Изобретение относится к области ракетной техники, в частности к управляемым ракетам с подводным стартом с движущегося носителя, и обеспечивает стабилизацию движения ракеты на подводном и воздушном участках траектории после выхода ракеты из транспортно-пускового контейнера (ТПК).
Изобретение может найти свое применение как на крылатых, так и на баллистических ракетах, стартующих из-под воды с движущихся носителей.
Известны способ и устройство для стабилизации движения морской баллистической ракеты на подводном участке траектории (патент РФ №2193155, ГРЦ «КБ им. акад. В.П. Макеева, 2000 г.). Способ стабилизации движения ракеты заключается в том, что после выхода ракеты из ТПК поворотные пластины пояса обтюрации, расположенного на хвостовом отсеке ракеты, разворачивают навстречу набегающему потоку воды и, при достижении пластинами заданного углового положения относительно корпуса ракеты, фиксируют конструктивными средствами. После выхода ракеты из воды по команде системы управления производят отделение пояса обтюрации от ракеты с целью уменьшения аэродинамического сопротивления на активном участке траектории. Устройство для осуществления способа содержит установленный на хвостовом отсеке ракеты пояс обтюрации из отдельных секций, состоящих из закрепленного на ракете основания и соединенной с ним шарнирно резинометаллической пластины, упирающейся свободным подпружиненным концом в стенку пусковой шахты. Каждая пластина соединена с основанием посредством оси и двух проушин, образованных на пластине. В проушинах выполнены отверстия для взаимодействия с фиксаторами, расположенными в корпусе основания.
Также существуют ракеты с раскрывающимися аэродинамическими поверхностями (крыльями, рулями, стабилизаторами), известны патенты: US 3650496, 1972 г.; US 3058422, 1962 г.; RU 2453799, 2012 г.; US 4296895, 1981 г.; RU 2520812, 2013 г. и другие. Наличие складываемых поверхностей в этих изобретениях обусловлено уменьшением габаритов при размещении ракет в ТПК, но при этом, ни один из предложенных вариантов изобретений не осуществляет своей задачи в воде - в условиях больших возмущающих моментов.
Наиболее близким по технической сущности к предлагаемому изобретению является прототип - патент RU №2532287, ОАО «ВПК «НПО машиностроения», «Способ стабилизации движения ракеты при подводном старте и устройство для его осуществления», 2013 г. Способ стабилизации движения ракеты при подводном старте сводится к обеспечению определенной последовательности работы механизмов устройства стабилизации, включающей начальную фиксацию в сложенном положении на корпусе стартово-разгонной ступени решетчатых стабилизаторов, их расфиксацию, синхронное раскрытие, демпфирование и фиксацию в раскрытом положении после выхода из транспортно-пускового контейнера, расфиксацию, складывание и фиксацию решетчатых стабилизаторов в сложенном положении и одновременное раскрытие маршевых рулей после выхода из воды, а после набора необходимой скорости - отделение стартово-разгонной ступени со сложенными стабилизаторами от корпуса ракеты.
Указанный способ осуществляется тем, что каждый решетчатый стабилизатор соединен кронштейном с двухпозиционным приводом раскрытия, складывания и фиксации, соединенным электрическими разъемами с системой управления ракетой, шарнирно закрепленным через кронштейн крепления с корпусом стартово-разгонной ступени, обеспечивающим раскрытие и складывание вокруг оси поворота решетчатого стабилизатора с его расфиксацией и фиксацией в крайних положениях. Каждый привод включает в себя силовой цилиндр и два демпфирующих цилиндра, объединенных в единый корпус, силовые шток и поршень, два демпфирующих штока и поршня, механизмы фиксации/расфиксации штока, два аккумулятора давления и механизмы выравнивания давления.
Недостатками способа и устройства прототипа являются:
- невозможность отделения механизмов устройства стабилизации от стартово-разгонной ступени после выхода из воды;
- необходимость задействования маршевых рулей после выхода из воды;
- конструкция устройства стабилизации полностью устанавливается за бортом на корпусе стартово-разгонной ступени ракеты, что создает дополнительные сопротивления как при движении в воде, так и при движении на больших скоростях в воздухе.
Технической задачей является создание условий для устойчивого движения ракеты при старте с движущегося носителя на подводном и воздушном участке траектории до момента отделения хвостового отсека и синхронного раскрытия стабилизаторов с последующей фиксацией в условиях сильного возмущающего потока.
