Настоящее изобретение относится к уплотняющим транспортным средствам, а более конкретно - к системам для поливки или смачивания вальцов уплотняющего транспортного средства.
Уплотняющие транспортные средства или катки известны и содержат в основном раму и один или два вальца, соединенные с рамой, при этом одновальцовые транспортные средства включают в себя пару колес вместо второго вальца. Двухвальцовые катки, как правило, используются для уплотнения слоев дорожного покрытия (например, асфальта), образованного машиной-укладчиком, при сооружении автострад, взлетно-посадочных полос аэропортов, автостоянок и т.п. В типичном случае, уплотняющее транспортное средство непрерывно катается назад и вперед по участкам слоя материала, так что вес катка вместе с ударными воздействиями вибраторных механизмов внутри вальцов передается через эти вальцы, уплотняя слой до достижения желаемой плотности.
Во время таких операций уплотнения желательно непрерывно подавать или наносить на внешние поверхности вальцов «смачивающую» текучую среду, в типичном случае - воду или раствор на водной основе. В противном случае материал дорожного покрытия проявляет склонность к прилипанию к внешней поверхности вальца (вальцов), что приводит к созданию разрывов или дыр в покрытии, когда из этого покрытия вынимается прилипший материал, вмятин в слое, где прилипший материал впоследствии прижимается к верхней поверхности слоя, и/или наростов на слое, где материал впоследствии принудительно внедряется обратно в покрытие с поверхности вальца. Вообще говоря, чем горячее материал или чем «жестче» условия окружающей среды, тем больший объем воды или текучей среды требуется для адекватного покрытия внешней поверхности вальцов, для предотвращения формирования сухих пятен вследствие испарения. Кроме того, чем больше скорость качения катка, тем больший объем воды необходим для того, чтобы гарантировать, что поверхность вальцов остается покрытой, во избежание прилипания материала.
В общем случае, уплотняющие транспортные средства снабжены поливающей или «смачивающей» системой, которая, как правило, включает в себя источник текучей среды, например бак текучей среды или воды, линии или шланги текучей среды, соединенные с баком, и насос для перекачивания текучей среды из бака по шлангам. Кроме того, около вальца в типичном случае расположено одно или более сопловых устройств, таких как многоканальные распылительные линейки, для распределения текучей среды по внешней поверхности вальца. Поскольку подача воды осуществляется на борту транспортного средства, важным ограничением, накладываемым на уплотняющее транспортное средство, является водоизмещение смачивающей системы, выражаемое как общим объемом текучей среды, имеющейся в баках, так и временем полного опорожнения баков. Поскольку воду или другую текучую среду нужно пополнять, когда запас текучей среды расходуется, операцию уплотнения вследствие этого приходится останавливать на то время, которое потребуется для пополнения запаса воды или текучей среды.
Для экономного расходования воды в прошлом применяли разные способы. Один известный способ экономного расходования воды заключается в создании системы управления для автоматического запуска и останова смачивающей системы, когда уплотняющее транспортное средство соответственно начинает двигаться из состояния покоя или останавливается во время операции уплотнения. Кроме того, разработаны средства ручного управления, такие как ручной реостат, позволяющие оператору транспортного средства регулировать расход из насосов применительно к изменяющимся условиям слоя материала и рабочим скоростям. Вместе с тем, когда операторы малоопытны, они часто стараются установить расход насосов на максимальное значение, тем самым препятствуя экономному расходованию смачивающей текучей среды и обесценивая наличие таких средств управления. Помимо этого избыточная смачивающая текучая среда, наносимая на вальцы, старается стечь на слой материала и вызвать преждевременное охлаждение некоторых участков материала. Последующее уплотнение посредством вальцов, особенно когда их используют в сочетании с вибрационными механизмами вальцов, сообщающими высокий уровень вибрации, может вызвать образование поверхностных или плоских трещин в слое материала, которые могут уменьшить предполагаемый срок службы покрытия.
Следовательно, ввиду вышеуказанных ограничений, связанных с известными смачивающими системами, было бы желательно разработать систему управления для поливочной или смачивающей системы катка, которая лучше экономит воду или другую смачивающую текучую среду и которая предотвращает наступление избыточного смачивания, могущее привести к стеканию текучей среды.
В одном своем аспекте, настоящее изобретение представляет собой систему для подачи текучей среды на валец уплотняющего транспортного средства. Эта подающая текучую среду система или «смачивающая» система включает источник текучей среды и линию подачи текучей среды, имеющую впускное отверстие, сообщающееся посредством текучей среды с источником текучей среды, и выпускное отверстие, расположенное с обеспечением возможности направления текучей среды на валец. Система управления содержит главным образом регулятор, выполненный с обеспечением возможности регулирования расхода текучей среды через выпускное отверстие. С транспортным средством соединен датчик скорости, выполненный с обеспечением возможности измерения скорости движения транспортного средства. Кроме того, с датчиком скорости и с регулятором оперативно соединена логическая схема. Эта логическая схема выполнена с обеспечением возможности автоматического приведения в действие регулятора, когда скорость транспортного средства изменяется, таким образом, что регулятор регулирует расход через выпускное отверстие в основном пропорционально измеренной скорости транспортного средства.
В еще одном своем аспекте, настоящее изобретение также представляет собой систему управления для вышеописанной смачивающей системы. Эта система управления содержит главным образом регулятор, выполненный с обеспечением возможности регулирования потока текучей среды через выпускное отверстие, и датчик, выполненный с обеспечением возможности измерения вращения вальца. С датчиком и с регулятором оперативно соединена логическая схема. Эта логическая схема выполнена с обеспечением возможности автоматического приведения в действие регулятора таким образом, что поток текучей среды через выпускное отверстие допускается на протяжении либо предварительно заданного расстояния или перемещения при движении вальца, либо предварительно заданного периода времени. Кроме того, поток текучей среды через выпускное отверстие попеременно прерывается на протяжении либо предварительно заданного периода времени, либо предварительно заданного расстояния при движении вальца.
В дополнительном аспекте, настоящее изобретение также представляет собой систему управления для вышеописанной смачивающей системы. Эта система управления содержит главным образом регулятор, выполненный с обеспечением возможности регулирования течения текучей среды через выпускное отверстие, и датчик, выполненный с обеспечением возможности измерения вращения вальца. С датчиком и с регулятором оперативно соединена логическая схема, выполненная с обеспечением возможности избирательного приведения в действие регулятора попеременно в первом рабочем режиме и во втором рабочем режиме. В первом рабочем режиме регулятор поддерживает расход через выпускное отверстие линии подачи, в основном, пропорциональный скорости транспортного средства. Во втором рабочем режиме поток текучей среды через выпускное отверстие допускается на протяжении предварительно заданного расстояния или перемещения при движении вальца и попеременно прерывается на протяжении предварительно заданного периода времени.
Вышеуказанное краткое изложение сущности изобретения, а также подробное описание предпочтительных вариантов осуществления настоящего изобретения станут лучше понятными, если изучать их в связи с прилагаемыми чертежами. Для иллюстрации изобретения, на чертежах показаны схематические варианты осуществления, предпочтительные в настоящее время. Однако следует понять, что изобретение не сводится к проиллюстрированным конкретным компоновкам и инструментальным средствам. На чертежах изображено:
фиг.1 - вид в перспективе сзади уплотняющего транспортного средства, имеющего смачивающую текучей средой систему и систему управления для этой смачивающей системы в соответствии настоящим изобретением;
фиг.2 - схематический вид системы управления согласно настоящему изобретению, показанный с первой предпочтительной конструкцией регулятора;
фиг.3 - схематический вид системы управления согласно настоящему изобретению, показанный со второй предпочтительной конструкцией регулятора;
фиг.4 - частичное изображение с пространственным разделением деталей рамы уплотняющего транспортного средства и различных компонентов смачивающей системы;
фиг.5 - выполненное в увеличенном масштабе изображение с пространственным разделением деталей рамы транспортного средства и различных компонентов смачивающей системы;
фиг.6 - показанный с частичным вырывом вид сверху основного насоса и вспомогательного насоса, используемых в смачивающей системе;
фиг.7 - выполненное в увеличенном масштабе сечение основного насоса;
фиг.8 - блок-схема последовательности операций, иллюстрирующая первый, обеспечивающий непрерывное течение рабочий режим системы управления, причем здесь отображены средства управления, предусматривающие наличие регулятора с разомкнутым контуром;
фиг.9 - блок-схема последовательности операций, иллюстрирующая первый, обеспечивающий непрерывное течение рабочий режим системы управления, причем здесь отображены средства управления, предусматривающие наличие регулятора с замкнутым контуром;
фиг.10 - блок-схема последовательности операций, иллюстрирующая второй, обеспечивающий прерывистое течение рабочий режим системы управления; и
фиг.11 - график, изображающий различные альтернативные зависимости между расходом, обеспечиваемым смачивающей системой, и скоростью транспортного средства, устанавливаемой системой управления.
На фиг.1-11 чертежей, на которых одинаковые позиции везде используются для обозначения одинаковых элементов, показан предпочтительный в настоящее время вариант осуществления системы 10 управления, предназначенной для системы 12 для нанесения текучей среды, по меньшей мере, на один валец 2 уплотняющего транспортного средства 1. Наносящая текучую среду или «смачивающая» системы 12 включает в себя источник 14 текучей среды и, по меньшей мере, одну линию 16 подачи текучей среды, имеющую впускное отверстие 18, сообщающееся посредством текучей среды с источником 14 текучей среды, и выпускное отверстие 20, расположенное с обеспечением возможности направления текучей среды на валец 2. Система 10 содержит главным образом регулятор 22, датчик 24 скорости и логическую схему 26, оперативно соединенную с регулятором 22 и датчиком 24 скорости. Регулятор 22 выполнен с обеспечением возможности регулирования расхода «RA» текучей среды через выпускное отверстие 20 линии подачи, а значит - и регулирование количества или объема «FA» текучей среды, подаваемой на валец 2. Датчик 24 скорости соединен с транспортным средством 1 и выполнен с обеспечением возможности измерения скорости "S" движения транспортного средства. В предпочтительном варианте, датчик 24 скорости также выполнен с обеспечением возможности измерения вращательного перемещения dR вальца 2 вокруг центральной оси 3 вальца (т.е. оси вращения). В альтернативном варианте, система 10 управления может включать в себя отдельный датчик 25 перемещения (связи которого показаны штрих-пунктирными линиями на фиг.2), выполненный с обеспечением возможности измерения вращательного перемещения dR вальца 2 вокруг центральной оси 3, что рассматривается ниже.
