Изобретение относится к термометрии и предназначено для измерения температуры контактным способом одновременно в группе местоположений, по которым может быть проложен измерительный шнур термометрической косы. Изобретение может быть использовано в геофизических изысканиях, в агро- и химической промышленности для измерения распределения температуры по глубине скважины, по поверхности грунта, в объеме газообразных, жидких либо сыпучих сред, по длине трубопровода, в объеме помещения, например, теплицы. Измерение обеспечивается оцифровкой сигналов с группы термодатчиков, расположенных в различных точках по длине измерительного шнура.
ТЕРМИНОЛОГИЧЕСКИЕ ОБОЗНАЧЕНИЯ
-- измерительный шнур - группа термодатчиков, соединенных электрическими проводами в измерительную схему и смонтированных так, что каждый датчик расположен на заданной длине от начала косы, а электрическое подключение проводов к измерительному блоку либо прибору расположено в начале косы;
-- электронный блок - электрическая схема, конструктивно оформленная в корпусе и имеющая, как минимум, разъем для подключения к внешнему устройству, например к отображающему измерительному прибору;
-- термометрическая коса - один или более измерительных шнуров, подключенных к электронному блоку;
-- ПК - персональный компьютер;
-- АЦП - аналого-цифровой преобразователь;
-- ПЗУ - электронное цифровое энергонезависимое (постоянное) запоминающее устройство;
-- ППЗУ - перезаписываемое ПЗУ;
-- ТКС - температурный коэффициент сопротивления [%/°C];
-- динамический диапазон - в данном описании подразумевается абсолютный динамический диапазон, например динамический диапазон сигнала датчика - это приращение сигнала датчика, выраженное в единицах измерения сигнала, например, милливольтах (Umax-Umin), соответствующее изменению измеряемой величины, например температуры, во всем рабочем диапазоне. Вычисление относительного динамического диапазона, выраженного в децибелах, с линейным допущением зависимости сигнала датчика от измеряемой величины возможно по формуле:
D=20lg((Umax-Umin)/U0) [дБ],
где U0 - это минимальная величина напряжения, регистрируемого конкретным оборудованием. В зависимости от требуемого варианта относительного динамического диапазона в качестве U0, например, может быть принята величина напряжения, соответствующего значению младшего разряда АЦП, или в качестве U0 может быть принята величина шума. В последнем случае результатом будет отношение “сигнал/шум”, выраженное в децибелах.
-- цифровая шина - один или более электрических проводов, не считая общего провода и провода для подачи питания (как вариант шины с подачей питания), соединяющих одно или более устройств, способных производить обмен данными посредством такого электрического соединения;
-- контроллер цифровой шины - электронная схема для формирования требуемых уровней электрических сигналов приема/передачи данных по цифровой шине;
-- термосигнал - сигнал, полученный с датчика температуры, аналоговый, напряжение которого соответствует измеряемой температуре, либо цифровой сигнал, несущий численное значение, которое соответствует измеряемой температуре;
-- дискретная функция - имеется в виду вариант представления дискретной функции в виде набора пар термосигнал-температура;
-- калибровка термометрической косы - процедура, включающая определение последовательности расположения датчиков в измерительном шнуре, а также калибровку датчиков;
-- калибровка датчика - процедура определения калибровочных коэффициентов для температурной зависимости термосигнала;
-- калибровочные коэффициенты - ряд численных значений, по которым возможно восстановить температурную зависимость термосигнала как непрерывную функцию.
УРОВЕНЬ ТЕХНИКИ
Известны варианты электрического подключения группы датчиков температуры в гирлянду с целью измерения температуры в различных точках, соответствующих расположению датчиков [1…4]. Часто на практике требуется, чтобы данная гирлянда датчиков с соединительными проводами была гибкой [1, 3]. Такая гирлянда датчиков в литературе из области геофизических изысканий получила наименование - термометрическая коса, или термокоса. Датчики, соединяемые в гирлянду, могут быть аналоговые [1…5] или имеющие цифровой выход [8, 9]. В качестве вторичных преобразователей для аналоговых датчиков применяют стрелочные [4] и цифровые [2] приборы, измеряющие напряжение. Стрелочные приборы требуют линейной характеристики термосигнала, тарировки шкалы прибора либо применения линеаризующих усилителей [5], что в настоящее время ограничивает их применение. Цифровые отображающие приборы, содержащие микроконтроллер, позволяют регистрировать данные измерения и производить математическую обработку термосигнала, оцифрованного с помощью АЦП, с целью вычисления температуры в градусах. К недостаткам схем с аналоговыми датчиками относятся погрешности измерения из-за нелинейности вольт-температурной характеристики термосигнала, серийным разбросом параметров датчиков; погрешности из-за паразитных ЭДС в точках соединений, например соединительных проводов, а также разъемов, взаимным влиянием датчиков, подключенных к общему проводу; потеря точности с увеличением длины соединительных проводов. Недостатком может являться большое количество проводов в термометрической косе, например, в случае применения 4-проводной схемы подключения каждого датчика [4, 5], что приводит к увеличению псевдодиаметра группы проводов в косе и к усложнению процесса ее изготовления. К недостаткам схем с цифровыми датчиками относится ограничение по количеству датчиков, подключенных к цифровой шине [9], по максимальной длине проводов цифровой шины [8] и по времени преобразования температуры в цифровой код [8, 9].
Схема подключения датчиков, рекомендованная ГОСТ 25358-82 [1] наиболее близка к предложенной в настоящем изобретении и выбрана в качестве прототипа.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническим результатом настоящего изобретения является повышение точности измерения, увеличение компактности, упрощение изготовления и эксплуатации, в частности - возможность подключения термометрических кос к общей цифровой шине с целью удаленного обмена данными.
