Настоящее изобретение относится к способу выявления состояния схода с рельс одного или нескольких колес рельсового транспортного средства на основе сигналов о числе оборотов колеса.
В режиме движения рельсовых транспортных средств, в частности длинных составов, существует возможность, что отдельные колеса, колесные пары или вся колесная тележка сходят с рельс незаметно для машиниста. При этом рельсовое транспортное средство тащит за собой сошедшие с рельс колеса, колесные пары, поворотную тележку или весь вагон, причем, например, колесо постоянно соударяется с поверхностью полотна. Это может привести к значительным повреждениям верхнего строения железнодорожного пути, рельсового транспортного средства или и того и другого.
Другой большой риск аварии состоит в том, что сошедшее с рельс рельсовое транспортное средство не ориентировано больше в нормальном направлении движения, а в проекции перпендикулярно направлению движения выходит за границы обычной ширины транспортного средства. Это может привести к значительному материальному ущербу и человеческим жертвам при столкновении рельсового транспортного средства с препятствием, например с въездом в туннель или опорой моста.
Поэтому целесообразно своевременно выявлять сход с рельс отдельных колес, колесных пар, поворотных тележек или всего вагона и принимать соответствующие контрмеры. При этом контрмеры принимаются автоматически или их инициирует машинист. Контрмерой является, например, прямое торможение сошедшего с рельс транспортного средства до его полной остановки.
Кроме этого предпочтительно наличие способа для достоверного выявления критической дорожной ситуации и инициирования соответствующих контрмер.
Выявление схода с рельс является теперь необходимым согласно различным предписаниям и стандартам, например DIN EN 62267 предписывает систему распознавания схода с рельс в роботизированном режиме движения.
Исходя из этого, ряд подобных систем промышленно применяют или они описаны в патентах.
В WO 2012140073 A1 описан способ выявления схода с рельс посредством разницы сигналов фактического числа оборотов колеса и заданного числа оборотов. Для обеспечения возможности постоянного достоверного определения режима движения в расчет принимают коэффициент износа колес, так как износ колеса влияет на изменение соотношения числа оборотов колеса и скорости движения.
В WO 2001094174 A1 описан способ выявления схода с рельс посредством сравнения между собой числа оборотов или сравнения числа оборотов колеса с усредненным параметром числа оборотов нескольких колес.
В обоих изобретениях для выявления схода с рельс используют отклонение, по меньшей мере, сигнала числа оборотов от заданного параметра. Основным недостатком при этом является то, что возникающие колебания числа оборотов могут ошибочно превосходить пороговые значения и, тем самым, вызывать необходимость сравнительно трудоемкой обработки данных для достоверного выявления схода с рельс.
В EP 1236633 A2 описан способ выявления схода с рельс посредством обработки самых различных параметров, в том числе обработку данных угловой скорости или углового ускорения колеса.
Для выявления схода с рельс предложена двойная дифференциация по времени частоты вращения колес и выявление таким путем переменного характера ускорения колеса или колесного вала, характерного для схода с рельс. Этот переменный характер ускорения колеса или колесного вала вызывает также неравномерное биение сошедшего с рельс колеса по грунту.
Однако обработка дифференсации временного сигнала колеса постоянно требует больших затрат, так как и торможения с разной по времени задержкой во второй дифференсации частоты вращения колеса отличны от нуля и, тем самым, заметны.
В другом варианте осуществления данного изобретения описано сравнение числа оборотов колес между собой аналогично WO 2001094174 A1.
Для осуществления способа кроме определения частоты вращения необходимы, например, сигналы ускорения, что предъявляет дополнительные требования к установленным в рельсовом транспортном средстве датчикам.
Задача данного изобретения - предложить способ, решающий указанные проблемы и отличающийся предпочтительно использованием штатно установленных в транспортном средстве или легко устанавливаемых в нем датчиков и устройств обработки данных, и который несложно осуществить на штатном устройстве управления.
Эта задача решена посредством признаков независимых пунктов формулы изобретения. Предпочтительные варианты усовершенствования раскрыты в зависимых пунктах формулы.