Кроме того, с датчиком 24 скорости и с регулятором 22 оперативно соединена логическая схема 26, выполненная с обеспечением возможности автоматического приведения в действие регулятора 22 для поддержания расхода RA через выпускное отверстие 20 линии подачи, в основном, пропорциональным скорости S транспортного средства. Иными словами, когда скорость S транспортного средства 1 изменяется, регулятор 22 регулирует расход RA через выпускное отверстие 20 таким образом, что расход RA остается в основном пропорциональным измеренной скорости S транспортного средства. Более конкретно, логическая схема 26 выполнена (т.е. выполнена или запрограммирована) с обеспечением возможности приведения в действие регулятора 22 таким образом, что регулятор 22 увеличивает расход RA текучей среды через выпускное отверстие 20, когда измеренная скорость S транспортного средства увеличивается, а в альтернативном варианте - уменьшает расход RA текучей среды через выпускное отверстие 20, когда измеренная скорость S транспортного средства уменьшается. Вышеописанный способ, которым логическая схема 26 приводит в действие регулятор 22, именуется ниже «режимом непрерывного потока» и предпочтительно является одним из совокупности рабочих режимов, изображенных на фиг.8 и поясняемых ниже.
На фиг.2, 3 и 9 изображена логическая схема 26, предпочтительно конфигурированная также с обеспечением возможности приведения в действие регулятора 22 в двухэтапном или двухцикловом «режиме прерывистого потока», который обычно протекает следующим образом. В режиме прерывистого потока регулятор 22 допускает или активизирует поток текучей среды через выпускное отверстие 20, предпочтительно - на протяжении предварительно заданного вращательного перемещения dR вальца 2 («цикл смачивания») и попеременно прерывает поток через выпускное отверстие 20, предпочтительно - на предварительно определенный период времени («цикл прерывания»). В предпочтительном варианте, описанный цикл смачивания занимает один полный оборот вальца 2, но цикл смачивания может иметь длительность, соответствующую только части оборота вальца или нескольким оборотам вальца, или даже предварительно заданному периоду времени.
Кроме того, логическая схема 26 предпочтительно выполнена с обеспечением возможности приведения в действие регулятора 22 в первом режиме - непрерывного потока (фиг.8 и 9), и попеременно приведения в действие регулятора 22 во втором режиме - прерывистого потока (фиг.10). Как таковая, система 10 управления предпочтительно включает в себя устройство 27 выбора оператором, оперативно соединенное с логической схемой 26. Устройство 27 выбора выполнено с обеспечением предоставления оператору транспортного средства возможности избирательно подавать в логическую схему 26 команду приводить в действие регулятор 22 в первом режиме - непрерывного потока и - попеременно - во втором режиме - прерывистого потока. Кроме того, устройство 27 выбора предпочтительно также выполнено с обеспечением предоставления оператору транспортного средства возможности избирательно подавать в логическую схему 26 команду попеременно приводить в действие регулятор 22 в ручном режиме, в котором оператор может вручную регулировать или задавать расход RA через выпускное отверстие с достижением желаемого постоянного значения. Вместе с тем, логическая схема 26 может быть выполнена с обеспечением возможности приведения в действие регулятора 22 только в одном из двух режимов, описанных выше (т.е. в режиме непрерывного потока или в режиме прерывистого потока), с тем, чтобы система 10 управления не потребовала никакого устройства выбора оператором.
Смачивающая система 12 предпочтительно включает в себя совокупность линий 16 подачи текучей среды, а в наиболее предпочтительном варианте - две линии 16, каждая из которых имеет отдельное выпускное отверстие 20 и соединена с отдельным источником 14 текучей среды. Кроме того, система 10 управления предпочтительно включает в себя совокупность регуляторов 22, в наиболее предпочтительном варианте - два регулятора 22, каждый из которых оперативно соединен с отдельной одной из двух линий 16 подачи с возможностью регулирования расхода (расходов) через подсоединенную линию 16 подачи. При такой конструкции смачивающей системы 12 логическая схема 26 предпочтительно выполнена с обеспечением возможности приведения в действие каждого из регуляторов 22 отдельно и независимо от другого регулятора (других регуляторов) 22, а значит - и с обеспечением возможности независимого управления расходом RA из выпускного отверстия 20 каждой отдельной линии подачи. Каждый из вышеупомянутых основных элементов системы 10 управления согласно настоящему изобретению подробнее описан ниже.
На фиг.1 показана система 10 управления согласно настоящему изобретению, которая предпочтительно используется вместе со смачивающей системой 12 на обычном уплотняющем транспортном средстве 1, имеющем два уплотняющих вальца 2А и 2В (т.е. на «двухвальцовом» катке), используемом для уплотнения слоя материала дорожного покрытия (например, асфальта), как описано выше. При наличии такого транспортного средства 1 материал дорожного покрытия склонен прилипать к внешней поверхности 4 вальцов 2А, 2В, если вальцы 2А, 2В не покрыты или не смочены подходящей текучей средой, как описано выше и подробнее рассматривается ниже. Уплотняющее транспортное средство 1 включает в себя шасси или раму 5 транспортного средства и два узла 6 валов, каждый из которых соединяет один валец 2А или 2В с рамой 5. Внутри рамы 5 расположен дизельный двигатель 7, который служит для привода основного гидравлического насоса 8 (см., например, фиг.2), расположенного внутри рамы 5 и обеспечивающего гидравлическое давление для работы различных систем или компонентов транспортного средства 1.
Кроме того, транспортное средство 1 включает в себя два гидравлических двигателя 9 (показан только один - см. фиг.2), каждый из которых соединен с отдельным узлом 6 вала. Оба двигателя 9 приводятся в действие основным гидравлическим насосом 8, и каждый из них функционирует, обеспечивая вращение соединенного с ним вальца 2А и 2В. Как таковое, вращение вала (не показано) каждого двигателя 9 обеспечивает показание скорости вращения соединенного с ним вальца 2А или 2В, а значит - и скорости транспортного средства 1, как подробнее описано ниже. Кроме того, транспортное средство 1 также включает в себя операторскую станцию 11, расположенную на раме 5 и содержащую различные операторские устройства управления, включая устройство 27 выбора, рассмотренное выше и подробнее описываемое ниже.
В альтернативном варианте, систему 10 управления можно использовать со смачивающей системой 12 уплотняющего транспортного средства 1 другого типа, например, такого как одновальцовое уплотняющее транспортное средство 1, имеющее пару колес (не показаны), установленных с возможностью вращения на раму 5 вместо одного из вальцов - 2А или 2В. Кроме того, в рамках объема притязаний настоящего изобретения находится использование системы 10 управления с транспортным средством 1 любого другого типа, включающим в себя систему, подающую текучую среду, или смачивающую систему, например, с таким как транспортное средство для мойки улиц, в частности такое, в котором расход текучей среды, пропорциональный скорости транспортного средства, является выгодным для эксплуатации транспортного средства.
В предпочтительном варианте, текучей средой, используемой в смачивающей системе 12, является либо вода, либо смесь воды и текучей среды другого типа, такой как подходящий смачивающий или антиадгезивный агент. Более конкретно, такие подходящие другие текучие среды включают в себя эмульгаторы или разбавители на основе кремния, растворители на основе лимонной кислоты или продукты на основе моющих веществ. Хотя вышеописанные текучие среды являются предпочтительными для использования в смачивающей системе 12, в альтернативном варианте можно использовать любую другую подходящую текучую среду, а тип смачивающей текучей среды ни в коем случае не является ограничением, накладываемым на систему 10 управления согласно настоящему изобретению.
На фиг.1 и 4 изображена смачивающая система 12, которая предпочтительно включает в себя два отдельных основных контура 13А, 13В текучей среды, соединенных с рамой 5 транспортного средства, причем каждый из них обычно расположен близко к отдельному одному из вальцов 2А, 2В. Как таковой, каждый контур 13А и 13В текучей среды расположен с обеспечением возможности подачи текучей среды только на ближний валец 2А или 2В, соответственно. Вместе с тем, система 10 управления предпочтительно включает в себя только одну логическую схему 26, выполненную с обеспечением возможности управления обоими контурами 13А, 13В текучей среды, что подробнее рассматривается ниже. В предпочтительном варианте, оба гидравлических контура 13А, 13В выполнены, по существу, идентично и работают, по существу, одинаково, так что подробного описания и иллюстрации одного контура текучей среды, в частности, контура 13А текучей среды, будет достаточно для недвусмысленного раскрытия сущности системы 10 управления согласно настоящему изобретению. Кроме того, смачивающая система 12 предпочтительно включает в себя два вспомогательных гидравлических контура 15А, 15В, каждый из которых соединен с рамой 5 транспортного средства и обычно расположен близко к отдельному одному из основных контуров 13А, 13В, соответственно, а значит - близко и к одному из вальцов 2А и 2В, соответственно, что подробнее рассматривается ниже.
На фиг.2-5, показано, что каждый основной контур 13А, 13В текучей среды предпочтительно включает в себя источник 14 текучей среды, линию 16 подачи текучей среды (например, с впускным отверстием 18 и выпускным отверстием 20) и регулятор 22. Каждый из контуров 13А, 13В текучей среды дополнительно включает в себя отдельный основной насос 30, сообщающийся посредством текучей среды со связанной с ним линией 16 подачи в «оперативном» положении (т.е. в отличие от физического места нахождения) между источником 14 текучей среды и выпускным отверстием 20 линии подачи. Каждый насос 30 выполнен с обеспечением возможности эффективной подачи текучей среды из источника 14 к выпускному отверстию 20 линии подачи (и через это отверстие). Кроме того, подсоединение каждого насоса 30 в связанный с ним контур 13А или 13В текучей среды делит линию 16 подачи текучей среды на два участка 17 и 19 линии подачи. Более конкретно, первый участок 17 линии подачи проходит меду источником 14 текучей среды и впускным отверстием 34 насоса и включает в себя впускное отверстие 18 линии подачи, а второй участок 19 линии подсоединен к выпускному отверстию 36 насоса и включает в себя выпускное отверстие 20 линии подачи, что подробнее рассмотрено ниже.
Кроме того, каждый гидравлический контур 13А, 13В предпочтительно включает в себя распределитель 21 текучей среды, сообщающийся посредством текучей среды с выходным отверстием 20 соответствующей линии и выполненный с обеспечением распыления или диффузии текучей среды в основном равномерно по соответствующему вальцу 2А или 2В. Распределитель 21 предпочтительно подсоединен ко второму участку 19 линии так, что поток текучей среды через выпускное отверстие 20 линии подачи попадает в распределитель 21 и распределяется по поперечной ширине W ближнего вальца 2А или 2В. В предпочтительном варианте, каждый из распределителей 21 выполнен в виде «распылительной линейки» 23, которая известна в области уплотняющих транспортных средств. Более конкретно, каждая распылительная линейка 23 включает в себя удлиненное полое тело 29, имеющее впускное отверстие 31, сообщающееся посредством текучей среды с выпускным отверстием 20 линии подачи, и совокупность выпускных каналов 33, отстоящих друг от друга вдоль тела 29. Кроме того, каждая распылительная линейка 23 соединена с рамой 5 транспортного средства таким образом, что тело 29 проходит в основном параллельно оси 3 ближнего вальца 2А, 2В. Как таковой, поток из выпускного отверстия 20 линии подачи в основном равномерно распределяется по поперечной ширине W вальца 2А, 2В, покрывая, по существу, всю внешнюю поверхность 4 вальца.
