунт-отражатель с зазором. Величина зазора, форма и угол наклона отражающей поверхности шунта определяются необходимым направлением силы упора. Отражательную поверхность покрывают защитным слоем.
2. Способ по п.1, отличающийся тем, что на объекте устанавливают несколько комплектов ОС и РУ. При этом магнитные поля ОС в двух смежных комплектах могут вращаться в противоположных направлениях, что компенсирует силовую асимметрию. Некоторые комплекты могут состоять только из ОС или РУ.
3. Способ по п.1, отличающийся тем, что магнитное поле ОС перемещают по кривой, отличной от окружности, например, по эллиптической. При этом кривая может быть незамкнутой, a движения повторяться. Электрическое поле РУ может перемещаться аналогично.
4. Способ по п.1, отличающийся тем, что магнитное поле ОС перемещают по ограниченной прямой, повторяя это движение. Электрическое поле РУ может перемещаться аналогично. При этом магнитные поля ОС в двух смежных комплектах могут перемещаться в противоположных направлениях.
5. Способ для создания силы упора при переменной скорости вращения магнитного поля состоит из действий. С помощью двухфазной электромагнитной системы, имеющей обмотку возбуждения и обмотку управления, создают вращающееся магнитное поле. При этом обмотки распределены по статору и сдвинуты относительно друг друга на 90 электрических градусов. К статору придаются схемы управления, позволяющие иметь следующие режимы регулирования скорости вращения магнитного поля: амплитудный, фазовый и амплитудно-фазовый. Способ отличается тем, что магнитное поле выводят на внешнюю поверхность статора. Совмещают ось вращения магнитного поля с продольной осью симметрии объекта. Обращают вершины зубцов статора наружу и совмещают их с внешней поверхностью объекта. Ярмо и зубцовую зону меняют местами. Обмотки укладывают снаружи и покрывают поверхность статора защитным слоем, обладающим свойствами тепло-, электро- и гидроизоляции, а также немагнитными. При использовании магнитного шунта-отражателя отпадает необходимость получить наибольшее количество пар полюсов, наименьшее межполюсное расстояние и делать пазы и зубцы узкими, при этом возрастает лобовое сопротивление. Наматывают катушки полюсов так, чтобы после подключения к источнику электропитания повышенного напряжения и частоты вектор напряженности магнитного поля в переднем фронте был направлен от статора к шунту-отражателю. Корректируют величину напряженности магнитного поля (см. ф.13) в соответствии с изменением нормальной составляющей статического давления среды на корпус объекта, воздействуя на глубину отрицательной обратной связи усилителей мощности блока питания. Все перечисленное также относится и к п.1. Можно корректировать и скорость перемещения магнитного поля, воздействуя на регулятор уровня напряжения (амплитудный режим), на фазосдвигающее устройство (фазовый режим). При этом с увеличением нормальной составляющей статического давления среды должна увеличиваться напряженность магнитного поля в зазоре (увеличиваться напряжение, подаваемое на обмотку управления).
Действия относительно разрядного устройства РУ и шунта-отражателя ШО, перечисленные в п.1, также относятся и к п.5. Дополнительно (общее к п.1 и п.5) необходимо изложить следующее. При наличии ШО резко возрастает перпендикулярность вектора магнитной напряженности к внешней поверхности статора. Последнее обуславливает вредности наличия зарядов перед второй полуволной магнитного поля (при смене направления векторам напряженности заряды будут прижиматься к поверхности статора). Исключают заряды путем однополупериодного выпрямления напряжения питания РУ. Ориентируют электроды РУ относительно зубцов статора так, чтобы разряд происходил в течение первой полуволны магнитного поля с некоторым опережением.
Корректируют величину напряженности электрического поля между электродами в соответствии с изменением электропроводности среды. Измеряют электропроводность среды и напряжение на электродах. Сравнивают их значения с опытной зависимостью напряжения на электродах от электропроводности при постоянной и номинальной тяге (упоре). Выявляют величину и знак разницы. С учетом этого воздействуют, например, на глубину отрицательной обратной связи усилителя мощности, записывающего систему электродов РУ. При увеличении электропроводности напряжение на электродах должно уменьшаться. Перечень действий аналогичен и при корректировке от изменения нормальной составляющей статического давления среды с использованием опытной зависимости величины фазного, напряжения статора от статического давления при постоянном и номинальном значении тяги или упора.
