Настоящее техническое предложение посвящено решению проблемы доставки с подводной станции на поверхность воды цилиндрического модуля при сильных подводных течениях, причем продольная ось модуля должна быть вертикальной при его выходе на поверхность воды.
При выходе модуля за верхний срез стартовой трубы скоростной боковой напор течения воды вызывает существенное отклонение продольной оси модуля от вертикали, что значительно ухудшает стабилизацию модуля у поверхности воды.
Известно устройство подводной станции для эвакуации на поверхность воды цилиндрического модуля, содержащее систему управления, пусковую трубу с цилиндрическим модулем, узел формирования каверны в виде газогенераторов, установленных у верхнего среза пусковой трубы (см., например, патент RU 2207294).
Недостаток этого устройства состоит в том, что до использования его на объекте требуется большой объем отработки и затрат.
С целью упрощения конструкции, уменьшения затрат и повышения надежности стабилизации продольной оси модуля в вертикальном направлении при выходе модуля на поверхность воды предлагается перед кольцевым крылом модуля в его хвостовой части на наружной поверхности по периметру установить несколько щитков, связанных с модулем через оси вращения, на которых установлены возвратно-поджимные пружины, а для каждого щитка внутри хвостовой части модуля в отдельном блоке размещены стопорный механизм и толкательный механизм, при этом стопорный механизм выполнен в виде двух взаимно перпендикулярных рычагов, жестко связанных между собой и соединенных с блоком через подпружиненную ось, а толкательный механизм выполнен в виде цилиндра с подпружиненным поршнем и установленным над поршнем внутри цилиндра пирозапалом, при этом один рычаг упирается в поршень, а другой рычаг, выполненный с защелкой-фиксатором, удерживает щиток.
