Изобретение относится к устройству управления рельсовым транспортным средством с устройством управления торможением, содержащим электронный блок управления торможением для подачи управляющих команд тормозным актуаторам, и/или с противоюзным устройством, которое в зависимости от, по меньшей мере, одного сигнала скорости вращения, подаваемого противоюзным датчиком электронному противоюзному блоку управления, регулирует скольжение колес, по меньшей мере, одной оси, и/или с устройством контроля качения, содержащим электронный блок управления для контроля качения и, по меньшей мере, один датчик контроля качения для регистрации скорости вращения, по меньшей мере, некоторых колес в виде сигнала скорости вращения, а также с устройством контроля и/или диагностики шасси в отношении критических состояний и повреждений, таких, например, как сход с рельсов, перегретые подшипники, нестабильный ход и т.п., содержащим электронный блок управления для контроля шасси, согласно ограничительной части пункта 1 формулы изобретения.
Противоюзные устройства предписаны, согласно памятке МСЖД 541-05, для всех рельсовых транспортных средств с высокоэффективными тормозами типа R, причем каждая тележка должна контролироваться отдельно. Посредством таких противоюзных устройств должно предотвращаться блокирование колесных пар при торможении и достигаться оптимальное использование имеющегося в распоряжении силового замыкания между колесом и рельсом. За счет этого можно избежать лысок на колесах и сократить тормозные пути. Для этого скорости вращения всех осей подвижной единицы регистрируются датчиками частоты вращения. Из этих данных микропроцессор электронного противоюзного блока управления вычисляет фактическую скорость подвижного состава или поезда и уменьшает заданное устройством управления тормозами давление в тормозных цилиндрах посредством электропневматических противоюзных клапанов на осях или тележках. Такие электронные противоюзные блоки управления имеются обычно в любом пассажирском поезде.
Для подвижных составов с максимальной скоростью свыше 200 км/ч памятка МСЖД 541-05 предписывает помимо противоюзного устройства дополнительно устройство контроля качения, которое регистрирует нарушения вращения или невращение колес и подает соответствующий сигнал оповещения. Такие устройства контроля качения содержат датчики частоты вращения, которые регистрируют скорости вращения колес подвижной единицы и подают блоку управления для контроля качения соответствующие сигналы.
В настоящее время в железнодорожных перевозках все большее значение приобретают устройства контроля шасси. По причинам безопасности эти системы контроля нормируются инструкциями. Примерами этого являются следующие системы, требуемые на основе технических спецификаций по интероперабельности (TSI) в Официальном бюллетене Европейской компании высокоскоростных поездов:
- бортовые системы детектирования схода с рельсов;
- бортовые системы детектирования перегрева или обнаружения повреждений подшипников;
- бортовые системы обнаружения нестабильного хода или дефектных амортизаторов.
Такие устройства контроля шасси уже имеются в действии. Так, например, в скоростном поезде ICE (Inter-City Express) используется система обнаружения нестабильного хода, а в новейших автоматических метро - система детектирования схода с рельсов. Общим для этих систем является то, что они функционально построены в виде систем «stand alone» и действуют сами по себе.
Проблема этих устройств контроля шасси в виде отдельно построенных систем (решение «stand alone») состоит в относительно высоких расходах на их реализацию, поскольку установка такой системы требует дополнительных узлов, датчиков, кабельной разводки и конструктивного пространства. Кроме того, повышается комплексность технического оборудования, что негативно сказывается на надежности.
В основе изобретения лежит задача усовершенствования устройства управления описанного выше рода таким образом, чтобы избежать названных выше недостатков.
Согласно изобретению эта задача решается посредством признаков пункта 1 формулы изобретения.
Согласно изобретению электронный блок управления для контроля шасси объединен с электронным противоюзным блоком управления и/или с электронным блоком управления тормозами и/или с блоком управления для контроля качения в один конструктивный блок.
Блок управления для контроля шасси требует, в частности, сигналов скорости вращения колесных осей или колес для осуществления функции контроля. Эти сигналы могут направляться дальше внутрь с небольшими затратами, если блок управления для контроля шасси соединен с противоюзным блоком управления и/или с блоком управления тормозами и/или с блоком управления для контроля качения в один конструктивный блок или имеется в виде интегрированной конструкции. Кроме того, различные сигналы состояния об актуальном характере торможения и движения имеются в непосредственном распоряжении у встроенных в контрольный блок управления алгоритмов контроля и обеспечивают более эффективную диагностику.