Указанная техническая задача решается тем, что способ стабилизации движения ракеты при подводном старте сводится к обеспечению работы механизмов устройства стабилизации и последовательным командам системы управления. После выхода ракеты из ТПК и требуемой циклограммой временной задержки зафиксированные стабилизаторы, установленные в сложенном положении над обтюрирующим поясом ракеты таким образом, что внешний набегающий поток создает силы на внутренних и внешних поверхностях стабилизаторов, обусловленные влиянием динамического подпора при обтекании потоком пояса обтюрации на внутренние поверхности и действием возмущающего потока на внешние поверхности, расфиксируют и раскрывают совместно с механизмами раскрытия до появления внешнего раскрывающего момента на каждом стабилизаторе, демпфируют угловую скорость раскрытия и фиксируют стабилизаторы в конечном угловом положении конструктивными средствами. После выхода из воды отбрасывают пояс обтюрации, продолжая работу стабилизаторов до отделения хвостового отсека совместно с отработанной первой ступенью.
В устройстве стабилизации каждый стабилизатор раскрывается через ось поворота, параллельную продольной оси ракеты, и соединен через кронштейн с приводом, и в отличие от прототипа привод включает в себя цилиндр, разделенный на газовую и жидкостную полости поршнем с атмосферной полостью с закрепленной в жидкостной полости профилированной иглой, при этом внутри полости поршня размещена ось, шарнирно соединяющая поршень со штоком, совершающим поступательное совместно с поршнем и вращательное вокруг оси поршня движение. Шток при этом соединен с кронштейном, с закрепленным в пазу стабилизатором, с возможностью вращения вокруг оси поворота и фиксации двумя коническими подпружиненными пальцами, установленными в корпусе крышки привода, упирающимися в поверхность силового кронштейна и устанавливающимися в отверстия на кронштейне в конечном угловом положении стабилизатора. При этом жидкостная полость цилиндра имеет дроссельное отверстие, выполненное в сливной магистрали, перекрываемое после заданного угла