Повышение точности измерения достигается одновременно несколькими элементами принципиального построения термометрической косы:
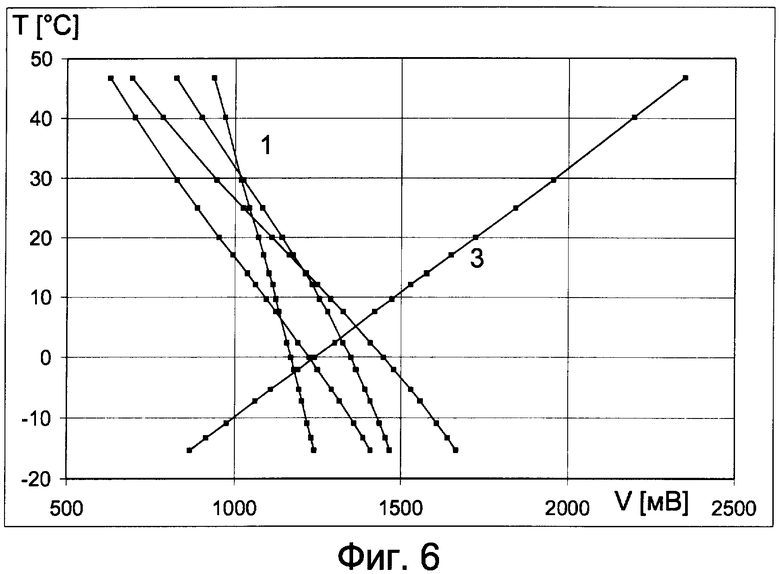
1. Нелинейность и разброс характеристик группы датчиков компенсируются математической обработкой термосигнала с использованием заранее известной зависимости термосигнала от температуры. Данные зависимости, примеры которых представлены на фиг.6, для каждого датчика определяются в процессе калибровки термометрической косы.
2. Цепь прохождения всех аналоговых сигналов построена так, что исключено прохождение тока через аналоговый коммутатор и разъем. В разъеме, через который проходили бы аналоговые сигналы, нет необходимости, поскольку непосредственно в электронном блоке термометрической косы установлен АЦП (фиг.1), и обмен данными с внешним устройством, например с прибором, отображающим результаты измерения на дисплее, производится по цифровой шине приема/передачи посредством микроконтроллера и контроллера цифровой шины. Аналоговый коммутатор, подключая какой-либо вход к аналоговому выходу, переносит лишь ЭДС термосигнала, т.е. лишь потенциал напряжения. При этом ток, проходящий через аналоговый коммутатор, присутствует лишь в момент переключения канала в результате переходного процесса перезаряда суммарных емкости канала коммутатора и емкости входа АЦП. Постоянный же ток, проходящий через коммутатор, ограничивается лишь током утечки, который чрезвычайно мал для внесения ощутимой погрешности в измерение термосигнала, т.к. входное сопротивление АЦП может быть порядка 1000 [МОм], что документировано в [7]. Таким образом сведено к минимуму влияние проходного сопротивления канала аналогового коммутатора, температурный дрейф которого сопоставим с ТКС термистора. Например для мультиплексора ADG508A дрейф равен 0.6 [%/°C] при сопротивлении открытого канала 280 [Ом], что документировано в [6].
Пример: Изменение проходного сопротивления канала аналогового коммутатора при нагреве корпуса микросхемы на 20 [°C] может составить 2 [Ом]. При ТКС термистора 0.4 [%/°C], сопротивлении термистора 1000 [Ом], погрешность, вносимая коммутатором, канал которого включен последовательно с термосопротивлением, оценочно составит:
2[Ом]/(1000[Ом]·0.4[%/°C]/100[%])=0.5[°C].
При меньших значениях термосопротивления и ТКС, характерных для металлических термосопротивлений, погрешность будет большей.
3. Поскольку все датчики постоянно включены в измерительную цепь, то при переключении канала аналогового коммутатора не происходит подключения или отключения датчиков от питающего напряжения. Таким образом, датчики находятся в установившемся электрическом и тепловом режиме, что исключает погрешность измерения, которая может быть вызвана, например, изменением температуры чувствительного элемента датчика, например, полупроводникового кристалла термистора или кристалла интегральной микросхемы в результате подачи на датчик напряжения питания или тока измерительной цепи.
4. Поскольку термосигналы коммутируются напрямую к АЦП, то цепь прохождения аналоговых сигналов не содержит активных элементов для аналоговой обработки термосигнала. В частности схема не содержит усилителя сигналов с датчиков, который мог бы внести дополнительную погрешность, например, связанную с дрейфом нуля операционного либо инструментального усилителя.
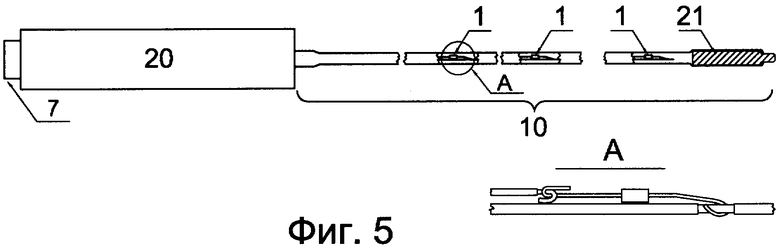
5. Отсутствие разъема в цепи прохождения аналоговых сигналов исключает возможные девиации сопротивлений контактов, а также возможные паразитные сопротивления, например, при образовании конденсата воды в виде росы, образующей резистивную поверхность на диэлектрическом материале разъема. Кроме перечисленного появляется возможность полной герметизации как элементов аналоговой цепи, так и всех элементов электронной схемы за исключением разъема подключения термометрической косы к цифровой шине. Герметизация электронного блока может быть выполнена заполнением корпуса заливочным компаундом, а герметизация измерительного шнура использованием герметичной трубки в качестве оболочки для шнура, в частности - термоусадочной, и ее герметизацией по концам, например, при помощи легкоплавкого полимера (термоклея) или полимеризующегося герметика. Герметизация измерительного шнура также возможна путем экструзионного нанесения полимерного материала, например полимеризующегося герметика, на провода с датчиками с целью получения монолитной структуры. Для защиты измерительного шнура от механических повреждений целесообразно дополнительно обрамить его оболочку металлическим либо полимерным гибким рукавом в виде гофрированной трубки, проволочной оплетки либо проволочной или ленточной спирали. Поскольку все провода и датчики находятся в единой оболочке, то измерительный шнур становится более компактным по сравнению со шнуром, выполненным из отдельных проводов в собственной оболочке, идущих от каждого датчика. Измерительный шнур меньшего сечения может быть проложен, например, внутри обсадочной трубы термометрической скважины меньшего диаметра, что снижает стоимость последней. Вариант конструктивного исполнения термометрической косы представлен на фиг.5. Шпилька 21 служит для крепления съемного груза на конце косы с целью погружения косы в термоскважину под собственным весом.
