Изобретение относится к измерительной технике и представляет собой измерительное устройство, позволяющее произвести анализ серии образцов. Основная проблема, решаемая настоящим изобретением, - автоматическое управление позиционированием образцов, результатом которого является установка требуемого образца в местоположение, служащее для измерения свойств образца - местоположение измерения. Данная проблема включает в себя следующие задачи: 1) кинематическое обеспечение возможности позиционирования образцов, 2) получение информации о начальной позиции образцов, 3) управление двигателем в составе кинематической схемы позиционирования образцов, 4) получение данных, подтверждающих завершение позиционирования, т.е. установку требуемого образца в местоположение измерения.
ПРИНЯТАЯ ТЕРМИНОЛОГИЯ
В настоящем описании для обозначения различных процессов, деталей и блоков устройства приняты названия, наиболее близко соответствующие их функциональному назначению с учетом принятой терминологии в современной технической литературе. Однако для исключения неоднозначности применяемых терминологических обозначений вследствие соответствия одному термину нескольких значений и для детализации значения принятых терминологических обозначений применительно к конкретному виду устройств, излагаемых в настоящем описании, приводятся их определения:
- носитель образцов - подложка, например, диск, пластина или лента, на которой закреплены образцы;
- информационный носитель - подложка, которая содержит одну или несколько информационных дорожек;
- информационная дорожка - физический носитель информации, считывание данных с которого происходит при его движении относительно датчика;
- контроллер двигателя - электронная схема, формирующая электрический сигнал управления двигателем;
- контроллер позиционирования - программно-аппаратный комплекс, выполняющий обработку сигналов с датчиков информационных дорожек и управление контроллером двигателя;
- позиционирование - установка в требуемое местоположение;
- местоположение измерения - местоположение, служащее для измерения свойств образца, например, оптическим или другими методами;
- синхросигнал - сигнал, полученный с датчиков, считывающих информационные дорожки;
- аналитический сигнал - сигнал, несущий информацию об интенсивности измеряемой величины, например, в случае оптического анализа - сигнал фотоответа от анализируемого образца;
- полезный аналитический сигнал - электрический сигнал, напряжение которого соответствует величине интенсивности измеряемой величины;
- АЦП - аналого-цифровой преобразователь;
- ПЗУ - цифровое постоянное запоминающее устройство;
- ППЗУ - перезаписываемое ПЗУ.
УРОВЕНЬ ТЕХНИКИ
Известен принцип кинематической схемы позиционирования образцов, согласно которому образцы устанавливаются на общем носителе, и таким образом вышеупомянутая задача 1) сводится к позиционированию носителя образцов. Нижеперечисленные изобретения, включая настоящее, используют этот принцип. Возможны различные варианты расположения образцов на носителе, объединенные общим свойством: кинематическая схема привода способна изменять координату носителя образцов вдоль линии расположения образцов, которая может лежать на прямой, что реализовано в изобретениях [3], [4], либо линия расположения образцов может являться окружностью, что реализовано в изобретениях [1], [2].
Одной из основных целей изобретения [1] «Измерительное устройство с блоком автоматической смены образцов» является обеспечение возможности замены блока в составе измерительной установки, производящего позиционирование образцов, для чего неотъемлемой деталью измерительного устройства и существенным признаком изобретения является разъем, обеспечивающий стыковку электрических сигналов с основной частью устройства. Причем замена блока позиционирования образцов на блок другого типа (например, с другим количеством образцов) не требует ручного ввода данных (о расположении образцов на носителе) в блок управления двигателем, который находится в составе основной части установки; эта задача соответствует вышеописанной задаче 3) управления двигателем и решается путем хранения в ПЗУ цифровых данных о координатах расположения анализируемых образцов. ПЗУ находится в составе блока позиционирования образцов и также является существенным признаком изобретения. Таким образом, через разъем в блок позиционирования передается сигнал управления двигателем, а в основную часть установки передаются данные от ПЗУ, которые, например, могут содержать количество шагов, которое необходимо выполнить шаговому двигателю для установки того или иного образца. Носитель образцов может являться, например, диском или пластиной. В первом случае образцы расположены по окружности, а позиционирование осуществляется путем поворота диска на заданный угол вокруг оси, проходящей через центр этой окружности.
Данное изобретение имеет ряд общих с настоящим изобретением целей и выбрано в качестве прототипа, который, однако, имеет следующие недостатки:
1. Неоправданно сложное обеспечение универсальности устройства. Универсальность основной части измерительного устройства, трактуемая как возможность замены блока позиционирования образцов на блок другого типа, обеспечивается включением ПЗУ в состав данного блока, а также всей кинематической схемы позиционирования, включая двигатель.
2. Отсутствуют средства определения «стартового» положения носителя образцов, например, по принципу, примененному в спектрофотометре, конструкция которого описана в изобретении [2], где вышеупомянутая задача 2) получения информации о начальной позиции образцов решается при помощи оптопары, сигнал с которой, при установлении носителя образцов - диска («образцами» условно названы светофильтры, установленные на диске) в «стартовое» положение, изменяет уровень выходного сигнала. В прототипе же [1] задача 2) получения информации о начальной позиции образцов решается косвенно при помощи реализации варианта кинематической схемы привода носителя образцов, которая имеет механический стопор, обеспечивающий остановку носителя образцов в «стартовом» положении. При таком принципе установки носителя образцов в «стартовое» положение возможно появление погрешности, связанной с рассогласованием позиции механического стопора со «стартовой» позицией носителя образцов. Данная погрешность может прогрессировать в процессе эксплуатации устройства вследствие механического износа стопора, контактирующей с ним поверхности и редуктора в составе привода носителя образцов. Механический износ будет тем больше, чем больше передаточное число редуктора, т.к. усилие на стопор и механику редуктора будет также возрастать с возрастанием передаточного числа. Однако для обеспечения достаточной точности позиционирования необходимо применение редуктора с соответствующим передаточным числом, которое будет тем больше, чем большее количество образцов установлено на носителе образцов.