Предпочтительно в способе используют сигнал числа оборотов, по меньшей мере, от устройства фиксирования числа оборотов, предпочтительно штатно установленного в рельсовом транспортном средстве, для определения числа оборотов колеса, чтобы получить данные о фактическом режиме движения (например, число оборотов колеса или скорость).
Это устройство фиксирования числа оборотов выполнено предпочтительно в виде датчика числа оборотов, генерирующего из числа оборотов колеса сигналы тактового импульса.
Возможны варианты осуществления со схемой и компоновкой датчиков, обеспечивающих возможность измерения числа оборотов отдельных колес, колесных пар или всей поворотной тележки.
Исходный сигнал датчика числа оборотов может быть при этом в аналоговой или цифровой форме. Исходный сигнал датчика числа оборотов представлен при этом предпочтительно в виде индукторной частоты, угловой скорости или в другой соответствующей форме.
Исходный сигнал числа оборотов направляют для дальнейшей обработки в блок обработки данных, предпочтительно имеющий сектора подготовки сигнала, определения параметрического значения и оценки рабочего режима транспортного средства.
Предпочтительно исходный сигнал числа оборотов передают сначала в сектор подготовки сигнала, в котором сигнал готовят к дальнейшей обработке. При этом для исходного сигнала числа оборотов предпочтительно применяют методику формирования сигнала и методику предварительного анализа исходного сигнала датчика числа оборотов, например, сглаживающую фильтрацию, оцифровывание аналогового сигнала, изменение или настройку считывания, компенсацию смещения, физический обсчет, преобразование Фурье, создание модуляционных огибающих, определение экстремальных значений, проверку достоверности и т.д.
Предпочтительный вариант создания модуляционных огибающих – это, например, создание рукавных модуляционных огибающих вокруг исходного сигнала числа оборотов, например, для упрощения описания временной характеристики исходного сигнала числа оборотов. При этом модуляционную огибающую определяют по максимальному и минимальному значению исходного сигнала числа оборотов или по приблизительной характеристики исходного сигнала числа оборотов.
Достоверность исходного сигнала числа оборотов проверяют, как правило, посредством соответствующих алгоритмов на принципиальную достоверность, т.е. на физическую правильность, принятого исходного сигнала числа оборотов или на его соответствие фактическому рабочему режиму транспортного средства. Например, предпочтительно, если исходный сигнал числа оборотов на одном колесе составляет
-0.000 min-1 при значениях числа оборотов на других колесах +2000 min-1, его считают недостоверным и далее не принимают во внимание.
В способе по данному изобретению за сектором формирования сигнала следует предпочтительно сектор определения параметрического значения, в котором на основе сигнала числа оборотов, сформированного в секторе формирования сигнала, определяют параметрическое значение в данном рабочем режиме рельсового транспортного средства.
Это параметрическое значение описывает предпочтительно силу колебаний сигнала числа оборотов колеса, колесной пары или всей поворотной тележки.
При этом основной идеей определения параметрического значения является постоянное наличие определенных колебаний числа оборотов колеса, катящегося по рельсу, независимо от того, постоянны ли его скорость, ускорение или замедление. Эти колебания могут быть вызваны, например, производственными допусками, износом, силовым замыканием в точке контакта колесо-рельс или колебаниями в приводном блоке транспортного средства.
Однако эти колебания имеют значительно более низкую силу, чем колебания числа оборотов сошедшего с рельс колеса, которое из-за неравномерных соприкосновений с грунтом испытывает ускорение или замедление.
Далее описаны варианты осуществления изобретения для определения параметрического значения, являющегося мерой величины для силы колебаний числа оборотов колеса. Преимуществом определения силы колебаний является ненужность точного определения числа оборотов - вместо этого необходимо только определить силу колебаний числа оборотов.