6. Цепь прохождения аналоговых сигналов не содержит точек соединения, в которых может возникнуть паразитная ЭДС непредсказуемой величины, которую было бы невозможно скомпенсировать. Как правило, паразитной является ЭДС, которая возникает в точках соединения контактов разъема и в точках подпайки проводов и прочих элементов электрической цепи. Природа такой ЭДС - эффект термопары, возникающей в точках соединения проводников из материалов, отличающихся по составу. В данном случае такими материалами могут быть припой и медный провод. В идеальном случае ЭДС термопары может быть скомпенсирована такой же ЭДС противоположной полярности от другой термопары в этой же точке соединения. Например при подпайке медного провода к медной контактной площадке на печатной плате образуется структура “медь-припой-медь”. В такой структуре возникают две ЭДС противоположной полярности, которые полностью скомпенсируются, если химические составы и кристаллическая структура материала медного провода и медной контактной площадки идентичны. Аналогичная термоЭДС возникает в местах пайки выводов микросхем к контактным площадкам на печатной плате с образованием структуры “сталь-припой-медь”. В последнем случае суммарное значение ЭДС намного больше [4, 5]. Также значительное значение термоЭДС возникает в точках пайки проводов к контактам разъема, выполненных, например, из серебреной либо золоченой латуни. Причиной изменения химического состава и структуры материала контактов разъема также может служить их износ, что приведет к дополнительному изменению термоЭДС.
Пример: изменение паразитной ЭДС при нагреве на 20 [°C] точки пайки припоем ПОС-61 медного провода к стальному луженому выводу микросхемы либо контакта разъема может составить 500 [мкВ]; при динамическом диапазоне термосигнала, равном 250 [мВ], соответствующем диапазону измеряемых температур -50…+50 [°C], погрешность, вносимая данной паразитной ЭДС, составит:
(500[мкВ]/1000)[мВ]/250[мВ]·(50-(-50))[°C]=0.2[°C].
Поскольку в реальных условиях эксплуатации термометрической косы нет возможности термостатировать корпус электронного блока, то необходимо скомпенсировать влияние термоЭДС путем включения непосредственно в аналоговую измерительную цепь специальных термочувствительных элементов [4, 5] либо скомпенсировать влияние термоЭДС математической обработкой цифровых данных измерений термосигнала, заранее имея информацию о величинах паразитных термоЭДС.
В настоящем изобретении проблема влияния паразитных ЭДС решается путем калибровки термометрической косы, в процессе которой учитывается суммарное влияние всех элементов аналоговой цепи, как ЭДС, так и сопротивлений, например, сопротивлений соединительных проводов. Цель калибровки - получение в цифровом формате температурных зависимостей термосигналов с каждого датчика, а также при необходимости, - получение дополнительных температурных зависимостей термосигналов от температуры электронного блока. Для измерения температуры электронного блока в нем устанавливают дополнительный аналоговый либо цифровой датчик температуры, который подключают к АЦП либо к микроконтроллеру термометрической косы. Таким образом, появляется возможность скомпенсировать влияние паразитных ЭДС математической обработкой цифровых данных измерений при помощи микроконтроллера в электронном блоке термометрической косы либо средствами внешнего устройства, к которому подключена коса.
7. Предусмотрена возможность обнаружения градиента температуры в объеме корпуса электронного блока. Неравномерность температуры в электронном блоке вносит дополнительную погрешность измерения. Наличие градиента температуры свидетельствует о происходящем процессе неравномерного нагрева или охлаждения корпуса электронного блока, что приведет к изменению характеристик микросхем, оперирующих с аналоговыми сигналами. В таком случае необходимо выдержать электронный блок до установления теплового режима и выполнить автокалибровку АЦП по напряжению. Для обнаружения градиента температуры целесообразно установить в различных местоположениях электронного блока несколько датчиков температуры.
8. Номинал и ТКС терморезистора или чувствительность интегрального датчика выбраны обеспечивающими максимальное значение отношения “сигнал/шум”. Как отмечено выше, данное отношение зависит от абсолютного значения динамического диапазона термосигнала. Оптимальной является величина динамического диапазона аналогового термосигнала, сопоставимая с диапазоном входного напряжения АЦП, который, как правило, равен напряжению питания АЦП. Для исключения возможных искажений сигнала аналоговым коммутатором целесообразно дополнительно ограничить диапазон аналогового термосигнала. Например при напряжении питания АЦП, равном 5 [В], оптимальным диапазоном термосигнала будет интервал от 1 до 4 [В]. В схеме полумоста резистивного делителя (фиг.1) из термосопротивления 1 и постоянного резистора 5 диапазон термосигнала будет зависеть от величины эталонного напряжения Uref, номинала резисторов и ТКС терморезистора. Минимальное значение сопротивления терморезистора ограничено током потребления питания, максимальным током источника эталонного напряжения, мощностью, выделяемой на датчике в виде тепла, а также сопротивлением соединительных проводов, которое обуславливает величину взаимного влияния датчиков, подключенных к общему проводу в измерительном шнуре. Максимальное значение сопротивления терморезистора ограничено сопротивлением изоляции, входным сопротивлением аналогового коммутатора и АЦП, а также величиной паразитных наводок на провода в измерительном шнуре. Для измерительного шнура длиной от 10 до 50 м с диапазоном рабочих температур от минус 50 до 50 [°C] оптимальным является сопротивление терморезистора от 1 до 50 [кОм] или чувствительность интегрального датчика от 2.5 до 20 [мВ/°C].
9. Поскольку одно и то же эталонное напряжение используется в качестве опорного для АЦП и для питания полумостов резистивных делителей из терморезисторов 1 и постоянных сопротивлений 5, то схема мало чувствительна к девиациям эталонного напряжения.
10. Для подавления паразитных наводок на аналоговую цепь применяется АЦП интегрирующего типа и/или интегрирующий каскад на входе АЦП, например интегрирующая RC-цепочка.
11. Для уменьшения паразитных наводок от цифровой шины применяется гальваническая развязка электрического соединения термометрической косы. Передача цифровых сигналов осуществляется посредством индуктивной либо оптической связи с использованием трансформатора либо оптопары соответственно, а питание термометрический косы - через гальванически развязанный преобразователь напряжения.
12. Цифровой формат передачи данных измерения от термометрической косы к регистрирующему/отображающему прибору исключает потерю точности с увеличением длины соединительного провода.
Упрощение изготовления термометрической косы связано с отсутствием необходимости отслеживать порядок следования проводов от каждого датчика, что существенно упрощает и ускоряет процесс изготовления измерительного шнура. Порядок следования датчиков определяется в процессе калибровки термометрической косы.
Упрощение эксплуатации термометрической косы связано с использованием цифрового формата обмена данных косы и внешнего прибора, что дает возможность удаленного доступа, подключения группы кос к общей цифровой шине, записи данных измерений во внешнем приборе, и при выборе соответствующего протокола передачи данных и подключения радиомодема, - осуществления передачи данных по радиоканалу. Радиомодем также может находиться в составе электронного блока, например при подключении микроконтроллера к трансиверу.