Хотя описанная конструкция распылительной линейки 23 является предпочтительной, распределитель 21 может быть выполнен любым другим подходящим образом, который обеспечивает эффективное распределение текучей среды по внешней поверхности 3 вальца, например, таким как распылительная головка с многочисленными каналами, проходящими под углами наружу от общего центра (не показано). В альтернативном - хотя и не предпочтительном - варианте, смачивающая система может быть выполнена без распределителей 21 так, что текучая среда в ней потечет из выпускного отверстия 20 каждой линии подачи непосредственно на внешнюю поверхность 4 ближнего барабана 2А или 2В.
На фиг.2 и 5 показано, что каждый источник 14 текучей среды предпочтительно расположен на раме 5 на отдельном одном из концов 5а, 5b рамы, вследствие чего оказывается расположенным близко к одному из вальцов 2А или 2В. В наиболее предпочтительном варианте, каждый источник 14 текучей среды выполнен в виде в основном прямоугольного бака 53, имеющего криволинейную вогнутую нижнюю поверхность 53а, которая «сопрягается» с выпуклой внешней поверхностью участка 5с ниши под колесо, имеющегося в раме 5, и расположен в основном заподлицо с окружающими стенками рамы. Однако каждый источник 14 текучей среды можно выполнить любым другим подходящим образом (например, в виде цилиндрического вальца) и/или расположить в любом другом подходящем месте, например, можно выполнить в виде единственного источника текучей среды (не показан), расположенного под операторской станцией 11 и подающего текучую среду в оба контура 13А и 13В.
На фиг.4-6 показано, что смачивающая система 12 предпочтительно включает в себя два вспомогательных гидравлических контура 15А, 15В для обеспечения «поддержки» в случае отказа основных контуров 13А и 13В текучей среды. Помимо этого, вспомогательные контуры 15А, 15В могут работать одновременно с основными контурами 13А, 13В для подачи большего совокупного количества или объема текучей среды на внешние поверхности 4 вальцов 2А и 2В. Хотя вспомогательные контуры 15А, 15В в основном аналогичны основным гидравлическим контурам 13А, 13В, эти вспомогательные контуры 15А, 15В не включают в себя регуляторы 22 и не конфигурированы с обеспечением возможности функционирования тем же образом, который описан здесь применительно к основным гидравлическим контурам 13А, 13В. Каждый вспомогательный контур 15А, 15В включает в себя линию 16' подачи, имеющую выпускное отверстие 20', расположенное близко к одному из вальцов 2А или 2В и сообщающееся посредством текучей среды с линией 16 подачи ближнего основного контура 13А, 13В, соответственно. Более конкретно, клапан-делитель 38 потока соединяет каждую пару близко расположенных линий 16 и 16' таким образом, что они сообща используют внешний субучасток 17b первой линии (что рассматривается ниже), впускное отверстие 18 и источник 14 текучей среды. Кроме того, каждый вспомогательный контур 15А, 15В включает в себя насос 30', расположенный близко к насосу 30 соответствующего основного контура 13А или 13В текучей среды, и распылительную линейку 23', сообщающуюся посредством текучей среды с выпускным отверстием 20' и простирающуюся по всей ширине соответствующего вальца 2А или 2В. Хотя наличие вспомогательных контуров 15А, 15В и является предпочтительным, смачивающая система может быть выполнена без каких-либо вспомогательных контуров текучей среды, или контуры 15А 15В могут быть выполнены по-другому. Обращаясь к фиг.2-7, отмечаем, что каждый насос 30 расположен в подходящем месте на раме 5 транспортного средства близко к соответствующему вальцу 2А или 2В, а в наиболее предпочтительном варианте каждый насос установлен внутри отдельного отсека 5d рамы, находящегося рядом с каждым из вальцов 2А и 2В. В общем случае, каждый насос 30 предпочтительно выполнен как известный обычный насос, а в наиболее предпочтительном варианте - как объемный диафрагменный насос. Более конкретно, в предпочтительном варианте каждый насос 30 представляет собой насос модели № 8006-1420-820, изготавливаемый и поставляемый в промышленных масштабах фирмой SHURFlo Pump Manufacturing Company, г. Санта-Анна, штат Калифорния, США. Поскольку объемные насосы хорошо известны, подробное описание насосов 30 необязательно, однако они будут рассмотрены вкратце, чтобы внести дополнительную ясность в некоторые аспекты настоящего изобретения, которые будут описаны ниже.
На фиг.7 показано, что каждый насос 30 предпочтительно включает в себя корпус 32, в котором заключена внутренняя камера 35 и который имеет впускное отверстие 34 и выпускное отверстие 36, каждое из которых сообщается посредством текучей среды с камерой 35. Каждый из насосов 30 имеет подвижный элемент, в наиболее предпочтительном варианте - диафрагму 39, выполненную с обеспечением возможности возвратно-поступательного движения для периодического изменения объема камеры 35. Кроме того, двигатель 40 имеет вал 40а, оперативно соединенный с диафрагмой 39 посредством соединительной тяги 41. При эксплуатации двигатель 40 приводит в движение соединительную тягу 41, так что эта тяга 41 попеременно отклоняет диафрагму 9 в первом и втором противоположных направлениях. Отклонение диафрагмы 39 в первом направлении увеличивает объем камеры, «вынуждая» текучую среду течь в камеру 35 через впускное отверстие 34. Отклонение диафрагмы 39 во втором направлении уменьшает объем камеры, «вынуждая» текучую среду течь из камеры 35 через выпускное отверстие 36. Как таковая, текучая среда вытекает из выпускного отверстия 36 насоса и попадает во второй участок 19 линии подачи в виде дискретных «импульсов» конкретного количества текучей среды, причем частота этих импульсов определяет расход во второй участок 19 линии.
Кроме того, каждый насос 30 предпочтительно выполнен с обеспечением возможности работы с постоянной «скоростью»; иными словами, вал 40а двигателя вращается в основном с постоянной скоростью, так что частота отклонения диафрагмы 39 насоса, а значит - и частота импульсов воды, вытекающей из выпускного отверстия 36 насоса, является, вообще говоря, постоянной. В альтернативном варианте насос 30 можно выполнить с обеспечением возможности работы с разными производительностями или скоростями либо путем изменения скорости вала 40а, либо путем изменения длины хода соединительной тяги 41 для регулирования объема текучей среды в каждом из импульсов текучей среды, что подробнее рассматривается ниже.
На фиг.3, 6 и 7 показано, что двигатель 40 предпочтительно является электрическим двигателем, электрически соединенным с системой 10 управления посредством электрической схемы 55. В наиболее предпочтительном варианте, двигатель 40 представляет собой встроенный компонент предпочтительного насоса модели № 8006-1420-820. При наличии электрического двигателя 40, смачивающая система 12 дополнительно включает в себя источник 57 электропитания, расположенный в подходящем месте внутри рамы 5 транспортного средства, как показано на фиг.3. В предпочтительном варианте, источник 57 питания представляет собой основной генератор (не показан), приводимый в действие основным двигателем 7 уплотняющего транспортного средства 1 и используемый для подачи электропитания в различные системы транспортного средства 1, но может - в альтернативном варианте - питаться и от отдельного генератора или от аккумуляторной батареи. В качестве дополнительной альтернативы отметим, что двигатель 40 может быть гидравлическим или пневматическим двигателем, либо каждый насос 30 может приводиться в действие гидравлическим, электрическим или пневматическим вращательным или линейным исполнительным механизмом другого типа, подходящим для насоса 30 конкретного типа и имеющим источник 57 электропитания подходящего типа для конкретного типа насоса и/или двигателя (например, это может быть отдельный гидравлический насос или компрессор).
На фиг.2 показано, что в первой предпочтительной конструкции каждый регулятор 22 представляет собой шунтирующее устройство 42 для текучей среды, включающее в себя шунтирующую линию 43 текучей среды, сообщающуюся посредством текучей среды со связанной с ней линией 16 подачи, и клапан 44, управляющий течением по шунтирующей линии 43, а значит - и через выпускное отверстие 20 линии подачи. Шунтирующая линия 43 текучей среды имеет впускное отверстие 43а, сообщающееся посредством текучей среды с линией 16 подачи текучей среды, и выпускное отверстие 43b, сообщающееся посредством текучей среды либо с источником 14 текучей среды (что показано пунктирной линией на фиг.2), либо - и это предпочтительно - с впускным отверстием 34 (что показано сплошной линией на фиг.2) посредством клапана-делителя 45 потока. Клапан 44 оперативно соединен с логической схемой 26 и сообщается посредством текучей среды с шунтирующей линией 43. Кроме того, клапан 44 выполнен с обеспечением возможности регулирования расхода через шунтирующую линию 43 таким образом, что происходит инверсное регулирование расхода RA через шунтирующую линию 43. Более конкретно, шунтирующая линия 43 текучей среды перенаправляет или отводит, по меньшей мере, часть потока FP текучей среды, существующего в соответствующем насосе 30 (т.е. идущем из выпускного отверстия 36 насоса), от выпускного отверстия 20 линии подачи обратно либо в источник 14 текучей среды, либо - что наиболее предпочтительно - обратно и непосредственно во впускное отверстие 34 насоса. Остальная часть FA потока текучей среды проходит через выпускное отверстие 20 линии подачи, при этом клапан 44 устанавливается (например, под управлением логической схемы 26) таким образом, что эта остальная часть FA потока текучей среды, проходящая через выпускное отверстие 20, в основном пропорциональна измеренной скорости S транспортного средства.
Следовательно, шунтирующего типа регулятор 42 текучей среды предназначен главным образом для разделения или расщепления потока FP текучей среды, поступающей из выпускного отверстия 36 насоса, на две отдельные части потока: первую или шунтирующую часть FS потока, проходящую по шунтирующей линии 43, и вторую или подаваемую часть потока, обеспечивающую подаваемый поток FA и проходящую через выпускное отверстие 20 линии подачи. Кроме того, клапан 44 выполнен с возможностью расположения или конфигурирования таким образом, что в предпочтительном варианте обеспечивается изменение каждой из обеих частей FS и FA потока между полным количеством или объемом текучей среды, вытекающей из выпускного отверстия 36 насоса, и, по существу, нулевым количеством или объемом потока FP из выпускного отверстия насоса, причем обе части FS и FA потока обратно пропорциональны друг другу.