Конструктивный блок из блока управления для контроля шасси и противоюзного блока управления и/или блока управления для контроля качения и/или блока управления тормозами дает также возможность совместного использования определенных компонентов системы, например общего устройства питания, общего устройства сопряжения для связи с машинистом и общего устройства сопряжения для связи с системой управления подвижным составом. Это уменьшает аппаратные затраты. При использовании более мощного вычислительного блока возможна также параллельная обработка алгоритмов противоюзной защиты, контроля качения и контроля шасси.
Не в последнюю очередь использование устройства контроля шасси для диагностики и раннего обнаружения поврежденных деталей, критических состояний или прочих дефектов, например обнаружения лысок на колесах или раннего обнаружения повреждений подшипников, может обеспечить раннее и ориентированное на состояние обслуживание. Целью являются при этом меньшие простои, лучшее использование деталей и тем самым экономия издержек.
За счет приведенных в зависимых пунктах мер возможны предпочтительные модификации и усовершенствования охарактеризованного в них изобретения.
Особенно предпочтительно блок управления для контроля шасси обрабатывает сигнал скорости вращения от датчика контроля качения и/или противоюзного датчика. При этом использование датчиков, которые подают сигналы частоты вращения осей и/или колес одновременно устройству контроля шасси и/или противоюзному устройству и/или устройству контроля качения и/или устройству управления тормозами, уменьшает затраты на установку датчиков и кабельную разводку. По частоте вращения осей и/или колес можно с помощью устройства контроля шасси сделать вывод о возможных повреждениях.
Особенно предпочтительно корпус электронного блока управления для контроля шасси и/или корпус электронного противоюзного блока управления и/или корпус электронного блока управления тормозами и/или корпус блока управления для контроля качения прифланцованы друг к другу. В качестве альтернативы, по меньшей мере, часть электронного блока управления для контроля шасси и/или электронного противоюзного блока управления и/или блока управления для контроля качения и/или электронного блока управления тормозами могут быть размещены в общем корпусе.
Согласно одной модификации устройство контроля шасси и/или противоюзное устройство и/или устройство управления тормозами и/или устройство контроля качения содержат, по меньшей мере, одно общее устройство питания и/или общее устройство сопряжения для связи с машинистом и/или общее устройство сопряжения для связи с системой управления транспортным средством. Вследствие этого узлы из различных устройств могут рентабельно использоваться сообща. Общее устройство сопряжения для связи с системой управления транспортным средством подключено, в частности, к шине транспортного средства, чтобы передать на индикаторное устройство, например, критические состояния, детектированные устройством контроля шасси.
Датчик частоты вращения, первоначально приданный только противоюзному устройству и/или устройству контроля шасси и предусмотренный прежде всего только для измерения частоты вращения, может быть выполнен в виде комбинированного датчика, который помимо сигнала частоты вращения колес или осей подает также сигнал температуры подшипника колесной пары и/или сигнал господствующих на подшипнике колесной пары колебаний. При этом комбинированный датчик расположен преимущественно непосредственно на контролируемом подшипнике колесной пары или в непосредственной близости от подшипника колесной пары.