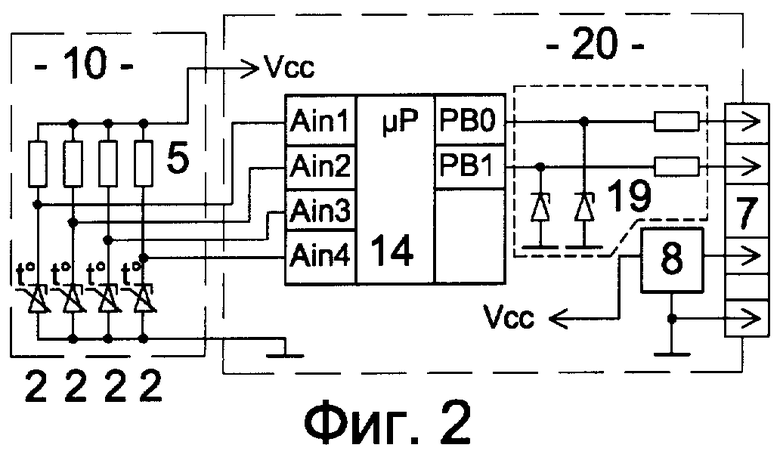
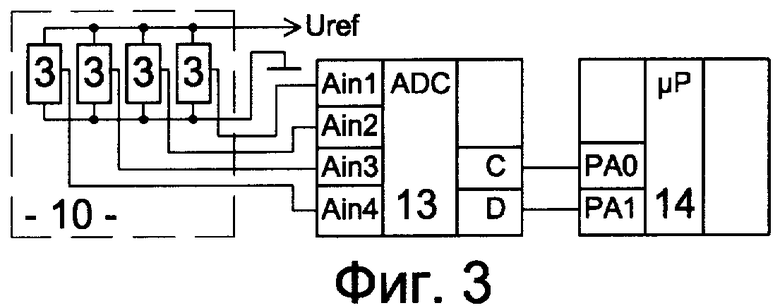
На фиг.1 приведен вариант электрической схемы термометрической косы с аналоговыми датчиками температуры. Количество каналов коммутатора для примера выбрано равным четырем. В измерительном шнуре 10 размещены термосопротивления 1, один вывод каждого из которых подключен к общему проводу. В электронном блоке 20 каждый из постоянных резисторов 5 включен с соответствующим термосопротивлением 1 в полумостовую схему резистивного делителя эталонного напряжения Uref, формируемого источником опорного напряжения 17. Напряжение термосигнала с каждого резистивного делителя поступает на соответствующий вход X0…X3 аналогового коммутатора 15. Номер канала аналогового коммутатора 15, соответствующий вход которого подключается к выходу Y, выбирается цифровым сигналом с микроконтроллера 14, например в виде двоичного кода по адресным входам A0, A1, подключенным к выводам PA0, PA1 порта ввода/вывода микроконтроллера 14. При соответствующем типе аналогового коммутатора данный цифровой сигнал с микроконтроллера может передаваться в последовательном формате, например, соответствующем стандарту SPI или I2C, а также в формате позиционного кода. Позиционный код целесообразно использовать в случае применения аналогового коммутатора, собранного на дискретных элементах, например, если каждый канал коммутируется одним или парой комплиментарных полевых транзисторов. Выход Y аналогового коммутатора 15 через интегрирующий каскад 18, выполненный на RC-цепочке, поступает в АЦП 13 на вход Ain1. Выход аналогового коммутатора 15 может быть подключен непосредственно к АЦП 13 без интегрирующего каскада 18 в случае отсутствия необходимости дополнительного подавления шума термосигнала, например в случае применения АЦП интегрирующего типа и/или вследствие достаточно большой паразитной емкости канала коммутатора, которая вместе с сопротивлениями 1 и 5 также создает интегрирующую RC-цепочку. Терморезистор 6, расположенный в электронном блоке 20, включен в аналогичную схему формирования термосигнала, поступающего в АЦП 13 на его второй вход Ain2. Термосигнал с терморезистора 6 может быть также подключен к свободному входу аналогового коммутатора 15. Терморезистор 6 служит для определения температуры электронного блока с целью компенсации влияния паразитных термоЭДС путем математической обработки оцифрованных термосигналов. Вместо терморезистора возможно использовать цифровой датчик температуры, подключаемый непосредственно к микроконтроллеру 14. Непосредственно к микроконтроллеру 14 могут быть подключены также сигналы с аналоговых датчиков, если микроконтроллер имеет встроенный АЦП, как показано на фиг.2. Для определения градиента температуры по объему электронного блока необходимо в нем установить два или более цифровых или аналоговых датчиков, аналогичных датчику 6. Обмен данными между АЦП 13 и микроконтроллером 14 осуществляется по цифровому интерфейсу, например по двухпроводному последовательному синхронному протоколу типа SPI посредством сигналов C и D, подключенных к выводам PB0 и PB1 порта ввода/вывода микроконтроллера 14, как показано на фиг.1. ППЗУ 16 аналогично АЦП 13 подключается к микроконтроллеру 14 для обмена данными посредством любого цифрового протокола, например I2C. Для обеспечения необходимого объема данных в схему могут быть включены несколько микросхем ППЗУ. ППЗУ 16 необходимо в том случае, если микроконтроллер 14 не имеет встроенного пользовательского ППЗУ, например типа Flash, или его объема недостаточно. ППЗУ в отдельной микросхеме или в составе микроконтроллера необходимо для хранения калибровочных коэффициентов и прочей информации, необходимой для эксплуатации термометрической косы, например, серийный номер косы, текстовые комментарии и др. Для подключения термометрической косы к внешнему устройству предусмотрен разъем 7, который имеет контакты для цифровой шины данных, например, стандарта RS485, а также контакты для подачи питания к термометрической косе. На фиг.1 представлен вариант схемы электронного блока с гальванической развязкой по питанию и цифровым сигналам. Гальваническая развязка по питанию выполнена на преобразователе напряжения 11, на входные выводы которого подается питающее напряжение с разъема 7, а выходные выводы преобразователя 11 подключены к общему проводу и внутренней шине питания Vcc. Преобразователь 11 также должен обеспечивать стабилизацию напряжения на своем выходе. Гальваническая развязка цифровых сигналов выполнена на оптопарах 12, вместо которых также могут быть применены трансформаторы для индуктивной передачи сигналов. Микроконтроллер 14 посредством сигналов T×D и R×D через оптопары 12 и контроллер цифровой шины 9 осуществляет обмен данными с внешним устройством. Контроллер цифровой шины 9 служит для преобразования сигналов стандарта RS232 в RS485 и обеспечивает обмен данными по внешней цифровой шине, подключенной к разъему 7. Управление сигналом направления передачи данных, необходимого для работы контроллера 9, выполняется микроконтроллером 14 аналогично сигналу T×D и на схеме не показано. В случае обмена данными по цифровой шине по стандарту RS232 сигналы T×D и R×D могут быть подключены к разъему 7 через оптопары или непосредственно в случае отсутствия гальванической