3. При выполнении позиционирования образцов отсутствует обратная связь с электронной схемой управления двигателем, вследствие чего вышеупомянутая задача 4) получения информации о завершении позиционирования решается косвенно: позиционирование считается выполненным при завершении передачи пакета импульсов управления на шаговый двигатель, что обуславливает необходимость в повышенной точности механики блока позиционирования, как то: отсутствие люфтов механики двигателя и редуктора, точная установка образцов, точное соответствие значения, хранящегося в ПЗУ, фактическому числу шагов, необходимому для позиционирования. Невыполнение перечисленных требований будет приводить к появлению погрешности позиционирования. Необходимостью также является применение двигателя, обеспечивающего поворот ротора на заданный угол и фиксацию ротора после поворота, т.е. применение шагового двигателя.
4. Сложность получения и трудоемкость ручного ввода численных данных управления позиционированием в ППЗУ, в случае реализации варианта измерительного устройства, обеспечивающего возможность перезаписи данных в ППЗУ; такой вариант измерительного устройства предусматривают пп.6,7 формулы изобретения [1].
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технический результат от использования настоящего изобретения заключается в обеспечении более надежного, чем в прототипе, управления позиционированием, в обеспечении возможности работы устройства в режиме равномерного движения носителя образцов и в упрощении устройства в целом. Технический результат достигается тем, что данные, необходимые для позиционирования образцов, хранятся в виде оптических, магнитных либо механических меток, расположенных на информационном носителе, который кинематически связан с носителем образцов так, что движение носителя образцов происходит синхронно с движением информационного носителя; при этом метки считываются датчиком, формирующим сигнал, по которому возможно регистрировать моменты входа (выхода) меток в (из) область считывания датчиков. Указанные моменты времени, вследствие синхронности движения носителя образцов и информационного носителя, совпадают с моментами времени входа (выхода) образцов в (из) местоположение измерения. Кинематическая связь информационного носителя с носителем образцов может быть опеспечена расположением меток непосредственно на носителе образцов; в этом случае информационный носитель формально является частью носителя образцов, что показано на фиг.1...4, 8, 10, 12, 14. В случае выполнения отдельного информационного носителя кинематическая связь может быть обеспечена, например, жесткой посадкой диска носителя образцов и диска информационного носителя на одну ось либо зубчатой передачей от носителя образцов к информационному носителю.
На фиг.1 представлена блок-схема измерительного устройства на примере реализации спектрофотометра.
Аналитическая часть устройства функционирует следующим образом: блок питания 15 подает напряжение на источник света 16, оптическая схема 17 направляет пучок света на один из образцов, находящийся в местоположении измерения; на чертеже в местоположении измерения находится образец 21. Сигнал оптического ответа образца поступает в фотоприемник 18, а с него - в монохроматор 19; настройка длины волны монохроматора осуществляется с помощью двигателя 50; управляющее напряжение для двигателя 50 формирует контроллер двигателя 51. Преобразование оптического сигнала в электрическую форму производится с помощью фотодетектора 52. Далее аналитический сигнал поступает на электрическую схему 53, которая усиливает сигнал с фотодетектора и выделяет полезный аналитический сигнал, который оцифровывается аналого-цифровым преобразователем 54. Цифровая форма полезного аналитического сигнала поступает на устройство сопряжения 58 с персональным компьютером 59. Устройство сопряжения 58 также служит для формирования сигнала, поступающего на контроллер двигателя 51, управляющего настройкой длины волны монохроматора. Блок 72 является блоком обработки аналитического сигнала, а блок 73 выполняет функции сбора информации, ее отображения и сохранения, а также предоставляет возможности пользовательского интерфейса при помощи стандартных средств персонального компьютера.
Часть устройства, выполняющая функции позиционирования, состоит из кинематической схемы 70 и электрической схемы управления позиционированием 71. Блок 70 содержит кинематическую схему позиционирования и является одним из вариантов реализации настоящего изобретения при расположении образцов по линии, лежащей на прямой. Соответственно такому расположению образцов выбирается кинематика привода носителя образцов, в данном случае она обеспечивает линейное перемещение носителя образцов с помощью зубчато-реечной передачи 12, приводимой в движение двигателем 11. Носитель образцов 1 содержит информационные дорожки 3 и 4, которые представляют собой физический носитель аналоговых данных, например, магнитную ленту. На информационных дорожках записаны данные о позиции носителя образцов. Данные записаны в виде меток. Возможны различные виды меток и соответствующих им датчиков. Оптические метки, например, щели в непрозрачном материале или штрихи, нанесенные чернилами, возможно считывать оптопарой в качестве датчика. Магнитные метки, например, области намагниченности на магнитной ленте, считываются электромагнитным датчиком. Механические метки могут быть в виде рельефа на поверхности информационной дорожки, выпуклые области которого в результате механической передачи к управляющему стержню датчика приводят к замыканию его электрических контактов.
