Изобретение относится к способу обнаружения состояния схода с рельса колесной пары рельсового транспортного средства, причем ускорение колесной пары измеряют перпендикулярно плоскости рельса с помощью датчика ускорения.
Кроме того, изобретение относится к устройству для обнаружения состояния схода с рельса колеса рельсового транспортного средства, содержащему, по меньшей мере, один датчик ускорения для определения ускорения колеса перпендикулярно плоскости рельса, причем датчик ускорения соединен с блоком обработки для анализа сформированного датчиком ускорения сигнала ускорения.
Колесо или колесная пара рельсового транспортного средства может подвергаться, например, квазистатическим ускорениям, вызванным профилем местности, или же ускорениям, вызванным сходом с рельса. Интерес для обнаружения схода с рельса представляют, однако, только ускорения, вызванные движениями колесной пары перпендикулярно плоскости рельса. Ниже ускорения, действующие на колесные пары перпендикулярно плоскости рельсов, называются ускорениями падения. В этом смысле в данной заявке вытекающие из этих ускорений вертикальные скорости также называются скоростями падения.
Подобные ускорениям падения могут быть вызваны в случае схода с рельса ускорением свободного падения и разжимающейся первичной рессорой, причем конечная точка этого «движения падения» колеса или колесной пары задается обычно жестким железнодорожным полотном.
Датчики, которые могут измерять постоянную составляющую ускорения, достаточно чувствительны к механическим повреждениям для использования в рельсовых транспортных средствах. Нечувствительные к механическим повреждениям датчики не могут, однако, измерять постоянную составляющую, они имеют нижнюю предельную частоту. Медленные изменения ускорения определить таким образом нельзя. Кроме того, измерительные сигналы имеют обычно сдвиг, подверженный дрейфовым явлениям. При использовании нечувствительных к механическим повреждениям датчиков ускорения не квазистатические составляющие ускорения колесной пары, а, в первую очередь, дрейфовые явления и низкочастотные электромагнитные связи дают амплитудную характеристику сформированных сигналов ускорения.
Из DE 19953677 С1 известен способ описанного выше типа. В известном документе раскрыт способ обнаружения схода с рельсов рельсового транспортного средства. Для этого ускорение находящегося в прямом или косвенном контакте с колеей конструктивного элемента рельсового транспортного средства определяют вертикально и/или поперек направления движения. Сигнал ускорения дважды интегрируют по времени и этот дважды интегрированный сигнал ускорения сравнивают с верхним и/или нижним предельным значением, причем при значении выше или ниже предельного значения имеет место сход с рельсов.
Недостаток этой известной конструкции прежде всего в том, что за счет двукратного интегрирования возникает очень плохое отношение сигнал/шум. Так, однократное интегрирование может уменьшить отношение сигнал/шум на 20 дБ на декаду интегрируемого сигнала. За счет двукратного интегрирования отношение сигнал/шум уменьшается на 40 дБ на декаду. Таким образом, при двукратном интегрировании низкочастотный паразитный сигнал усиливается на коэффициент 10 (20 дБ) больше, чем собственно полезный сигнал - ускорение падения. За счет двукратного интегрирования к блоку обработки предъявляются высокие требования, что может привести к высоким производственным расходам. Кроме того, с известным способом или известной системой из-за необходимого трудоемкого блока обработки могут возникнуть задержки при обнаружении состояний схода.
Поэтому задачей изобретения является создание способа, который позволил бы просто, экономично, а также быстро и с высокой надежностью обнаружить сход с рельса колесной пары.
Эта задача согласно изобретению решается способом описанного выше типа за счет того, что по сформированному датчиком ускорения сигналу ускорения посредством однократного интегрирования задаваемой по временному интервалу величины вычисляют скорость падения колеса в направлении плоскости рельса и с помощью вычисленной скорости падения проверяют, имеет ли место состояние схода с рельса.