развязки. Стандарты RS232 и RS485 являются асинхронными и в отличие от синхронных, например I2C и SPI, требуют точного соответствия скорости передачи данных. Однако поскольку в RS485 используется дифференциальная пара в качестве шины данных, то данный стандарт обеспечивает передачу данных на более значительные расстояния. Питающее напряжение для контроллера 9 формирует стабилизатор напряжения 8, который может быть выполнен как на интегральной микросхеме, так и на дискретных элементах, например на цепочке из резистора и стабилитрона, подключенного к общему проводу. Стабилизатор 8 необходим в случае завышенного напряжения, поступающего с разъема 7, что может быть специально предусмотрено для компенсации падения напряжения по длине провода при подключении группы термометрических кос к одной шине данных и питания. На фиг.2 приведен упрощенный вариант электрической схемы термометрической косы без гальванической развязки. АЦП с аналоговым коммутатором, ППЗУ и источник опорного напряжения находятся в составе микроконтроллера 14. Функции контроллера цифровой шины также выполняет микроконтроллер 14, с порта ввода/вывода которого сигналы PB0 и PB1 через каскад 19 из сопротивлений и стабилитронов, ограничивающих напряжение, подключаются к цифровой шине через разъем 7. Формат передачи по цифровой шине может соответствовать синхронному двухпроводному протоколу типа I2C [9] или SPI, или однопроводному типа Micro-LAN [8]. В последнем случае для подключения к цифровой шине достаточно одного вывода PB0. Стабилизатор напряжения 8 обеспечивает питание микроконтроллера, а также используется как источник эталонного напряжения для схемы формирования термосигналов. Стабилизатор 8 может быть выполнен на интегральной микросхеме, например, линейного стабилизатора напряжения общего назначения или на дискретных элементах. Стабилизатор 8 может отсутствовать в случае подачи на разъем 7 стабилизированного питающего напряжения. На фиг.2 в качестве датчиков температуры, размещенных в измерительном шнуре 10, применены интегральные микросхемы 2, включаемые в измерительную цепь аналогично термосопротивлениям 1. Кроме этого измерительный шнур 10 на фиг.2 отличается тем, что непосредственно в нем расположены постоянные резисторы 5, подключенные к проводу с эталонным напряжением, проходящим по длине измерительного шнура. На фиг.3 приведен вариант схемы измерительного шнура 10, в котором в качестве датчиков температуры применены интегральные микросхемы 3, которые двумя выводами подключаются к шине питания и на отдельном выводе формируют напряжение термосигнала. Вместо интегральных микросхем могут быть применены гибридные микросхемы или сборки на дискретных элементах, состоящие из термосопротивления и усилителя аналогового сигнала. В зависимости от требуемой точности измерения для питания датчиков 3 может быть использовано то же напряжение Vcc, что и для питания микроконтроллера 14 или специально стабилизированное опорное напряжение Uref. Аналоговый коммутатор находится в составе АЦП 13, поэтому термосигналы с датчиков 3 подключены к выводам АЦП 13, управляемого микроконтроллером 14.
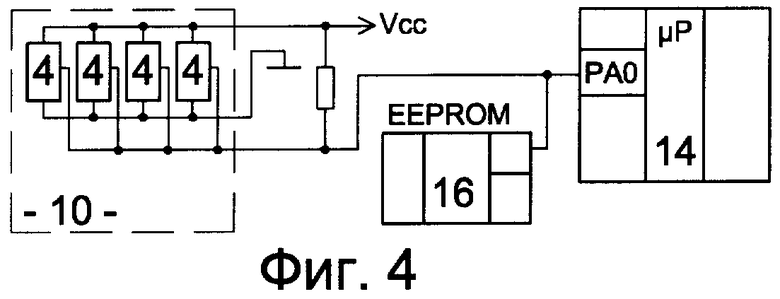
На фиг.4 приведен вариант электрической схемы термометрической косы с цифровыми датчиками температуры, подключенными к микроконтроллеру 14 по однопроводному интерфейсу с форматом передачи данных, обеспечивающим подключение группы датчиков к общей цифровой шине. В случае применения цифровых датчиков погрешность измерения будет определяться дискретностью цифрового формата, в котором датчик передает термосигнал, а также шумом термосигнала, включая воспроизводимость измерений. Нелинейность термосигнала цифровых датчиков существенна в диапазоне отрицательных температур и в отличие от температурной зависимости термосигнала аналоговых датчиков характеризуется наличием множества экстремумов. Нелинейность термосигнала цифровых датчиков также может быть скомпенсирована математической обработкой с использованием заранее известной температурной зависимости термосигнала. При этом для хранения калибровочных коэффициентов также необходимо отдельное ППЗУ, размещенное в электронном блоке, т.к. в цифровых датчиках пользовательское ППЗУ либо отсутствует, либо его объема недостаточно. Возможно использовать цифровые датчики с различными форматами, обеспечивающими подключение к общей цифровой шине, например I2C [9]. Однако в последнем случае, как правило, формат данных датчиков не допускает подключения к одной шине более 8 датчиков. Проблема ограничения количества датчиков может быть решена применением цифровых датчиков, обеспечивающих цепной режим выбора датчика. ППЗУ 16, размещенное в электронном блоке, может быть подключено к микроконтроллеру 14 по той же цифровой шине, что и датчики 4, или к отдельным выводам микроконтроллера 14. Питание датчиков 4 может осуществляться по отдельному проводу, проложенному в измерительном шнуре, или паразитивно по цифровой шине.
Варианты подключения микроконтроллера 14 к остальным элементам электрической схемы электронного блока 20, которые не показаны на фиг.3, 4, аналогичны вышеописанным вариантам, показанным на фиг.1, 2. Во всех описанных вариантах вместо микроконтроллера 14 может быть применена микросхема программируемой логики ПЛИС, выполняющая те же функции.
