Изобретение относится к области ракетной техники и, в частности, к способам и устройствам стабилизации движения ракеты, стартующей из-под воды с движущейся подводной лодки.
Известны способ и устройство для стабилизации движения морской баллистической ракеты на подводном участке траектории (патент №2193155 ГРЦ «КБ им. Акад. В.П. Макеева»), содержащей хвостовой отсек с отделяемым поясом обтюрации и шарнирно закрепленными на нем поворотными пластинами, раскрываемыми пружинами и фиксирующимися в конечном положении после выхода из транспортно-пускового контейнера (ТПК).
Способ стабилизации движения ракеты заключается в том, что после выхода ракеты из ТПК поворотные пластины пояса обтюрации, расположенного на хвостовом отсеке ракеты, разворачивают навстречу набегающему потоку воды и, при достижении пластинами заданного углового положения относительно корпуса ракеты, фиксируют конструктивными средствами. После выхода ракеты из воды по команде системы управления производят отделение пояса обтюрации от ракеты с целью уменьшения аэродинамического сопротивления на активном участке траектории.
Устройство для осуществления способа содержит установленный на хвостовом отсеке ракеты пояс обтюрации из отдельных секций, состоящих из закрепленного на ракете основания и соединенной с ним шарнирно резинометаллической пластины, упирающейся свободным подпружиненным концом в стенку пусковой шахты. Каждая пластина соединена с основанием посредством оси и двух проушин, образованных на пластине. В проушинах выполнены отверстия для взаимодействия с фиксаторами, расположенными в корпусе основания.
Наиболее близким по технической сущности к предлагаемому изобретению является прототип (патент №WO 2008150311 (A2) США «Отделяемая система аэродинамической стабилизации ракеты»), содержащий хвостовой отсек с установленными на корпусе решетчатыми стабилизаторами, упирающимися в корпус ТПК, раскрывающимися после выхода из ТПК пружинными механизмами и удерживаемыми в раскрытом положении набегающим потоком воды. После выхода из воды хвостовой отсек отделяют по команде системы управления.
Недостатками способа и устройства прототипа являются:
- отсутствие механизмов фиксации начального и конечного положения стабилизаторов;
- отсутствие возможности складывания стабилизаторов после выхода из воды и перед началом разгонного участка;
- использован пружинный механизм раскрытия решетчатых стабилизаторов, ограничивающий их максимально допустимые размеры;
- отсутствие механизмов демпфирования гидродинамических моментов для снижения угловых скоростей поворота стабилизаторов в воде;
- использованный принцип отделения хвостового отсека с решетчатыми стабилизаторами от разгонной ступени увеличивает габарит ракеты, ее массу и ведет к снижению тактико-технических характеристик;
- большие возмущения на ракету при отделении хвостового отсека с раскрытыми стабилизаторами при малых скоростях полета могут приводить к потере управления.
Кроме того, раскрытие решетчатых стабилизаторов производится в возмущенной среде, которая может как препятствовать, так и помогать раскрытию, в результате чего угловые скорости раскрытия на каждом из стабилизаторов приведенного прототипа могут иметь разные значения (несинхронность раскрытия) и приводить к непрогнозируемым возмущающим моментам. Поэтому к устройству для раскрытия решетчатых стабилизаторов должны предъявляться жесткие требования по синхронности установки стабилизаторов в рабочее положение во всем диапазоне применения с обеспечением минимального времени раскрытия стабилизаторов.
Целью изобретения является создание условий для устойчивого движения ракеты при старте с движущегося носителя в воде и в воздухе до начала работы стартово-разгонной ступени, а также обеспечение синхронного раскрытия в воде и фиксации решетчатых стабилизаторов в крайних положениях.
Указанная цель достигается тем, что способ стабилизации движения ракеты при подводном старте сводится к обеспечению определенной последовательности работы механизмов устройства стабилизации, включающей начальную фиксацию в сложенном положении на корпусе стартово-разгонной ступени решетчатых стабилизаторов, их расфиксацию, синхронное раскрытие, демпфирование и фиксацию в раскрытом положении после выхода из транспортно-пускового контейнера, расфиксацию, складывание и фиксацию решетчатых стабилизаторов в сложенном положении и одновременное раскрытие маршевых рулей после выхода из воды, а после набора необходимой скорости - отделение стартово-разгонной ступени со сложенными стабилизаторами от корпуса ракеты.