Преимущество изобретения заключается в существенном упрощении обнаружения состояния схода с рельса за счет определения мгновенной скорости падения посредством однократного интегрирования сигнала ускорения. Поскольку при однократном интегрировании отношение сигнал/шум существенно лучше, чем при многократном интегрировании, к блоку обработки предъявляются также более низкие требования. Таким образом, обеспечивается простая и экономичная конструкция блока управления. Кроме того, решение согласно изобретению обеспечивает простую реализацию исключительно аппаратными средствами, что дополнительно повышает надежность обнаружения схода с рельса.
В первом варианте осуществления изобретения значение скорости падения сравнивают с предельной скоростью падения, причем при превышении предельной скорости падения делают вывод о состоянии схода с рельса.
Согласно второму варианту осуществления изобретения по временной характеристике скорости падения делают вывод о состоянии схода с рельса.
В одном предпочтительном варианте осуществления изобретения сигнал ускорения формируют в зоне буксы.
Для улучшения обработки сигнала и повышения невосприимчивости способа к паразитным влияниям перед интегрированием устраняют низкочастотные содержащиеся в сигнале ускорения паразитные составляющие.
Благоприятным образом для устранения паразитных составляющих используют фильтрацию верхних частот.
Для того чтобы правильно отобразить характеристику движения падения за счет интегрирования, при фильтрации поддерживают постоянным групповое время прохождения отдельных частотных составляющих интегрируемого сигнала ускорения.
Предпочтительным образом интегрирование сигнала ускорения проводят соответственно в последовательные временные интервалы, причем конечная точка одного временного интервала образует начальную точку следующего временного интервала.
Однако интегрирование сигнала ускорения можно проводить также соответственно в последовательные временные интервалы, причем последовательные временные интервалы на отдельных участках перекрываются.
Для осуществления способа согласно изобретению подходит, в частности, устройство описанного выше типа, в котором блок обработки предназначен для вычисления скорости падения колеса в направлении плоскости рельса по сигналу ускорения за счет однократного интегрирования задаваемой по временному интервалу величины и проверки с помощью вычисленной скорости падения, имеет ли место состояние схода с рельса.
Предпочтительным образом блок обработки предназначен для сравнения вычисленной скорости падения с предельной скоростью падения, причем при превышении предельной скорости падения делают вывод о состоянии схода с рельса.
Далее блок обработки может быть предназначен для обнаружения с помощью временной характеристики скорости падения состояния схода с рельса.
В одном предпочтительном варианте осуществления изобретения датчик ускорения расположен в зоне буксы колеса рельсового транспортного средства.
Далее может быть предусмотрен фильтр для устранения перед интегрированием низкочастотных содержащихся в сигнале ускорения паразитных составляющих, причем фильтр предпочтительным образом представляет собой фильтр верхних частот.
Кроме того, фильтр оставляет, по существу, без влияния фазовые отношения частотных составляющих сигнала ускорения.
Другие преимущества достигаются за счет того, что блок обработки предназначен для осуществления интегрирования сигнала ускорения соответственно в последовательные временные интервалы, причем конечная точка одного временного интервала образует начальную точку следующего временного интервала.
В другом варианте осуществления изобретения блок обработки может быть предназначен также для осуществления интегрирования сигнала ускорения соответственно в последовательные временные интервалы, причем последовательные временные интервалы на отдельных участках перекрываются.
Предпочтительным образом в зоне каждого колеса рельсового транспортного средства расположен датчик ускорения.