Процесс взаимодействия термометрической косы с внешним устройством происходит путем выполнения команд, которые посылает внешнее устройство, таких как запрос на чтение данных ППЗУ, запись в ППЗУ, чтение результата оцифровки АЦП, запуск внутренней автокалибровки АЦП по напряжению, выбор требуемого канала аналогового коммутатора, включение/выключение режима энергосбережения. Причем термометрическая коса отвечает только на запрос, в котором присутствует ее серийный номер, что дает возможность построения сети из термометрических кос путем их подключения к общей цифровой шине.
В процессе эксплуатации термометрической косы, чтобы получить результат измерений в градусах, необходима численная математическая обработка оцифрованного термосигнала, в процессе которой вычисляется температура по заранее известной функциональной зависимости для каждого датчика. Данные функциональные зависимости должны храниться в цифровом формате в ППЗУ термометрической косы. Вычисления может выполнять микроконтроллер термометрической косы либо микроконтроллер или микропроцессор внешнего прибора. Функциональные зависимости температуры от напряжения термосигнала определяют в процессе калибровки термометрической косы. Размерность и цифровой формат напряжения термосигнала может быть в вольтах или милливольтах, оцифрованных в формате с плавающей точкой или других единицах, например, в формате целочисленных данных, которые микроконтроллер 14 получает с АЦП 13, либо в формате, который посылает цифровой датчик температуры 4.
На фиг.6 представлены примеры вольт-температурных характеристик термосигналов, полученных с различных аналоговых датчиков в процессе калибровки двух термометрических кос. Группа кривых 1 получена при калибровке косы, в измерительном шнуре которой были размещены полупроводниковые термисторы с отрицательным ТКС, включенные по схеме на фиг.1. Линейная зависимость 3 получена с одной из интегральных микросхем 3, включенных по схеме измерительного шнура 10 на фиг.3.
Калибровка термометрической косы включает в себя определение последовательности расположения датчиков в измерительном шнуре и калибровку датчиков, в процессе которой определяют вольт-температурные характеристики термосигналов с датчиков.
Для определения температурных зависимостей термосигналов все измерительные шнуры термометрической косы помещают в камеру термостата, в которой устанавливают необходимую температуру, и получают оцифрованные значения термосигналов со всех датчиков. Цикл получения термосигналов с датчиков и соответствующей им температуры в камере термостата повторяют, каждый раз изменяя температуру, и тем самым получают температурные зависимости термосигналов каждого датчика в виде дискретных функций в экспериментально исследованном диапазоне температур. В случае получения термосигналов только при двух температурах камеры термостата температурные зависимости термосигналов будут получены в приближении линейной функции. Термометрическую косу подключают по цифровой шине к регистрирующему прибору, посредством которого получают оцифрованное значение термосигнала с каждого датчика. Процессом калибровки может управлять внешний регистрирующий и/или отображающий прибор либо подключенный к нему ПК. Значение температуры, установившейся в камере термостата на момент опроса АЦП, получают либо путем ручного ввода с клавиатуры регистрирующего прибора или с клавиатуры ПК, либо путем получения в цифровом формате значения температуры с аналогично подключенной по цифровой шине к регистрирующему прибору заранее откалиброванной образцовой термометрической косы.
Полученные температурные зависимости термосигналов записывают в ППЗУ термометрической косы в виде ряда калибровочных коэффициентов в цифровом формате, структура которого может быть различной. Ряд численных значений, по которым возможно восстановить температурную зависимость термосигнала как непрерывную функцию, в настоящем описании названы калибровочными коэффициентами.
Структура цифрового формата калибровочных коэффициентов может соответствовать упомянутой дискретной функции, в которой ряду температур сопоставлен ряд оцифрованных значений термосигналов. Такие пары термосигнала и температуры фактически являются экспериментальными данными. На фиг.6 они обозначены точками, через которые проходит непрерывная линия вольт-температурной характеристики сигнала с конкретного датчика, которую и требуется зафиксировать в ППЗУ термометрической косы.
Структура цифрового формата калибровочных коэффициентов может соответствовать ряду коэффициентов непрерывной функции, в которой калибровочные коэффициенты представляют собой коэффициенты функциональной зависимости температуры от термосигнала. Например функциональная зависимость может быть полиномиальной:
T=A0+A1·x+A2·x2+…+An·xn,
где T - температура, x - значение термосигнала, A0…An - калибровочные коэффициенты. В этом случае калибровочные коэффициенты являются коэффициентами уравнения. Получают коэффициенты регрессионной математической обработкой экспериментально полученной дискретной функции температурной зависимости термосигнала.
Для компенсации влияния паразитных ЭДС в точках электрических соединений, таких как места пайки проводов и выводов микросхем, а также влияния нежелательных температурных девиаций параметров элементов электрической схемы, таких как температурная девиация сопротивлений постоянных резисторов 5, находящихся в электронном блоке, необходимо экспериментально получить функциональную зависимость термосигналов от температуры электронного блока при неизменной температуре измерительного шнура. Целесообразно получить зависимости приращений термосигналов от температуры электронного блока, приняв за нулевые величины данные приращения при температуре электронного блока, при которой производилась калибровка датчиков в измерительном шнуре. Полученные зависимости температурных приращений будут являться арифметическими поправками для соответствующих термосигналов и при сложении образуют значения для более точного вычисления температур датчиков. Поскольку данное температурное приращение термосигнала по сравнению с динамическим диапазоном термосигнала незначительно, то можно принять зависимость приращения термосигнала от температуры электронного блока линейной и ограничиться двумя экспериментальными точками для двух температур электронного блока. При одной из этих температур, как сказано выше, температурные приращения равны нулю, поскольку при данной температуре электронного блока получают зависимости термосигналов от температуры датчиков. Таким образом, остается получить упомянутые температурные приращения при другой температуре электронного блока. Например, калибровка датчиков измерительного шнура произведена при комнатной температуре корпуса электронного блока 25 [°C], в камере термостата установлена температура 35 [°C]. Не вынимая измерительных шнуров из термостата, помещают электронный блок во второй термостат, устанавливают в нем температуру минус 30 [°C] и выдерживают до того, как градиент температуры в объеме корпуса электронного блока станет незначительным, что можно определять либо по времени выдержки, либо по разности температур с нескольких датчиков, установленных в различных точках электронного блока. Заново выполняют калибровку датчиков измерительного шнура при текущей температуре 35 [°C] и находят приращения термосигналов со всех датчиков как разности термосигналов при различных температурах электронного блока. Зная разность температур электронного блока 25-(-30)=55, определяют зависимость приращения термосигнала от температуры электронного блока как линейную функцию, представленную двумя коэффициентами. Данные коэффициенты для всех термосигналов записывают в ППЗУ. Без допущения линейности зависимости термосигналов от температуры электронного блока для получения коэффициентов функции двух переменных (двух температур: датчиков измерительного шнура и электронного блока) потребуется многократная калибровка датчиков измерительного шнура при ряде различных температур электронного блока и потребуется больший объем данных ППЗУ для записи калибровочных коэффициентов, что может быть применимо лишь в исключительных случаях.