раскрытия стабилизатора профилированной иглой, сливная магистраль соединена с заправочно-сливным клапаном и компенсатором, а газовая полость цилиндра соединена с аккумулятором давления. Крышка силового цилиндра выполнена единым корпусом с заправочно-сливным клапаном и компенсатором, а также имеет газовую магистраль с разъемом для работы аккумулятора давления и герметично установлена в отверстие на корпусе отсека ракеты, повторяя при этом внешний контур отсека, и воспринимает внешнюю нагрузку от стабилизатора.
Принципиальная схема способа и устройства стабилизации движения ракеты при подводном старте приведена на графических материалах фиг. 1÷4:
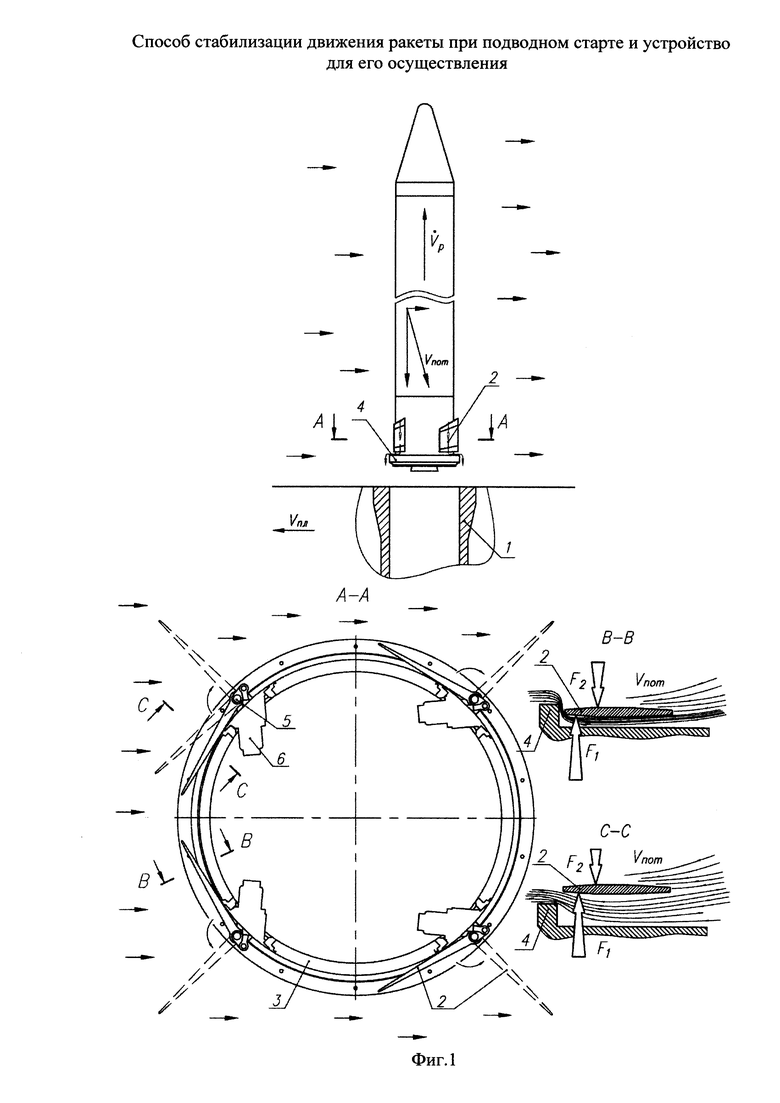
фиг. 1 - ракета после выхода из ТПК;
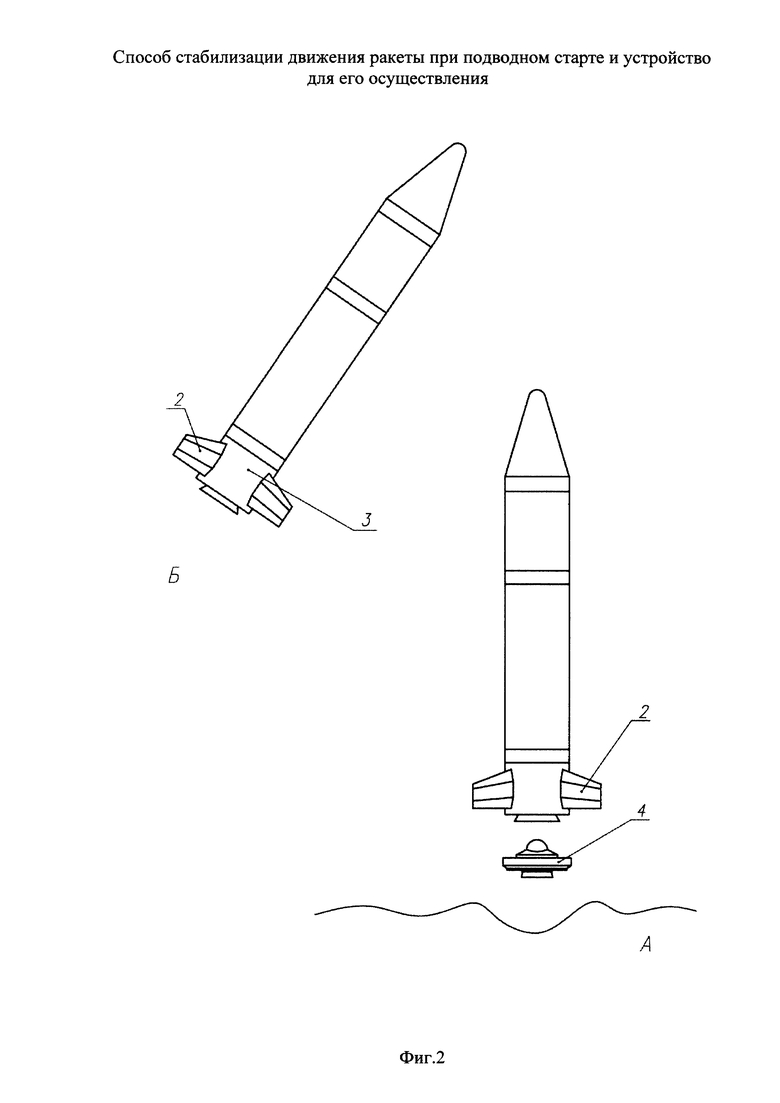
фиг. 2 - ракета после выхода из воды;
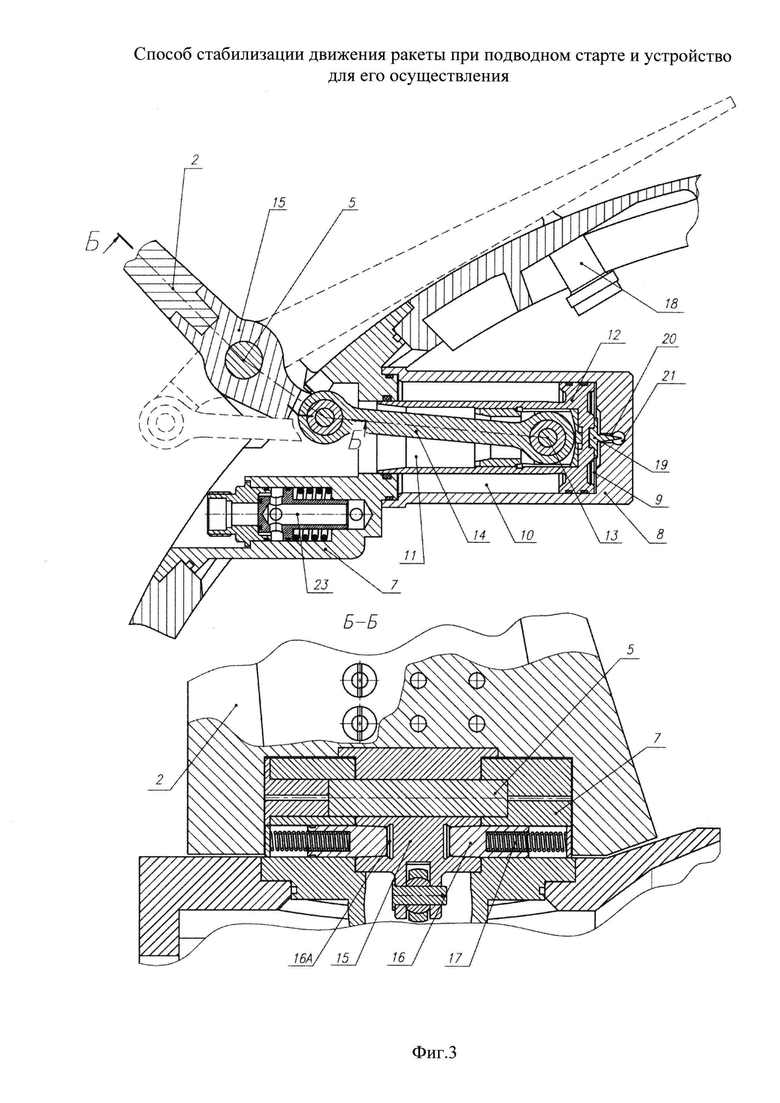
фиг. 3 - устройство стабилизации движения ракеты при подводном старте;
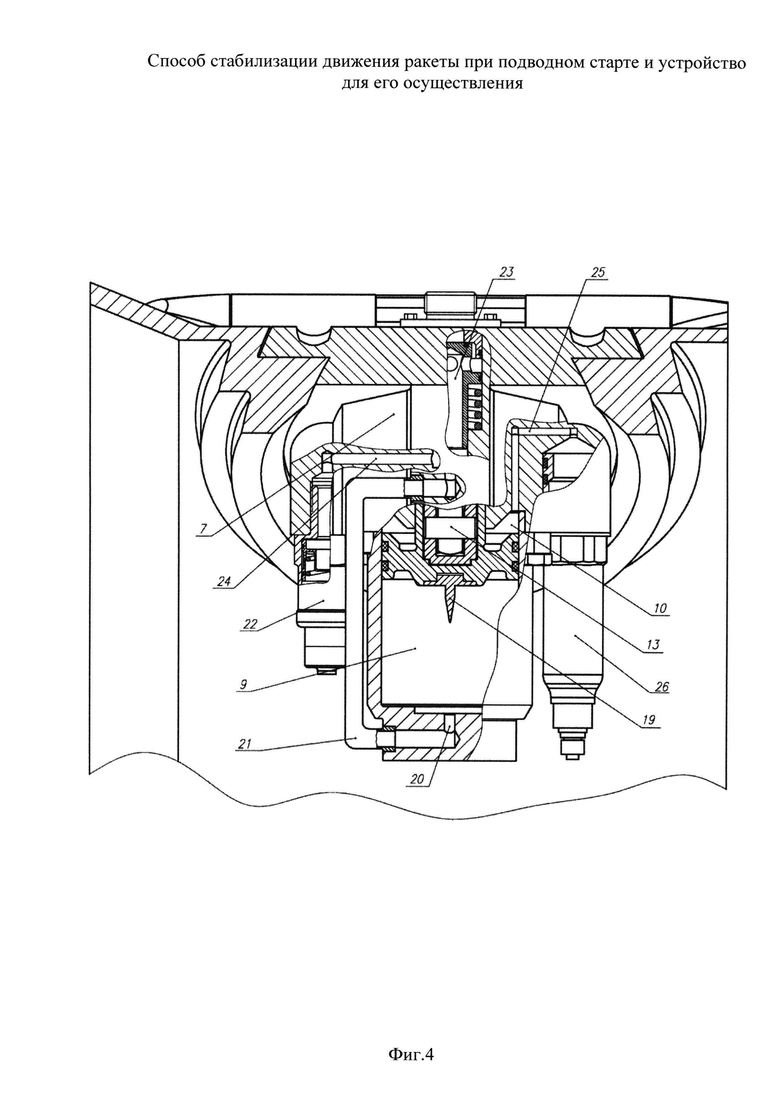
фиг. 4 - устройство стабилизации движения ракеты при подводном старте.