В устройстве стабилизации в отличие от прототипа каждый решетчатый стабилизатор соединен кронштейном с двухпозиционным приводом раскрытия, складывания и фиксации, соединенным электрическими разъемами с системой управления ракетой, шарнирно закрепленным через кронштейн крепления с корпусом стартово-разгонной ступени, обеспечивающим раскрытие и складывание вокруг оси поворота решетчатого стабилизатора. Каждый привод включает в себя:
- силовой цилиндр и два демпфирующих цилиндра, объединенных в единый корпус;
- силовые шток и поршень, разделяющие полость силового цилиндра на газовые полости раскрытия и складывания;
- два демпфирующих штока и поршня, разделяющие полости демпфирования, заполненные демпфирующей жидкостью и сообщающиеся между собой отверстием;
- механизмы фиксации/расфиксации штока, встроенные в газовых полостях раскрытия и складывания, содержащие шарики, упирающиеся одним краем в канавку силового цилиндра, другим - в подпружиненные плунжеры раскрытия и складывания;
- два аккумулятора давления, соединенные газовыми каналами корпуса привода с полостями раскрытия и складывания соответственно;
- механизм выравнивания давления в полости раскрытия, содержащий выступ на поршне и отверстие в плунжере, разделяющие в конце хода поршня полость раскрытия на две независимые полости;
- механизм выравнивания давления в полости складывания, содержащий канавку, сообщающую в конце хода полость складывания с атмосферой.
Принципиальная схема способа и устройства стабилизации движения ракеты при подводном старте приведена на чертежах:
фиг.1 - ракета в ТПК;
фиг.2 - ракета после выхода из ТПК;
фиг.3 - ракета после выхода из воды;
фиг.4 - отделение стартово-разгонной ступени;
фиг.5 - двухпозиционный привод раскрытия, складывания и фиксации.
На представленных чертежах приняты обозначения: транспортно-пусковой контейнер поз.1 (фиг.1), решетчатые стабилизаторы поз.2, симметрично расположенные вокруг корпуса стартово-разгонной ступени поз.3, оси поворота стабилизаторов поз.4 (фиг.1, фиг.5а), маршевые рули поз.5, механизмы фиксации рулей поз.6, двухпозиционные привода поз.7, кронштейны крепления поз.8 приводов к корпусу стартово-разгонной ступени; каждый привод включает в себя силовой поршень поз.9 (фиг.5) и силовой шток поз.10, механизм фиксации штока в сложенном положении поз.11 и механизм фиксации штока в раскрытом положении поз.11А, два аккумулятора давления поз.12, 12А, два демпфирующих устройства поз.13, соединенных демпфирующими поршнями - штоками поз.14 и единой осью поз.15 с силовым штоком поз.16 и силовым кронштейном стабилизатора поз.17 (фиг.1, фиг.5а); механизмы фиксации содержат подпружиненные плунжеры поз.18 и 18А, стопорные шарики поз.19 и 19А, канавки поз.20 и 20А и выравнивающие давления в полостях раскрытия поз.21 и 21А зазор поз.22 и отверстие поз.22А; демпфирующие устройства содержат рабочую жидкость поз.23, перетекающую через профилированные отверстия поз.24 в демпфирующие полости раскрытия поз.25 и складывания поз.25А.