В предпочтительном варианте, клапан 44 соединен непосредственно во вторым участком 19 линии подачи или расположен непосредственно на этом участке таким образом, что этот клапан 44 делит второй участок 19 линии на два субучастка: внутренний субучасток 19а, проходящий между выпускным отверстием 36 насоса и клапаном 44, и внешний субучасток 19b, проходящий между клапаном 44 и выпускным отверстием 20 линии подачи. Кроме того, впускной конец 43а шунтирующей линии 43 предпочтительно соединен непосредственно с клапаном 44, чтобы тем самым соединить шунтирующую линию 43 с линией 16 подачи, а выпускной конец 43b шунтирующей линии предпочтительно соединен с первым участком 17а линии подачи посредством клапана-делителя 45, что рассмотрено выше. Как таковая, шунтирующая линия 43, по существу, рециркулирует текучую среду из выпускного отверстия 36 насоса обратно во впускное отверстие 34 насоса.
На фиг.2 также показано, что клапан 44 предпочтительно является трехпутевым гидрораспределителем, включающим в себя впускное отверстие 46, соединенное с внутренним субучастком 19а линии, и два выпускных отверстия 47 и 48. Первое выпускное отверстие 47 соединено с внешним субучастком 19b линии, а второе выпускное отверстие 48 соединено с шунтирующей линией 43 (т.е. с концом 43а). Кроме того, клапан 44 выполнен с обеспечением возможности регулирования между первым и вторым «предельными» положениями и возможности прохождения через все положения между ними (что рассматривается ниже) для создания потока текучей среды с изменяемым распределением между внешним субучастком 19b линии подачи текучей среды (а значит - и выпускным отверстием 20 линии подачи) и шунтирующей линией 43. В первом предельном положении (не показано) клапан 44 расположен или выполнен с обеспечением возможности направления, по существу, всего потока текучей среды, поступающего во впускное отверстие 46, в выпускное отверстие 47, сообщающееся с линией 16 подачи текучей среды. Иными словами, при такой настройке клапан 44, в сущности, направляет, по существу, весь начинающийся в источнике 14 текучей среды поток FP из насоса 30 через выпускное отверстие 20 линии подачи в распылительную линейку 23 (т.е., FA=FP, FS=0). Таким образом, в первом предельном положении клапан 44 обеспечивает максимальный расход RA текучей среды на соответствующий валец 2А или 2В.
Во втором предельном положении (не показано) клапан 44 расположен или выполнен с обеспечением возможности направления, по существу, всего потока текучей среды, поступающего в клапан 44, т.е. начинающегося в источнике 14 текучей среды, в выпускное отверстие 48, сообщающееся с шунтирующей линией 43 текучей среды. Как таковой, поток Fp, по существу, рециркулируется из выпускного отверстия 36 насоса обратно во впускное отверстие 34 насоса (т.е. FA = 0, FS = FP). Таким образом, во втором предельном положении расход RA текучей среды через выпускное отверстие 20 линии подачи, по существу, равен нулю (т.е. потока, по существу, нет), так что никакое количество текучей среды не направляется на соответствующий валец 2А или 2В. Помимо этого каждый клапан 44 выполнен с возможностью регулирования для достижения совокупности промежуточных положений или конфигураций (ни одно из которых не показано или ни одна из которых не показана) между первым и вторым предельными положениями. Каждое промежуточное положение клапана обуславливает расход RA текучей среды через выпускное отверстие 20 линии подачи, имеющий отдельное значение, отличающееся от значений расхода RA текучей среды, обуславливаемых всеми остальными промежуточными положениями клапана. Кроме того, регулированием клапана 44 для достижения любого из положений этого клапана управляет логическая схема 26, как рассмотрено выше и подробнее описано ниже.
В предпочтительном варианте, каждый из клапанов 44 имеет электрический привод и соединен с логической схемой 26, так что каждый клапан 44 приводится в действие управляющими сигналами, принимаемыми из логической схемы 26, как подробнее описано ниже. В случае предпочтительной конструкции клапанов, каждый клапан 44 дополнительно включает в себя электрический исполнительный механизм 49, предпочтительно - линейный исполнительный механизм, а в наиболее предпочтительном варианте - соленоид 51. Кроме того, каждый из клапанов 44 предпочтительно выполнен как золотниковый клапан, имеющий скользящий золотник 53, приводимый в действие соленоидом 51 для регулирования потока текучей среды, попадающий во впускное отверстие 46, между двумя выпускными отверстиями 47 и 48 клапана.
Хотя вышеописанные конфигурация и компоновка клапана 44 шунтирующего устройства 42 для текучей среды являются предпочтительными в настоящее время, клапан 44 может быть выполнен или скомпонован любым другим подходящим образом. Например, клапан 44 может быть двухпутевым гидрораспределителем (не показан), выполненным с обеспечением возможности непосредственного управления потоком только по шунтирующей линии 43. Более конкретно, клапан 44 может иметь впускное отверстие, сообщающееся либо с внешним субучастком 19b линии подачи текучей среды, либо с шунтирующей линией 43, и единственное выпускное отверстие, сообщающееся с шунтирующей линией 43 (эта конструкция не показана на чертежах). Такая альтернативная конструкция обеспечивает возможность простого регулирования расхода между впускным отверстием клапана и его выпускным отверстием, а значит - и возможность регулирования количества текучей среды, шунтируемой или перенаправляемой из линии 16 подачи. Иными словами, когда клапан 44 находится в первом или полностью открытом положении, из линии 16 подачи отводится максимальная часть потока, что уменьшает объем части текучей среды, протекающей через выпускное отверстие 20 на валец 2А или 2В. Во втором, полностью закрытом положении, никакой поток из линии 16 подачи не шунтируется, так что весь поток FP из соответствующего насоса 30 направляется на валец 2А или 2В. Однако такая компоновка клапана не является предпочтительной в настоящее время, потому что она, по существу, не гарантирует возможности прерывания или прекращения поступления потока на вальцы 2А, 2В, но может оказаться желательной, если во всех случаях предпочтителен непрерывный, но изменяемый поток текучей среды на вальцы 2А, 2В.
В качестве дополнительного примера отметим, что клапан 44 каждого из шунтирующих устройств 42 может иметь подвижный «рабочий» элемент любого типа, такой как шарик, тарелку или скользящую пластину, и/или может приводиться в действие электрическим исполнительным механизмом другого типа, таким как электрический двигатель. В качестве еще одних примеров отметим, что каждый из клапанов 44 может в альтернативном варианте включать в себя гидравлический или пневматический исполнительный механизм, например, такой как гидравлический поршень или управляющий клапан, приводимый в действие посредством гидравлического управляющего сигнала, или может быть снабжен автоматически управляемым клапаном любого другого типа. Объем притязаний настоящего изобретения включает в себя вышеописанные альтернативы и все остальные подходящие конфигурации шунтирующего устройства 42, для текучей среды, которые гарантируют функционирование системы 10 управления согласно настоящему изобретению, в основном такое, как описанное выше.
На фиг.3 показано, что во второй предпочтительной конструкции каждый регулятор 22 представляет собой регулятор 50 насоса, выполненный с обеспечением возможности приведения в действие одного из насосов 30 для регулирования расхода через выпускное отверстие 20 соответствующей линии подачи. Более конкретно, регулятор 50 насоса регулирует насос 30 для изменения выходного потока FP насоса и тем самым регулирует расход через подсоединенный второй участок 19 линии и из выпускного отверстия 20 линии подачи (т.е. расход RA). В предпочтительном варианте, каждый из регуляторов 50 насосов также выполнен с обеспечением возможности начала приведения в действие насоса 30 и - в альтернативном варианте - остановки работы соответствующего насоса 30. Иными словами, каждый регулятор 50 выполнен с обеспечением возможности запуска или «включения» соответствующего насоса 30, когда насос 30 находится в нерабочем состоянии (т.е. отключен), так что расход RA через выпускное отверстие 20 линии подачи увеличивается от примерно нулевого расхода до некоторого желаемого расхода. Кроме того, регуляторы 50 насосов выполнены с обеспечением возможности остановки работы или «отключения» насосов 30 во время работы насосов, так что поток FA текучей среды через выпускное отверстие 20 линии подачи уменьшается с уменьшением расхода RA от некоторой величины до примерно нулевого расхода.
В предпочтительном варианте, каждый из регуляторов 50 насосов представляет собой исполнительный механизм 52 двигателя, оперативно соединенный с соответствующим двигателем 40 насоса и выполненный с обеспечением возможности регулирования скорости вращения вала 40а двигателя таким образом, что обеспечивается пропорциональное регулирование расхода RA через выпускное отверстие 20 линии подачи. Иными словами, каждый из регуляторов 50 насосов заставляет вал 40а соответствующего двигателя вращаться быстрее для увеличения расхода из выпускных отверстий 36 насосов, и попеременного уменьшения скорости вращения вала 40а соответствующего двигателя и уменьшения расхода из выпускного отверстия 36 насоса. В предпочтительном варианте каждый исполнительный механизм 52 двигателя представляет собой электрический регулятор напряжения, а в наиболее предпочтительном варианте - широтно-импульсный модулятор (ШИМ). Являясь устройством широтно-импульсной модуляции, исполнительный механизм 52 двигателя выполнен с обеспечением возможности изменения тока, прикладываемого к соответствующему двигателю 40 насоса источником 57 электропитания, чтобы таким образом изменять скорость вращения вала 40а двигателя. Поскольку устройства широтно-импульсной модуляции хорошо известны специалистам в области электрических систем и систем управления, подробное описание такого устройства необязательно и находится за рамками объема настоящего описания.
Однако в альтернативном варианте исполнительные механизмы 52 двигателей могут представлять собой исполнительный механизм любого другого типа, выполненный с обеспечением возможности изменения скорости двигателя, например, переменный резистор, который изменяет ток, текущий через двигатель 40, трансмиссионное устройство, соединенное с валом 40а двигателя и соединительной тягой 41 и выполненное с обеспечением возможности изменения отношения скоростей между валом 40а двигателя и насосом 30, или любое другое подходящее устройство для изменения скорости вращения двигателя 40 и/или изменения скорости вращения, сообщаемой насосу 30 валом 40а двигателя (не показано). Кроме того, регуляторы 50 насосов в альтернативном варианте могут быть снабжены любым другим подходящим устройством (т.е. отличным от исполнительного механизма двигателя) для регулирования работы насоса. Например, каждый из регуляторов 50 насосов может иметь устройство (не показано), выполненное с обеспечением возможности регулирования объема текучей среды, протекающей в насос 30 и из него, таким образом, что скорость двигателя 40 остается в основном постоянной. Такое устройство может быть выполнено с обеспечением возможности регулирования длины хода соединительной тяги 41, прикрепленной к диафрагме 39 в предпочтительном диафрагменном насосе 30, чтобы таким образом увеличить параметр отклонения диафрагмы 39. Объем притязаний настоящего изобретения охватывает эти и другие подходящие устройства для регуляторов 50 насосов, выполненные с возможностью изменения работы насоса и гарантирующие функционирование системы 10 управления, в основном такое, как указанное выше в данном описании.