На представленных графических материалах приняты обозначения: транспортно-пусковой контейнер поз. 1 (фиг. 1), стабилизаторы поз. 2, расположенные на корпусе хвостового отсека поз. 3 над поясом обтюрации поз. 4, оси поворота стабилизаторов поз. 5 (фиг. 1, фиг. 3), приводы поз. 6, включающие крышку поз. 7 (фиг. 3), цилиндр поз. 8, разделенный на жидкостную поз. 9, газовую поз. 10 и атмосферную полости поз. 11 поршнем поз. 12, соединенным через внутреннюю ось поз. 13 со штоком поз. 14 и силовым кронштейном поз. 15, фиксирующимся двумя коническими пальцами поз. 16 при помощи пружин поз. 17 и фиксатором начального положения поз. 18, к поршню в жидкостной полости прикреплена профилированная игла поз. 19, перекрывающая дроссельное отверстие поз. 20, установленное в сливной магистрали поз. 21, соединяющейся с жидкостной полостью привода и компенсатором поз. 22 (фиг. 4) с заправочно-сливным клапаном поз. 23 через жидкостный канал поз. 24 в крышке цилиндра, соединенного с газовой полостью через газовый канал поз. 25 в крышке цилиндра с газогенератором поз. 26, при этом крышка цилиндра герметично устанавливается через уплотнение поз. 27 и повторяет контур корпуса отсека ракеты.
На фиг. 1 приняты условные обозначения:
Vпл - вектор скорости движения носителя;
Vотн - вектор скорости движения ракеты;
Vпот - суммарный вектор скорости движения потока воды относительно корпуса ракеты;
F1 - сила динамического подпора при обтекании пояса обтюрации на внутренней поверхности стабилизатора;
F2 - сила на внешней поверхности стабилизатора.
Ракета перед началом полета расположена в ТПК поз. 1 (фиг. 1) таким образом, что плоскости симметрии ракеты ориентированы с учетом направления движения носителя Vпл относительно сложенных и зафиксированных стабилизаторов поз. 2. После выхода ракеты из ТПК, получив команду от сигнализатора выхода из контейнера и выдержав необходимую задержку, подается команда на работу аккумуляторов давления поз. 26 (фиг. 4) и расфиксацию стабилизаторов поз. 2 фиксаторами поз. 18 (фиг. 3). Газ от аккумуляторов давления поступает по каналу поз. 25 (фиг. 4) в газовую полость поз. 10 (фиг. 3, фиг. 4) и двигает поршень поз. 12, имеющий атмосферную полость поз. 11 с расположенными внутренней осью с шарниром поз. 13, через которые поршень поз. 12 двигает шток поз. 14, закрепленный с кривошипом силового кронштейна поз. 15, при этом шток поз. 14 совершает поступательное движение вдоль оси поршня и вращательное вокруг внутренней оси поз. 13 в поршне поз. 12. Стабилизаторы поз. 2 (фиг. 1) раскрываются через ось раскрытия поз. 5 под действием сил F1 и F2 влияния потока воды Vпот, которые помогают раскрытию пар стабилизаторов поз. 2 и обусловлены влиянием потока Vпот, создающего динамический подпор при обтекании пояса обтюрации поз. 4 на внутренние поверхности стабилизаторов, и влиянием возмущающего потока Vпот на внешние поверхности. В конечном угловом положении осуществляется фиксация стабилизаторов поз. 2 (фиг. 3) при помощи двух конических пальцев поз. 16 (фиг. 3), расположенных внутри корпуса крышки цилиндра поз. 7 параллельно оси раскрытия поз. 5 и упирающихся одним краем во взведенную пружину поз. 17, а другим краем скользящих по силовому кронштейну поз. 15 и западающих в конечном угловом положении стабилизаторов поз. 2 в конические отверстия поз. 16А в силовом кронштейне поз. 15. Для достижения расчетных угловых скоростей раскрытия, обусловленных требованиями прочности элементов конструкции, а также требованиями по синхронности раскрытия стабилизаторов поз. 2 (фиг. 1) и работы приводов поз. 6, необходимо контролируемо демпфировать возмущающие внешние моменты и силы от работы газа, поступающего через газовый канал поз. 25 (фиг. 