Предлагаемое изобретение относится к области металлургии и может быть использовано при неразрушающем контроле проката для выявления внутренних дефектов проката, в частности труб, в т.ч. сварных.
Известен электромагнитно-акустический преобразователь (ЭМАП), который снабжен двумя концентраторами, один из которых установлен неподвижно на корпусе ЭМАП между постоянными магнитами, другой, прилегающий к нему вплотную, установлен на подложке, а магнитная система заключена во внутренний корпус, снабженный приводом, например пневмоцилиндром, с возможностью вертикальных перемещений относительно концентраторов, корпуса ЭМАП и подложки [1].
Известен электромагнитно-акустический преобразователь (ЭМАП), в котором постоянные магниты смонтированы в обойме из магнитного материала, вставленной в цилиндрический барабан из немагнитного материала, установленного в корпусе преобразователя с возможностью вращения вокруг своей оси и соединенного при помощи ползуна со штоком пневмоцилиндра, закрепленного на корпусе, а подложка с концентратором выполнены по окружности с общим радиусом, совпадающим с радиусом барабана [2].
Известен измерительный модуль, содержащий электромагнитно-акустический преобразователь (ЭМАП), содержащий механизм перемещения электромагнитно-акустического преобразователя, обеспечивающий его постоянное поджатие только за счет магнитного притяжения и независящий от механизма перемещения подложки, жестко связанной с модулем, выполненный в виде рамки, а на подложке установлена гильза с регулировочным винтом, в которую вставлен электромагнитно-акустический преобразователь [3].
Известно устройство для ультразвукового контроля круглого проката, в котором система регулирования содержит две рычажных системы, одна из которых выполнена в виде плоской рычажной системы и двух рычагов с отбойниками, которые попарно связаны между собой пружинами, а другая рычажная система выполнена в виде двух пар параллельных рычагов и снабжена приводом, например пневмоцилиндром, корпус электромагнитно-акустического преобразователя установлен с возможностью перемещения на определенную величину и фиксирования на определенном расстоянии от объекта контроля [4].
Известно устройство для ультразвукового контроля круглого проката, в котором система регулирования состоит из механизма подвода и прижима подложки к объекту контроля и механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля. Механизм подвода и прижима подложки к объекту контроля содержит корпус, на котором смонтированы направляющие, траверсу с пневмоцилиндром и цапфами для соединения с механизмом центрирования и независимого прижима ультразвукового преобразователя к объекту контроля. Механизм центрирования и независимого прижима ультразвукового преобразователя к объекту контроля содержит подложку, которая жестко связана с механизмом подвода и прижима подложки к объекту контроля при помощи рамки. На подложке установлении планка с ультразвуковым преобразователем, на которой смонтированы опоры скольжения, например линейные подшипники, корпуса которых жестко соединены с подложкой, а планка прижата к подложке только силой пружин или силой магнитного поля в случае использования электромагнитно-акустического преобразователя [5]. Данное устройство принято нами за прототип.
Общим недостатком известных устройств является высокая сложность конструкций, а также невозможность обеспечения надежной защиты подложки с катушками индуктивности от повреждений из-за недостаточно упругой подвески подложки относительно магнитной системы электромагнитно-акустического преобразователя.
Целью изобретения является упрощение конструкции электромагнитно-акустического преобразователя и повышение защищенности ЭМАП от возможных повреждений при скольжении подложки по поверхности объекта контроля.
Указанная задача решается тем, что в подвеске электромагнитно-акустического преобразователя, содержащей опоры, систему подачи сжатого воздуха, подложку с катушками индуктивности, источник магнитного поля, например постоянный магнит, систему регулирования и настройки положения электромагнитно-акустического преобразователя относительно объекта контроля, система регулирования и настройки выполнена в виде плиты, на которой установлен стержень, жестко соединенный с корпусом из немагнитного материала, в котором смонтирован постоянный магнит, стержень снабжен зажимом и страхующей гайкой, что обеспечивает его перемещение вдоль вертикальной оси плиты и фиксацию стержня с корпусом и магнитом при настройке подвески электромагнитно-акустического преобразователя относительно поверхности объекта контроля, например трубы определенного диаметра, подложка снабжена упругой подвеской, выполненной в виде планки, жестко закрепленной на подложке, планка соединена с корпусом при помощи вертикальных осей, линейных подшипников и стаканов с пружинами с возможностью возвратно-поступательного движения совместно с подложкой относительно корпуса и магнита, что позволяет при фиксированном жестком положении корпуса и магнита относительно объекта контроля упруго прижимать подложку с катушками индуктивности к поверхности объекта контроля с малым усилием, регулируемым при помощи пружин и настроечных винтов, опоры выполнены в виде оснований, в которых смонтированы конические втулки, внутри которых установлены с зазором относительно внутренних поверхностей втулок керамические шары, в основаниях опор для создания воздушной подушки выполнены каналы для подачи сжатого воздуха в зазор между поверхностями керамических шаров и конических втулок, опоры снабжены сальниками и гайками для поджима сальников к поверхности шаров.