В процессе изготовления измерительного шнура времяемким является процесс отслеживания очередности соединительных проводов, идущих от каждого аналогового датчика в электронный блок, либо процесс определения и отслеживания очередности серийных номеров цифровых датчиков. Для оптимизации производства целесообразно данные соединительные провода подключать (например, припаивать к контактным площадкам печатной платы) ко входам аналогового коммутатора в произвольном порядке либо монтировать цифровые датчики без отслеживания их серийных номеров. Вследствие произвольного порядка подключения датчиков ко входам аналогового коммутатора потребуется определение соответствия каналов аналогового коммутатора подключенным к ним датчикам либо определение очередности серийных номеров цифровых датчиков, что возможно выполнить по отклику термосигналов на изменение температуры датчиков, например, в результате нагрева участка измерительного шнура. Для этого последовательно нагревают датчики в порядке их расположения в измерительном шнуре путем локального нагрева участка измерительного шнура с длиной меньшей, чем расстояние между датчиками, и одновременно регистрируют изменения всех термосигналов. Термометрическую косу подключают по цифровой шине к регистрирующему прибору, посредством которого получают результат оцифровки термосигналов всех датчиков последовательно. Причем длительность сдвига участка нагрева измерительного шнура на величину, равную расстоянию между датчиками, должна быть, как минимум, вдвое больше длительности цикла получения оцифрованных значений всех термосигналов. Анализируют полученные данные с целью обнаружения отклика термосигнала на нагрев датчика. В процессе последовательного нагрева датчиков составляют численный ряд номеров каналов коммутатора либо ряд серийных номеров цифровых датчиков в той последовательности, в которой были зарегистрированы отклики термосигналов на нагрев, и записывают данный численный ряд в ППЗУ термометрической косы.
ЛИТЕРАТУРА
[1] ГОСТ 25358-82, Грунты, Метод полевого определения температуры (Приложение 3).
[2] SU 1234730, 1986.05.30, МПК G01K 7/02, Многоканальный цифровой термометр.
[3] US 6431750, 2002.08.13, МПК G01K 7/00, Flexible temperature sensing probe.
[4] Преображенский В.П. Теплотехнические измерения и приборы. - М.: Энергия, 1978, 704 с.
[5] Виглеб Г. Датчики - М.: Мир, 1989, 196 с.
[6] Datasheet ADG508A, Analog Devices, www.analog.com
[7] Datasheet AD7714, Analog Devices, www.analog.com
[8] Datasheet DS18S20, Dallas Semiconductor, www.dalsemi.com
[9] Datasheet DS1624, Dallas Semiconductor, www.dalsemi.com
Изобретение относится к термометрии и предназначено для измерения температуры контактным способом одновременно в группе местоположений, по которым может быть проложен измерительный шнур термометрической косы. В измерительном шнуре расположены датчики температуры. В состав косы входит электронная часть, выполненная в виде электронного блока, имеющего разъем для электрического подключения косы к внешнему отображающему прибору посредством цифровой шины. Передача по цифровой шине обеспечивается с помощью микроконтроллера (либо ПЛИС), расположенного в электронном блоке. Формат передачи позволяет подключать группу кос к общей цифровой шине. Предусмотрены различные варианты схем с использованием гальванической развязки, различных синхронных и асинхронных протоколов передачи данных, различных типов датчиков температуры, а также варианты конструктивного исполнения измерительного шнура. Электронный блок содержит ППЗУ, в котором записаны калибровочные коэффициенты, по которым возможно восстановить температурную зависимость термосигнала, например вольт-температурную характеристику для каждого датчика косы, что необходимо для вычисления результатов измерения в единицах градусов. При этом указанное устройство реализует соответствующий способ дистанционного измерения температуры. Технический результат - повышение точности измерения, увеличение компактности и упрощение изготовления и эксплуатации. 2 н. и 15 з.п. ф-лы, 6 ил.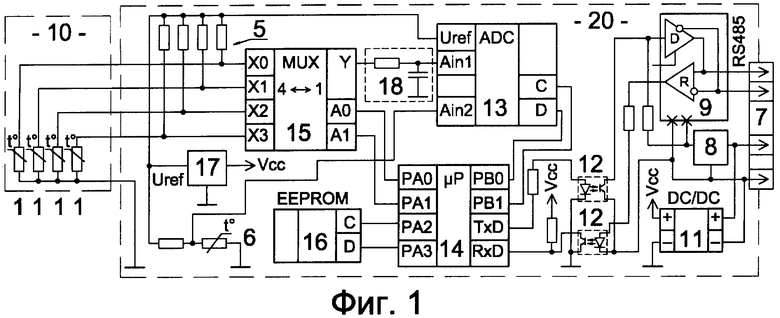
1. Термометрическая коса, включающая один или более измерительных шнуров, в каждом из которых расположен один или более датчиков температуры, включающая также энергонезависимое перезаписываемое запоминающее устройство ППЗУ, отличающаяся тем, что ППЗУ содержит калибровочные коэффициенты функций температурных зависимостей термосигналов датчиков, а также информацию, необходимую для эксплуатации термометрической косы, как минимум, серийный номер косы и ряд идентификаторов датчиков, при этом идентификатором для аналогового датчика является номер канала коммутатора, к которому подключен соответствующий датчик, а для цифрового датчика является серийный номер данного датчика, в качестве которого выступает адрес данного датчика на цифровой шине, причем ППЗУ выполнено либо в отдельных корпусах одной или более микросхем либо находится в составе микроконтроллера либо микросхемы программируемой логики ПЛИС.
2. Термометрическая коса по п.1, отличающаяся тем, что дополнительно содержит микроконтроллер либо микросхему программируемой логики ПЛИС, обеспечивающие математическую обработку термосигнала с использованием калибровочных коэффициентов, записанных в ППЗУ, и/или обеспечивающие обмен данными с датчиками температуры и/или внешним устройством, а также контроллер цифровой шины, обеспечивающий обмен данными между термометрической косой и внешним цифровым устройством в виде отображающего или регистрирующего прибора и позволяющий подключать группу термометрических кос к единой шине цифровых данных, причем ППЗУ выполнено либо в отдельных корпусах одной или более микросхем либо находится в составе микроконтроллера либо ПЛИС, а контроллер цифровой шины выполнен либо в отдельном корпусе микросхемы и/или на дискретных элементах либо находится в составе микроконтроллера или ПЛИС, причем для обмена данными с внешним устройством используется разъем для электрического подключения термометрической косы, имеющей выводы для подачи питания и выводы для цифровой шины, подсоединенные к контроллеру цифровой шины, и/или трансивер, обеспечивающий прием и передачу данных по радиоканалу.