От системы управления задействуются определенные щитки, которые раскрываются навстречу вектору скорости бокового подводного течения после выхода модуля за срез пусковой трубы и создают компенсирующий момент вращения вокруг центра масс модуля для выравнивания продольной его оси.
Модуль подводной станции для эвакуации на поверхность воды поясняется чертежами:
фиг.1 - продольный разрез модуля при движении в воде,
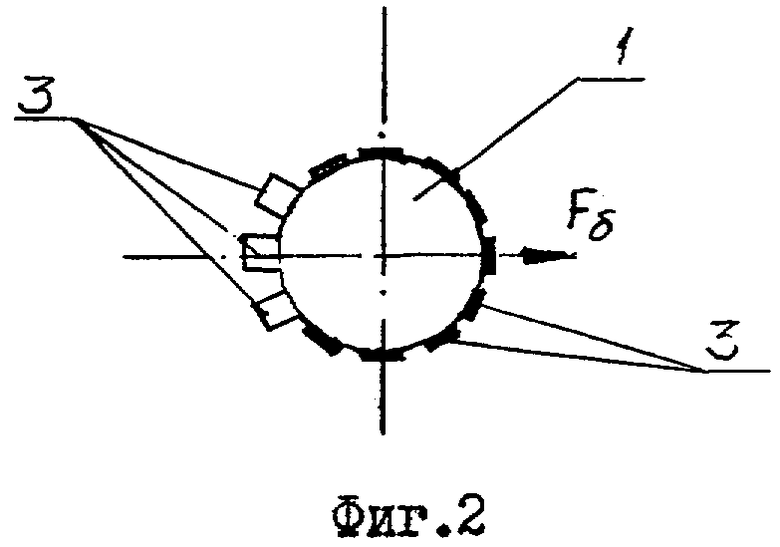
фиг.2 - поперечный разрез модуля при движении в воде,
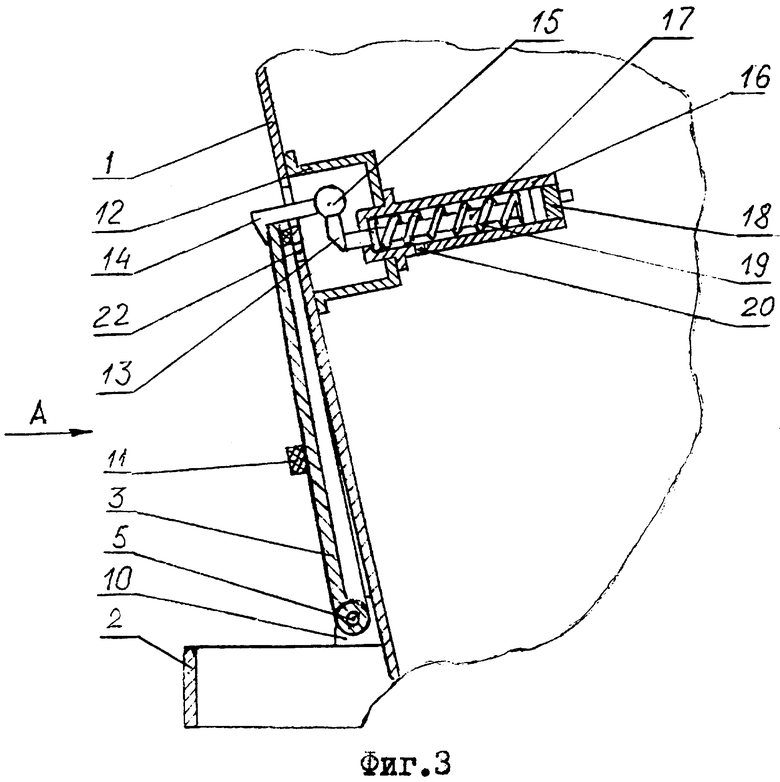
фиг.3 - продольный разрез хвостовой части модуля с установленным щитком, с блоком стопорного и толкательного механизмов,
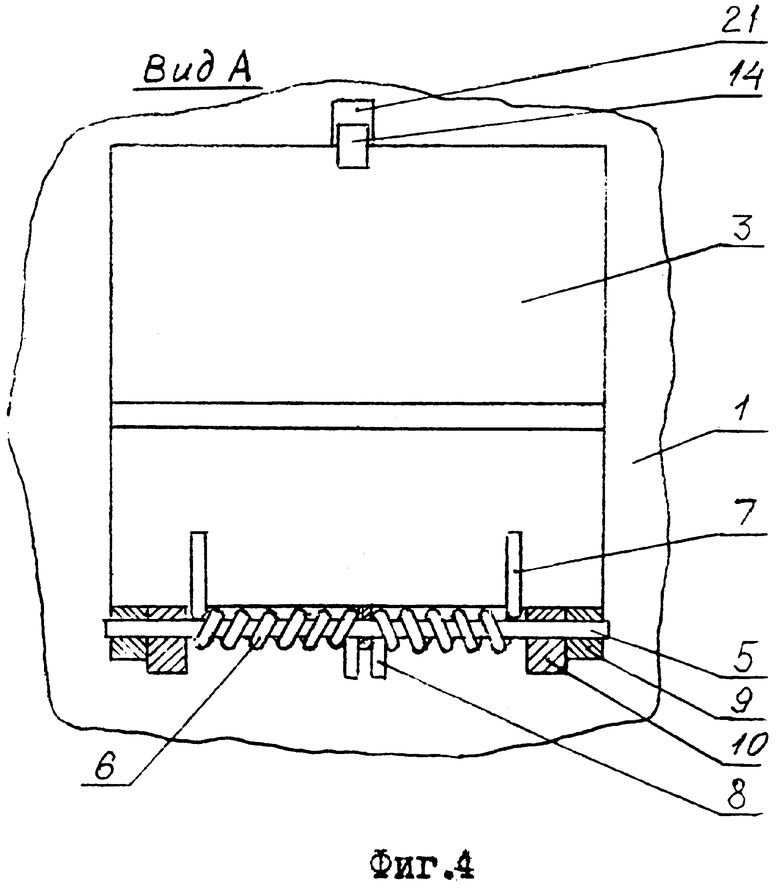
фиг.4 - вид с внешней стороны щитка в исходном положении,
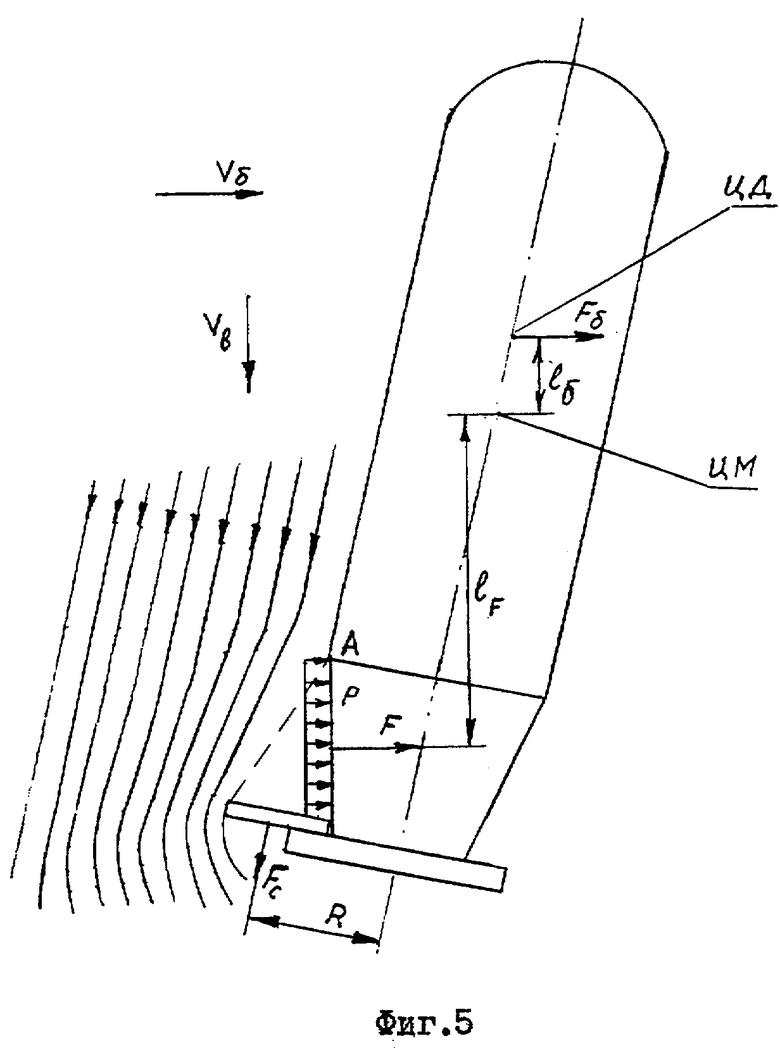
фиг.5 - схема действия сил при движении модуля в воде с открытым щитком.
Модуль подводной станции для эвакуации на поверхность воды содержит цилиндрический корпус 1 с кольцевым крылом 2 (фиг.1), щитки 3. Модуль выталкивается из стартовой трубы 4 подводной станции. На фиг.2 показаны три раскрытых щитка 3 навстречу боковому течению воды, другие щитки остаются в исходном положении. Количество раскрытых щитков зависит от величины вектора скорости бокового подводного потока.
На фиг.3 щиток 3 на хвостовой части модуля показан в исходном состоянии. Щиток связан с модулем через ось вращения 5, на которой установлены возвратно-поджимные пружины 6 (см. фиг.4), один конец 7 пружины касается наружной поверхности щитка, а другой конец 8 пружины касается наружной поверхности корпуса модуля. Ось 5 проходит через проушины 9 щитка и цапфы 10 корпуса модуля. Пружины 6 с определенным усилием