На фиг.2 и 3 показано, что система 10 управления предпочтительно включает в себя два датчика 24 скорости (из которых показан лишь один), причем каждый датчик 24 выполнен с обеспечением возможности восприятия или измерения количества оборотов вальца в единицу времени и передачи такой информации (например, в виде электронных сигналов) в логическую схему 26. Логическая схема 26 может быть выполнена с обеспечением возможности приведения в действие регуляторов 22 путем непосредственного использования «необработанных» измерений скорости, выражаемой количеством оборотов вальцов в единицу времени, или может преобразовывать скорость вращения вальца в скорость движения транспортного средства на основании известных размеров вальца, т.е. скорость S транспортного средства в этом случае равна угловой скорости вальца, умноженной на диаметр вальца. Очевидно, что скорость вращения каждого вальца 2А и 2В должна быть одной и той же, так что можно использовать единственный датчик 24 скорости для вычисления или определения скорости S транспортного средства. Однако предпочтительны два датчика 24 скорости, поскольку логическая схема 26 выполнена с возможностью сравнения измерений скорости транспортного средства, полученных от каждого из двух датчиков 24 скорости, для обнаружения таких проблем, как проскальзывание вальцов или неправильное функционирование датчиков 24, которое может негативно повлиять на воспринятую или измеренную скорость вальцов.
В предпочтительном варианте, каждый датчик 24 скорости представляет собой датчик 58, основанный на эффекте Холла, расположенный внутри двигателя 9 узла 6 вала каждого из вальцов и выполненный с обеспечением возможности восприятия вращения вала (не показанный) двигателя 9. Логическая схема 26 вычисляет скорость S транспортного средства исходя из измерений вращения вала двигателя датчиком 58, основанным на эффекте Холла, с использованием известных соотношений между скоростью двигателя и скоростью вращения вальца, а также между скоростью вальца и скоростью S транспортного средства (как обсуждалось выше). Более конкретно, датчики 58, основанные на эффекте Холла, воспринимают магнитные импульсы, генерируемые за счет вращения мишеней датчиков (не показаны), установленных на валу двигателя (не показан), причем количество импульсов за оборот вала является постоянным, так что логическая схема 26 вычисляет скорость S транспортного средства, исходя из количества этих импульсов за конкретную единицу времени и из известной пропорциональной взаимосвязи между вращением двигателя и вращением вальца (например, десять оборотов вала двигателя за каждый оборот вала вальца).
Кроме того, вследствие принципа, по которому работают датчики 58, основанные на эффекте Холла, логическая схема 26 способна контролировать или определять вращательное перемещение dR вальцов 2А, 2В просто путем слежения за количеством импульсов. Следовательно, каждый датчик 58 скорости, основанный на эффекте Холла, также функционирует как датчик перемещения, вследствие чего системе 10 управления предпочтительно не требуется отдельный датчик перемещения. В альтернативном варианте, система 10 управления может дополнительно включать в себя один или более датчиков 25 перемещения, наличие которых обозначено штрих-пунктирными линиями на фиг.2 и 3, каждый из которых выполнен с обеспечением возможности восприятия вращательного перемещения dR ближнего вальца 2А или 2В. Отдельные датчики 25 перемещения могут потребоваться в случае, если, например, каждый из датчиков 25 скорости представлен в виде альтернативного устройства, например такого, как приемник Системы глобального позиционирования (GPS), рассматриваемый ниже. Датчики 25 перемещения могут быть представлены в виде любого подходящего устройства, выполненного с возможностью измерения вращательного перемещения dR вальцов 2А, 2В, такого как оптический кодер или прерыватель, скомпонованный с обеспечением возможности восприятия вращательного перемещения dR вала 9а двигателя, узла 6 моста вальца, или даже самих вальцов 2А, 2В.
Каждый из датчиков 58, основанных на эффекте Холла, предпочтительно является промышленно поставляемым датчиком, а в наиболее предпочтительно варианте является «датчиком скорости», изготавливаемым и поставляемым фирмой Porclain Hydraulics, Inc., Йорквилль, штат Висконсин, США. Хотя датчик 58, основанный на эффекте Холла, является предпочтительным, датчики 24 скорости могут быть выполнены в виде датчика любого другого подходящего типа, выполненного с возможностью измерения, по меньшей мере, скорости транспортного средства. Например, датчик 24 скорости может быть выполнен в виде оптического кодера (не показан), воспринимающего вращение тех валов 8а двигателей, которые являются короткими валами, соединяющими вальцы 2А, 2В с рамой 5 транспортного средства, или в виде любой другой вращающейся части транспортного средства 1. В качестве дополнительного примера отметим, что датчик 24 скорости может быть представлен в виде приемника GPS (не показан), измеряющего полную скорость транспортного средства, или в виде любого другого датчика или устройства, выполненного с возможностью выдачи показания скорости транспортного средства 1 и/или вальцов 2А, 2В. Объем притязаний настоящего изобретения охватывает эти и любые другие подходящие устройства в качестве датчиков 24 скорости и датчиков 25 перемещения, которые позволяют системе 10 управления функционировать в основном так, как описано выше.
На фиг. 2, 3 и 8-11 показаны структура и функции логической схемы 26, причем в том смысле, в каком они употребляются в связи с логической схемой 26, термины "выполненная" и "конфигурация" следует считать охватывающими все различные возможности формирования и компоновки логической схемы любого известного типа. Как таковые, эти термины включают в себя - но не в ограничительном смысле - разводку проводников или изготовление аналоговой электрической логической («зашитой» или иной) схемы, изготовление и/или программирование, установку программного обеспечения или компоновку, предусматривающую выдачу иным образом команд в цифровую электрическую логическую схему, и изготовление или формирование иным образом гидравлической или пневматической логической схемы. Конкретная структура логической схемы 26 не является столь уж важной, поскольку реальные функции, выполняемые схемой 26, подробно рассмотрены в данном описании. Обычный специалист в области управления имеет достаточно знаний и способностей, чтобы изготовить и/или запрограммировать подходящую логическую схему 26, которая способна взаимодействовать с датчиками 24, с регулятором (регуляторами) 22 и с другими компонентами настоящего изобретения тем образом, который здесь подробно описан.
Как описано выше, логическая схема 26 предпочтительно выполнена с обеспечением возможности попеременного приведения в действие регуляторов 22, по меньшей мере, в двух разных режимах - либо в режиме непрерывного потока, либо в режиме прерывистого потока. В режиме непрерывного потока логическая схема 26 автоматически приводит в действие регуляторы 22, предпочтительно - либо посредством клапана 44 шунтирующего устройства 42 для текучей среды, либо посредством исполнительного механизма 52 двигателя, чтобы поддержать расход RA через выпускное отверстие 20 линии подачи, в основном, пропорциональным измеренной скорости S транспортного средства. Более конкретно, при наличии шунтирующего регуляторного устройства 42 для текучей среды, логическая схема 26 выполнена с обеспечением возможности регулирования клапана 44, например, путем управления перемещением соленоида 51 для увеличения потока FS текучей среды через шунтирующую линию 43, когда измеренная скорость S транспортного средства уменьшается, и пропорционального уменьшения таким образом расхода RA через выпускное отверстие 20 линии подачи. Логическая схема 26 также выполнена с обеспечением возможности попеременного регулирования клапана 44 для уменьшения потока FS текучей среды через шунтирующую линию 43, когда измеренная скорость S транспортного средства увеличивается, и пропорционального увеличения таким образом расхода RA через выпускное отверстие 20 линии подачи.
Кроме того, при наличии регуляторного устройства 50 насоса логическая схема 26 выполнена с обеспечением возможности приведения в действие регулятора 50 насоса таким образом, что регулятор 50 регулирует насос 30, увеличивая расход из выпускного отверстия 36 насоса, когда измеренная скорость S транспортного средства увеличивается, для пропорционального увеличения расхода RA через выпускное отверстие 20 линии подачи. Логическая схема 26 в альтернативном варианте приводит в действие регулятор 50 насоса для регулирования насоса 30 для уменьшения расхода из выпускного отверстия 36 насоса, когда измеренное значение скорости S транспортного средства уменьшается, чтобы пропорционально уменьшить расход RA через выпускное отверстие 20 линии подачи. Более конкретно, логическая схема 26 выполнена с обеспечением возможности приведения в действие предназначенного для двигателя исполнительного устройства 52 широтно-импульсной модуляции, чтобы отрегулировать ток, прикладываемый к двигателю 40 таким образом, что скорость вала 40а двигателя оказывается в основном пропорциональной скорости S транспортного средства. Иными словами, устройство 52 широтно-импульсной модуляции увеличивает прикладываемое напряжение для увеличения скорости вала двигателя, а значит - и расхода RA через выпускное отверстие, когда измеренная скорость S двигателя увеличивается, и уменьшает прикладываемое напряжение для уменьшения скорости вала двигателя и расхода RA через выпускное отверстие, когда измеренная скорость S двигателя уменьшается.
На фиг.2, 3 и 8 показано, что логическая схема 26 предпочтительно выполнена с обеспечением возможности регулирования каждого регулятора 22 до достижения одной из совокупности конкретных «уставок» (т.е. конфигураций, положений клапанов, уставок напряжений, и т.д.), позволяющих получить некоторое конкретное значение расхода RA для каждого из совокупности измеренных значений скорости S транспортного средства. Иными словами, логическая схема 26 автоматически регулирует регуляторы 22 для достижения конкретной уставки, которая предварительно определена и в результате которой достигается поток FA через выпускное отверстие с расходом RA, равным желаемому значению, которое в основном пропорционально конкретному значению скорости S транспортного средства. Как таковая, логическая схема 26 приводит в действие регуляторы 22 в режиме управления «с разомкнутым контуром», так что реальное измерение расхода RA не требуется. Например, если упомянутая схема выполнена в виде цифровой электрической логической схемы, то эту логическую схему 26 можно запрограммировать на регулирование клапана 44 с достижением конкретной, предварительно заданной уставки клапана, или на то, чтобы заставить устройство 52 широтно-импульсной модуляции прикладывать конкретное, предварительно заданное напряжение к насосу 30, когда датчик 24 скорости определяет, что скорость S транспортного средства находится на уровне некоторого конкретного значения или в пределах некоторого конкретного диапазона значений.