Пример осуществления изобретения изображен на чертежах и более подробно поясняется в нижеследующем описании. На чертежах представляют:
- фиг.1: схематично противоюзное устройство вагона пассажирского поезда в предпочтительном варианте;
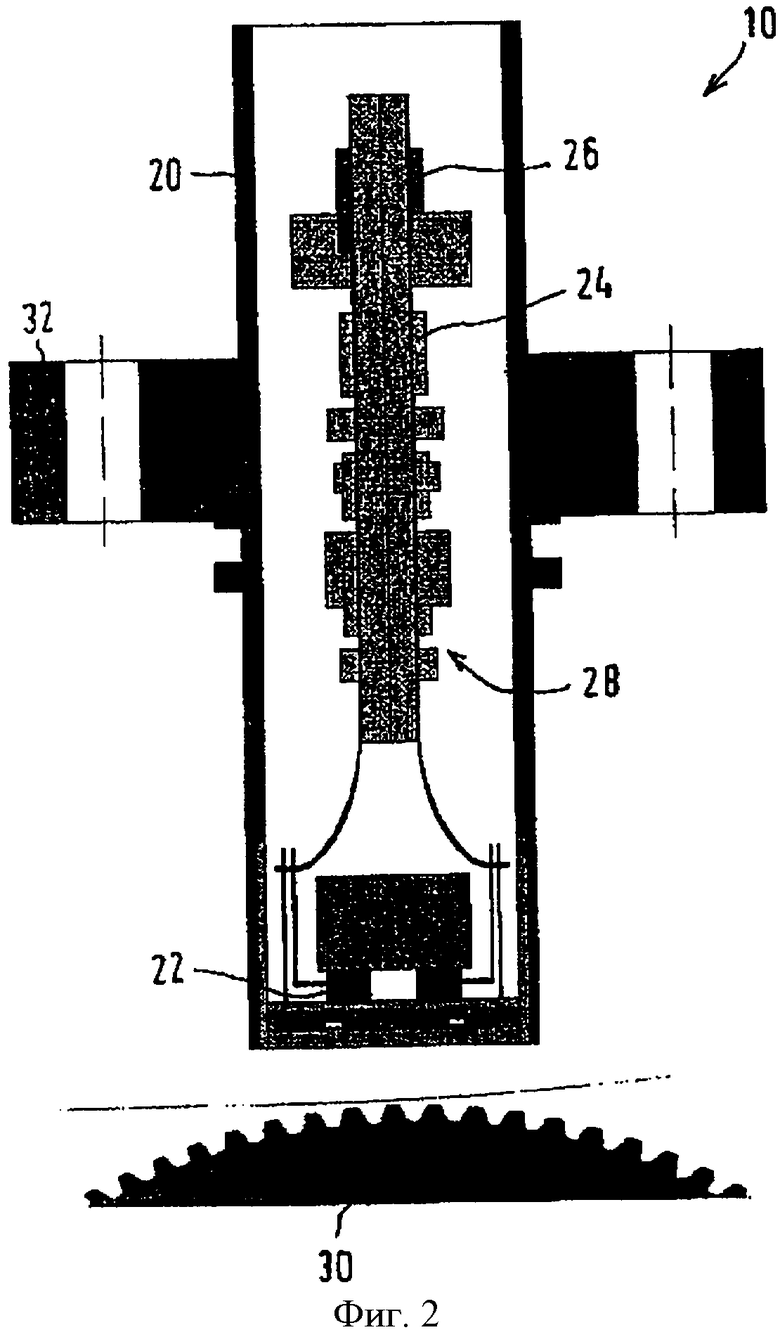
- фиг.2: схематичное сечение используемого в противоюзном устройстве комбинированного датчика.
На фиг.1 схематично изображено противоюзное устройство 1 вагона 2 пассажирского поезда с двумя двухосными тележками 4, 6, рассчитанного, например, на скорость до 200 км/ч.
Противоюзное устройство 1 содержит электронный противоюзный блок 8 управления и датчики 10, например на каждом колесе 12 оси 14 тележки 4, 6, посредством которых детектируется скорость вращения соответствующей оси или соответствующего колеса в данный момент. На фиг.1 для наглядности такой датчик 10 изображен, однако, только на одной стороне оси. Известным образом микропроцессор электронного противоюзного блока 8 управления вычисляет фактическую скорость подвижного состава или поезда и уменьшает на осях заданное расположенным в локомотиве (не показан) устройством управления тормозами давление в тормозном цилиндре 15 посредством электропневматических противоюзных клапанов 16. Оси 14 установлены с возможностью вращения посредством двух близких к колесам подшипников 18 колесных пар на соответствующей тележке 4, 6, причем из подшипников 18 колесных пар на фиг.1 показано, однако, только по одному на каждую ось 14.
Каждому подшипнику 18 колесной пары оси 14 придан изображенный на фиг.2 комбинированный датчик 10, с помощью которого измеряется скорость вращения соответствующей оси 14 или соответствующего колеса 12 в данный момент, температура соответствующего подшипника 18 колесной пары в данный момент и, по меньшей мере, его продольное ускорение.