Определение силы колебаний сигнала числа оборотов осуществляют предпочтительно соответствующим методом анализа, например, определением вариативности сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов определяют предпочтительно в качестве стандартного отклонения сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов определяют предпочтительно в качестве квадратичной постоянной составляющей сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов определяют предпочтительно в качестве арифметической постоянной составляющей сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов определяют предпочтительно в качестве амплитуды сигнала числа оборотов, т.е. как разницу между соответствующим максимальным и минимальным значением за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов описывают предпочтительно в качестве изменения частотных долей сигнала числа оборотов за скользящий промежуток времени. Эти частотные доли определяют предпочтительно методом анализа Фурье за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов описывают предпочтительно в качестве квантиля сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов описывают предпочтительно в качестве срединного значения сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов описывают предпочтительно в качестве вариативного коэффициента сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов описывают предпочтительно в качестве среднего абсолютного интервала сигнала числа оборотов за скользящий промежуток времени.
В другом предпочтительном варианте осуществления изобретения силу колебаний сигнала числа оборотов описывают предпочтительно в качестве интерквантильного интервала сигнала числа оборотов за скользящий промежуток времени.
Как указано выше, преимуществом этого варианта осуществления является то, что нет необходимости определять точное число оборотов, а только силу колебаний числа оборотов.
Сам скользящий промежуток времени, определяющий время изучения или анализа сигнала числа оборотов, определяют предпочтительно таким образом, чтобы обеспечить возможность достоверного различения состояний “НЕТ схода с рельс” и “ЕСТЬ сход с рельс”. При этом интервал скользящего промежутка времени составляет от малого значения 0,1 сек. до больших значений в несколько секунд или более. При определении скользящего промежутка времени предпочтительно учитывают также частоту сканирования сигнала. Как правило, определение соответствующего промежутка времени - это задача разработчика.
В другом предпочтительном варианте осуществления изобретения скользящий промежуток времени является предпочтительно вариабельным. Ширину анализируемого промежутка времени определяет предпочтительно скорость рельсового транспортного средства, и с ростом скорости она предпочтительно уменьшается.
В другом предпочтительном варианте осуществления изобретения на колебания в рамках скользящего промежутка времени накладываются факторы веса, за счет чего более старые значения колебаний менее значительны по сравнению с более новыми.
Параметрическое значение, выявленное в секторе определения параметрического значения, передают в сектор генерирования сигнала тревоги, в котором, главным образом, на основе текущего фактического параметрического значения определяют состояние - например, “Некритично” и “Критично”. Некритичное состояние - это, например, накат колеса по рельсу (далее - “НЕТ схода с рельс”), а критичное состояние - это, например, сход колеса с рельс.
Кроме этого возможна индикация других состояний для более точной оценки фактического рабочего режима транспортного средства. Так, например, возможна индикация промежуточных состояний, например, предкритичного состояния, чтобы обратить внимание машиниста на эту ситуацию.
Сектор генерирования сигнала тревоги выдает при сходе с рельс сигнал, информирующий машиниста о критичном состоянии. Этот сигнал - предпочтительно оптический или акустический.
В другом предпочтительном варианте осуществления изобретения предпочтительно сектор генерирования сигнала тревоги или его выходной сигнал инициирует при сходе с рельс действие. Этим действием является предпочтительно аварийное торможение до полной остановки рельсового транспортного средства.
Определение состояния “НЕТ схода с рельс” или “Сход с рельс” в секторе генерирования сигнала тревоги осуществляют предпочтительно путем сравнения параметрического значения силы колебаний числа оборотов колеса, полученного в секторе определения параметрического значения, с пороговым значением.
Пороговое значение определенной силы колебаний, после которого делают вывод о состоянии схода с рельс, задают предпочтительно заранее, чтобы обеспечить надежную возможность выявления схода с рельс.
В другом предпочтительном варианте осуществления изобретения пороговое значение силы колебаний, после которого делают вывод о критичном состоянии, определяют предпочтительно в зависимости от скорости. Так, например, пороговое значение, главным образом, в качестве характеристики силы колебаний числа оборотов колеса задают выше скорости транспортного средства, чтобы обеспечить возможность учитывать и зависящие от скорости силы колебаний числа оборотов колеса.
В другом предпочтительном варианте осуществления изобретения пороговое значение силы колебаний, после которого делают вывод о критичном состоянии, определяют предпочтительно в блоке обработки данных путем постоянного или пофазового онлайн-изучения во время следования по всей маршрутной сети. За счет этого определяют главным образом пороговое значение с учетом особенностей маршрутной сети и постоянным адаптированием к ней. Это обеспечивает возможность главным образом снижения реализационных затрат, так как производитель не обязан иметь и корректировать файлы с данными для каждой страны.