Вместе с тем, систему 10 управления согласно настоящему изобретению можно снабдить датчиком 69 расхода (фиг.2), оперативно соединенным с логической схемой 26 и выполненным с возможностью измерения расхода RA через выпускное отверстие 20 линии подачи. На фиг.2, 3 и 9 показано, что если система 10 управления имеет датчик 69 расхода, то логическую схему 26 можно выполнить с обеспечением возможности генерирования или хранения совокупности разных желаемых значений vD расхода RA, причем каждое желаемое значение vD расхода RA соответствует отдельному одному из совокупности измеренных значений или диапазонов значений скорости S транспортного средства. Тогда логическую схему 26 также можно выполнить с обеспечением возможности сравнения измеренных значений vS расхода RA с желаемыми значениями vD и последующего регулирования регуляторов 22 до тех пор, пока измеренное значение vS расхода не станет равным желаемому значению vD расхода, методом, характерным для контроллера «с замкнутым контуром». Например, если логическая схема 26 выполнена в виде цифровой электрической схемы, логическую схему 26 можно запрограммировать на сравнение измеренного значения vS расхода с хранимым желаемым значением vD расхода для измеренного в текущий момент значения скорости S, с последующим регулированием клапанов 44 или обеспечением возможности регулирования посредством устройств 52 широтно-импульсной модуляции тока, приложенного к насосам 30, до тех пор, пока измеренные и хранимые значения расхода RA не станут в основном равными.
На фиг.11 показано, что когда регуляторы 22 работают в режиме непрерывного потока, логическая схема 26 также предпочтительно выполнена с обеспечением возможности поддержания конкретного соотношения между расходом RA через выпускное отверстие 20 линии подачи и скоростью S транспортного средства, причем упомянутое соотношение именуется далее «коэффициентом смачивания» RW, в общем случае являющимся постоянной величиной. Коэффициент RW смачивания, вычисляемый в результате деления расхода RA, получаемого в выпускном отверстии или обуславливаемого подачей текучей среды, на скорость S транспортного средства, обеспечивает показание количества или объема текучей среды, подаваемой выпускным отверстием 20 каждой линии подачи на внешнюю поверхность 4 соответствующего вальца 2А или 2В. Логическая схема 26 приводит в действие каждый регулятор 22 с целью регулирования расхода RA через соответствующее выпускное отверстие 20 в соответствии с потребностью поддержания коэффициента RW смачивания на уровне, в основном, постоянного значения.
Чтобы проиллюстрировать это, предположим, например, что насос 30 создает максимальный выходной расход на уровне 1,2 галлона в минуту (гал/мин), а максимальная скорость S транспортного средства составляет 800 футов в минуту (фут/мин) (что соответствует примерно 9 миль/час). Если расход RA через выпускное отверстие 20 измеряется в таких единицах, как гал/мин, а скорость S транспортного средства 1 измеряется в таких единицах, как футы в минуту (фут/мин) (и предпочтительно воспринимается путем измерения количества оборотов вальца 2А или 2В в мин (об/мин)), то логическую схему 26 можно конфигурировать с обеспечением возможности поддержания коэффициента RW смачивания на уровне значения 1,5×10-3 галлонов на каждый фут (гал/фут), проходимый транспортным средством 1. Следовательно, если скорость S транспортного средства изменяется от 400 фут/мин (4,5 мили/час) (S1 на фиг.9) до 800 фут/мин (S2 на фиг.2), то логическая схема 26 приводит в действие регулятор 22 для увеличения расхода RA через выпускное отверстие 20 линии подачи от примерно 0,6 гал/мин до примерно 1,2 гал/мин, тем самым поддерживая коэффициент RW смачивания на уровне постоянного значения 1,5×10-3 гал/фут. Хотя в вышеуказанном примере предполагаются конкретная производительность насоса и максимальная скорость S транспортного средства, производительность насоса и/или максимальная возможная скорость транспортного средства могут принимать любое другое подходящее значение. Кроме того, хотя в этом примере расход RA и скорость S транспортного средства приведены в таких единицах, как «гал/мин» и «фут/мин», соответственно, расход RA в линии подачи, скорость S транспортного средства и коэффициент RW смачивания можно измерять в любых других подходящих единицах, при этом можно измерять, например, скорость S в милях в час (миль/час) или оборотах вальца в минуту (об/мин), или прикладываемый расход RA можно измерять в литрах в минуту (л/мин).
Кроме того, логическая схема 26 также предпочтительно выполнена таким образом, что коэффициент RW смачивания оказывается изменяемым или регулируемым с обеспечением возможности достижения совокупности разных значений, как показано на фиг.11. Как таковая, система 10 управления предпочтительно содержит также, по меньшей мере, одно регулировочное устройство 59, оперативно соединенное с логической схемой 26 и выполненное с обеспечением возможности регулирования логической схемы 26 для изменения значения коэффициента RW смачивания, поддерживаемого схемой 26, что подробнее обсуждается ниже. Например, регулировочное устройство 59 можно использовать для регулирования логической схемы 56 таким образом, что коэффициент RW смачивания будет изменяться от значения примерно 1,5×10-3 гал/фут до значения примерно 0,9×10-3 гал/фут или 0,63×10-3 гал/фут, как показано на фиг.9. Регулировочное устройство 59 предпочтительно представляет собой переменный резистор 61, регулируемый ручкой, например, потенциометр или реостат, расположенный на консоли управления (не показана) в операторской станции 11 и электрически соединенный с каналом 64 ввода цифровой электрической схемы 60 (рассматриваемой ниже). В альтернативном варианте, регулировочное устройство 59 может быть любым другим подходящим устройством, выполненным с возможностью регулирования логической схемы 26, таким как кнопка, вводящая подходящие команды программы в цифровую схему 60, ручка, регулирующая коэффициент усиления через усилитель в аналоговой электрической схеме, или клапаном, регулирующим расход в пневматической или гидравлической логической схеме (ни одна из этих возможностей не показана на чертежах).
На фиг.10 показано, что для реализации второго рабочего режима логическая схема 26 также выполнена с обеспечением возможности автоматического приведения в действие каждого регулятора 22 таким образом, что поток текучей среды через выпускное отверстие 20 соответствующей линии подачи активизируется и поддерживается в течение конкретного периода («цикла смачивания»), причем этот поток через выпускное отверстие 20 попеременно прерывается на заданный промежуток времени («цикл прерывания»). Более конкретно, логическая схема 26 приводит в действие регуляторы 22, обеспечивая сначала активизацию или инициирование потока FA через выпускное отверстие линии подачи либо за счет запуска насоса в работу, либо за счет регулирования клапана 44, а затем поддерживает поток FA через выпускное отверстие, продолжая его на протяжении цикла смачивания, останавливает или прерывает поток FA через выпускное отверстие на протяжении цикла прерывания, а затем снова инициирует поток FA через выпускное отверстие линии подачи. Кроме того, логическая схема 26 также предпочтительно выполнена с обеспечением возможности приведения в действие регуляторов 22 таким образом, что смачивающая система 12 непрерывно работает в цикле смачивания и - попеременно - в цикле прерывания столько времени, сколько уплотняющее транспортное средство 1 движется во время операции уплотнения или «укатки», подробнее рассматриваемой ниже. Иными словами, во время нормальной работы катка за каждым циклом увлажнения следует цикл прерывания, и наоборот. Логическая схема 26 предпочтительно включает в себя (не показанную) схему или часть схемы таймера (т.е. часы), выполненную с обеспечением возможности выдачи показаний времени tM, в другие части логической схемы 26 для гарантии того, что логическая схема 26 сможет измерить или определить длительность TI цикла прерывания и/или период TW времени цикла смачивания (например, в альтернативной конфигурации, рассматриваемой ниже).
В предпочтительном варианте, для определения или измерения длительности цикла смачивания логическая схема 26 оперативно контролирует вращательное перемещение dR вальцов 2А, 2В посредством сигналов, принимаемых из датчика 24 скорости (или датчика 25 перемещения), а затем приводит в действие регуляторы 22 для прерывания потока FA через выпускное отверстие, когда вальцы 2А, 2В совершат суммарное желаемое перемещение DD (например, когда вальцы сделают один оборот), как показано на фиг.10. В альтернативном варианте, логическая схема 26 может быть выполнена с обеспечением возможности протекания потока FA текучей среды через выпускное отверстие 20 линии подачи в течение заданного периода времени, TW и последующего прерывания потока FA текучей среды после истечения этого периода TW времени (не показано). В соответствии с изображением, приведенным на фиг.10, поток FA через выпускное отверстие остается прерванным, т.е. расход RA через выпускное отверстие остается равным нулю, до тех пор, пока логическая схема 26 не определит, что заданный интервал TI времени истек, после чего логическая схема 26 приводит в действие регуляторы 22 таким образом, что поток течет через выпускное отверстие 20 с поддержанием желаемого расхода RA. В альтернативном варианте, логическая схема 26 может быть выполнена с обеспечением возможности измерения длительности цикла прерывания путем оперативного контроля вращательного перемещения dR вальцов 2А, 2В и путем предотвращения потока FA через выпускные отверстия 20 линий подачи на заданное количество полных или долей оборотов вальцов (не показано).
Кроме того, логическая схема 26 предпочтительно выполнена также с возможностью изменения или регулирования каждого из таких параметров, как расход RA через выпускное отверстие, длительность цикла смачивания (выражаемая заданным значением вращательного смещения DD и/или заданным периодом TI времени) и/или длительность TI цикла прерывания, с достижением совокупности разных значений. Более конкретно, система 10 управления дополнительно содержит одно или более других регулировочных устройств 63 (два из которых показаны на чертеже), оперативно соединенных с логической схемой 26 и конфигурированных с обеспечением возможности избирательного регулирования логической схемы 26 для избирательного изменения значений одного или более таких параметров, как применяемый расход RA, значение DD вращательного перемещения в цикле смачивания, период TW времени цикла смачивания или период TI времени прерывания, с достижением совокупности разных значений. В альтернативном варианте, регулировочное устройство 59 может быть выполнено также с обеспечением возможности регулирования логической схемы 26 для избирательного изменения одного из или всех рабочих параметров RA, DD, TW и TI с достижением совокупности разных значений.
На фиг.2 показано, что если предпочтительный регулятор 22 выполнен в виде шунтирующего устройства 42 для текучей среды, то логическая схема 26 выполнена с обеспечением возможности регулирования клапана 44 для достижения конкретной конфигурации или положения во время цикла смачивания, так что желаемая часть или весь объем потока FP текучей среды из выпускного отверстия 36 насоса направляется в первое выпускное отверстие 47, а после этого - через выпускное отверстие 20 линии подачи. Когда цикл смачивания завершается, логическая схема 26 после этого заставляет клапан 44 переходить во второе предельное положение, в котором весь поток FP из выпускного отверстия 36 насоса протекает через второе выпускное отверстие 48 в шунтирующую линию 43, а через выпускное отверстие 20 никакой поток не проходит, так что текучая среда непрерывно рециркулируется через насос 30 во время цикла прерывания. При наличии альтернативного регулятора 50 насоса, показанного на фиг.3, логическая схема 26 выполнена с обеспечением возможности приведения в действие регулятора 50 насоса во время цикла смачивания таким образом, что насос 30 создает поток FP текучей среды, проходящий из выпускного отверстия 36 насоса, а значит - и через выпускное отверстие 20 линии подачи, с желаемым расходом RA. В наиболее предпочтительном варианте, устройство 52 широтно-импульсной модуляции прикладывает подходящий ток к двигателю 40 насоса, чтобы заставить насос 30 обеспечивать желаемый расход RA. Когда цикл смачивания завершается, логическая схема 26 после этого заставляет регулятор 50 насоса останавливать работу насоса, предпочтительно - заставляя устройство 52 широтно-импульсной модуляции уменьшать примерно до нуля ток, прикладываемый к двигателю 40 насоса, до тех пор, пока не истечет предварительно определенный период времени прерывания.