3. Термометрическая коса по п.1, отличающаяся тем, что в электронном блоке дополнительно размещены каскады гальванической развязки, включающие гальванически развязанный преобразователь напряжения, а также каскады индуктивной и/или оптронной передачи цифровых сигналов, выполненные с использованием трансформаторов для индуктивной передачи сигналов либо оптопар.
4. Термометрическая коса по пп.1-3, отличающаяся тем, что содержит дополнительно один или более датчиков для измерения температуры электронного блока.
5. Термометрическая коса по п.2, отличающаяся тем, что контроллер цифровой шины выполнен с возможностью передачи данных по протоколу асинхронной передачи данных, например RS-232 или RS-485, либо по протоколам синхронной передачи данных, например SPI или I2C, либо по протоколу однопроводной передачи данных, например Micro-LAN.
6. Термометрическая коса по п.1, отличающаяся тем, что измерительный шнур дополнительно обрамлен металлическим либо полимерным гибким рукавом в виде гофрированной трубки, проволочной оплетки либо проволочной или ленточной спирали.
7. Термометрическая коса по п.1, отличающаяся тем, что в качестве аналоговых датчиков температуры применены термосопротивления, в частности металлические термосопротивления или полупроводниковые термисторы, либо аналогично включаемые в измерительную цепь интегральные микросхемы, каждое из которых одним выводом соединено с общим проводом, проходящим по длине измерительного шнура, а другим выводом соединено с отдельным для каждого датчика постоянным резистором и подключено по схеме резистивного делителя эталонного напряжения.
8. Термометрическая коса по п.7, отличающаяся тем, что постоянные резисторы измерительной цепи расположены в электронном блоке термометрической косы.
9. Термометрическая коса по п.7, отличающаяся тем, что постоянные резисторы измерительной цепи расположены в измерительном шнуре, в котором помимо общего провода проходит провод с потенциалом эталонного напряжения, к которому подключены постоянные резисторы измерительной цепи либо термосопротивления.
10. Термометрическая коса по п.7, отличающаяся тем, что омическое значение термосопротивлений при изменении температуры в пределах измеряемого диапазона, не менее 1 кОм и не более 50 кОм.
11. Термометрическая коса по п.1, отличающаяся тем, что в качестве аналоговых датчиков температуры применены интегральные микросхемы либо сборки на дискретных элементах, состоящие из термосопротивления и усилителя аналогового сигнала, формирующие напряжения, зависящие от температуры, причем микросхемы либо сборки подключены к шине питания, проходящей по длине измерительного шнура и состоящей из общего провода и провода с потенциалом эталонного напряжения.
12. Термометрическая коса по п.11, отличающаяся тем, что чувствительность аналоговых датчиков находится в пределах от 2,5 до 20 [мВ/°С].
13. Способ калибровки термометрической косы, включающий определение последовательности датчиков в измерительном шнуре и определение температурных зависимостей сигналов всех датчиков, отличающийся тем, что последовательность датчиков в измерительном шнуре определяют тем, что последовательно нагревают датчики в порядке их расположения в измерительном шнуре путем локального нагрева участка измерительного шнура с длиной, меньшей чем расстояние между датчиками, и одновременно регистрируют изменения сигналов со всех датчиков тем, что подключают термометрическую косу по цифровой шине к регистрирующему прибору, посредством которого получают сигналы последовательно со всех датчиков, анализируют полученные цифровые данные с целью обнаружения отклика сигнала на нагрев датчика, составляют численный ряд номеров каналов коммутатора либо ряд серийных номеров цифровых датчиков измерительного шнура в той последовательности, в которой были зарегистрированы отклики сигналов на нагрев, и записывают данный численный ряд в ППЗУ термометрической косы, а температурные зависимости сигналов всех датчиков определяют тем, что помещают измерительный шнур термометрической косы в камеру термостата, устанавливают необходимую температуру, подключают термометрическую косу по цифровой шине к регистрирующему прибору, посредством которого получают оцифрованное значение сигнала с каждого датчика измерительного шнура, получают значение температуры в камере термостата либо путем ручного ввода с клавиатуры регистрирующего прибора или клавиатуры персонального компьютера, либо по цифровой шине от заранее откалиброванной образцовой термометрической косы, подключенной к регистрирующему прибору, обрабатывают полученные цифровые значения температуры термостата и сигналов датчиков с целью получения калибровочных коэффициентов, которые записывают в ППЗУ термометрической косы, причем оцифрованные значения сигнала с каждого датчика получают как минимум при двух различных значениях температуры в камере термостата.
14. Способ калибровки термометрической косы по п.5, отличающийся тем, что калибровочные коэффициенты представляют собой дискретные функции температурных зависимостей сигналов датчиков в виде ряда значений сигналов каждого датчика и соответствующих им температур в камере термостата на моменты опроса АЦП.
15. Способ калибровки термометрической косы по п.5, отличающийся тем, что калибровочные коэффициенты представляют собой коэффициенты непрерывных функций температурных зависимостей сигналов датчиков, при этом коэффициенты определяют регрессионной математической обработкой дискретных функций зависимостей температур от сигналов датчиков, полученных экспериментально в результате калибровки датчиков.
16. Способ калибровки термометрической косы по п.7, отличающийся тем, что функциональная зависимость представляет собой полиномиальную зависимость температуры от сигнала датчика:
T=A0+A1·x+A2·x2+…+An·xn,
где Т - температура, х - значение сигнала датчика, А0…An - калибровочные коэффициенты.
17. Способ калибровки термометрической косы по любому из пп.5-8, отличающийся тем, что дополнительно определяют зависимости аналоговых сигналов датчиков измерительных шнуров от температуры электронного блока, для чего электронный блок помещают в камеру второго термостата, устанавливают в нем требуемую температуру и получают оцифрованные значения сигналов с каждого датчика измерительных шнуров как минимум при двух различных температурах электронного блока.
| US 6431750 B1, 13.08.2002 | |||
| Компоненты и технологии | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРЕОБРАЖЕНСКИЙ В.П | |||
| Теплотехнические измерения и приборы | |||
| - М.: Энергия, 1978 | |||
| Устройство для автоматического регулирования метадины | 1938 |
|
SU56593A1 |