6. Способ по п.5, отличающийся тем, что на объекте-носителе устанавливают несколько ОС, РУ и ШО. Их сочетание и взаимное расположение определяется конструктивными особенностями объекта. Магнитные поля ОС могу перемещаться в противоположных направлениях.
7. Способ по п.5, отличающийся тем, что магнитное поле ОС перемещают по кривой, отличной от окружности, например по эллиптической. При этом кривая может быть незамкнутой, а движения магнитного поля повторяться. Электрическое поле РУ может перемещаться аналогично.
8. Способ по п.5, отличающийся тем, что магнитное поле ОС перемещают по ограниченной прямой, повторяя это движение. Электрическое поле РУ может перемещаться аналогично. При этом магнитные поля двух смежных ОС могут перемещаться в противоположных направлениях.
9. Устройство для создания силы упора состоит из обращенного статора, ОС, разрядного устройства, РУ, и шунта-отражателя, ШО. Устройство ОС подобно устройству статора асинхронного двигателя. Имеются следующие различия: отсутствуют корпус и ротор, ярмо расположено внутри, а зубцовая зона снаружи, пазы глубокие, обмотка уложена снаружи, внешняя поверхность статора покрыта защитным слоем, ОС вмонтирован в корпус объекта так, что ось вращения магнитного поля совпадает с продольной осью симметрии объекта, вершины зубцов совпадают с внешней поверхностью объекта, фазные обмотки подключены к выходам усилителей мощности, имеющие регулируемые отрицательные обратные связи и входящие в блок питания с повышенным напряжением и частотой. Обратные связи через промежуточные узлы (реле и т.п.) связаны с переключателем, работающим как от руки оператора, так и от системы автоматического регулирования, подключенной к выходу измерителя статического давления и к выходам усилителей мощности.
РУ вмонтировано в корпус объекта перед статором с зазором. РУ может состоять из нескольких кольцевых систем электродов, расположенных поперек движения ПСС. Число систем равно числу фаз питания ОС. Возможна однорядовая система электродов. Между системами существует зазор. РУ может быть выполнено с помощью печатного монтажа в том числе и двухстороннего. Последовательно с электродами могут включаться сопротивления и диоды. Структура системы коррекции аналогична. Используется измеритель электропроводности среды.
Вместо систем контактов может применяться упрощенная однорядовая схема РУ без синхронизации с работой ОС.
Над зубцовой зоной ОС и контактами РУ с зазором установлен магнитный шунт-отражатель, ШО. Он имеет обтекаемую форму (профиль авиационный трапециевидный и т.п.). ШО выполнен из ферромагнитного материала. Величина нависания над РУ частичная, над ОС полная. Указанное позволяет осуществить продольное движение ПСС в режиме разгона. Величина зазора увеличивается по мере продвижения от РУ к ОС. Угол увеличения зазора, наклона отражательной поверхности ШО определяется допустимой величиной лобового сопротивления и углом расхождения корпуса объекта. В случав нулевого значения последнего угол увеличения зазора может составлять 45 град. Это приблизительная величина. Она требует экспериментального уточнения, так как является сложной функцией многих аргументов и в том числе характером (формой) магнитного поля. Отражательная поверхность ШО имеет покрытие, защищающее от разрушения ферромагнитный материал, подвергающийся воздействию свободных зарядов и присоединенной массы.
10. Устройство по п.9, отличающееся тем, что состоит из нескольких комплектов РУ, ОС и ШО. В каждый комплект входит по одному экземпляру РУ, ОС и ШО. Количество комплектов определяется необходимой мощностью устройства. Некоторые комплекты могут быть неполными, т.е. отсутствуют РУ, или ОС, или ШО. Для обеспечения противоположного вращения магнитного поля в смежных ОС должны быть соответствующие отличия в подключении их обмоток к фазам питания. При трехфазном питании две фазы меняются местами.
