Изобретение относится к транспортному машиностроению, в частности к устройствам, повышающим безопасность эксплуатации транспортных средств.
Цель изобретения - повышение поперечной динамической устойчивости транспортных средств.
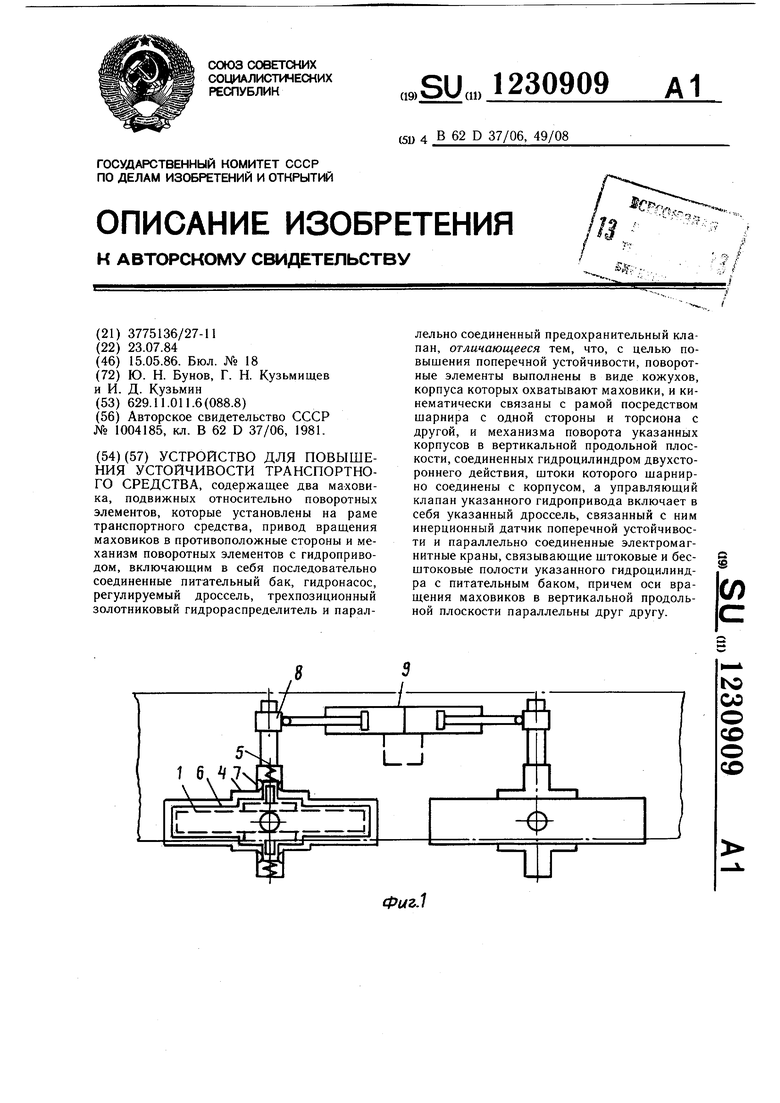
На фиг. 1 показана конструкция устройства, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, функциональная схема; на фиг. 4 - гидравлическая схема устройства.
Устройство включает установленные на раме транспортного средства, приводимые в движение синхронными электродвигателями два маховика 1, наружной рамкой подвеса которых является рама транспортного средства 2, в которой расположены внутренние рамки подвеса, оси которых с одной стороны соединены посредством шлице- вого соединения с торсионами 3, с другой - шарнирно связаны с рамой 2. При этом каждая рамка подвеса содержит наружный корпус 4, выполненный в виде кожуха, внутри которого через направляющие втулки и пружинные амортизаторы 5 помещен внутренний корпус 6, имеющий возможность перемещаться относительно наружного корпуса 4 во втулках 7. Наружные корпуса 4 внутренних рамок подвеса в верхней части щарнирно, посредством кулисного механизма 8 соединены со штоками закрепленного на поперечной балке рамы 2 гидроцилиндра 9 двухстороннего действия.
Гидроцилиндр 9 связан с гидронасосом 10 через управляющий клапан 11, включающий регулируемый дроссель 12, щток которого соединен с инерционным датчиком 13, два параллельно соединенных электромагнитных крана 14, электромагниты которых соединены с источником тока через контактные пары датчика 13, и трехпо- зиционный четырехходовой электромагнитный кран 15 со встроенным гидрозамком, электромагниты которого также соединены с источником тока через контактные пары датчика 13.
Гидросистема предлагаемого устройства содержит питательный бак 16 для рабочей жидкости, фильтр 17 и предохранительный клапан 18.
Устройство работает следующим образом.
При движении, например, на крутом повороте транспортного средства на последнее действует опрокидывающий момент, при этом инерционная масса датчика 13 под действием центробежной силы отклоняется и приводит во вращение шток дросселя 12, изменив его проходное сечение. При отклонении инерционной массы датчика 13 замыкаются также соответствующие контактные пары (левая или правая), что приводит к включению соответствующего (левого или правого) электромагнита крана
гидрораспределителя 15 и выключению соответствующего электромагнитного крана 14. Например, включен левый электромагнит крана и выключен левый электромагнитный кран 14 - рабочая жидкость подается через левую гидролинию крана в штоко- вые полости гидроцилиндра 9, а его поршневые полости соединяются с линией слива в бак 16. Основной слив осуществляется через кран гидрораспределителя 15,
а частичный - через включенный правый электромагнитный кран 14.