4) в крышке цилиндра поз. 7 от аккумулятора давления поз. 26 при помощи рабочей жидкости в жидкостной полости поз. 9. Рабочая жидкость из жидкостной полости поз. 9 выдавливается через дросселирующее отверстие поз. 20 в сливную магистраль поз. 21, соединенную через жидкостный канал поз. 24 в крышке цилиндра поз. 7 с заправочно-сливным клапаном поз. 23 (фиг. 3, фиг. 4), также установленным в корпусе крышки поз. 7, через который рабочая жидкость сливается за борт. При этом сливное дросселирующее отверстие поз. 20 цилиндра поз. 8 перекрывается при заданном угле раскрытия и ходе поршня поз. 12 профилированной иглой поз. 19, установленной в основание поршня поз. 12 вдоль его оси, создавая тем самым требуемые угловые скорости раскрытия стабилизаторов поз. 2 в моменты их фиксации в конечном угловом положении. После выхода из воды (фиг. 2А) подается команда на отброс пояса обтюрации поз. 4, при этом ракета выходит из воды под требуемым углом от вертикали, регулирующимся временем задержки подачи команды на расфиксацию стабилизаторов фиксаторами поз. 18 (фиг. 3), определенным по циклограмме системы управления. Стабилизаторы поз. 2 (фиг. 2Б) продолжают свою работу на воздушном участке траектории до отделения хвостового отсека поз. 3 совместно с отработанной первой ступенью.
Предлагаемое изобретение позволяет улучшить параметры устойчивости движения ракеты при подводном старте с движущихся носителей на подводном и воздушном участках траектории до момента отделения первой ступени и оптимизировать габаритно-массовые характеристики ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ РАКЕТЫ ПРИ ПОДВОДНОМ СТАРТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532287C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ НА ПОДВОДНОМ УЧАСТКЕ ТРАЕКТОРИИ | 2000 |
|
RU2193155C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| СПОСОБ ЗАПУСКА МНОГОСТУПЕНЧАТОЙ КОСМИЧЕСКОЙ РАКЕТЫ-НОСИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА-НОСИТЕЛЯ И МНОГОСТУПЕНЧАТАЯ РАКЕТА-НОСИТЕЛЬ | 2005 |
|
RU2265559C1 |
| СВЕРХЗВУКОВАЯ РАКЕТА | 2017 |
|
RU2686567C2 |
| ТРАНСПОРТНО-ПУСКОВОЙ МОДУЛЬ | 2003 |
|
RU2245503C1 |
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 2005 |
|
RU2292009C1 |
Изобретение относится к области ракетной техники, в частности к способам и устройствам стабилизации ракеты при подводном старте с движущегося носителя. Стабилизация движения ракеты при подводном старте сводится к обеспечению работы механизмов устройства стабилизации и последовательным командам системы управления. После выхода ракеты из транспортно-пускового контейнера и требуемой циклограммой временной задержки зафиксированные стабилизаторы, установленные в сложенном положении над обтюрирующим поясом ракеты таким образом, что внешний набегающий поток создает силы на внутренних и внешних поверхностях стабилизаторов, обусловленные влиянием динамического подпора при обтекании потоком пояса обтюрации на внутренние поверхности и действием возмущающего потока на внешние поверхности, расфиксируют и раскрывают совместно с механизмами раскрытия до появления внешнего раскрывающего момента на каждом стабилизаторе, демпфируют угловую скорость раскрытия и фиксируют стабилизаторы в конечном угловом положении конструктивными средствами. После выхода из воды отбрасывают пояс обтюрации, продолжая работу стабилизаторов до отделения хвостового отсека совместно с отработанной первой ступенью. Предлагаемое изобретение позволяет улучшить параметры устойчивости движения ракеты при подводном старте с движущихся носителей на подводном и воздушном участках траектории до момента отделения первой ступени и оптимизировать габаритно-массовые характеристики ракеты. 2 н. и 2 з.п. ф-лы, 9 ил.