Изобретение вместе с другими преимуществами более подробно поясняется ниже с помощью некоторых не ограничивающих его примеров осуществления, изображенных на чертежах, на которых схематично представлено:
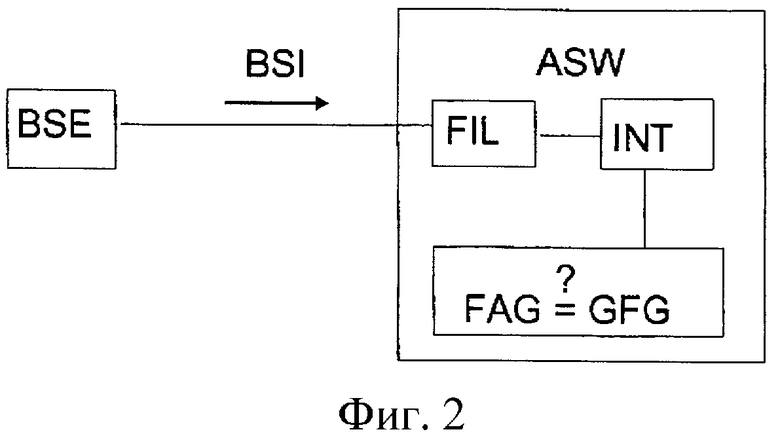
- фиг. 1: рельсовое транспортное средство с устройством для осуществления способа согласно изобретению;
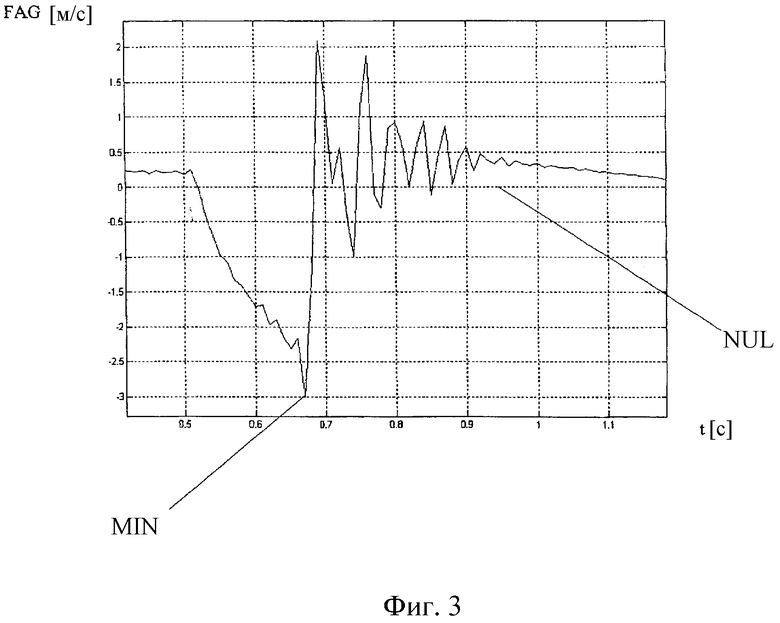
- фиг. 2: блок-схема устройства, согласно изобретению;
- фиг. 3: временная характеристика скорости падения рельсового транспортного средства во временном интервале при сходе с рельсов.
На фиг. 1 для осуществления способа согласно изобретению для обнаружения состояния схода с рельсов рельсового транспортного средства в зоне тележки DRE формируют сигнал ускорения. Для этого устройство согласно изобретению содержит датчик BSE ускорения, который может быть расположен на буксе AXL колеса RAD или колесной пары рельсового транспортного средства. Благоприятным образом в зоне каждого колеса RAD, например на каждой буксе AXL, расположен датчик BSE ускорения.
Существенным элементом настоящего изобретения является тот факт, что особенно надежные и представительные результаты измерений могут быть достигнуты, когда направление действия датчиков BSE ускорения по существу перпендикулярно направлению движения, т.е. перпендикулярно плоскости ε рельса. На чертеже направление движения рельсового транспортного средства обозначено стрелкой FAR, причем направление действия датчиков BSE ускорения перпендикулярно плоскости чертежа. Под направлением действия датчика BSE ускорения здесь следует понимать направление, в котором датчик может предпочтительно воспринимать силы ускорения и выпускать сигналы.
Датчики BSE ускорения могут быть выполнены, например, в виде пьезоэлектрических датчиков, у которых известным образом между двумя проходящими параллельно друг другу конденсаторными пластинами расположен пьезоэлектрический кристалл. Если используется этот вид датчиков, то за счет того, что обе конденсаторные пластины проходят по существу перпендикулярно направлению движения рельсового транспортного средства, можно добиться совпадения направления действия датчиков ускорения с направлением движения. Само собой, могут использоваться также и другие известные датчики ускорения, основанные на других механизмах. Подобные датчики известны специалисту в большом числе и поэтому здесь подробно не поясняются.