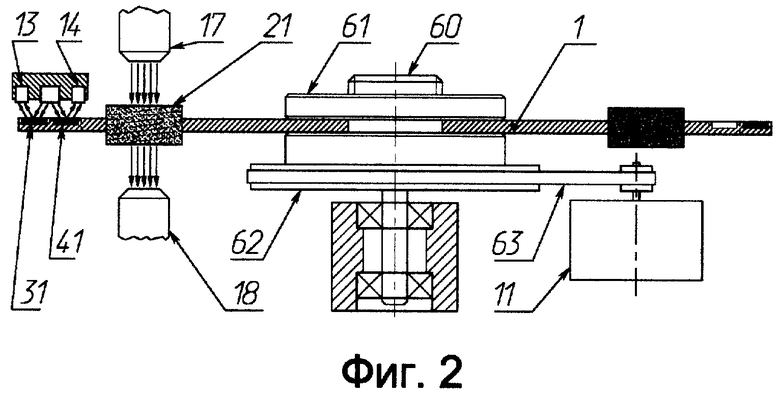
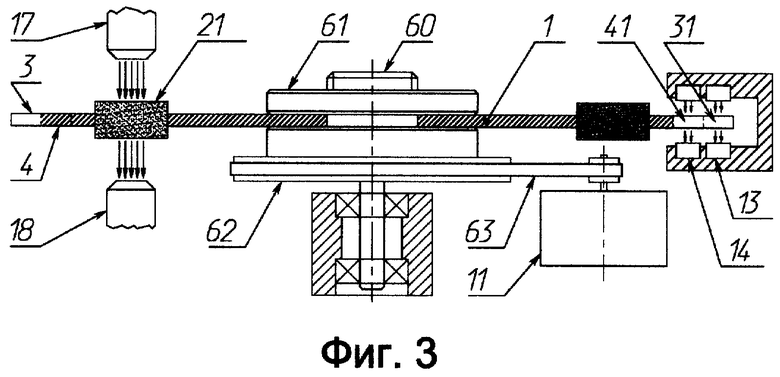
Каждому образцу 21...24 соответствует своя метка 31...34. Метка 41 служит для идентификации «стартового» образца 21. Ширина каждой из меток 31...34 должна соответствовать допустимой величине перемещения образца в пределах местоположения измерения, при которой аналитический сигнал не меняет своего значения. Позиционное соответствие меток образцам выбирается таким, чтобы при установке образца в местоположение измерения соответствующая ему метка попадала в область считывания датчика 13 (или группы датчиков, если информационных дорожек несколько, например, метка 31 - датчик 13, метка 41 - датчик 14). На схеме обозначен сдвиг меток и датчиков относительно образцов на величину shift, что не нарушает выполнения условия позиционного соответствия. Позиционное соответствие меток своим образцам дает возможность на основе анализа синхросигнала 74 с датчика 13 определить факт установки какого-либо образца в местоположение измерения, а также возможность идентификации «стартового» образца 21 путем анализа синхросигнала 75 с датчика 14. При старте устройства необходимо определить текущую позицию носителя образцов 1, что выполняется путем перемещения носителя образцов до идентификации «стартового» образца 21, для чего контроллер позиционирования 56 задает нужное направление и скорость движения контроллеру двигателя 57, который подает управляющее напряжение на двигатель 11; процесс происходит до момента совмещения метки 41, идентифицирующей «стартовый» образец 21, с областью считывания датчика 14, в результате чего синхросигнал 75 принимает значение, индицирующее факт нахождения «стартового» образца 21 в местоположении измерения. Последующая установка любого требуемого образца выполняется путем отсчета количества циклов чередования значений синхросигнала 74, соответствующих меткам и пустым областям на информационной дорожке 3. На фиг.2 представлена фронтальная проекция варианта исполнения кинематической схемы блока позиционирования при расположении образцов по окружности. Носитель образцов 1 выполнен в форме диска, который зажимается в шпинделе 60 с помощью гайки 61, чем обеспечивается возможность смены носителя образцов 1. Вертикальная проекция данного носителя образцов представлена на фиг.4. Функции редуктора выполняет ременная передача (фиг.2), передающая крутящий момент от шкива мотора 11 к шкиву 62 посредством пассика 63. На фиг.2 образец 21 установлен в местоположении измерения. Метки 31 и 41 соответствуют образцу 21 и считываются оптопарами 13 и 14, работающими на отражение. Для обеспечения позиционного соответствия метки могут лежать каждая со своим образцом в одном секторе (фиг.4), однако метки могут быть смещены относительно образцов вместе с датчиками; например, для носителя образцов, представленного на фиг.3, метки вместе с датчиками смещены на угол 180°. На фиг.3 представлен вариант информационных дорожек, содержащих щели, которые выполняют функции меток, соответственно этому выбран вариант оптопар, работающих на прохождение света; образец 21 находится в местоположении измерения, ему соответствуют метка 31, служащая для регистрации установки образца 21 в местоположение измерения, и метка 41, служащая для идентификации «стартового» образца 21.
Вследствие наличия информационных дорожек носитель образцов не нуждается в дополнительном информационном обеспечении данными о координатах расположения на нем образцов, хранящимися, например, в ПЗУ, примененному в прототипе, что значительно упрощает устройство. Следствием этого является возможность замены носителя образцов без какого-либо дополнительного информационного обеспечения контроллера позиционирования данными о расположении на нем образцов. Таким образом обеспечивается универсальность измерительного устройства, т.е. возможность работы с различными типами носителей образцов. В отличие от прототипа, в конструкции которого сменным элементом является блок, включающий все составляющие, указанные выше в п.1 перечисления недостатков, в конструкции, предлагаемой настоящим изобретением сменным элементом является лишь одна его деталь - носитель образцов, что упрощает конструкцию измерительного устройства. Также упрощается процесс эксплуатации измерительной установки и появляется возможность проведения анализа серии образцов путем последовательной смены носителей образцов с заранее установленными на них образцами. Кроме того, появляется возможность нетрудоемкого ручного нанесения меток 31, 32...315, 316, 41, соответствующих местоположению образцов (фиг.4). Таким образом, данное изобретение имеет более простое решение задачи, обозначенной в п.4 перечисления недостатков прототипа.
Необходимые для управления позиционированием данные передаются контроллеру позиционирования 56 посредством синхросигнала 74, несущего информацию о текущей позиции носителя образцов. Этим достигается отслеживание контроллером позиционирования 56 текущей позиции носителя образцов 1. При этом синхросигнал 74 является обратной связью непосредственно от носителя образцов, что обеспечивает надежность позиционирования, т.к. контроллер позиционирования 56 получает информацию о завершении позиционирования при установке требуемого образца в местоположение измерения.