Ракета перед началом полета находится в ТПК поз.1 (фиг.1), ее маршевые рули поз.5 находятся в сложенном положении и зафиксированы механизмами поз.6, решетчатые стабилизаторы поз.2 находятся в сложенном положении и зафиксированы механизмом поз.11 (фиг.5). После выхода из ТПК поз.1 (фиг.2), получив команду от сигнализатора выхода из контейнера, задействуются аккумуляторы давления поз.12 и газ подается в рабочую полость раскрытия поз.21 (фиг.5), приводов поз.7, силовой поршень поз.9 освобождается механизмом фиксации поз.11, стабилизаторы поз.2 раскрываются и фиксируются в раскрытом положении механизмом фиксации поз.11А. После выхода из воды (фиг.3), получив команду от сигнализатора выхода из воды, механизм фиксации рулей поз.6 освобождает маршевые рули, которые под действием пружины раскрываются и фиксируются в раскрытом положении, одновременно по команде раскрытия рулей поз.6 задействуются аккумуляторы давления поз.12А, газ от которых подается в рабочую полость складывания поз.21А (фиг.5), силовой поршень поз.9 освобождается механизмом фиксации поз.11А, стабилизаторы поз.2 (фиг.3) складываются и фиксируются в сложенном положении механизмом фиксации поз.11 (фиг.5).
Работа механизма фиксации поз.11 (фиг.5б) в сложенном положении стабилизатора осуществляется при помощи подпружиненного плунжера поз.18 и стопорных шариков поз.19, упирающихся в канавку корпуса привода поз.7 и сопряженных с поршнем поз.9, жестко фиксирующих перемещение поршня. Под действием давления, поступающего от аккумулятора давления поз.12, плунжер поз.18 перемещается и стопорные шарики поз.19 выдавливаются из канавки поз.20 корпуса поз.7, поршень поз.9 освобождается, стабилизаторы поз.2 раскрываются. При достижении угла раскрытия стабилизаторов поз.2 (фиг.5а) 90° на штоке поз.10 канавка проходит уплотнительное кольцо, в результате газ от аккумулятора давления поз.12 стравливается через зазор поз.22, одновременно с этим в работу вступает механизм фиксации поз.11А стабилизатора поз.2 в раскрытом положении. Работа механизма фиксации поз.11А осуществляется при помощи подпружиненного плунжера поз.18А. При раскрытии стабилизаторов поз.2 на угол 90° плунжер поз.18А поддевает стопорные шарики поз.19А в канавку поз.20А корпуса привода поз.7, и шарики поз.19А, сопряженные с поршнем поз.9, надежно фиксируют перемещение поршня поз.9. Для нормальной работы подпружиненного плунжера поз.18А при складывании стабилизаторов поз.2 в полости поз.21 А осуществляется выравнивание давления через отверстие поз.22А, которое при достижении угла раскрытия 90° перекрывается поршнем поз.9, что дает возможность функционирования подпружиненного плунжера поз.18А при расфиксации поршня поз.9 в момент работы аккумуляторов давления поз.12А.
Необходимые угловые скорости раскрытия/складывания стабилизаторов обеспечиваются работой двух демпфирующих устройств поз.13 (фиг.5а), состоящих из демпфирующего поршня-штока поз.14, имеющего профилированное отверстие поз.24, через которое осуществляется переток рабочей жидкости поз.23 в демпфирующие полости раскрытия поз.25 и складывания поз.25А при работе газа от газогенераторов поз.12, 12А в полостях поз.21 и 21А соответственно.
После достижения заданной скорости движения ракеты подается команда на отделение стартово-разгонной ступени поз.3 (фиг.4) со сложенными стабилизаторами поз.2. Благодаря высокой скорости движения ракеты в момент отделения стартово-разгонной ступени корпус ракеты не испытывает относительно большого возмущения в процессе отделения.