поджимают щиток 3 в исходном состоянии к поверхности корпуса модуля 1. На наружной поверхности щитка имеется амортизатор 11, выполненный, например, из резины, который смягчает удар о переднюю кромку кольцевого крыла 2 при раскрытии от воздействия скоростного напора воды.
Внутри хвостовой части корпуса модуля для каждого щитка в отдельном блоке 12 размещены стопорный механизм и толкательный механизм. Стопорный механизм выполнен в виде двух взаимно перпендикулярных рычагов 13 и 14, жестко связанных между собой и соединенных с блоком 12 через подпружиненную ось 15. Толкательный механизм выполнен в виде цилиндра 16 с подпружиненным поршнем 17. Над поршнем внутри цилиндра установлен пирозапал 18, соединенный с системой управления модулем. Пружина 19 возвращает поршень 16 после срабатывания пирозапала и истечения продуктов сгорания через отверстие 20 в цилиндре 16 в первоначальное положение. Рычаг 13 упирается в поршень 17. Рычаг 14 выполнен в виде защелки-фиксатора с Г-образным концом с внешним скосом для плавного возвращения щитка 3 под "защелку" в исходное положение. В корпусе 1 имеется щель 21 для свободного прохода защелки-фиксатора 14, а также имеется отверстие 22 для свободного прохода поршня 17 к щитку 3, чтобы отклонить его на заданный угол, предварительно освободив от защелки-фиксатора 14.
На фиг.5 показана схема действующих сил и моментов при движении модуля. Боковая сила Fб (от бокового скоростного напора воды), проходящая через центр давления (ЦД), создает опрокидывающий момент Mб=Fб·lб, где lб - расстояние от центра давления до центра масс (ЦМ) модуля.
Парирующая сила F от щитка создает парирующий момент Mп=F·lF, где lF - плечо до ЦМ от равнодействующей силы F, которая возникает от избыточного давления перед щитком Δр.