В другом предпочтительном варианте осуществления изобретения вывод о сходе с рельс делают только после превышения порогового значения силы колебаний за определенный промежуток времени. Это обеспечивает определенную стабилизацию обработки данных, что исключает ошибочное выявление состояния схода с рельс из-за кратковременного превышения порогового значения, например, из-за деформированного рельса.
В другом предпочтительном варианте осуществления изобретения проводят сравнительный анализ сил колебаний числа оборотов других колес. Это обеспечивает возможность предпочтительно за счет получения усредненного значения всех сил колебаний сделать вывод о несоответствии одной из них на фактическом участке состоянию схода с рельс.
В другом предпочтительном варианте осуществления изобретения проводят сравнительный анализ фактических сил колебания сигнала числа оборотов колеса с силами колебаний этого же колеса на более ранних этапах, предпочтительно занесенными в память бока обработки данных. Процесс схода с рельс выявляют предпочтительно за счет длительного увеличения силы колебаний сошедшего с рельса колеса. Это осуществляют главным образом анализом абсолютного увеличения силы колебаний или определением градиентов силы колебаний. При этом градиентом является предпочтительно длительное изменение сил колебаний.
Полученный таким образом градиент может быть далее обработан указанными выше методами.
В другом предпочтительном варианте осуществления изобретения скомбинированы, по меньшей мере, два вышеуказанных способа обработки данных. Предпочтительно предложена соответствующая логика выбора, по которой различают сравнительный анализ с пограничным значением или сравнительный анализ с фактическим усредненным значением сил колебаний предпочтительно всех чисел оборотов колес, или сравнительный анализ с более ранними силами колебаний чисел оборотов того же колеса, чтобы принять решение о состоянии “НЕТ схода с рельс” или “Сход с рельс”.
В другом предпочтительном варианте осуществления изобретения состояние “НЕТ схода с рельс” или “Сход с рельс” определяют посредством комбинации, по меньшей мере, двух этих критериев оценки.
Другие предпочтительные варианты осуществления изобретения основаны на комбинировании, по меньшей мере, двух указанных выше вариантов осуществления.
Изобретение предпочтительно в любом варианте осуществления предусматривает возможность комбинирования с другими способами или устройствами выявления схода с рельс или анализа и оценки рабочего режима и имеет предпочтительно соответствующие интерфейсы, обеспечивающие возможность обмена сигналами или данными с другими способами или устройствами. Другие способы или устройства, основанные на измерении и обработке других физических величин или на их использовании, основаны при этом предпочтительно на способах определения частоты шпальных ящиков, перекрестных корреляций ускорений или на сравнительном анализе сигналов числа оборотов колеса и базового числа оборотов, выявленного, например, по зафиксированной на основе GPS скорости.
Предпочтительно изобретение имплементировано в комплекс обнаружения схода с рельс или анализа рабочего режима, обрабатывающий ответные сигналы всех частей системы.
Изобретение представляет собой предпочтительно продукт в виде компьютерной программы, выполняющей указанный выше способ и записанной на машинносчитываемом носителе. Продукт в виде компьютерной программы устанавливают предпочтительно на соответствующие штатные устройства управления рельсового транспортного средства. Таким образом, можно дооборудовать существующие рельсовые транспортные средства.
В другом предпочтительном варианте изобретение выполнено в виде устройства управления, использующего продукт в виде компьютерной программы, выполняющей указанный выше способ и записанной предпочтительно на машинносчитываемом носителе. Преимуществом такого устройства управления является возможность его установки независимо от уже установленного оборудования.
Устройство управления в другом предпочтительном варианте осуществления имеет соответствующие интерфейсы для инициирования операций в рельсовом транспортном средстве. Последние представлены, например, в виде управляемых сигнальных лампочек в кабине машиниста или в виде управляемых сервоприводов тормозной системы.