Согласно одному особенно предпочтительному варианту в проходящем поперек колесной оси корпусе 20 комбинированного датчика 10 расположены датчик 22 Холла, температурный датчик 24, датчик 26 ускорения и обрабатывающая электронная схема 28 для формирования и подачи сигнала скорости вращения, сигнала температуры и, по меньшей мере, одного сигнала ускорения. Напротив датчика 22 Холла расположен вращающийся вместе с соответствующей осью 14 или соответствующим колесом 12 индуктор 30, за счет вращения которого формируется сигнал скорости вращения соответствующей оси 14 или соответствующего колеса 12 в данный момент. Корпус 20 содержит преимущественно наружный фланец 32, посредством которого комбинированный датчик 10 может быть разъемно закреплен непосредственно на соответствующем подшипнике 18 колесной пары. За счет этого воздействующий на подшипник 18 колесной пары шум, который происходит, например, от лысок на колесе 12 оси 14 или от дефектного подшипника 18 колесной пары, передается на корпус 20 комбинированного датчика 10 и может затем детектироваться датчиком 26 ускорения. Он выполнен преимущественно для измерений продольных колебаний по всем трем пространственным осям, однако могут быть представлены также меньше направлений измерений. Таким же образом на температурный датчик 24 передается господствующая в соответствующем подшипнике 18 колесной пары температура.
Эти сигналы передаются обрабатывающей электронной схемой 28, в том числе на блок 34 управления для контроля шасси устройства 36 контроля шасси, который может выполнять следующие функции контроля:
- детектирование нагрева и перегрева соответствующего подшипника 18 колесной пары за счет контроля его температуры;
- обнаружение повреждения соответствующего подшипника 18 колесной пары за счет соответствующих сигналов колебаний;
- обнаружение нестабильного хода или дефектных амортизаторов в шасси за счет соответствующих сигналов колебаний;
- детектирование схода с рельсов;
- детектирование лысок и некруглых колес 12 за счет соответствующих сигналов колебаний.
Функции детектирования схода с рельсов, обнаружение перегрева и детектирование нестабильного характера хода являются требованиями и рекомендациями TSI для высокоскоростных поездов. Сигналы температуры, скорости вращения и ускорения комбинированных датчиков 10 могут быть дополнительно привлечены в качестве диагностических данных для раннего обнаружения дефектных деталей или отрезков рельсов.
Блок 34 управления для контроля шасси объединен с противоюзным блоком 8 управления в один конструктивный блок 38. Это может быть реализовано, например, за счет того, что корпус электронного блока 34 управления для контроля шасси и корпус электронного противоюзного блока 8 управления прифланцованы друг к другу. Предпочтительно, однако, электронный блок 34 управления для контроля шасси и электронный противоюзный блок 8 управления размещены в общем корпусе 40.
Устройство 36 контроля шасси и противоюзное устройство 1 могут содержать, по меньшей мере, одно общее устройство 41 питания, общее устройство 42 сопряжения для связи с машинистом и общее устройство 44 сопряжения для связи с системой управления подвижным составом. Общее устройство 44 сопряжения для связи с системой управления подвижным составом подключено, в частности, к шине 46 транспортного средства, чтобы передать на индикаторное устройство, например, критические состояния, детектированные устройством 36 контроля шасси.
В случае, если соответствующее рельсовое транспортное средство является не вагоном 2 пассажирского поезда, а локомотивом, то в нем имеется центральный электронный блок управления тормозами устройства управления тормозами, который управляет и регулирует процессы торможения всего подвижного состава.
В случае, если вагон пассажирского поезда или локомотив рассчитан на скорости свыше 200 км/ч, помимо противоюзного устройства 1 дополнительно имеется устройство контроля качения с электронным блоком управления для контроля качения, который принимает сигналы частоты вращения от комбинированного датчика 10 и определяет по ним, имеют ли место нарушения качения или вращения колес рельсового транспортного средства.
В зависимости от оснащения и типа рельсового транспортного средства электронный блок управления для контроля шасси должен быть тогда объединен с электронным противоюзным блоком управления и/или с электронным блоком управления тормозами и/или с электронным блоком управления контроля качения в один конструктивный блок.