Область торможения потока перед щитком отделена от невозмущенного потока конической поверхностью, которая отходит от внешней кромки щитка и замыкается на корпусе модуля в точке отрыва А.
Парирующий момент Мп увеличивается на ≈10% за счет силы сопротивления щитка Fc на плече R (см., например, статью: Г.Ф.Король. "Методика расчета действующего момента при движении асимметричного тела в воде". М., Труды МИТ, том 7, часть 1, 2004).
Сила F от одного щитка в зависимости от скоростного напора определяется (подтверждается) опытным путем на моделях, а затем результаты используют для конкретного проектирования.
Модуль работает следующим образом. По команде от системы управления, куда вводятся данные по величине вектора скорости течения воды, задействуются один или более щитков со стороны, обращенной к вектору скорости течения воды. Команда в виде электрического импульса подается на пирозапал 18. Под действием продуктов сгорания от пирозапала поршень 17 выходит из цилиндра 16 и, действуя на рычаг 13 стопорного механизма, освобождает щиток 3 от зацепления с защелкой-фиксатором 14. При дальнейшем поступательном движении поршень 17 проходит в отверстие 22 в корпусе (стенке) модуля и приоткрывает щиток 3 на заданный угол от корпуса модуля. Продукты сгорания пирозапала 18 после выдвижения поршня "стравливаютя" через отверстие 20 цилиндра 16, и под действием сжатой пружины 19 поршень 17 возвращается в первоначальное положение, освобождая рычаг 13, а пружина оси 15 возвращает защелку-фиксатор 14 в исходное положение.
Под действием силы набегающего вертикального потока воды приоткрытый щиток 3 раскрывается до упора амортизатором 7 в переднюю кромку кольцевого крыла 2. При этом пружина 6 скручивается, а после прекращения действия напора у поверхности воды щиток 3 под действием усилия пружины возвращается в первоначальное (исходное) положение, отодвигая по внешнему скосу Г-образный рычаг 14, который под действием пружины оси 15 возвращает защелку-фиксатор 14 в зацепление со щитком 3.
Таким образом, продольная ось модуля при выходе на поверхность воды будет близка к вертикали.
С предлагаемым устройством проведены модельные испытания с положительным результатом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСКРЫТИЯ РУЛЕЙ БЛОКА РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2237598C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ РАКЕТЫ ПРИ ПОДВОДНОМ СТАРТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532287C1 |
| РОТОР ВЕРТИКАЛЬНО-ОСЕВОГО ВЕТРОДВИГАТЕЛЯ | 1992 |
|
RU2034169C1 |
| КОДОВЫЙ ЗАМОК | 1996 |
|
RU2111328C1 |
| ПНЕВМАТИЧЕСКОЕ РУЖЬЕ ДЛЯ ПОДВОДНОЙ ОХОТЫ | 1999 |
|
RU2148771C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2004 |
|