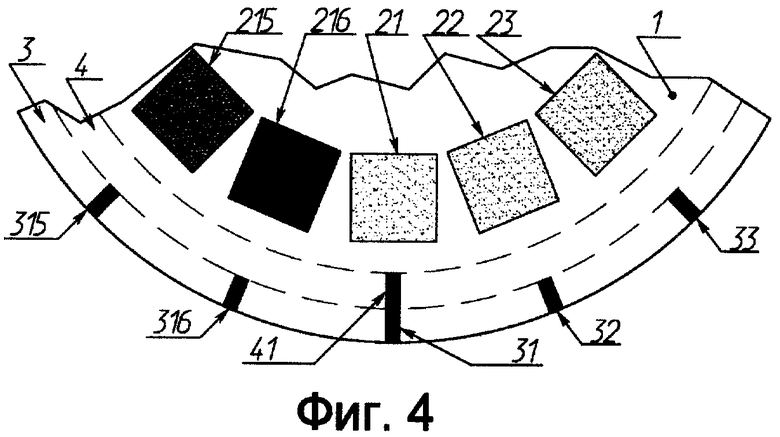
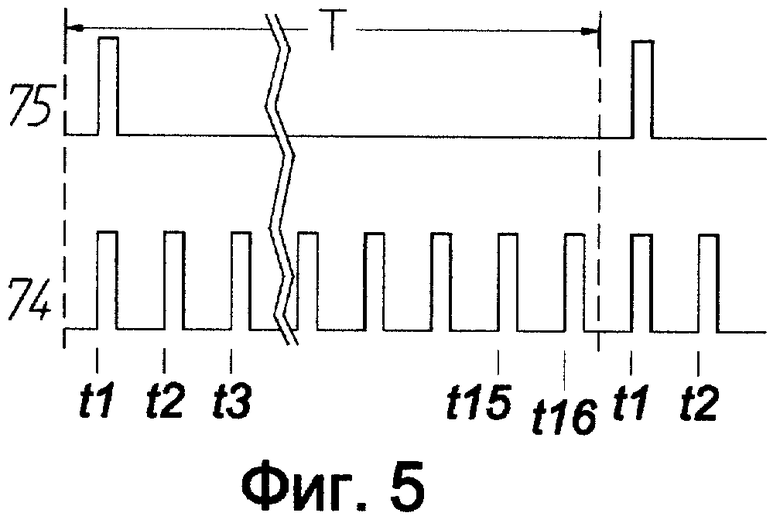
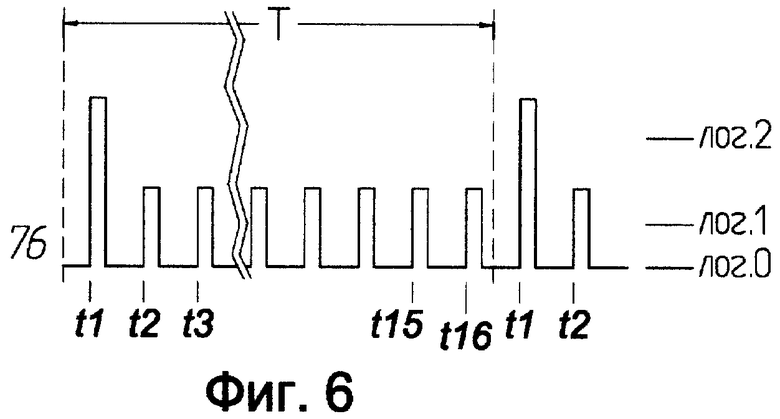
Кроме передачи информации о смене позиции носителя образцов на величину, определяемую шириной меток и расстоянием между метками на информационной дорожке 3, необходимо идентифицировать как минимум одну «стартовую» позицию носителя образцов, что соответствует вышеупомянутой задаче 2) получения информации о начальной позиции образцов. Решение этой задачи может быть реализовано двумя способами. Первый способ идентификации стартовой позиции носителя образцов состоит в следующем: одна из дорожек должна содержать только одну метку, соответствующую «стартовому» образцу. При установке «стартового» образца в местоположение измерения датчик, считывающий метки с данной дорожки, будет формировать значение синхросигнала, индицирующее факт завершения позиционирования «стартового» образца. Возможны варианты идентификации нескольких образцов, для этого необходимо за каждым идентифицируемым образцом закрепить информационные дорожки, содержащие по одной метке. На фиг.4 представлен вариант носителя образцов для кинематической схемы позиционирования на фиг.2. На носителе образцов 1, выполненном в виде диска, закреплены образцы 21, 22...215, 216. Каждому образцу соответствует своя метка 31, 32...315, 316, расположенная на дорожке 3. Дорожка 4 содержит всего одну метку 41, служащую для идентификации «стартового» образца 21. Осциллограммы синхросигналов 74, 75, полученные с датчиков 13, 14 в режиме равномерного вращения носителя образцов, представлены на фиг.5. Моменты времени t1, t2...t15, t16 соответствуют моментам совмещения края метки 31, 32...315, 316 с областью считывания датчика. Высокий логический уровень синхросигнала является откликом датчика на попадание метки в область считывания. На фиг.6 представлена осциллограмма синхросигнала 76, полученного путем аналогового суммирования синхросигналов 74, 75. Использование такого варианта формирования обеспечивает передачу синхросигнала контроллеру позиционирования 56 одним проводом без каких-либо потерь информации, необходимой для управления позиционированием.
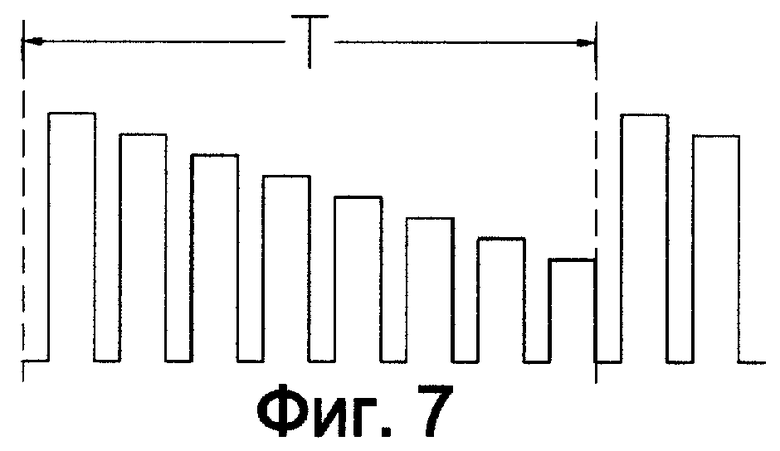
Получение синхросигнала 76 возможно также и при использовании лишь одного датчика, считывающего одну информационную дорожку, если метки на данной дорожке обеспечивают хранение аналоговых данных, а датчик и электрическая схема обработки сигнала с датчика обеспечивают формирование синхросигнала с несколькими логическими уровнями. На фиг.6 синхросигнал имеет 3 логических уровня. Реализация хранения аналоговых данных на информационной дорожке возможна, например, с помощью варьирования оптической плотности меток. При этом возможно формирование синхросигнала, обеспечивающего идентификацию всех образцов, например, на фиг.7 представлена осциллограмма синхросигнала, идентифицирующего 8 образцов.
