Изобретение относится к проблеме повышения поперечной устойчивости транспортного средства. Известен способ повышения поперечной устойчивости путем использования гироскопа с приводом и аппаратурой управления (См. кн. "Гироскопический эффект" В.А.Павлов, М., Судостроение, 1967 г., стр.181-193). Этот способ, принятый за прототип, имеет недостатки. Он сложен, дорог, имеет значительный вес, допустим только для одноколейных транспортных средств, требующих постоянной стабилизации.
Цель изобретения - упрощение конструкции транспортного средства, требующего лишь периодического повышения поперечной устойчивости, путем продольного расположения ротора, задания ротору нормальных средних оборотов вращения и получения стабилизирующего эффекта при повороте за счет ускорения или замедления скорости оборотов ротора, после прохождения поворота обороты ротора постепенно восстанавливаются до средних.
С этой целью в способе повышения поперечной устойчивости, состоящем из вращающегося ротора с приводом и аппаратурой управления, ось ротора расположена параллельно продольной оси транспортного средства (автомобиля), имеет среднюю нормальную скорость вращения, а при поворотах и уклонах обеспечивается соответствующее ускорение или замедление оборотов ротора.
Новыми отличительными признаками по сравнению с прототипом являются:
1. Ось ротора расположена параллельно продольной оси автомобиля.
2. Нормальная скорость оборотов ротора - средняя.
3. На поворотах и уклонах повышение устойчивости обеспечивается соответствующим ускорением или замедлением оборотов ротора.
На чертеже показан гибридный автомобиль (А.) с последовательной схемой силовой установки.
А. содержит ДВС 1, сцепление 2, генератор 3, электродвигатель 4 ведущего колеса 5, ведомые управляемые колеса 6 с датчиком скорости 7, рулевое колесо 8 с датчиком 9 угла его поворота, датчик крена 10, датчик 11 оборотов ротора генератора 3, компьютер 12, кузов 13.
Сущность способа. При прямолинейном движении А. ДВС 1 работает на средних оборотах (на оборотах максимальной экономичности топлива или на оборотах минимальной токсичности). Энергия генератора 3 используется для привода электродвигателя 4 ведущего колеса 5 и для подзарядки аккумулятора и конденсаторов. При повороте А. данные датчиков 7, 9, 10, 11 поступают в компьютер 12, который подает команду на определенной величины ускорение или замедление ДВС 1 или при разомкнутом сцеплении 2 генератора 3.
Поворот-маневр сравнительно кратковременный, в этот промежуток времени происходит увеличение или уменьшение оборотов ротора генератора 3 (ротора 3), в исключительных случаях до максимальных или минимальных оборотов ДВС 1. После поворота идет постепенное восстановление оборотов ротора 3 до средних.
Например, при виде сзади на А. (см. чертеж) ротор генератора 3 (совместно с коленвалом ДВС 1 и дисками сцепления 2) вращается по часовой стрелке. При правом повороте А. действующая на кузов 13 центробежная сила инерции направлена от центра тяжести (Ц.Т.) влево и стремится повернуть кузов 13 вокруг продольной оси А. против часовой стрелки. Но при замедлении скорости вращения ротора 3 его инерция через статор генератора 3 воздействует на кузов 13 и стремится повернуть его по часовой стрелке, что повышает боковую устойчивость А. При левом повороте А. повышение устойчивости достигается увеличением скорости вращения ротора 3.
Перед левым поворотом возможно предварительное снижение оборотов ротора 3 ручным способом или при включении поворотника для продолжительного и большего ускорения скорости его оборотов и прохождения А. поворота с большей скоростью или с меньшим радиусом.
Если предстоящий поворот правый, возможно предварительное повышение оборотов ротора 3. При наезде на уклон правым бортом А. срабатывает датчик уклонов 10 и компьютер 12 замедляет скорость вращения ротора 3. При наезде на уклон левым бортом А. скорость вращения ротора 3 увеличивается.
Динамический стабилизирующий момент ротора 3 - Мдин.ст. зависит от его момента инерции - Jр и величины его углового ускорения (замедления) -  :
:
 .
.
Для лучшей стабилизации А. центры тяжести кузова 13 и ротора 3 должны быть расположены рядом. Повышение поперечной устойчивости актуально для трициклов, обладающих малой боковой устойчивостью.
Гироскопический момент ротора 3 при повороте дополнительно нагружает передние или задние колеса. При симметричной 4- или 3-колесной схеме расположения колес А. направление вращения ротора 3 может быть любое.
Ротор 3, вращающийся от средних оборотов ДВС 1 до его максимальных и минимальных оборотов, обеспечивает различное воздействие на А. при левом и правом поворотах. Эти различия возможно использовать на трициклах мотоциклетного (несимметричного) типа, боковая устойчивость которых различна. При вращении ротора 3 против часовой стрелки, при более опасном правом повороте гироскопический момент ротора 3 дополнительно нагружает задние колеса А., при ускорении скорости вращения ротора 3 динамический стабилизирующий момент Мдин.ст. направлен по часовой стрелке, все это повышает устойчивость такого трицикла.
При наличии ручного параллельного управления оборотами ротора 3 возможно разгрузить (облегчить) один борт (при внезапном обнаружении ямы перед колесом).
При снабжении А. датчиками рельефа пути способ возможно использовать для активной стабилизации поперечных угловых перемещений кузова 13 при прямолинейном движении.