RU2258897C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ РАКЕТЫ ПРИ ПОДВОДНОМ СТАРТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2607126C1 |
| УСТРОЙСТВО РАСКРЫТИЯ И ФИКСАЦИИ СТАБИЛИЗИРУЮЩЕЙ ПОВЕРХНОСТИ ОТДЕЛЯЕМОГО ЭЛЕМЕНТА РАКЕТЫ | 1976 |
|
SU630968A1 |
| ОТКИДНОЙ КОНЦЕВОЙ ОТВОДНОЙ ЩИТОК КУКУРУЗОУБОРОЧНОЙ ПРИСТАВКИ К ЗЕРНОУБОРОЧНОМУ КОМБАЙНУ | 2008 |
|
RU2468564C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
Модуль подводной станции для эвакуации на поверхность воды содержит цилиндрический корпус с кольцевым крылом в хвостовой части корпуса и систему управления. Перед кольцевым крылом на наружной поверхности модуля по периметру установлено несколько щитков, связанных с модулем через оси вращения, на которых расположены возвратно-поджимные пружины. Для каждого щитка внутри хвостовой части модуля в отдельном блоке размещены стопорный механизм и толкательный механизм, при этом стопорный механизм выполнен в виде двух взаимно перпендикулярных рычагов, жестко связанных между собой и соединенных с блоком через подпружиненную ось, а толкательный механизм выполнен в виде цилиндра с подпружиненным поршнем и установленным над поршнем внутри цилиндра пирозапалом. Один рычаг стопорного механизма упирается в поршень, а другой рычаг выполнен с защелкой-фиксатором, удерживающей щиток. Такое выполнение модуля позволяет исключить влияние бокового течения на модуль, упростить конструкцию, уменьшить затраты и повысить надежность стабилизации продольной оси модуля в вертикальном направлении при выходе модуля на поверхность воды. 5 ил.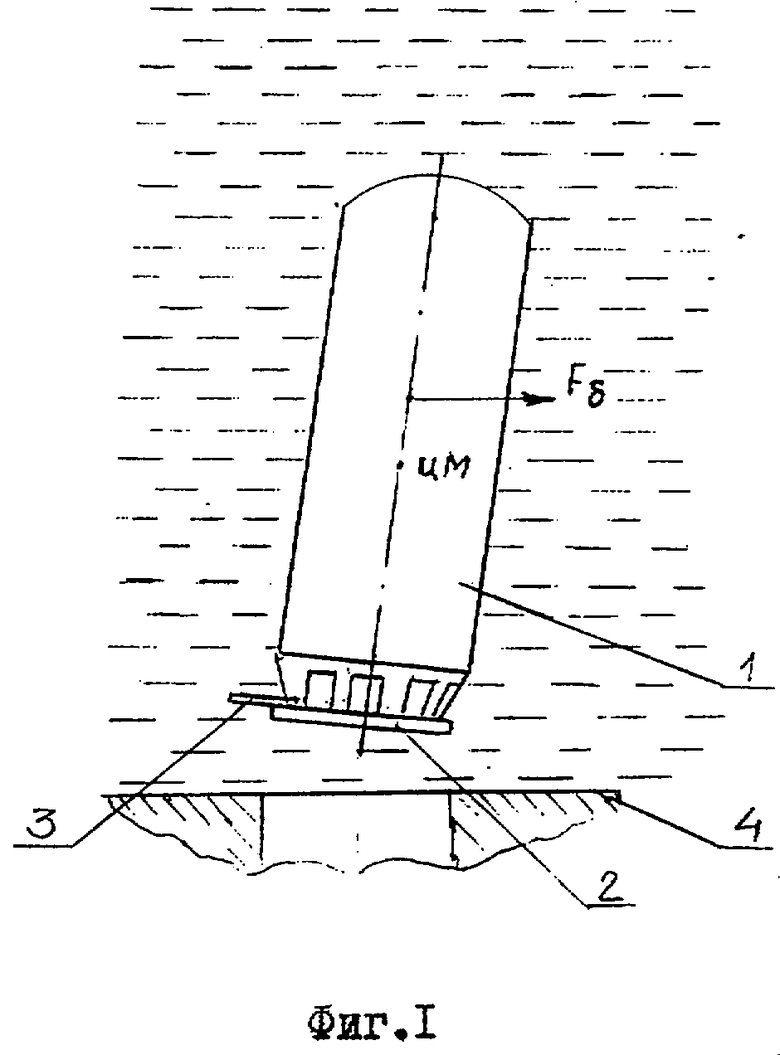
Модуль подводной станции для эвакуации на поверхность воды, содержащий цилиндрический корпус с кольцевым крылом в хвостовой части корпуса и систему управления, отличающийся тем, что перед кольцевым крылом на наружной поверхности модуля по периметру установлено несколько щитков, связанных с модулем через оси вращения, на которых расположены возвратно-поджимные пружины, а для каждого щитка внутри хвостовой части модуля в отдельном блоке размещены стопорный механизм и толкательный механизм, при этом стопорный механизм выполнен в виде двух взаимно перпендикулярных рычагов, жестко связанных между собой и соединенных с блоком через подпружиненную ось, а толкательный механизм выполнен в виде цилиндра с подпружиненным поршнем и установленным над поршнем внутри цилиндра пирозапалом, при этом один рычаг стопорного механизма упирается в поршень, а другой рычаг выполнен с защелкой-фиксатором, удерживающей щиток.
| СПОСОБ ЭВАКУАЦИИ НА ПОВЕРХНОСТЬ ВОДЫ ЦИЛИНДРИЧЕСКОГО МОДУЛЯ С ПОДВОДНОЙ СТАНЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207294C2 |
| УСТРОЙСТВО ДЛЯ ЭВАКУАЦИИ ИЗ ПОДВОДНОЙ СТАНЦИИ НА ПОВЕРХНОСТЬ ВОДЫ ЦИЛИНДРИЧЕСКОГО МОДУЛЯ | 2003 |
|
RU2252896C2 |
| US 51499906 A, 22.09.1992 | |||
| DE 3940583 A1, 13.06.1991. | |||