1. Способ стабилизации движения ракеты при подводном старте, включающий запуск энергетического средства старта и контроль параметров движения ракеты, имеющей на корпусе хвостового отсека пояс обтюрации и зафиксированные сложенные стабилизаторы, раскрывающиеся и фиксирующиеся в воде после выхода из транспортно-пускового контейнера, отличающийся тем, что зафиксированные стабилизаторы, установленные в сложенном положении над обтюрирующим поясом ракеты таким образом, что внешний набегающий поток создает силы на внутренних и внешних поверхностях стабилизаторов, обусловленные влиянием динамического подпора при обтекании потоком пояса обтюрации на внутренние поверхности и действием возмущающего потока на внешние поверхности стабилизаторов, после требуемой циклограммой системы управления временной задержки расфиксируют и раскрывают совместно с механизмами раскрытия до появления внешнего раскрывающего момента на каждом стабилизаторе, демпфируют угловую скорость раскрытия и фиксируют стабилизаторы в конечном угловом положении конструктивными средствами, и после выхода из воды отбрасывают пояс обтюрации, продолжая работу стабилизаторов до отделения хвостового отсека совместно с отработанной первой ступенью.
2. Устройство для стабилизации движения ракеты при подводном старте, содержащее раскрывающийся через ось поворота, параллельную продольной оси ракеты, стабилизатор, соединенный через кронштейн с приводом и фиксирующийся в раскрытом положении механизмом фиксации, отличающееся тем, что привод включает в себя цилиндр, разделенный на газовую и жидкостную полости поршнем с атмосферной полостью с закрепленной в жидкостной полости профилированной иглой, при этом внутри полости поршня размещена ось, шарнирно соединяющая поршень со штоком, совершающим поступательное совместно с поршнем и вращательное вокруг оси поршня движение, а шток соединен с кронштейном, с закрепленным стабилизатором, с возможностью вращения вокруг оси поворота и фиксации двумя коническими подпружиненными пальцами, установленными в корпусе крышки привода, упирающимися в поверхность силового кронштейна и устанавливающимися в отверстия на кронштейне в конечном угловом положении стабилизатора, при этом жидкостная полость цилиндра имеет дроссельное отверстие, выполненное в сливной магистрали, перекрываемое после заданного угла раскрытия стабилизатора профилированной иглой, сливная магистраль соединена с заправочно-сливным клапаном и компенсатором, а газовая полость цилиндра соединена с аккумулятором давления.
3. Устройство по п. 2, отличающееся тем, что крышка силового цилиндра выполнена единым корпусом с заправочно-сливным клапаном и компенсатором, а также имеет газовую магистраль с разъемом для работы аккумулятора давления.
4. Устройство по п. 2, отличающееся тем, что крышка силового цилиндра герметично установлена в отверстие на корпусе отсека ракеты и повторяет при этом внешний контур отсека.
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ РАКЕТЫ ПРИ ПОДВОДНОМ СТАРТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532287C1 |
| РЕАКТИВНЫЙ СНАРЯД С РАСКРЫВАЮЩИМСЯ ОПЕРЕНИЕМ | 1996 |
|
RU2096646C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ НА ПОДВОДНОМ УЧАСТКЕ ТРАЕКТОРИИ | 2000 |
|
RU2193155C2 |
| СТАБИЛИЗАТОР УПРАВЛЯЕМОЙ РАКЕТЫ | 2009 |
|
RU2396508C1 |
| 0 |
|
SU155579A1 | |
| Селектор импульсов по периоду следования | 1981 |
|
SU976483A1 |
| US 3697019 A1, 10.10.1972. | |||