Описание конструкции подвески
Фиг.1 - продольный разрез Б-Б подвески.
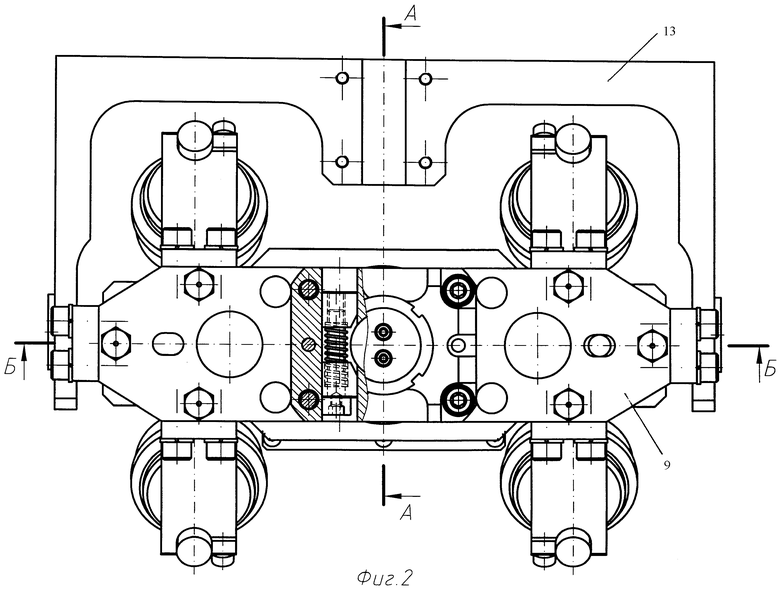
Фиг.2 - вид сверху.
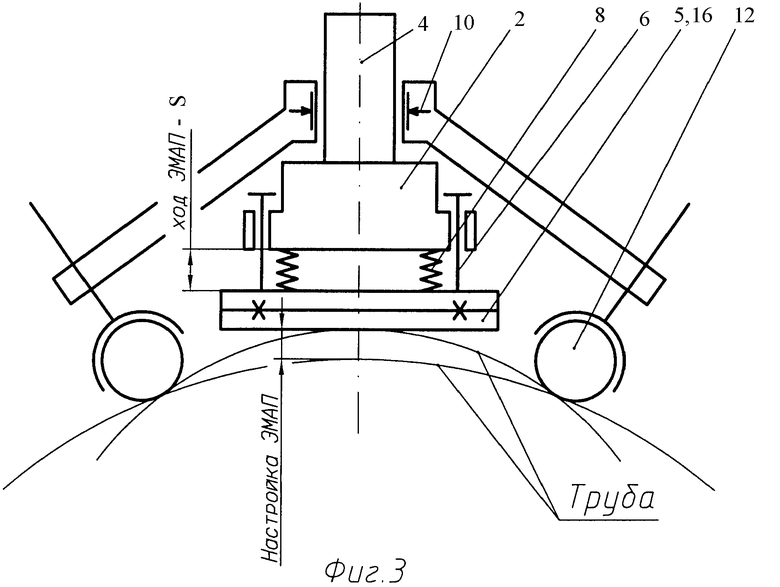
Фиг.3 - принципиальная схема подвески.
Фиг.4 - поперечный разрез А-А по стержню с магнитом и линейным подшипникам.