Перечень ссылочных позиций
1 - противоюзное устройство
2 - вагон пассажирского поезда
4 - тележка
6 - тележка
8 - противоюзный блок управления
10 - комбинированный датчик
12 - колесо
14 - ось
15 - тормозной цилиндр
16 - противоюзный клапан
18 - подшипник колесной пары
20 - корпус
22 - датчик Холла
24 - температурный датчик
26 - датчик ускорения
28 - обрабатывающая электронная схема
30 - индуктор
32 - наружный фланец
34 - блок управления для контроля шасси
36 - устройство контроля шасси
38 - конструктивный блок
40 - корпус
41 - устройство питания
42 - устройство сопряжения
44 - устройство сопряжения
46 - шина транспортного средства
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПРОСКАЛЬЗЫВАНИЯ КОЛЕСНЫХ ПАР ПРИ ТОРМОЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2021 |
|
RU2770941C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПОВРЕЖДЕНИЙ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ ЕДИНИЦ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2494902C2 |
| ПРОТИВОЮЗНОЕ УСТРОЙСТВО РЕЛЬСОВОГО ЭКИПАЖА | 2004 |
|
RU2267419C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2362692C2 |
| СПОСОБ УПРАВЛЕНИЯ СНАБЖЕННОЙ ПРОТИВОЮЗНЫМ РЕГУЛЯТОРОМ ФРИКЦИОННОЙ ТОРМОЗНОЙ СИСТЕМОЙ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2564461C2 |
| ТОРМОЗ ПАССАЖИРСКОГО ВАГОНА | 2005 |
|
RU2298501C1 |
| ПРОТИВОЮЗНЫЙ РЕГУЛЯТОР | 2004 |
|
RU2260531C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2524805C2 |
| УЛУЧШЕННОЕ ТОРМОЖЕНИЕ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2637083C2 |
| ОПРЕДЕЛЕНИЕ ОСТАНОВКИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2644809C2 |
Изобретение относится к устройствам управления рельсовыми транспортными средствами. Противоюзное устройство (1) содержит электронный противоюзный блок (8) управления и датчики (10) на каждом колесе (12) оси (14) тележки (4), (6), посредством которых детектируется скорость вращения соответствующей оси или соответствующего колеса в данный момент. Микропроцессор электронного противоюзного блока (8) управления вычисляет фактическую скорость подвижного состава или поезда и уменьшает на осях заданное расположенным в локомотиве устройством управления тормозами давление в тормозном цилиндре (15) посредством электропневматических противоюзных клапанов (16). Оси (14) установлены с возможностью вращения посредством двух близких к колесам подшипников (18) колесных пар на соответствующей тележке (4), (6). На каждом подшипнике (18) колесной пары оси (14) установлен датчик (10), с помощью которого измеряется скорость вращения соответствующей оси (14) или соответствующего колеса (12) в данный момент, температура соответствующего подшипника (18) колесной пары в данный момент и, по меньшей мере, его продольное ускорение. Технический результат заключается в повышения надежности устройства управления и его усовершенствовании за счет снижения затрат на реализацию. 2 н. и 8 з.п. ф-лы, 2 ил.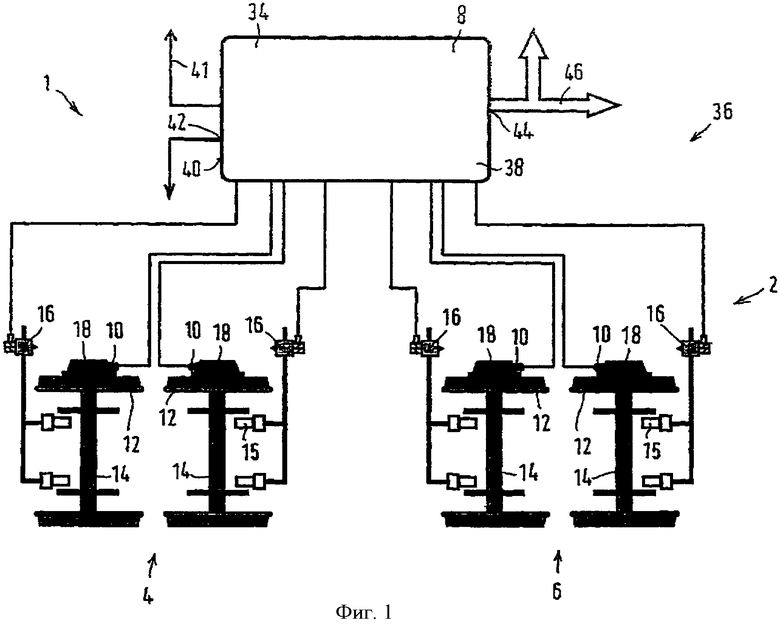
1. Устройство управления рельсовым транспортным средством (2) с устройством управления торможением, содержащим электронный блок управления торможением для подачи управляющих команд тормозным актуаторам, и/или с противоюзным устройством (1), выполненным с возможностью регулирования скольжения колес (12), по меньшей мере, одной оси (14) в зависимости от, по меньшей мере, одного сигнала скорости вращения, подаваемого противоюзным датчиком (10) электронному противоюзному блоку (8) управления, и/или с устройством контроля качения, содержащим электронный блок управления для контроля качения и, по меньшей