Далее следует описание изобретения на основе предпочтительных примеров его выполнения со ссылкой на приложенные чертежи.
На чертежах, в частности, представлено следующее:
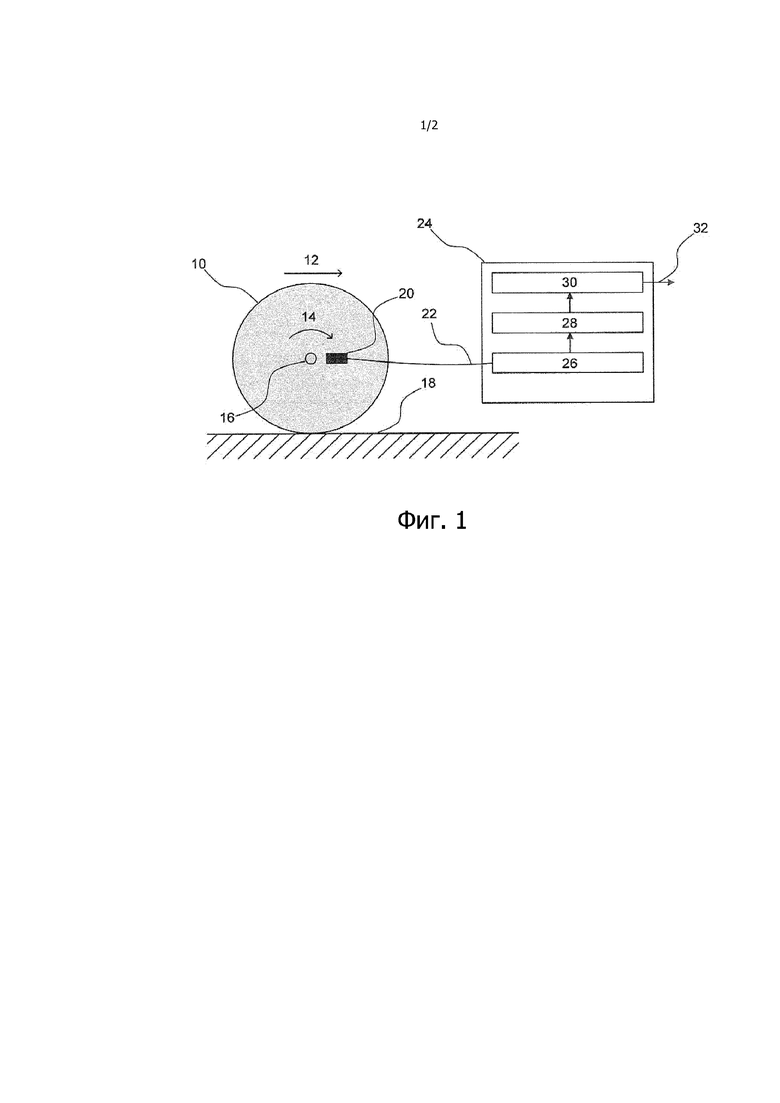
фиг. 1 - принципиального устройство детектирования схода с рельс отдельного колеса и дальнейшая обработка сигналов в блоке обработки данных;
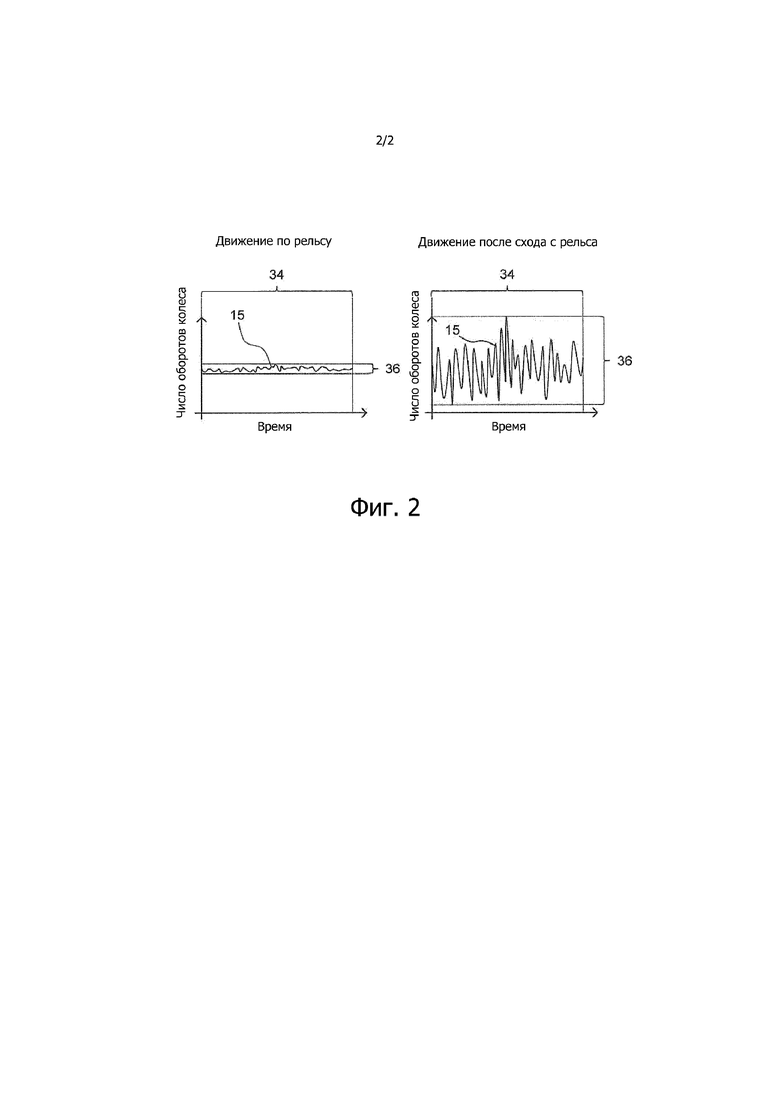
фиг. 2 - временная диаграмма числа оборотов колеса для состояний “Колесо на рельсе” (слева) и “сход колеса с рельса” (справа), а также схема оценки рабочего режима по амплитуде силы колебаний.
На фиг. 1 показан вариант осуществления схемы выявления схода с рельс отдельного колеса 10. Колесо 10 установлено с возможностью вращения на вале, соединенном с рельсовым транспортным средством (не показано), и совершает движение вправо, в направлении движения 12. Колесо 10 совершает при этом вращательное движение 14 вокруг вала 16. Колесо 10 во время движения совершает накат по полотну 18. Полотно 18 является при этом рельсом или верхним строением балластной постели в случае схода с рельса.
На рельсовом транспортном средстве установлено устройство 20 регистрации угловой скорости с возможностью фиксирования числа оборотов колеса 10.