На фиг.8 и 9 показано, что в обоих рабочих режимах логическая схема 26 также предпочтительно выполнена с обеспечением возможности приведения в действие регуляторов 22 таким образом, что эти регуляторы 22, по существу, останавливают или прерывают поток FA текучей среды через выпускное отверстие 20 линии, когда измеренная скорость S транспортного средства остается на уровне примерно нулевого значения, по меньшей мере, на протяжении предварительно заданного периода TS времени. Иными словами, когда логическая схема 26 определяет, что транспортное средство 1 оставалось стоящим или остановленным на протяжении предварительно заданного периода TS времени, а смачивающая система 12 работает в режиме непрерывного потока, логическая схема 26 заставляет регуляторы 22 прерывать или останавливать поток FA через выпускное отверстие 20 до тех пор, пока транспортное средство не начнет двигаться снова. Когда регуляторы 22 выполнены в виде шунтирующих устройств 42, логическая схема 26 выполнена с обеспечением возможности приведения в действие клапанов 44 таким образом, что, по существу, весь поток из выпускного отверстия 36 насоса рециркулируется во впускное отверстие 34 насоса. Кроме того, когда регуляторы 22 выполнены в виде регуляторов 50 насосов, логическая схема 26 выполнена с обеспечением возможности останова работы насосов 30, предпочтительно - путем уменьшения напряжения или тока, прикладываемого к двигателю 40, примерно до нуля вольт или ампер, соответственно.
Кроме того, логическая схема 26 предпочтительно также конфигурирована с обеспечением возможности приведения в действие регулятора 22 с тем, чтобы допустить или инициировать протекание текучей среды через выпускное отверстие 20 линии, когда измеренная скорость транспортного средства изменяется от примерно нулевого значения (например, от 0 об/мин вальца или 0 миль/час) до некоторого значения больше нуля, иными словами, соответствующего моменту, когда транспортное средство 1 начинает движение из неподвижного положения или завершает остановку. Логическая схема 26 предпочтительно выполнена с обеспечением возможности проведения операции «предварительного смачивания», позволяющей нанести исходное покрытие текущей среды на вальцы 2А, 2В, когда транспортное средство 1 стартует впервые или начинает двигаться снова после предварительно заданного периода простоя (например, превышающего пять минут). Логическая схема 26 предпочтительно приводит в действие четыре насоса 30, 30', как основных контуров 13А, 13В, так и вспомогательных контуров 15А, 15В, таким образом, что смачивающая текучая среда протекает через четыре выпускных отверстия 20, 20' при максимальном расходе в течение предварительно заданного периода времени (составляющего, например, пять секунд). После завершения операции предварительного смачивания, логическая схема 26 либо автоматически приводит в действие основные контуры 13А, 13В в любом из двух режимов - непрерывного потока или прерывистого потока, либо обеспечивает работу насосов 30 в ручном режиме, если таковой выбран.
При наличии регулятора 50 насоса, логическая схема 26 всегда инициирует поток текучей среды, запуская в работу насос 30. Однако при наличии гидравлического шунтирующего устройства 42 логическая схема 26 либо включает насос 30, когда транспортное средство 1 и система 10 управления запускаются в первый раз, либо - когда транспортное средство 1 лишь временно остановлено во время работы, - логическая схема 26 выдает в клапан 44 команду перейти из второго предельного положения (т.е. из положения, в котором поток полностью рециркулируется через насос 30) в другое положение клапана. Хотя этот вариант и не является предпочтительным, в альтернативном варианте можно выполнять систему 10 управления таким образом, что «запуск» или «останов» потока текучей среды можно будет осуществлять вручную, т.е. не так, как делалось автоматически с помощью логической схемы 26. Например, система 10 управления может быть снабжена одним или более выключателями, управляющими работой регулятора, например такими, как выключатель (не показан), управляющий электропитанием, подаваемым в насос 30.
На фиг.2 и 3 показано также, что логическая схема 26 предпочтительно изготовлена или выполнена в виде электрической логической схемы 60, электрически соединенной с датчиком 24 скорости и с регуляторами 22. В наиболее предпочтительном варианте, электрическая логическая схема 60 представляет собой микропроцессор 62, имеющий, по меньшей мере, один, а в предпочтительном варианте - три канала 64 ввода, причем каждый из двух каналов 64 электрически соединен с отдельным одним из датчиков 24 скорости, а один канал соединен с регулировочным устройством 61, и, по меньшей мере, два канала 66 вывода, каждый из которых электрически соединен с отдельным одним из двух регуляторов 22. Кроме того, микропроцессор 62 включает в себя программируемую запоминающую схему (не показана), выполненную с обеспечением возможности анализа входных сигналов из датчиков 24 скорости и генерирования и передачи управляющих сигналов в регуляторы 22, что рассматривается ниже. Помимо этого, запоминающая схема микропроцессора 62 выполнена или запрограммирована с обеспечением возможности избирательного приведения в действие регуляторов 22 в режиме непрерывного потока и - попеременно - в режиме прерывистого потока, как пояснялось выше.
В режиме непрерывного потока микропроцессор 62 генерирует управляющие сигналы, которые заставляют регуляторы 22 регулировать расход RA через выпускное отверстие 20 линии подачи в соответствии с измеренной скоростью S транспортного средства. Более конкретно, когда каждый из регуляторов 22 представлен в виде шунтирующего устройства 42 для текучей среды, микропроцессор 62 запрограммирован на генерирование управляющих сигналов, которые заставляют соленоид 51 приводить в действие каждый клапан 44, обеспечивая положение или конфигурацию клапана, приводящее или приводящую к такому расходу RA через выпускное отверстие 20 линии подачи, который пропорционален измеренной скорости S транспортного средства. В альтернативном варианте, когда регуляторы 22 представлены в виде являющихся устройствами широтно-импульсной модуляции исполнительных механизмов 52 двигателей, микропроцессор 62 запрограммирован на генерирование и передачу управляющих сигналов в являющиеся устройствами широтно-импульсной модуляции регуляторы 52 тока для изменяемого регулирования скорости двигателя насоса таким образом, что получаемый выходной поток FP насоса, а значит - и поток FA из выходного отверстия линии подачи, оказывается пропорциональным скорости S транспортного средства.
Кроме того, микропроцессор 62 предпочтительно встроен в контроллер 70, включающий в себя кожух 72, содержащий микропроцессор 62 и пульт 64 операторского интерфейса, установленный в кожух 72. Пульт 64 операторского интерфейса включает в себя совокупность устройств ввода оператором (например, кнопок или панелей), включающую в себя, по меньшей мере, одно устройство 27 выбора и регулировочное устройство 61, а также другое регулировочное устройство (другие регулировочные устройства) 63, рассмотренное (рассмотренные) выше, и одно или более отображающих устройств (например, индикаторных лампочек или экранов) (ни одно из которых не показано). В наиболее предпочтительном варианте, контроллер 70 представляет собой изделие в виде версии 0.2 модели LAPD MC400, поставляемое фирмой Sauer Danfoss, Inc., Миннеаполис, штат Миннесота, США. Предпочтительный контроллер фирмы Sauer Danfoss также выполнен с обеспечением возможности одновременного управления несколькими системами уплотняющего транспортного средства 1, такими как вибраторные механизмы и различные датчики, описание которых выходит за рамки настоящего изобретения.
Хотя микропроцессор 62 является предпочтительным в настоящее время, выполнение логической схемы 26 любым другим подходящим желаемым образом тоже находится в рамках притязаний настоящего изобретения. Например, логическая схема 26 может быть представлена в виде цифровой схемы другого типа, например, в виде промышленно поставляемого персонального компьютера или системы программируемого логического управления (ПЛУ), или может быть представлена в виде «зашитой» аналоговой электрической схемы. Кроме того, логическая схема 26 может быть представлена в виде гидравлической, пневматической или другого типа неэлектрической логической схемы (ни одна из которых не показана) постольку, поскольку конкретный тип используемой логической схемы 26 оказывается совместимым с конкретным датчиком (конкретными датчиками) 24 скорости и регулятором (регуляторами) 22, используемыми в системе 10 управления. Настоящее изобретение охватывает эти и другие альтернативные конструкции логической схемы 26, которые гарантируют функционирование системы 10 управления, в основном такое, как описанное выше.
Изучив описание конструкции и функционирования компонентов различных систем, из вышеизложенного описания и, в частности, из описания логической схемы 26, можно легко понять принцип эксплуатации системы 10 управления согласно настоящему изобретению. В основном, систему 10 управления просто активизируют или «включают», подавая электропитание в предпочтительный контроллер 70 или в другую форму логической схемы 26 и - если это необходимо - в другие элементы смачивающей системы 12, такие как насосы 30, соленоиды 51 клапанов или являющиеся устройствами широтно-импульсной модуляции исполнительные механизмы 52 двигателей, и т.д. После этого, в зависимости от рабочего режима, выбранного оператором транспортного средства, предпочтительно - с использованием устройства 76 ввода контроллера 70, система 10 управления гарантирует что на вальцы 2А, 2В во время работы катка будет подаваться либо непрерывный пропорциональный поток текучей среды, либо прерывистый поток текучей среды. Когда уплотняющее транспортное средство 1 оказывается временно стоящим или остановленным, логическая схема 26 прекращает подвод потока текучей среды к вальцам 2А, 2В, а затем снова устанавливает такой поток, когда транспортное средство 1 возобновляет операции уплотнения.
Система 10 управления согласно настоящему изобретению обладает рядом преимуществ над ранее созданными системами управления применительно к созданию смачивающих систем 12 транспортных средств. Поддерживая расход RA через выпускные отверстия 20 линий подачи текучей среды пропорциональным скорости S транспортного средства, обеспечивают смачивание или покрытие вальцов 2А, 2В объемом текучей среды, достаточным для предотвращения прилипания материала (дорожного покрытия) и одновременного предотвращения стекания смачивающей текучей среды. При этом удается, по существу, избежать, как таковых, негативных воздействий прилипания материала и преждевременного охлаждения покрытия, указанных выше. Кроме того, при работе либо в режиме непрерывного потока, либо в режиме прерывистого потока предлагаемая система 10 управления обеспечивает преимущество подачи лишь того общего количества текучей среды, которое необходимо для поддержания вальцов 2А, 2В надлежащим образом смоченными или покрытыми, тем самым позволяя экономить смачивающую текучую среду, содержащуюся внутри источников 14 текучей среды. Как таковая, система 10 управления увеличивает производительность уплотняющего транспортного средства 1, уменьшая частоту остановок работы или «время простоя» в соответствии с потребностями в пополнении бортовых источников 14 текучей среды.