11. Устройство по п.9, отличающееся тем, что у кольцевой конструкции ОС, РУ и ШО отсутствует сектор.
12. Устройство по п.9, отличающееся тем, что поперечное сечение конструкции ОС, РУ и ШО имеет вид подобия прямоугольника.
13. Устройство для создания силы упора, включающее статор асинхронного управляемого двигателя и отличающееся следующим. ОС имеет отличительные признаки, аналогичные признакам п.9. Дополнительным отличием является наличие двух обмоток вместо трех и более. Обмотка возбуждения и обмотка управления распределены по зубцовой зоне статора и сдвинуты относительно друг друга на 90 электрических градусов. Обмотка возбуждения подключена к источнику электропитания повышенного напряжения и частоты. Обмотка управления подключена к выходу схемы управления, на вход которой подается сигнал от первичного измерителя нормальной составляющей полного давления набегающего потока. При этом схема управления подключена к указанному источнику электропитания, а ее структура определяется выбранным режимом управления.
РУ имеет отличительные признаки (конструктивные особенности), аналогичные признакам п.9. Дополнительным отличием является наличие двух систем (двух фаз). При синхронной работе ОС и РУ система контактов, обеспечивающая свободными зарядами пространство обмотки возбуждения, подключается к источнику электропитания повышенного напряжения и частоты. Система контактов электродов РУ, обеспечивающих свободными зарядами пространство обмотки управления, подключается к выходу схемы управления. При этом этот канал питания может иметь коэффициент передачи по напряжению, отличный от питания обмотки управления. Возможна постановка в каналы питания РУ регулятора коэффициента передачи по напряжению в зависимости от электропроводности среды. Регулирование может быть как ручным, так и автоматическим. В последнем случае используется система автоматического регулирования, работающая от первичного измерителя электропроводности.