Сигнал 12 числа оборотов на выходе устройства 20 регистрации угловой скорости передают на блок 24 обработки данных. В блоке 24 обработки данных последовательно расположены несколько секторов (26, 28, 30). Сначала исходный сигнал 22 числа оборотов поступает в сектор 26 формирования сигнала, обрабатывающий исходный сигнал 22 числа оборотов посредством соответствующих операций формирования (например, сглаживающей фильтрации, оцифровывания, считывания, компенсации смещения и т.д.) для обеспечения возможности дальнейшего анализа. Сформированный таким образом сигнал поступает в сектор 28 определения параметрического значения.
В секторе 28 определения параметрического значения посредством соответствующих операций обработки данных (например, расчета вариативности, стандартного отклонения, квантильности, квадратического среднего, арифметического среднего, амплитуды, частотных составляющих и т.д.) определяют силу колебания сигнала числа оборотов в качестве параметрического значения фактического рабочего режима. Результат поступает в сектор 30 генерирования сигнала тревоги.
В секторе 30 генерирования сигнала тревоги осуществляют сравнительный анализ определенной силы колебания с пограничными значениями, установленными разработчиком. Дополнительно можно провести сравнительный анализ выявленной силы колебания с силами колебаний других колес, определенной таким же образом, или со средним значением сил колебаний. Также можно провести сравнительный анализ силы колебания колеса за промежуток времени, так что следствием схода с рельс будет повышение силы колебания по отношению к определенным ранее силам колебаний.