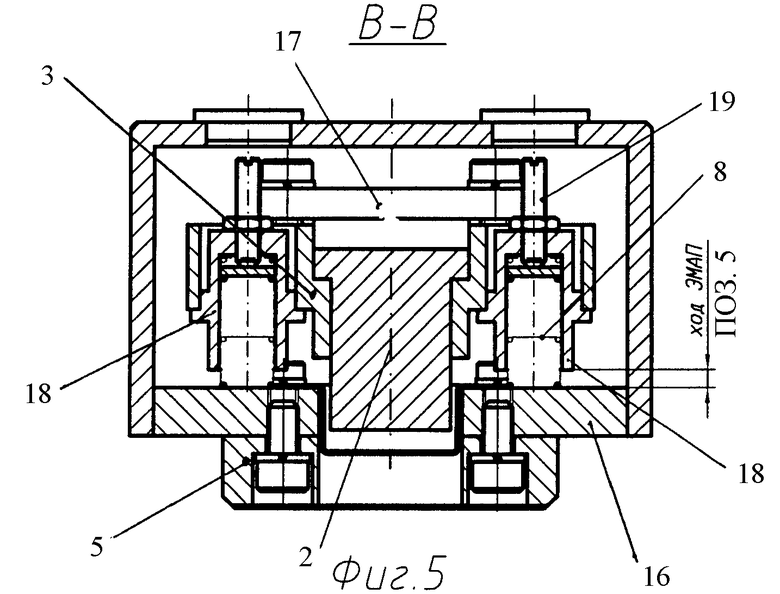
Фиг.5 - сечение В-В по упругой подвеске.
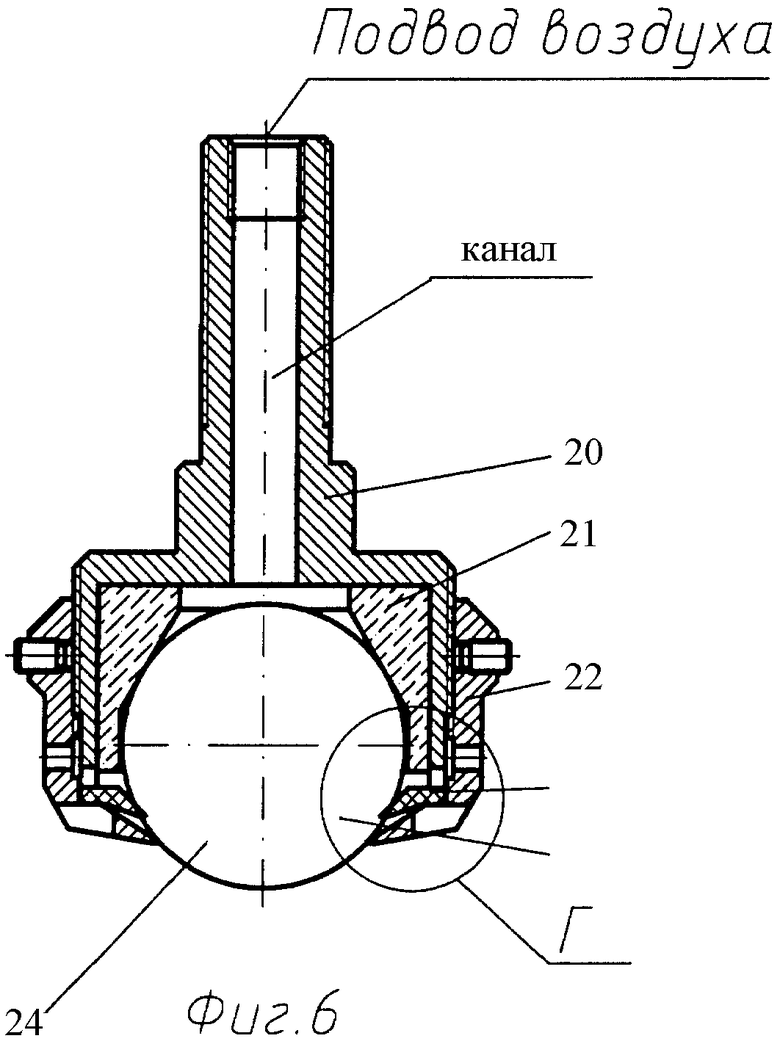
Фиг.6 - вертикальный разрез по шаровой опоре.
Фиг.7 - вид Г на керамический шар, гайку и сальник.