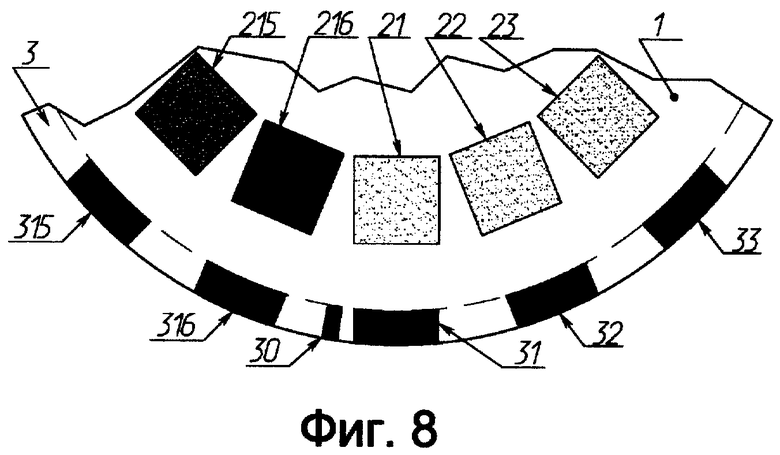
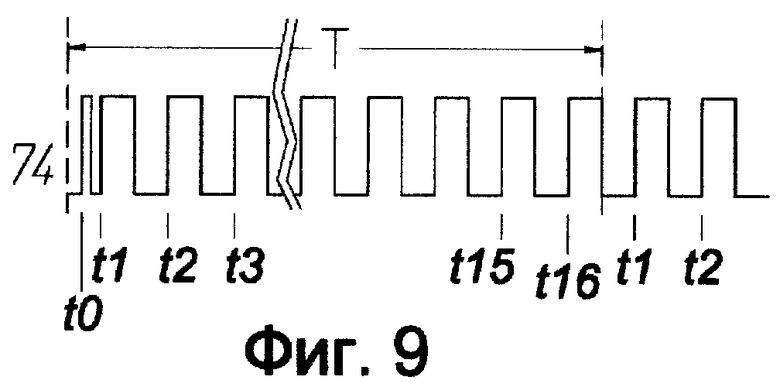
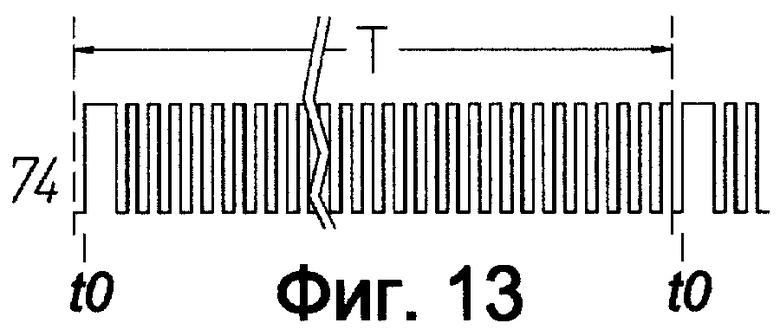
Второй способ идентификации стартовой позиции носителя образцов состоит в следующем: одна из меток (фиг.8, поз.30) должна иметь ширину, отличную от других, что в режиме непрерывного вращения носителя образцов приведет к формированию импульса синхросигнала уникальной длительности (фиг.9, поз.t0) с соответствующего данной дорожке датчика. «Стартовой» позиции носителя образцов должен соответствовать импульс, отличающийся от других импульсов уникальной длительностью, где за импульс принимается одно состояние синхросигнала с датчика, не меняющееся в течение некоторого времени при условии непрерывного вращения носителя образцов с заданной скоростью. Возможны варианты идентификации нескольких образцов, для этого необходимо за каждым идентифицируемым образцом закрепить уникальную длительность импульса синхросигнала.
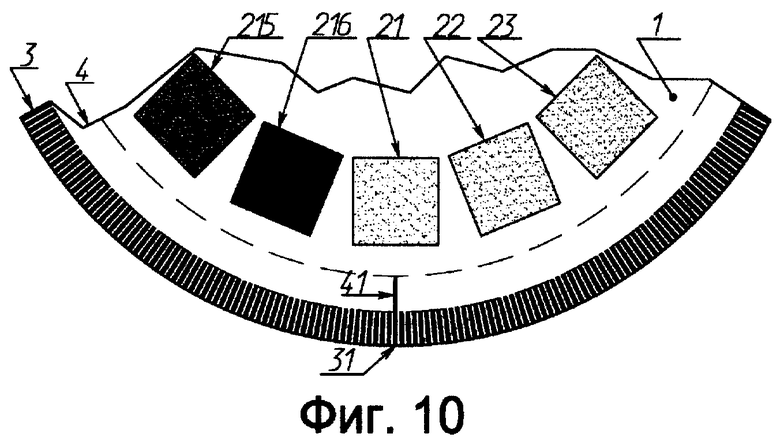
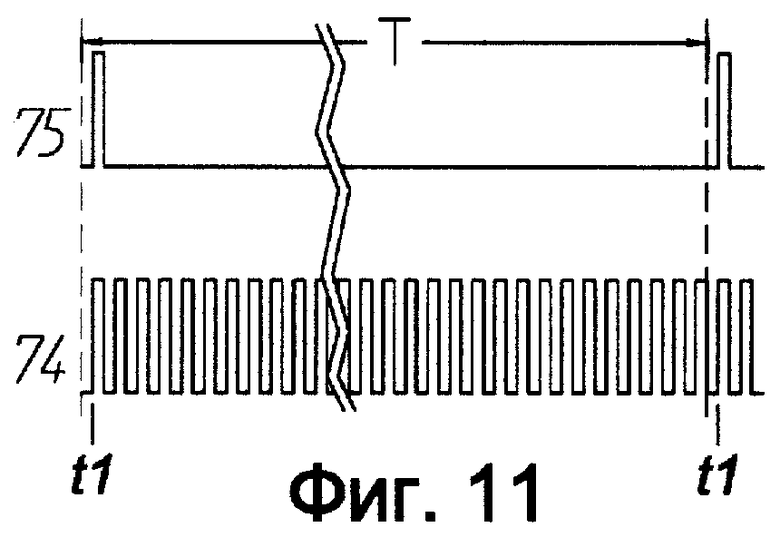
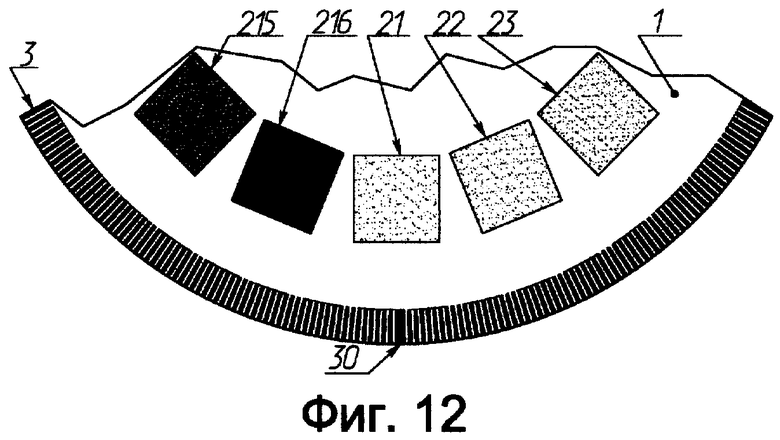
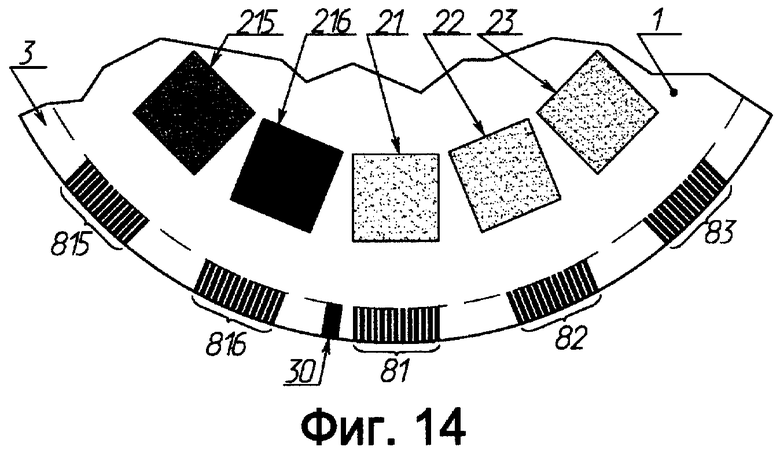
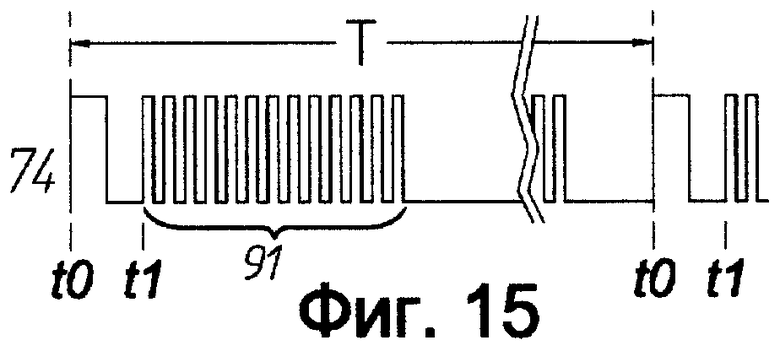
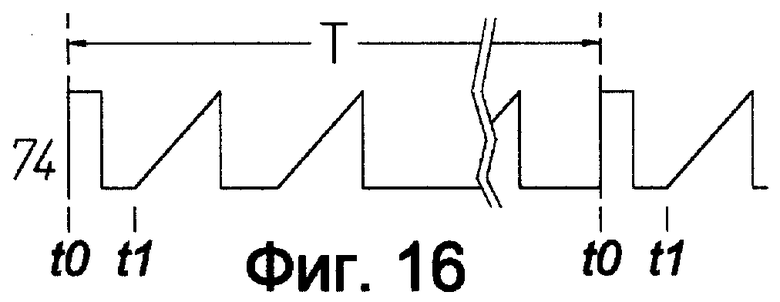
Кроме вышеописанных возможны варианты различных структур меток на информационных дорожках, обеспечивающих определение угловой или линейной координаты носителя образцов с точностью, определяемой шириной меток и расстоянием между метками. На фиг.10 представлен вариант носителя образцов, в котором идентификация «стартовой» координаты осуществляется аналогично вышеописанному варианту носителя образцов, представленному на фиг.4, при помощи дорожки, содержащей одну метку; соответствующие данному варианту осциллограммы синхросигналов представлены на фиг.11. На фиг.12 представлен вариант носителя образцов, в котором идентификация «стартовой» координаты осуществляется аналогично вышеописанному варианту носителя образцов, представленному на фиг.8, при помощи метки 30, имеющей уникальную ширину; соответствующая данному варианту осциллограмма синхросигнала представлена на фиг.13. Также возможны смешанные типы кодирования позиции образцов. Например, обеспечение возможности уточненной установки образца в местоположение измерения возможно выполнить при соответствии каждому образцу группы меток (фиг.14 - поз.81, 82...815, 816). Группа импульсов 91 на фиг.15 соответствует группе меток фиг.14, поз.81. Кроме импульсного кодирования возможно использовать аналоговый синхросигнал для уточненной установки образца в местоположение измерения. На фиг.16 представлена осциллограмма синхросигнала, который можно получить, например, с оптопары, считывающей информационную дорожку, аналогичную представленной на фиг.14, но вместо групп меток 81, 82...815, 816 содержащую метки с плавно меняющейся оптической плотностью от одного края метки к другому по направлению движения носителя образцов.
Формула изобретения охватывает описанные варианты, альтернативные варианты, упомянутые выше, а также все эквивалентные варианты.
ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
фиг.1 - оптико-электрическая блок-схема измерительного устройства на примере оптической схемы спектрофотометра;
фиг.2 - оптико-кинематическая схема блока позиционирования;
фиг.3 - оптико-кинематическая схема блока позиционирования (вариант);
фиг.4 - дисковый носитель образцов с идентификацией одного из образцов меткой 41 на отдельной информационной дорожке 4;
фиг.5 - осциллограммы сигналов с датчиков, считывающих информационные дорожки 3, 4 на фиг.4;
фиг.6 - осциллограмма сигнала 76, полученного аналоговым суммированием сигналов 74, 75 на фиг.5;
фиг.7 - осциллограмма сигнала амплитудно-импульсной модуляции, идентифицирующего 8 образцов;
фиг.8 - дисковый носитель образцов с идентификацией одного из образцов меткой 30 уникальной ширины;
фиг.9 - осциллограмма сигнала с датчика, считывающего информационную дорожку на фиг.9;
фиг.10 - дисковый носитель образцов с идентификацией одной координаты меткой 41 на отдельной информационной дорожке 4;
фиг.11 - осциллограммы сигналов с датчиков, считывающих информационные дорожки 3, 4 на фиг.10;
фиг.12 - дисковый носитель образцов с идентификацией одной координаты меткой 30 уникальной ширины;
фиг.13 - осциллограмма сигнала с датчика, считывающего информационную дорожку на фиг.12;
фиг.14 - дисковый носитель образцов с соответствием каждому образцу группы меток;
фиг.15 - осциллограмма сигнала с датчика, считывающего информационную дорожку на фиг.14;
фиг.16 - осциллограмма сигнала с пилообразными врезками;
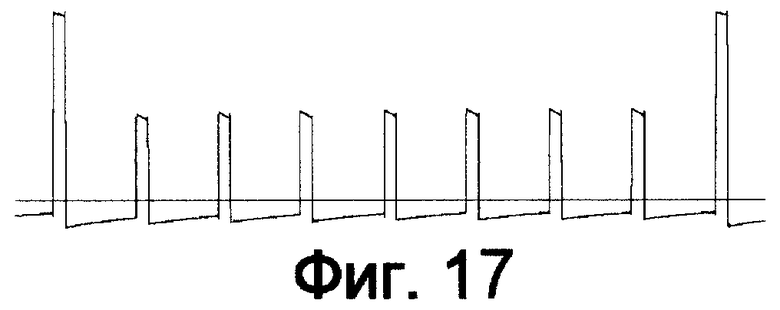
фиг.17 - осциллограмма синхросигнала, полученного аналоговым суммированием сигналов с оптопар опытной измерительной установки;
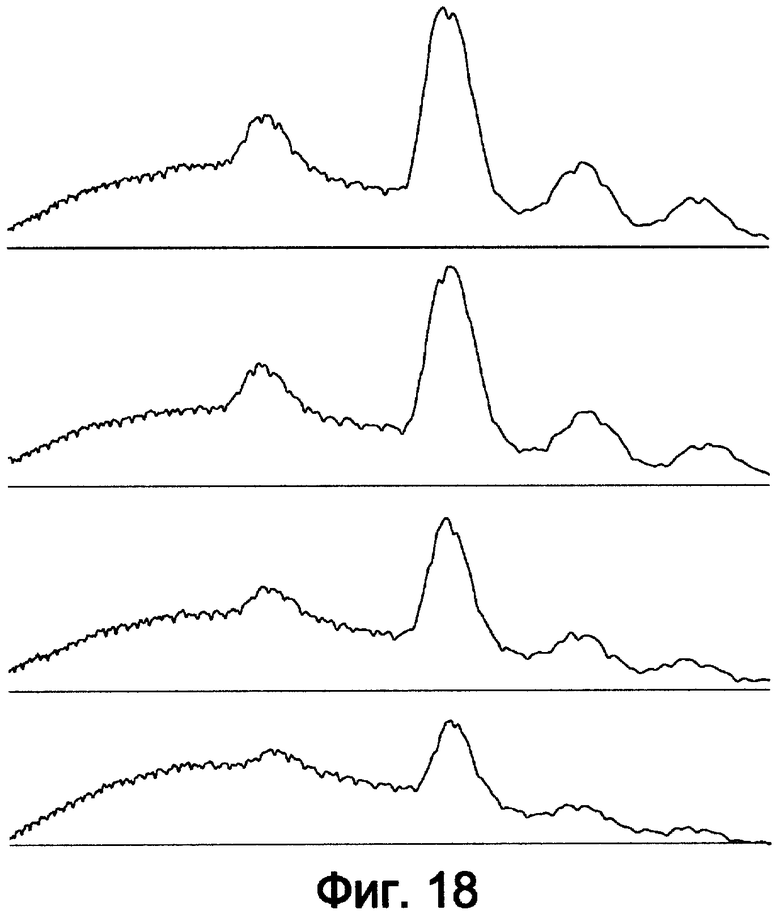
фиг.18 - спектры люминесценции ряда образцов, полученные на опытной измерительной установке.
СВЕДЕНИЯ, ПОДТВЕРЖДАЮЩИЕ ВОЗМОЖНОСТЬ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Согласно принципу, изложенному в настоящем описании, была модернизирована измерительная установка, представляющая собой флюориметр, служащий для получения спектра люминесценции анализируемых образцов. Носитель образцов был выполнен в виде диска, позволял устанавливать до 8 образцов и содержал две информационные дорожки с метками в виде щелей; считывание производилось двумя оптопарами, работающими на прохождение света. Было опробовано два варианта работы устройства: при непрерывном равномерном вращении носителя образцов и в шаговом режиме.
Для работы в режиме равномерного вращения носителя образцов в качестве привода кинематической схемы использовался синхронный бесколлекторный двигатель. Сигналы с оптопар суммировались, полученный синхросигнал оцифровывался АЦП, данные с которого передавались персональному компьютеру. Аналогично оцифровывался полезный аналитический сигнал. Осциллограмма синхросигнала представлена на фиг.17. Программный модуль анализировал цифровую форму синхросигнала, вычислял номер образца, находящегося в текущий момент времени в местоположении измерения, управлял аналого-цифровым преобразователем, запуская процесс интегрирования по времени полезного аналитического сигнала в момент входа образца в местоположение измерения и считывая данные АЦП в момент выхода образца из местоположения измерения.