Конфигурация сектора 30 генерирования сигнала тревоги обеспечивает возможность сделать вывод об одном из двух состояний “НЕТ схода с рельс” или “Сход с рельс” по одной или нескольким таким операциям сравнительного анализа. При выявлении состояния “Сход с рельс” сектор 30 генерирования сигнала тревоги инициирует операцию 32. При этом речь идет от информирования машиниста до автоматического аварийного торможения до полной остановки состава.
На фиг. 2 показана качественная характеристика по времени числа 15 оборотов колеса 10. При этом на диаграмме слева показана характеристика протекания по времени числа оборотов колеса с постоянной скоростью наката на рельс, т.е. колеса, не сошедшего с рельса.
Характеристика числа 15 оборотов колеса имеет определенные колебания, вызванные производственными допусками, износом или колебаниями в приводном блоке транспортного средства. Однако, эти колебания по сравнению с диаграммой справа значительно слабее.
На диаграмме справа показана типовая качественная характеристика по времени числа 15 оборотов колеса, сошедшего с рельса. Число оборотов имеет значительно более сильные колебания, так как колесо постоянно соударяется с грунтом, будь это обычное верхнее строение со шпалами и щебнем или гладкое бетонное покрытие проезжей части, и за счет этого получает тормозящие или ускорительные импульсы.
На основе этих двух качественных временных характеристик числа 15 оборотов колеса видно, что целесообразно обнаружение схода с рельса колеса путем измерения и обработки данных числа оборотов одного или нескольких колес, чтобы достоверно различать между наличием одного из двух состояний “НЕТ схода с рельс” и “Сход с рельс”.
На диаграммах также показан скользящий временной промежуток, за который анализируют рабочий режим. В качестве примера процесса обработки данных рабочего режима указана амплитуда 36, т.е. разница между максимальным и минимальным значением числа оборотов колеса. У сошедшего с рельса колеса рост амплитуды 36 обеспечивает возможность достоверной идентификации схода с рельса.
Изобретение относится к средствам выявления схода с рельс колес рельсового транспортного средства на основе значения оборотов колес. В способе определяют параметрическое значение силы колебания исходного сигнала (22) числа оборотов, по меньшей мере, одного колеса (10), и для оценки ситуации движения проводят сравнительный анализ указанного параметрического значения с критериями, характерными для критической ситуации, далее способ выявления критической ситуации инициирует осуществление операции в рельсовом транспортном средстве, при этом выявляют критический рабочий режим или сход с рельс посредством сравнительного анализа параметрического значения, по меньшей мере, одного колеса (10) с пороговым значением, пороговое значение запоминают и адаптируют на основе измеренных данных. Причем пороговое значение силы колебаний, после которого делают вывод о критичном состоянии, определяют путем постоянного или пофазового онлайн-изучения во время следования по всей маршрутной сети, за счет чего пороговое значение определяется с учетом особенностей маршрутной сети и постоянным адаптированием к ней. Достигается повышение надежности выявления схода с рельс колес рельсового транспортного средства. 2 н. и 21 з.п. ф-лы, 2 ил.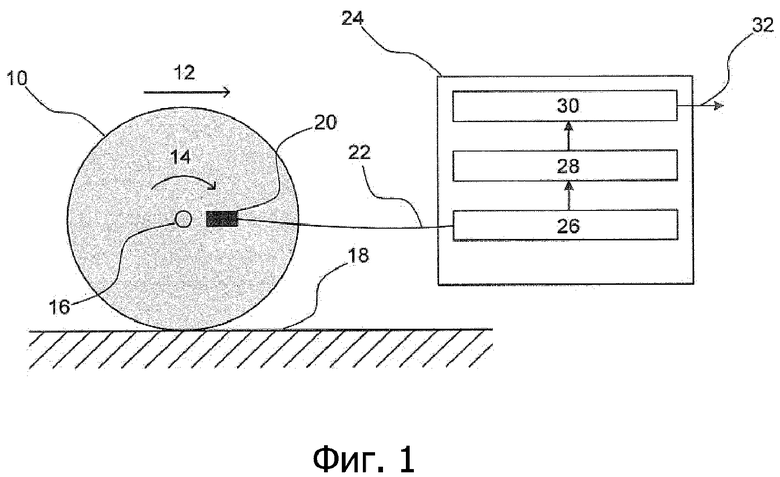
1. Способ определения критической ситуации движения, по меньшей мере, одного колеса (10) рельсового транспортного средства, при котором
- определяют параметрическое значение силы колебания исходного сигнала (22) числа оборотов, по меньшей мере, одного колеса (10), и
- для оценки ситуации движения проводят сравнительный анализ указанного параметрического значения с критериями, характерными для критической ситуации, причем
- способ выявления критической ситуации инициирует осуществление операции в рельсовом транспортном средстве, при этом выявляют критический рабочий режим или сход с рельс посредством сравнительного анализа параметрического значения, по меньшей мере, одного колеса (10) с пороговым значением и пороговое значение посредством способа запоминают и адаптируют на основе измеренных данных.
2. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют вариативность сигнала числа оборотов, по меньшей мере, одного колеса (10).
3. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют стандартное отклонение сигнала числа оборотов, по меньшей мере, одного колеса.
4. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют квадратическое среднее сигнала оборотов, по меньшей мере, одного колеса (10).
5. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют арифметическое среднее сигнала оборотов, по меньшей мере, одного колеса (10).
6. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют амплитуду колебания сигнала оборотов, по меньшей мере, одного колеса (10).
7. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют частотные составляющие сигнала оборотов, по меньшей мере, одного колеса (10).
8. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют квантиль сигнала оборотов, по меньшей мере, одного колеса (10).
9. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют срединное значение сигнала оборотов, по меньшей мере, одного колеса (10).
10. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют вариативный коэффициент сигнала оборотов, по меньшей мере, одного колеса (10).
11. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют абсолютный интервал сигнала оборотов, по меньшей мере, одного колеса (10).
12. Способ по п. 1, при котором в качестве параметрического значения силы колебания числа оборотов колеса используют интерквантильный интервал сигнала оборотов, по меньшей мере, одного колеса (10).
13. Способ по п. 1, при котором пороговое значение - это постоянная величина.
14. Способ по п. 1, при котором пороговое значение определено в зависимости от скорости.
15. Способ по любому из пп. 1-12, при котором выявляют критический рабочий режим или сход с рельс посредством сравнительного анализа, по меньшей мере, параметрических значений двух отдельных колес (10).
16. Способ по любому из пп. 1-12, при котором выявляют критический рабочий режим или сход с рельс посредством сравнительного анализа, по меньшей мере, параметрического значения, по меньшей мере, одного колеса (10) и усредненных параметрических значений других колес (10).
17. Способ по любому из пп. 1-12, при котором выявляют критический рабочий режим или сход с рельс посредством сравнительного анализа, по меньшей мере, одного параметрического значения, по меньшей мере, одного колеса (10) и отнесенных по времени назад параметрических значений этого же колеса (10).
18. Способ по любому из пп. 1-17, при котором при обнаружении критической ситуации инициированная посредством способа операция является сигналом тревоги для машиниста.
19. Способ по любому из пп. 1-17, при котором при обнаружении критической ситуации инициированная посредством способа операция является автоматическим оттормаживанием рельсового транспортного средства.
20. Способ по любому из пп. 1-19, при котором исходный сигнал числа оборотов формируют для дальнейшей обработки.
21. Способ по любому из пп. 1-20, при котором предусмотрена возможность комбинирования способа с другими существующими способами для выявления схода с рельс.
22. Устройство управления для осуществления способа по любому из пп. 1-21, которое установлено в рельсовом транспортном средстве.
23. Устройство управления по п. 22, содержащее интерфейсы для инициирования операции в рельсовом транспортном средстве.
| DE 102011001978 A1, 18.10.2012 | |||
| DE 19835041 C1, 05.08.1999 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| DE 102014108685 A1, 24.12.2015 | |||
| DE 602004008735 T2, 12.06.2008 | |||
| DE 102013105397 A1, 27.11.2014 | |||
| EP 1236633 A2, 04.09.2002. | |||