Подвеска 1, оборудованная системой регулирования и настройки электромагнитно-акустического преобразователя (ЭМАП), содержит источник магнитного поля, например постоянный магнит 2, установленный в металлический немагнитный корпус 3 и закрепленный на стержне 4, подложку 5 с катушками индуктивности (условно не показаны). В состав ЭМАП входит подложка 5 с катушками индуктивности и магнит 2. Подложка 5 относительно магнита 2 установлена с возможностью возвратно-поступательного движения на вертикальных осях 6 в линейных подшипниках 7. Подложка 5 установлена с возможностью отталкивания от магнита 2 при помощи пружин 8. Стержень 4 смонтирован на плите 9 и жестко соединен с корпусом 3, в котором смонтирован постоянный магнит 2. Для вертикальных перемещений стержня 4 с магнитом 2 при установке подвески на объект контроля предусмотрен зажим 10 для фиксации стержня 4 в определенном положении и страхующая гайка 11. К плите 9 прикреплены шаровые опоры 12. Плита 9 закреплена на вилке 13 посредством осей 14. Для предотвращения вращения подложки 5 относительно магнита 2 при настройке ЭМАП предусмотрен палец 15, закрепленный на магните 2. Для прижима к объекту контроля, например к трубе, независимо от магнита 2, подложка 5 снабжена упругой подвеской, выполненной в виде планки 16, в которой закреплены вертикальные оси 6 и линейные подшипники 7, соединенные упором 17.
Для регулировки хода «S» подложки и обеспечения малого усилия прижима подложки к объекту контроля пружины 8 вставлены в стаканы 18, смонтированные в корпусе 3, и снабжены регулировочными винтами 19. Шаровая опора состоит из основания 20, конической втулки 21, гайки 22, сальника 23 и керамического шара 24, вставленного в коническую втулку 21. В основании 20 выполнен канал, через который под конический шар 24 подается сжатый воздух за счет зазора b. Для защиты от пыли и грязи подложки 5 предусмотрен кожух 25, прикрепленный к планке 16.
Описание настройки
1. Вылет шаровых опор 12 настраивается на одинаковое расстояние. Конструкция подвески 1 устанавливается на объект контроля (ОК).
2. Магнит 2 перемещается к ОК вместе со стержнем 4 относительно плиты 9, а следовательно, и относительно шаровых опор 12.
3. Подложка 5 с катушками индуктивности подводится к ОК и выбирается половина свободного хода S пружин 8 (фиг.3).
4. Стержень 4 фиксируется зажимом 10 и страхуется гайкой 11.
5. Палец 15 не дает подложке 5 вращаться относительно магнита 2 во время настроек.
6. Для перенастройки на другой диаметр трубы (ОК) достаточно отпустить зажим 10 и гайкой 11 настроить подложку 5 на текущий диаметр трубы.
Описание работы
1. Объект (труба) вращается. Подвеска 1 на шаровых опорах 12 перемещается по поверхности трубы вдоль ее оси. Платформа, на которой находится подвеска, условно не показана.
2. Подложка 5 прижимается к трубе только пружинами 8 и обеспечивает постоянный акустический контакт, несмотря на неровности или овальность трубы.
3. Подложка 5, являясь магнитно-нейтральным элементом, не взаимодействует с магнитным полем магнита 2. Таким образом минимизируется износ подложки и увеличивается ее ресурс.
4. К шаровым опорам 12 подводится сжатый воздух для создания воздушной подушки с целью уменьшения трения и охлаждения пары трения: поверхность трубы - керамические шары 24.
Предлагаемая конструкция подвески ЭМАП значительно проще известных конструкций ЭМАП и обеспечивает, как показали испытания, надежную защиту подложки от механических повреждений.
Источники информации
1. Патент РФ №2295125.
2. Патент РФ №2300763.
3. Патент РФ №2315294.
4. Патент РФ №2325636.