Способ динамической стабилизации А. гармонично развивает конструкцию гибридных А. Способ прост, надежен, имеет малый вес, повышает активную безопасность А.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2452634C2 |
| ТРИЦИКЛ | 2002 |
|
RU2264322C2 |
| ТРИЦИКЛ | 2005 |
|
RU2302970C2 |
| КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2355597C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2081777C1 |
| ДВУХТАКТНЫЙ ДВС | 2001 |
|
RU2206758C2 |
| КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2352491C2 |
| ФОНАРЬ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2440253C1 |
| КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2331542C1 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2245256C2 |
Изобретение относится к области автомобильного транспорта, а именно к устройствам стабилизации транспортного средства. Стабилизация транспортного средства, которое содержит вращающийся ротор с приводом и системой регулирования оборотов вращения, происходит путем соответствующего увеличения или уменьшения оборотов ротора, осуществляемом системой регулирования. Ось вращающегося ротора расположена параллельно оси транспортного средства. Достигается повышение поперечной устойчивости транспортного средства. 1 ил.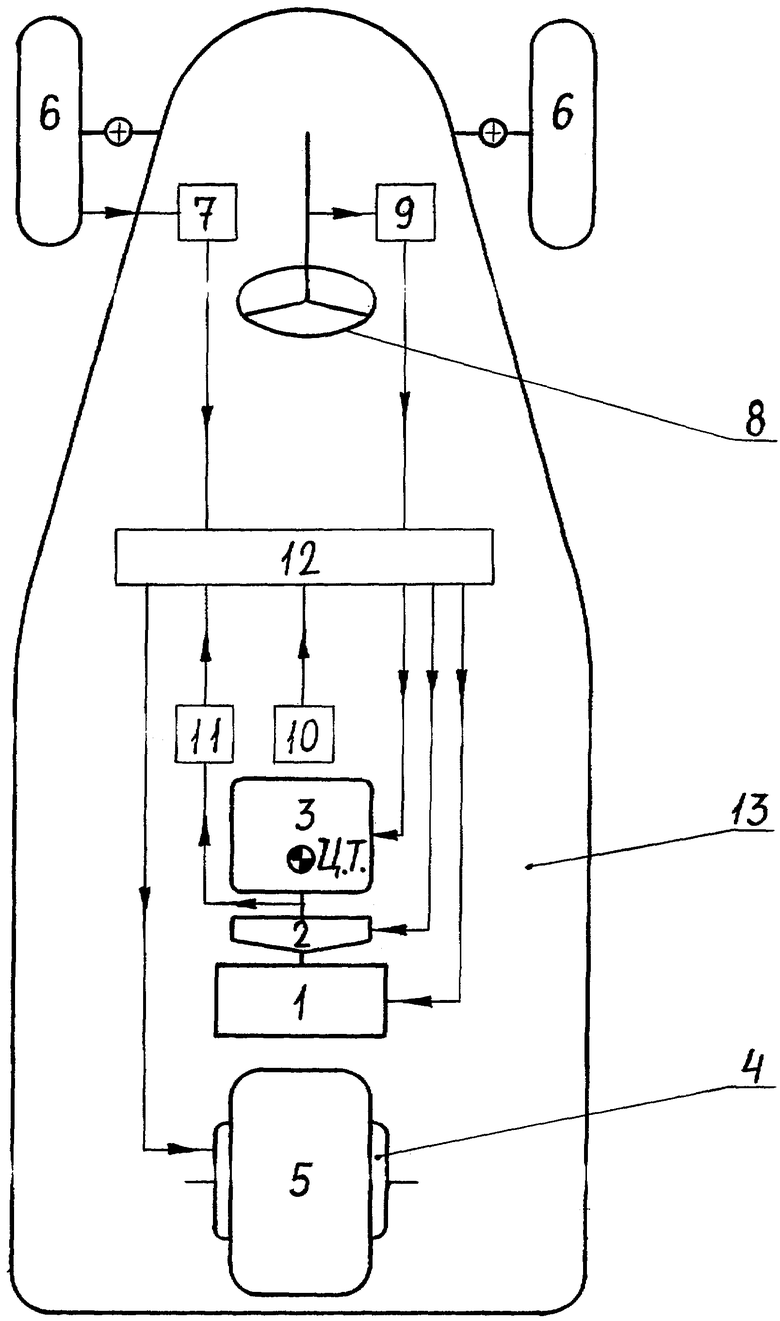
Способ стабилизации транспортного средства, содержащего вращающийся ротор с приводом и системой регулирования оборотов вращения, заключающийся в том, что ось ротора расположена параллельно оси транспортного средства, ротор имеет определенную скорость вращения при прямолинейном движении, а при поворотах и на уклонах происходит соответствующее увеличение или уменьшение оборотов ротора, осуществляемое системой регулирования.
| В.А.Павлов "Гироскопический эффект" | |||
| - Л.: Судостроение, 1967, стр.181-193 | |||
| Устройство стабилизации транспортного средства | 1985 |
|
SU1255500A1 |
| US 5601346 А, 11.02.1997 | |||
| JP 56060780 А, 25.05.1981 | |||
| FR 1527982 А, 07.06.1968 | |||
| Устройство для повышения устойчивости транспортного средства | 1984 |
|
SU1230909A1 |