Специалисты в данной области техники поймут, что в вышеописанные варианты осуществления можно внести изменения, находящиеся в рамках изобретательского замысла, толкуемого в широком смысле. Поэтому ясно, что это изобретение не сводится к приведенным конкретным вариантам осуществления, а должно считаться охватывающим модификации, проводимые в рамках существа и объема притязаний настоящего изобретения, определяемых прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2532039C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСМИССИИ С ДВОЙНЫМ СЦЕПЛЕНИЕМ (ВАРИАНТЫ) | 2011 |
|
RU2458270C1 |
| ДВУХТОПЛИВНАЯ СИСТЕМА ПОДАЧИ ДЛЯ ПРЯМОГО ВПРЫСКА | 2019 |
|
RU2779145C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВА МОЛОЧНОГО ПРОДУКТА | 1999 |
|
RU2240591C2 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ ДОСТАВКИ СИЛЬНО РАСПЫЛЕННОЙ ЖИДКОСТИ ДЛЯ ДИЗЕЛЬНОГО ВЫХЛОПА В СИСТЕМУ ПРЕДВАРИТЕЛЬНОЙ ОЧИСТКИ ВЫХЛОПНЫХ ГАЗОВ | 2011 |
|
RU2575731C2 |
| ТЯГОВЫЙ МОДУЛЬ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА С УСТРОЙСТВОМ ОХЛАЖДЕНИЯ, СПОСОБ РАБОТЫ ТАКОГО МОДУЛЯ И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2725018C2 |
| РЕГУЛЯТОР МАССОВОГО РАСХОДА, ДЕЙСТВУЮЩИЙ ПО ПРИНЦИПУ КОРИОЛИСА, ВЫПОЛНЕННЫЙ ИЗ ХИМИЧЕСКИ ИНЕРТНОГО МАТЕРИАЛА (ВАРИАНТЫ) | 2002 |
|
RU2303808C2 |
| СИСТЕМА ДИАФРАГМЕННОГО НАСОСА С ВОЗМОЖНОСТЬЮ ПОВТОРНОЙ ЗАЛИВКИ | 2014 |
|
RU2641414C2 |
| ПЕРЕКИДНОЙ ПРОДУВОЧНЫЙ КЛАПАН | 2006 |
|
RU2403482C2 |
| СЕПАРАТОРНАЯ СИСТЕМА | 2012 |
|
RU2595662C2 |
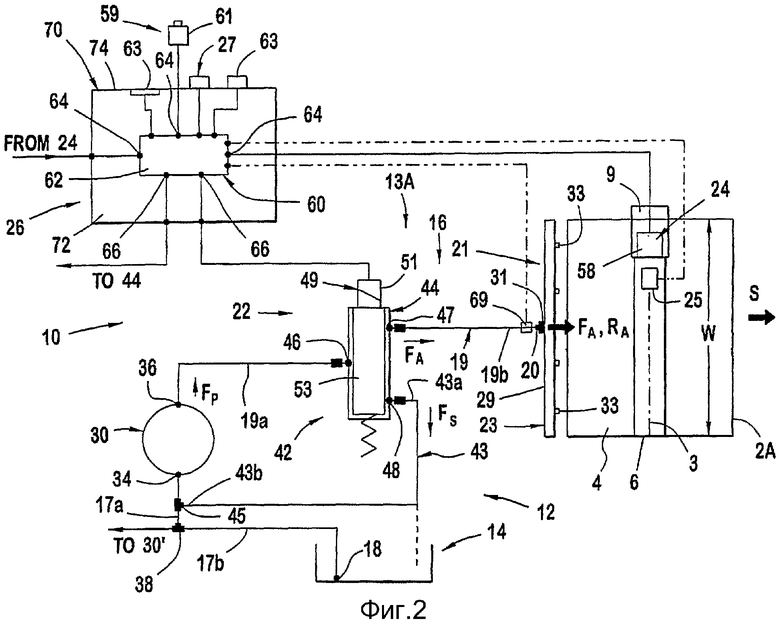



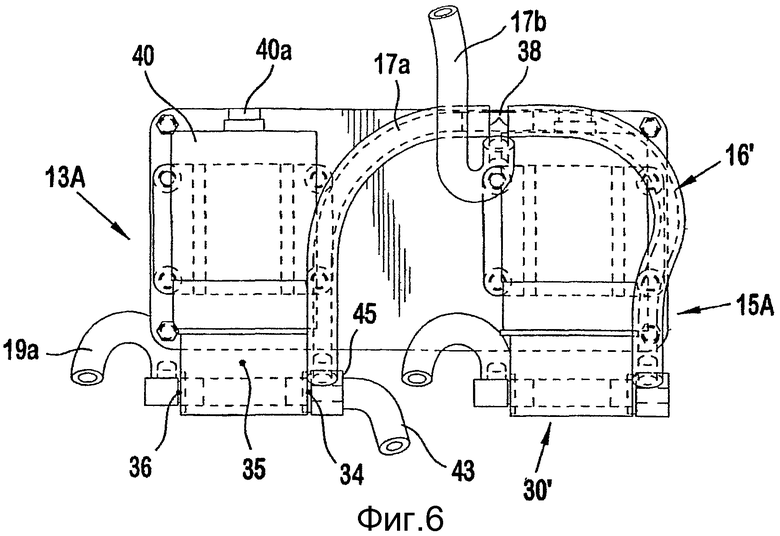



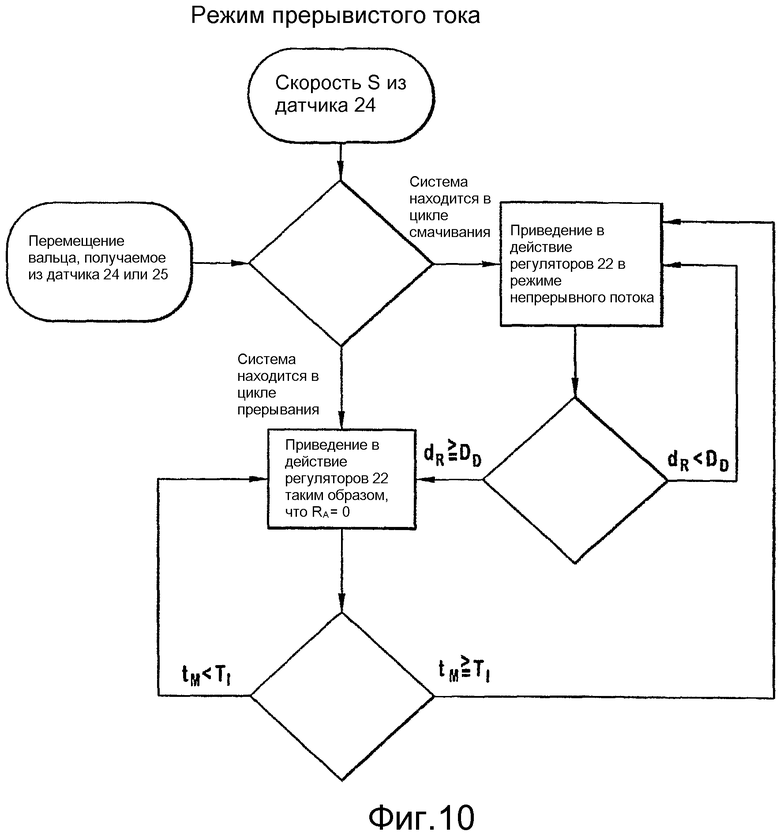
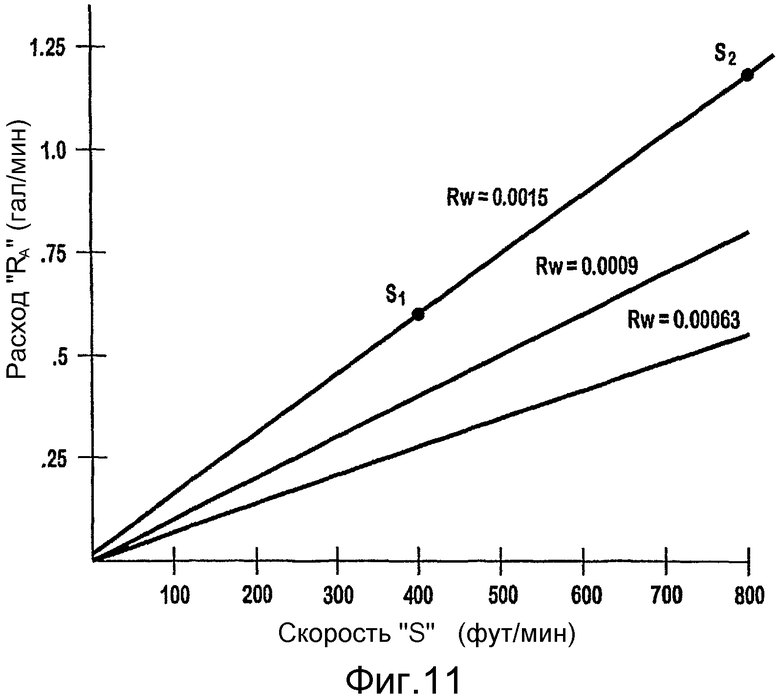
Предложен контроллер для смачивающей системы транспортного средства, включающей в себя источник текучей среды и линию подачи текучей среды, имеющую впускное отверстие, сообщающееся с источником, и выпускное отверстие, расположенное с возможностью направления текучей среды на уплотняющий валец. Контроллер включает в себя регулятор, выполненный с возможностью регулирования расхода текучей среды через выпускное отверстие. Датчик скорости, соединенный с транспортным средством, измеряет скорость транспортного средства. Кроме того, логическая схема, соединенная с датчиком скорости и с регулятором, автоматически приводит в действие регулятор таким образом, что регулятор регулирует расход, делая его в основном пропорциональным скорости транспортного средства. В альтернативном варианте, логическая схема допускает поток через выпускное отверстие на протяжении предварительно заданного перемещения вальца и попеременно прерывает поток на протяжении предварительно заданного периода времени. Регулятор представляет собой либо шунтирующую линию и клапан, регулирующий поток через шунтирующую линию для регулирования потока через упомянутое выпускное отверстие, либо регулятор насоса, управляющий потоком из насоса в линии подачи. 3 н. и 19 з.п. ф-лы, 11 ил.
| DE 1175260 В, 03.08.1964 | |||
| US 3782634 А, 01.01.1974 | |||
| Бесконтактный переключатель | 1979 |
|
SU864369A1 |
| Устройство для дистанционного измерения и регистрации веса гололедных отложений | 1956 |
|
SU109303A1 |
| Смачивающее устройство к дорожному вальцовому катку | 1977 |
|
SU717210A1 |