Для работы в шаговом режиме в качестве привода кинематической схемы использовался шаговый двигатель. Работа устройства происходила по следующей схеме:
1. установка требуемой длины волны монохроматора;
2. установка требуемого образца в местоположение измерения;
3. запуск интегрирования по времени полезного аналитического сигнала;
4. считывание данных АЦП по прошествии заданного времени интегрирования;
5. переход к п.2 для позиционирования следующего образца или, после анализа последнего образца, переход к п.6;
6. переход к п.1, если не достигнут конечный предел заданного диапазона длин волн;
7. завершение процесса.
На опытной измерительной установке были сняты спектральные характеристики люминесценции ряда образцов, содержащих редкоземельные элементы. В качестве примера на фиг.18 представлена группа спектров люминесценции образцов, выполненных из висмутатно-боратного стекла по методике [5]. Образцы были легированы тербием в различных концентрациях. Длины волн четырех пиков характеризуют элемент, их амплитуда соответствует концентрации тербия в образце.
ЛИТЕРАТУРА
1. United States Patent 6177991, 23.01.2001. «Measuring device with automatic sample changer», МПК7 G01J 3/28
2. United States Patent 4421411, 20.12.1983. «Photometric analyzer», МПКЗ G01J 3/48.
3. PCT WO 2004/104989, 02.12.2004. «NMR measuring system», МПК7 G10R.
4. RU 2080568 C1, 27.05.1997. «Люминесцентный фотометр», МПК6 G01J 1/58, G01N 21/64.
5. RU 2194268 C1, 10.12.2002. «Способ приготовления образцов для люминесцентного определения d-элементов в составе оксидных соединений», МПК7 G01N 21/63.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМОМЕТРИЧЕСКАЯ КОСА И СПОСОБ ЕЕ КАЛИБРОВКИ | 2008 |
|
RU2389984C2 |
| СПОСОБ И СИСТЕМА ЗАПИСИ ОБРАЗЦА СЕРВОСИСТЕМЫ НА НОСИТЕЛЕ ДАННЫХ | 1995 |
|
RU2151431C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КИНЕТИКИ КРИСТАЛЛИЗАЦИИ | 2009 |
|
RU2406080C1 |
| НОСИТЕЛЬ ЗАПИСИ И УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ НОСИТЕЛЯ ЗАПИСИ | 2002 |
|
RU2280907C2 |
| ОПТИЧЕСКИЙ НОСИТЕЛЬ ЗАПИСИ | 1999 |
|
RU2226720C2 |
| МНОГОСЛОЙНЫЙ ОПТИЧЕСКИЙ ДИСК, ИМЕЮЩИЙ ИНФОРМАЦИЮ ДИСКА | 2004 |
|
RU2403629C2 |
| ОПТИЧЕСКИЙ ДИСК И УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ ОПТИЧЕСКОГО ДИСКА | 1999 |
|
RU2242056C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ ОПТИЧЕСКОГО ДИСКА | 1998 |
|
RU2122749C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| СИСТЕМА И СПОСОБ КОДИРОВАНИЯ СЕРВОАДРЕСА | 1995 |
|
RU2139577C1 |
Изобретение относится к измерительной технике. Устройство позволяет произвести анализ серии образцов путем их последовательной установки в местоположение, служащее для анализа свойств образца, например, оптическими методами. Установка образцов осуществляется путем поворота на заданный угол либо путем линейного перемещения носителя образцов, который может быть выполнен, например, в виде пластины или диска. Носитель образцов содержит дорожки, на которые нанесены метки, например, оптические или магнитные. Метки имеют позиционное соответствие образцам. Дорожки считываются датчиками, сигналы с которых служат для определения текущего местоположения носителя образцов. Техническим результатом является повышение точности измерений и упрощение устройства. 8 з.п. ф-лы, 18 ил.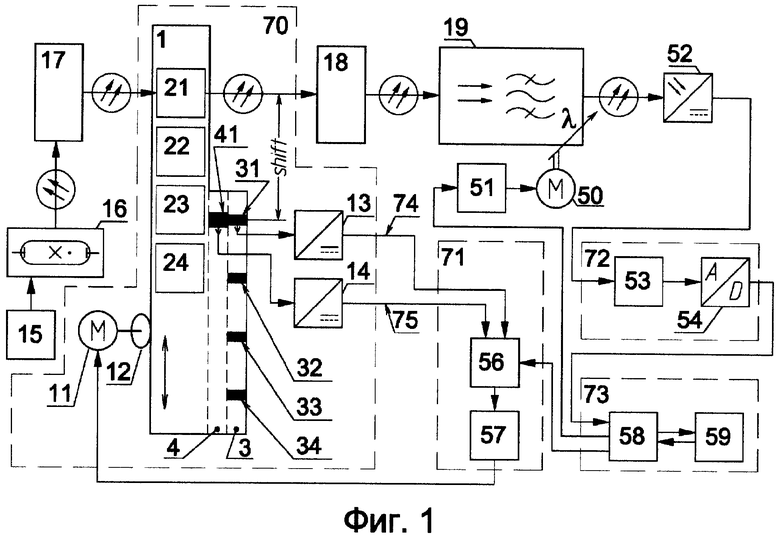
| US 6177991 А, 23.01.2001 | |||
| ЛЮМИНЕСЦЕНТНЫЙ ФОТОМЕТР | 1993 |
|
RU2080568C1 |
| СПОСОБ И СИСТЕМА ЗАПИСИ ОБРАЗЦА СЕРВОСИСТЕМЫ НА НОСИТЕЛЕ ДАННЫХ | 1995 |
|
RU2151431C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ОБРАЗЦОВ ДЛЯ ЛЮМИНЕСЦЕНТНОГО ОПРЕДЕЛЕНИЯ d-ЭЛЕМЕНТОВ В СОСТАВЕ ОКСИДНЫХ СОЕДИНЕНИЙ | 2001 |
|
RU2194268C1 |