Предлагаемое техническое решение по сравнению с известными позволяет улучшить параметры устойчивости движения ракеты при подводном старте с движущегося носителя до начала работы стартово-разгонной ступени, оптимизировать габаритно-массовые характеристики, как следствие, повысить показатель «эффективность-стоимость» для проектируемой техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ РАКЕТЫ ПРИ ПОДВОДНОМ СТАРТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2607126C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 2005 |
|
RU2292009C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 2005 |
|
RU2272240C1 |
| СВЕРХЗВУКОВАЯ РАКЕТА | 2017 |
|
RU2686567C2 |
| Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера | 2019 |
|
RU2714616C1 |
| РАКЕТА С ПОДВОДНЫМ СТАРТОМ | 2007 |
|
RU2352894C1 |
| РАКЕТНЫЙ БЛОК МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2053168C1 |
| СПОСОБ ЗАПУСКА МНОГОСТУПЕНЧАТОЙ КОСМИЧЕСКОЙ РАКЕТЫ-НОСИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА-НОСИТЕЛЯ И МНОГОСТУПЕНЧАТАЯ РАКЕТА-НОСИТЕЛЬ | 2005 |
|
RU2265559C1 |
Изобретение относится ракетной технике, а именно к устройствам стабилизации движения ракеты. Устройство стабилизации движения ракеты при подводном старте содержит шарнирно закрепленные с корпусом стартово-разгонной ступени решетчатые стабилизаторы, кронштейн, двухпозиционный привод раскрытия, складывания и фиксации (ДППРСФ), электрические разъемы для соединения с системой управления ракетой. ДППРСФ содержит в едином корпусе силовой и два демпфирующих цилиндра, силовые шток и поршень, два демпфирующих штока и поршня. В газовых полостях силового цилиндра встроены механизмы фиксации, расфиксации силового штока с шариками и механизмы выравнивания давления с канавками. Решетчатые стабилизаторы фиксируют в сложенном положении на корпусе стартово-разгонной ступени ракеты, после выхода из транспортно-пускового контейнера по сигналам системы управления стабилизаторы расфиксируют, раскрывают и фиксируют в раскрытом положении, после выхода из воды решетчатые стабилизаторы складывают и фиксируют в сложенном положении одновременно с раскрытием и фиксацией маршевых рулей конструктивными средствами, после достижения заданной скорости отделяют стартово-разгонную ступень со сложенными решетчатыми стабилизаторами от ракеты. Изобретение позволяет повысить устойчивость движения ракеты при старте с движущегося носителя. 2 н.п. ф-лы, 5 ил. 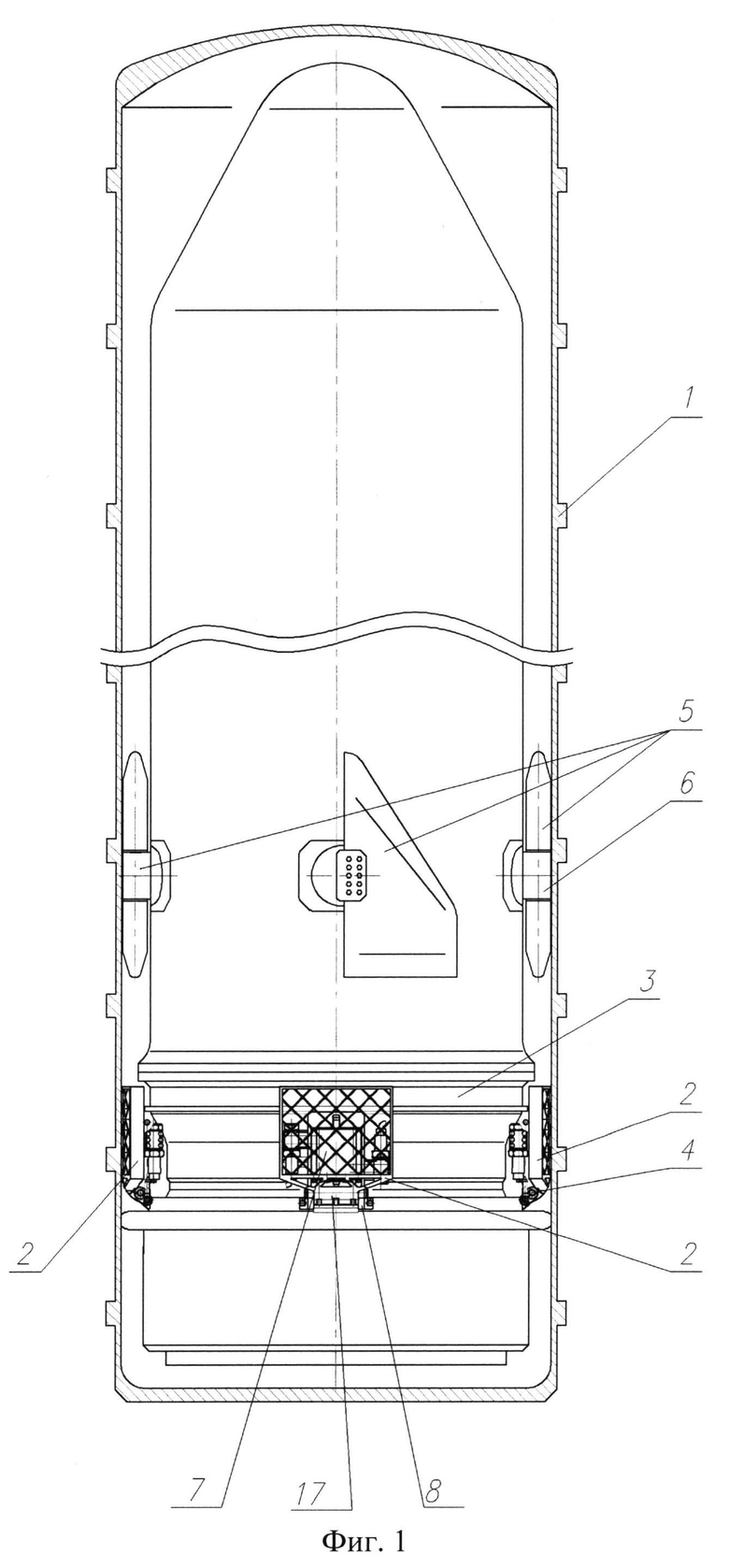