Сформированный датчиком BSE ускорения сигнал BSI ускорения передают согласно фиг. 2 на блок ASW обработки, причем передача сигнала BSI ускорения датчиками BSE ускорения на блок ASW обработки может происходить по электрическим проводам, стекловолоконным кабелям или беспроводным путем, например по радио или посредством беспроводной технологии Blue Tooth. Блок обработки может представлять собой соответственно запрограммированный микропроцессор или процессор обработки сигналов, однако в предпочтительном варианте осуществления изобретения для повышения надежности следует отдать предпочтение реализации блока ASW обработки чисто аппаратными средствами.
По сигналу ускорения в блоке ASW обработки посредством однократного интегрирования INT задаваемой по временному интервалу величины вычисляют скорость FAG падения колеса RAD или колесной пары в направлении плоскости ε рельса. При этом интегрирование сигнала BSI ускорения может происходить соответственно в следующие друг за другом временные интервалы или временные окна, причем конечная точка одного временного интервала может образовывать начальную точку следующего временного интервала. Далее возможно также, чтобы следующие друг за другом временные интервалы частично перекрывались. В принципе, между двумя следующими друг за другом временными интервалами может существовать также временной промежуток.
Интегрирование сигнала BSI ускорения может происходить цифровым или аналоговым путем. Схемы и способы цифрового или аналогового интегрирования сигнала по задаваемому временному диапазону известны специалисту в большом количестве и поэтому здесь подробно не поясняются.
После вычисления действительной скорости FAG падения колеса RAD или колесной пары в рассматриваемом временном интервале ее сравнивают с предельной скоростью GFG падения, причем при превышении этой предельной скорости падения делают вывод о состоянии схода с рельса. Поскольку вычисленная в рассматриваемом временном интервале скорость падения в случае схода с рельса принимает значения, которые в нормальном состоянии (например, при проезде стрелок) никогда не могут быть достигнуты - в нормальном режиме возникающие разности по высоте слишком малы для ускорения до высоких скоростей - сход с рельса можно констатировать с очень высокой вероятностью. Таким образом, значение интеграла сигнала ускорения в рассматриваемом временном интервале принимает в случае схода с рельса значения, которые в нормальном режиме никогда не могут быть достигнуты.
Во-первых, с помощью значения определенного интеграла сигнала ускорения, причем верхний и нижний пределы интеграла установлены соответственно рассматриваемым временным интервалам, можно сделать вывод о сходе с рельса. Во-вторых, также по характеристике скорости падения как функции времени в рассматриваемом временном интервале можно сделать вывод о сходе с рельса.
На фиг. 3 изменение временной характеристики скорости FAG падения в пределах интервала интегрирования, составляющем здесь около 1 секунды, может соответствовать в задаваемом значении сходу с рельса. Изображенная на фиг. 3 временная характеристика скорости FAG падения, как уже сказано, достигнута за счет однократного интегрирования сигнала BSI ускорения, причем направление действия соответствующего датчика BSE ускорения направлено от плоскости ε рельсов «вверх», так что движение падения рельсового транспортного средства в направлении плоскости ε рельсов выступает в характеристике как «отрицательная» скорость. Конечно, направление действия датчика BSE ускорения может также ориентироваться в направлении плоскости ε рельсов, причем тогда возникла бы зеркальная относительно нулевой линии NUL характеристика скорости FAG падения.
Окончание движения падения рельсового транспортного средства характеризуется минимумом MIN временной характеристики. Минимум MIN соответствует при сходе с рельсов по времени наезду рельсового транспортного средства на колею. За этим на основе ускорения, действующего вверх вследствие попадания на колею, следует положительное значение скорости падения.
Также блок ASW обработки может содержать фильтр FIL для устранения низкочастотных помех перед интегрированием, вызванных, например, дрейфовыми явлениями и низкочастотными электромагнитными паразитными связями, чтобы улучшить отношение сигнал/шум. Для резкого отделения полезного и паразитного сигналов используют предпочтительно фильтр с быстрым переходом от полосы заграждения к полосе пропускания. Фильтры с быстрым переходом от заграждающего к пропускающему частотному диапазону могут изменять фазовые отношения между отдельными частотными составляющими интегрируемого сигнала. Это может привести к тому, что характеристику движения падения не удастся больше правильно реконструировать посредством интегрирования.