ШО имеет отличительные признаки, аналогичные п.9.
14. Устройство по п.13 имеет отличия, аналогичные п.10.
15. Устройство по п.13 имеет отличия, аналогичные п.11.
16. Устройство по п.13 имеет отличия, аналогичные п.12. Вместо термина обращенный статор, ОС, введем термин развернутый статор, PC. В этом случае магнитное поле не вращается, а перемещается.
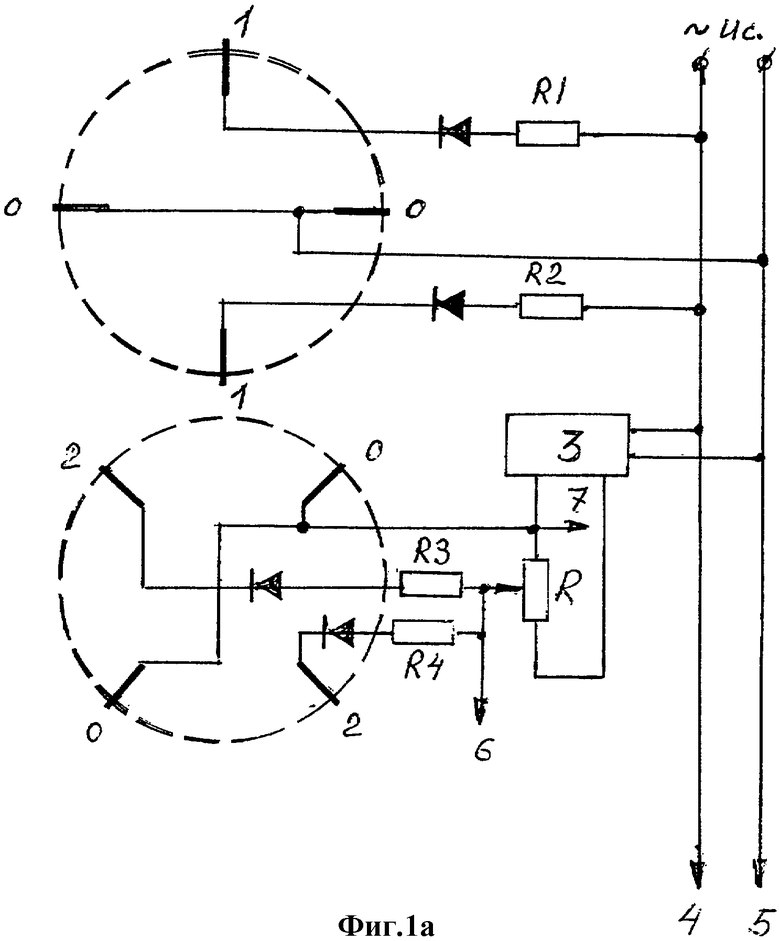
На фиг.1а упрощенно представлена схема РУ для кругового ОС, использующего амплитудный режим управлениям. ОС имеет 4 пары полюсов и 2 паза на полюс и фазу. ОС максимально упрощен, что способствует пониманию принципа работы РУ. Контакты имеют обозначения: 1, 2 и 0. Фазосдвигающее устройство, ФСУ (3), состоит из конденсатора, включенного последовательно в цепь питания регулятора, R. Последним может быть усилитель мощности, на вход которого подается напряжение от ФСУ, а с выхода снимается напряжение для РУ. Передаточный коэффициент усилителя изменяется путем изменения величины смещения на входе. Последнее осуществляется выходным сигналом от измерителя нормальной составляющей статического давления среды.
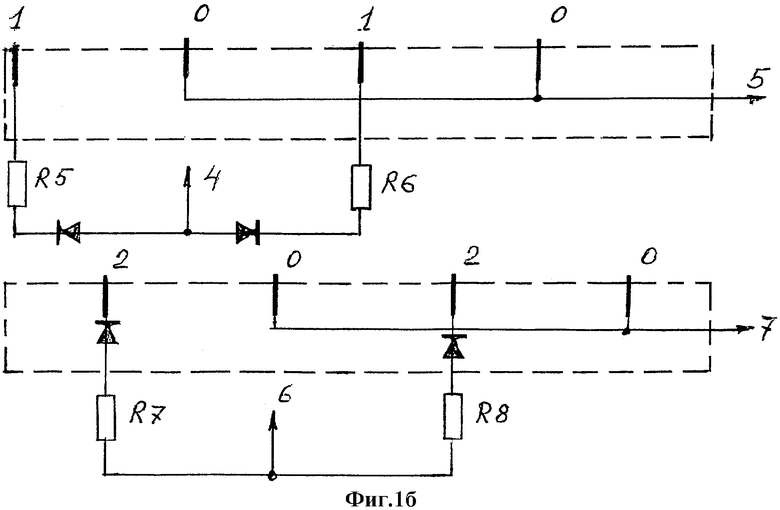
На фиг.1б упрощенно представлена схема РУ для PC, работающего на аналогичном режиме. Сравнивая схемы, можно заключить, что у PC РУ имеет меньшую площадь поверхности, охваченную разрядами. Имеет место неравномерность в обработке пограничного слоя разрядами и в загруженности электродов. При реализации режимов регулирования ОС, PC и РУ следует использовать тиристоры и схемы управления ими (7, с.155-158).
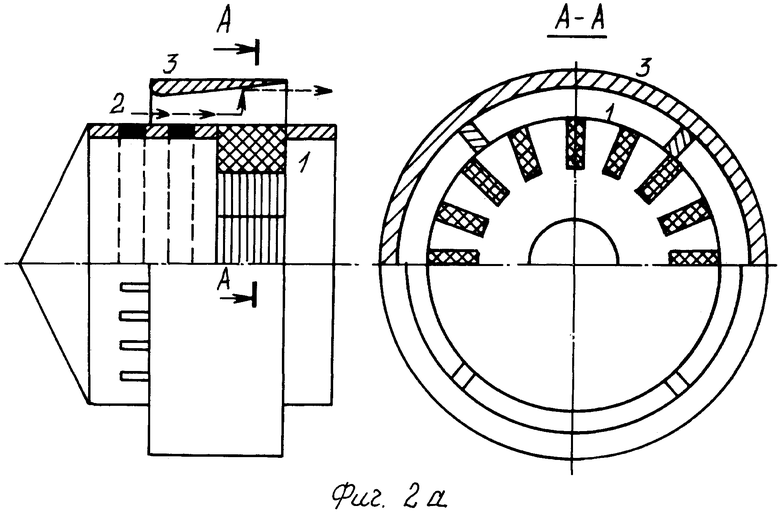
На фиг.2а представлена упрощенная конструкция кругового устройства для создания силы упора. При этом принято: угол расхождения носовой части объекта равен нулю и используется один комплект ОС, 1, РУ, 2, ШО, 3.