5. Патент РФ №2313785.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КРУГЛОГО ПРОКАТА | 2006 |
|
RU2325636C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2447430C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2243550C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КРУГЛОГО ПРОКАТА | 2006 |
|
RU2313785C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2271876C1 |
| УСТРОЙСТВО ДЛЯ СЛЕЖЕНИЯ ЗА СВАРНЫМ ШВОМ | 2007 |
|
RU2343469C2 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2247978C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2258218C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2006 |
|
RU2315294C1 |
| ПРОТЕКТОР ДЛЯ ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2010 |
|
RU2457479C1 |


Использование: для неразрушающего контроля проката. Сущность: заключается в том, что подвеска электромагнитно-акустического преобразователя содержит систему регулирования и настройки, выполненную в виде плиты, на которой установлен стержень, жестко соединенный с корпусом из немагнитного материала, в котором смонтирован постоянный магнит, стержень снабжен зажимом и страхующей гайкой, что обеспечивает его перемещение вдоль вертикальной оси плиты и фиксацию стержня с корпусом и магнитом при настройке подвески электромагнитно-акустического преобразователя относительно поверхности объекта контроля, например трубы определенного диаметра, подложка снабжена упругой подвеской, выполненной в виде планки, жестко закрепленной на подложке, планка соединена с корпусом при помощи вертикальных осей, линейных подшипников и стаканов с пружинами с возможностью возвратно-поступательного движения совместно с подложкой относительно корпуса и магнита, что позволяет при фиксированном жестком положении корпуса и магнита относительно объекта контроля упруго прижимать подложку с катушками индуктивности к поверхности объекта контроля с малым усилием, регулируемым при помощи пружин и настроечных винтов, опоры выполнены в виде оснований, в которых смонтированы конические втулки, внутри которых установлены с зазором относительно внутренних поверхностей втулок керамические шары, в основаниях опор для создания воздушной подушки выполнены каналы для подачи сжатого воздуха в зазор между поверхностями керамических шаров и конических втулок, опоры снабжены сальниками и гайками для поджима сальников к поверхности шаров. Технический результат: упрощение конструкции электромагнитно-акустического преобразователя и повышение его защищенности от возможных повреждений при скольжении подложки по поверхности объекта контроля. 7 ил.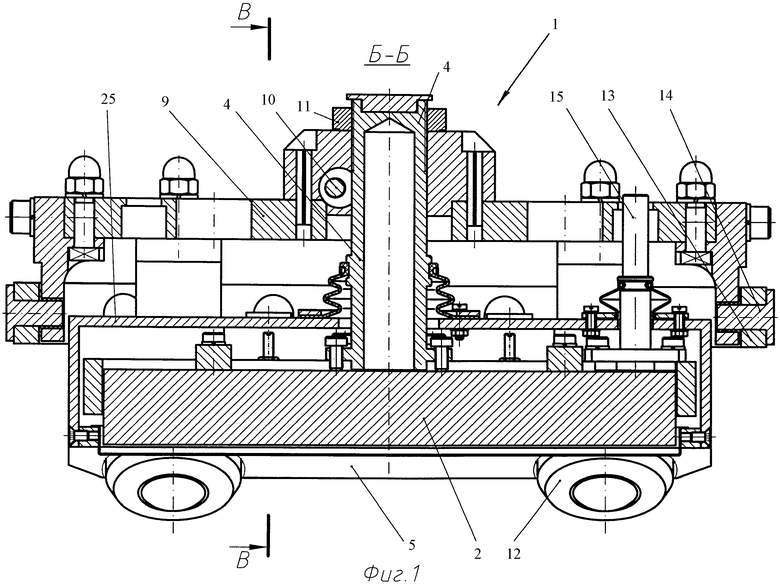
Подвеска электромагнитно-акустического преобразователя, содержащая опоры, систему подачи сжатого воздуха, подложку с катушками индуктивности, источник магнитного поля, например постоянный магнит, систему регулирования и настройки положения электромагнитно-акустического преобразователя относительно объекта контроля, отличающаяся тем, что система регулирования и настройки выполнена в виде плиты, на которой установлен стержень, жестко соединенный с корпусом из немагнитного материала, в котором смонтирован постоянный магнит, стержень снабжен зажимом и страхующей гайкой, что обеспечивает его перемещение вдоль вертикальной оси плиты и фиксацию стержня с корпусом и магнитом при настройке подвески электромагнитно-акустического преобразователя относительно поверхности объекта контроля, например трубы определенного диаметра, подложка снабжена упругой подвеской, выполненной в виде планки, жестко закрепленной на подложке, планка соединена с корпусом при помощи вертикальных осей, линейных подшипников и стаканов с пружинами с возможностью возвратно-поступательного движения совместно с подложкой относительно корпуса и магнита, что позволяет при фиксированном, жестком положении корпуса и магнита относительно объекта контроля, упруго прижимать подложку с катушками индуктивности к поверхности объекта контроля с малым усилием, регулируемым при помощи пружин и настроечных винтов, опоры выполнены в виде оснований, в которых смонтированы конические втулки, внутри которых установлены с зазором относительно внутренних поверхностей втулок керамические шары, в основаниях опор для создания воздушной подушки выполнены каналы для подачи сжатого воздуха в зазор между поверхностями керамических шаров и конических втулок, опоры снабжены сальниками и гайками для поджима сальников к поверхности шаров.
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КРУГЛОГО ПРОКАТА | 2006 |
|
RU2313785C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2300763C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2295125C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2223487C1 |
| Преобразователь электромагнитно-акустического дефектоскопа | 1989 |
|
SU1707525A1 |
| Преобразователь электромагнитно-акустического дефектоскопа | 1985 |
|
SU1455291A1 |
| US 5741973 A, 21.04.1998 | |||
| US 5619423 A, 08.04.1997. | |||