По этой причине используют предпочтительно фильтр, не изменяющий фазовых отношений отдельных содержащихся в сигнале частотных составляющих по отношению друг к другу. Это условие выполнено, например, для фильтров Бесселя или КИХ-фильтров. Предпочтительным образом фильтрация сигнала происходит посредством относящегося к семейству фильтров Бесселя фильтра верхних частот. Для критических с точки зрения надежности применений фильтрам Бесселя следует отдать предпочтение перед КИХ-фильтрами, поскольку сопоставимые КИХ-фильтры имеют более длительное время реакции.
Резюмируя вышесказанное, следует заметить, что большое преимущество способа согласно изобретению заключается в том, что его можно реализовать очень легко, также аппаратными средствами и что он очень хорошо подходит для критических с точки зрения надежности применений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ПОВОРОТНОЙ ТЕЛЕЖКИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩЕЙ, ПО МЕНЬШЕЙ МЕРЕ, ОДНУ КОЛЕСНУЮ ПАРУ | 2010 |
|
RU2540362C2 |
| СПОСОБ КОНТРОЛЯ КРИТИЧЕСКОГО СОСТОЯНИЯ ПОДВИЖНОГО СОСТАВА НА РЕЛЬСОВОМ ПУТИ И РЕГИСТРАЦИИ ЕГО СХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399524C1 |
| СПОСОБ ВЫЯВЛЕНИЯ СХОДА С РЕЛЬС НА ОСНОВЕ СИГНАЛОВ О ЧИСЛЕ ОБОРОТОВ КОЛЕСА | 2017 |
|
RU2722513C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2743642C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2524805C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОЙ СКОРОСТИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2653767C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 1997 |
|
RU2134319C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2392140C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ЭКСПЛУАТАЦИОННЫХ АНОМАЛИЙ В ПОЕЗДНЫХ СОСТАВАХ И ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНАХ | 2014 |
|
RU2677840C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
Ускорение колеса измеряют перпендикулярно плоскости рельса с помощью датчика ускорения. По сформированному датчиком ускорения сигналу ускорения посредством однократного интегрирования задаваемой по временному интервалу величины блоком обработки вычисляют скорость падения колеса в направлении плоскости рельса. С помощью вычисленной скорости падения проверяют, имеет ли место состояние схода с рельса. Просто, экономично, быстро и с высокой надежностью обнаруживается сход с рельса колесной пары. 2 н. и 18 з.п. ф-лы, 3 ил.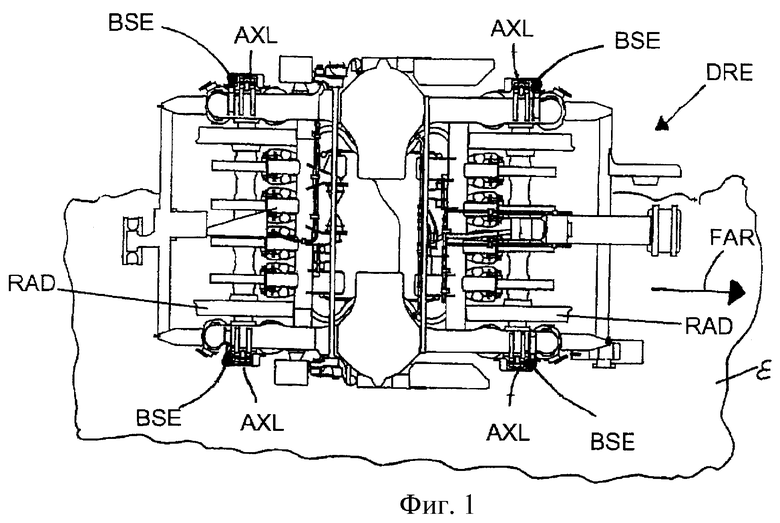
| ЕР 1236631 A1, 04.09.2002 | |||
| EP 1104734 A1, 06.06.2001 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| ХУБАХЕР В., ШАЙБЕР П | |||
| Детекторы схода с рельсов | |||
| // Железные дороги мира [он-лайн], 03/2001 [найдено 30.10.2006] | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