На фиг.2б представлена упрощенная конструкция развернутого в линейку устройства для создания силы упора. При этом принято, что используется один комплект РС, 4, РУ, 5 и ШО, 6.
В обоих случаях в РУ используется две системы контактов и управляемый режим работы ОС и PC.
Изложенная система создания силы упора является основой нового движителя, обладающего наибольшим КПД и надежностью (нет движущихся механических деталей). Такой движитель способен работать в воде, в воздухе и в безвоздушном пространстве. Для работы движителя необходимо следующее: электроэнергия, знание о величине электропроводности среды и знание о величине нормальной составляющей полного давления среды на корпус объекта. Перечисленное определяет необходимость наличия вспомогательных систем.
Система электропитания может состоять из солнечных батарей, заряжающих аккумуляторные батареи, электронного многофазного генератора и усилителей мощности. В некоторых случаях возможно использование аккумуляторных батарей, питающих двигатель постоянного тока, нагруженного синхронным трехфазным генератором.
Система измерения электропроводности среды может включать датчик, усилительно-преобразовательный блок и индикатор (указатель). Например, для измерения электропроводности морской воды возможно использование двухэлектродного платинового датчика, включенного в мостовую схему.
Система измерения давления среды может включать датчик, усилительно-преобразовательный блок и индикатор. Датчик может быть мембранного типа.
С помощью двух измерительных систем и специальных таблиц оператор в ручном режиме может установить необходимое напряжение на электродах РУ и необходимую скорость перемещения магнитного поля ОС или PC и электрического поля РУ. При этом учитывается выбранный режим регулирования скорости.
Возможен режим автоматического изменения как напряжения на электродах РУ, так и скорости перемещения полей ОС, PC и РУ.
Источники информации
1. Ермолин Н.П. Электрические машины малой мощности. - М.: Высшая школа, 1967.
2. Хрущев В.В. Электрические микромашины переменного тока для устройств автоматики. - Л.: Энергия, 1969.
3. Коварский Е.М., Янко Ю.И. Испытания электрических машин - М.: Энергоатомиздат, 1990.
4. Нейман Л.Р., Калантаров П.Д. Теоретические основы электротехники. - М. - Л.: Госэнергоиздат, 1959.
5. Яворский Б.М., Детлаф А.А. Справочник по физике. - М.: Госиздат, Физико-математическая литература, 1963.
6. Карякин Н.И. и др. Краткий справочник по физике. - М.: Высшая школа 1963.
7. Казьмерковский М., Вуйцак А. Схемы управления и измерения в промышленной электронике. - М.: Энергоатомиздат, 1983.

Изобретение относится к гидро- и аэродинамике объектов, находящихся и движущихся в пространстве. Движитель в виде статора асинхронного двигателя, который выполнен с зубцовой зоной на внешней стороне, способен фиксировать и перемещать объекты в пространстве независимо от характера среды. Это достигается воздействием на пограничный слой среды электрическим разрядом и перемещающимся магнитным полем. Отклоняющийся от корпуса пограничный слой, встречая преграду, создает силу упора. Технический результат заключается в снижении лобового сопротивления движущемуся объекту. 4 н. и 10 з.п. ф-лы, 4 ил.
| Устройство для снижения сопротивления трения движущегося в воде объекта | 1972 |
|
SU457629A1 |
| СПОСОБ СНИЖЕНИЯ ГИДРОДИНАМИЧЕСКОГО ТРЕНИЯ | 1994 |
|
RU2133891C1 |
| US 6079345, 27.06.2000 | |||
| DE 1956760 A1, 19.05.1971. | |||