мере, один датчик контроля качения для регистрации скорости вращения, по меньшей мере, некоторых колес в виде сигнала скорости вращения, а также с устройством (36) контроля и/или диагностики шасси в отношении критических состояний и повреждений, таких, например, как сход с рельсов, перегретые подшипники, нестабильный ход и подобные состояния, содержащим электронный блок (34) управления для контроля шасси, отличающееся тем, что электронный блок (34) управления для контроля шасси объединен с электронным противоюзным блоком (8) управления, и/или с электронным блоком управления тормозами, и/или с электронным блоком управления для контроля качения в один конструктивный блок (38), причем блок (34) управления для контроля шасси выполнен с возможностью обработки сигнала скорости вращения от датчика контроля качения и/или противоюзного датчика (10) и устройство (36) контроля шасси, и/или противоюзное устройство (1), и/или устройство управления тормозами, и/или устройство контроля качения содержат, по меньшей мере, одно общее устройство (41) питания и общее устройство (42) сопряжения для связи с машинистом и общее устройство (44) сопряжения для связи с системой управления транспортным средством.
2. Устройство по п.1, отличающееся тем, что корпус электронного блока управления для контроля шасси, и/или корпус электронного противоюзного блока управления, и/или корпус электронного блока управления тормозами, и/или корпус блока управления для контроля качения прифланцованы друг к другу.
3. Устройство по п.1, отличающееся тем, что, по меньшей мере, часть электронного блока (34) управления для контроля шасси, и/или электронного противоюзного блока (8) управления, и/или электронного блока управления тормозами, и/или блока управления для контроля качения размещена в общем корпусе (40).
4. Устройство по любому из пп.1-3, отличающееся тем, что общее устройство (44) сопряжения для связи с системой управления транспортным средством подключено к шине (46) транспортного средства.
5. Устройство по п.4, отличающееся тем, что система управления транспортным средством содержит индикаторное устройство для сообщения о критических состояниях, детектированных устройством (36) контроля шасси.
6. Устройство по любому из пп.1-3, 5, отличающееся тем, что датчик контроля качения и/или противоюзный датчик представляет собой комбинированный датчик (10), выполненный с возможностью подачи, помимо сигнала скорости вращения, по меньшей мере, одного колеса или оси, сигнала температуры подшипника (18) колесной пары и/или сигнала господствующих на подшипнике (18) колесной пары колебаний.
7. Устройство по п.4, отличающееся тем, что датчик контроля качения и/или противоюзный датчик представляет собой комбинированный датчик (10), выполненный с возможностью подачи, помимо сигнала скорости вращения, по меньшей мере, одного колеса или оси, сигнала температуры подшипника (18) колесной пары и/или сигнала господствующих на подшипнике (18) колесной пары колебаний.
8. Устройство по п.6, отличающееся тем, что комбинированный датчик (10) расположен непосредственно на подшипнике (18) колесной пары или в непосредственной близости от подшипника (18) колесной пары.
9. Устройство по п.7, отличающееся тем, что комбинированный датчик (10) расположен непосредственно на подшипнике (18) колесной пары или в непосредственной близости от подшипника (18) колесной пары.
10. Рельсовое транспортное средство, содержащее устройство управления по одному из пп.1-9.
| DE 10332024 A1, 24.02.2005 | |||
| DE 20220772 U1, 29.04.2004 | |||
| DE 10146093 A1, 03.04.2003. |