1. Способ стабилизации движения ракеты при подводном старте, включающий запуск энергетического средства старта и контроль параметров движения ракеты, раскрытие в воде после выхода из транспортно-пускового контейнера сложенных решетчатых стабилизаторов, раскрытие и фиксацию маршевых рулей после выхода из воды, отличающийся тем, что решетчатые стабилизаторы фиксируют в сложенном положении на корпусе стартово-разгонной ступени ракеты, после выхода из транспортно-пускового контейнера по сигналам системы управления стабилизаторы расфиксируют, раскрывают и фиксируют в раскрытом положении, после выхода из воды решетчатые стабилизаторы складывают и фиксируют в сложенном положении одновременно с раскрытием и фиксацией маршевых рулей конструктивными средствами, после достижения заданной скорости отделяют стартово-разгонную ступень со сложенными решетчатыми стабилизаторами от ракеты.
2. Устройство стабилизации движения ракеты при подводном старте, содержащее раскрывающиеся через ось поворота решетчатые стабилизаторы, отличающееся тем, что каждый решетчатый стабилизатор соединен кронштейном с двухпозиционным приводом раскрытия, складывания и фиксации, соединенным электрическими разъемами с системой управления ракетой, шарнирно закрепленным через кронштейн крепления с корпусом стартово-разгонной ступени, содержащим в едином корпусе силовой и два демпфирующих цилиндра, силовые шток и поршень, разделяющие полость силового цилиндра на газовые полости раскрытия и складывания, а также два демпфирующих штока и поршня, разделяющие полости цилиндров демпфирования на сообщающиеся через отверстия и заполненные демпфирующей жидкостью полости, при этом в газовых полостях силового цилиндра встроены механизмы фиксации/расфиксации силового штока и механизмы выравнивания давления, механизмы фиксации содержат шарики, упирающиеся одним краем в канавку силового цилиндра, другим - в подпружиненные плунжеры раскрытия и складывания, механизм выравнивания давления в полости раскрытия содержит выступ на поршне и отверстие в плунжере, разделяющие в конце хода поршня полость раскрытия на две независимые полости, механизм выравнивания давления в полости складывания содержит канавку, сообщающую в конце хода полость складывания с атмосферой, при этом каждая полость раскрытия и складывания соединена каналами в корпусе привода с аккумуляторами давления.
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ НА ПОДВОДНОМ УЧАСТКЕ ТРАЕКТОРИИ | 2000 |
|
RU2193155C2 |
| WO 2008150311 A2, 11.12.2008 | |||
| US 5048773 A1, 17.09.1991 | |||
| JP 2000028295 A, 28.01.2000 | |||