Под действием давления рабочей жидкости порщни со щтоками приходят в движение и отклоняют внутренние рамки подвеса маховиков 1 на требуемый угол, торсионы 3 при этом закручиваются. При отклонении внутренних рамок создается суммарный стабилизирующий гироскопический момент, приложенный к раме транспортного средства и направленный встречно опроQ кидывающему моменту.
Величина стабилизирующего гироскопического момента наряду с частотой вращения маховиков и их размерами определяется также скоростью отклонения внутренних рамок подвеса, которая зависит от расхода
5 рабочей жидкости, подаваемой в гидроцилиндр, а расход зависит от величины проходного сечения дросселя управляющего клапана, на который воздействует инерционная масса датчика.
После того, как центробежная сила, действующая на транспортное средство, уменьщится до нуля, датчик 13 возвращается в исходное состояние. Вследствие размыкания одной контактной пары включается левый электромагнит крана 15, а за счет замыкания другой контактной пары
включается левый электромагнитный кран 14. Прекращается подача рабочей жидкости через кран 15, а гидрозамок запирает гидролинии. Поршневые и щтоковые полости гидроцилиндра 9 сообщаются с ба0 ком 16 через включенные электромагнитные краны 14.
Под действием торсионов 3 поршни со штоками гидроцилиндра 9 возвращаются в исходное положение. Жидкость из што- ковых полостей гидроцилиндра 9 через от5 крытый левый кран 14 поступает в бак 16, а в порщневые полости при этом жидкость поступает из бака 16 через открытый правый кпан 14.
Краны имеют такой номинальный расход, что обеспечивается относительно медленное
движение поршней гидроцилиндра 9 при приведении их в исходное положение, следовательно угловая скорость возвращения маховиков в исходное положение незначительна как и гироскопический момент, создаваемый
г при этом маховиками.
При заезде колес одного борта транспортного средства на препятствие работа устройства будет аналогична вышеизложенному.
0
Фиг.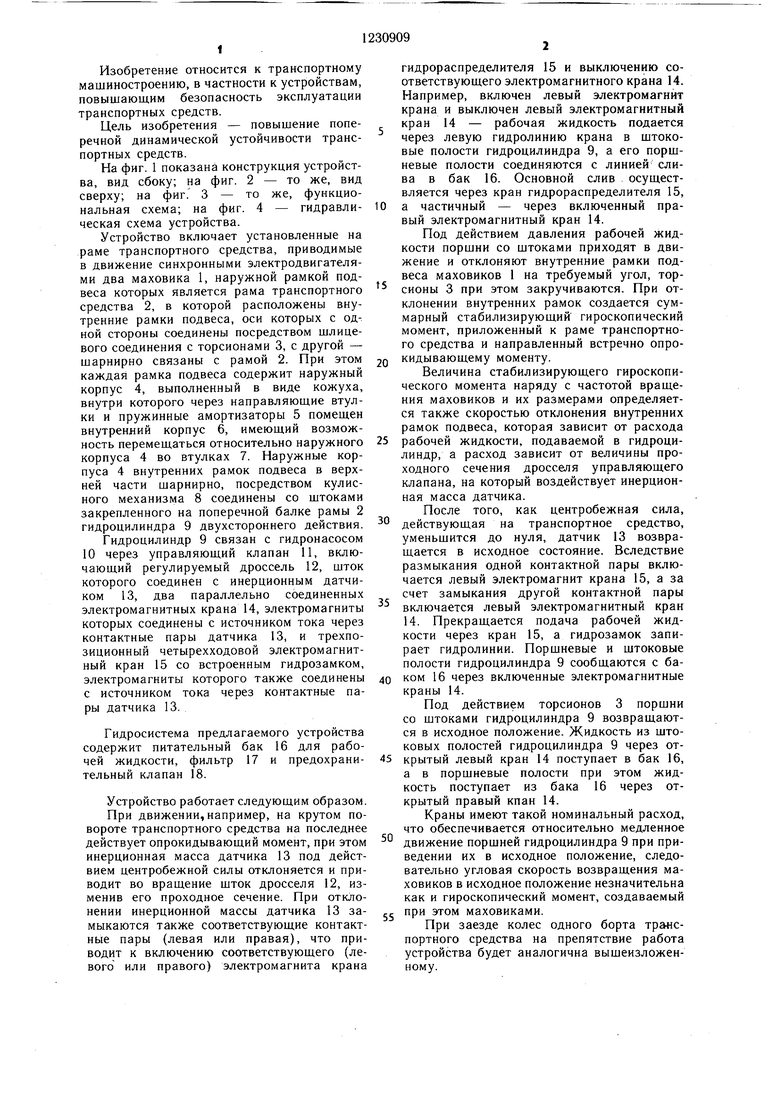
| название | год | авторы | номер документа |
|---|---|---|---|
| НАБЛЮДАТЕЛЬНЫЙ ПРИБОР СО СТАБИЛИЗАЦИЕЙ И ЦИФРОВОЙ ФОТОРЕГИСТРАЦИЕЙ | 2010 |
|
RU2442199C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Устройство для стабилизации транспортного средства | 1981 |
|
SU1004185A1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2599075C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО НА ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКЕ | 1982 |
|
SU1108670A1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| Гидропневмодвигатель внутреннего сгорания | 2021 |
|
RU2774925C1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |

Ф14г.д
| Устройство для стабилизации транспортного средства | 1981 |
|
SU1004185A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
