Изобретение относится к области технической кибернетики и может быть использовано для определения состояний объектов.
Известен способ анализа сигнала о состоянии объекта [1], включающий формирование распознающих эталонов на основе обучающих сигналов, формирование набора оценок о состоянии объекта, сравнение полученных оценок с порогом распознавания, в результате которого формируется решение о предполагаемом состоянии объекта. Недостатком данного способа является невозможность анализа несегментированных сигналов.
Наиболее близким к заявленному является способ анализа сигнала о состоянии объекта [2], включающий нормирование всех сигналов, формирование распознающих эталонов на основе обучающих нормированных сигналов о состоянии объекта, формирование набора величин оценок о состоянии объекта, сравнение полученных величин оценок с порогом распознавания состояния объекта.
Основным недостатком изложенного в прототипе способа является то, что на этапе определения состояния объекта (на этапе распознавания) предполагается, что моменты смены состояний известны, выборки, представленные для распознавания, локализованы, т.е. соответствуют одному состоянию. Таким образом, известный способ не позволяет определять моменты смены состояния объекта и требует предварительной сегментации однородных по состоянию данных и формирования на их основе контрольных выборок. Кроме того, в изложенном способе нет обоснования задания порогов распознавания.
Изобретение направлено на расширение функциональных возможностей анализа сигналов, представляющих собой выборки значений, соответствующих нескольким состояниям путем непрерывной последовательной обработки групп отсчетов анализируемых сигналов о состоянии объектов. Благодаря этому появляется возможность обработки несегментрованнных данных, т.е. сегментации выборки, содержащей данные о нескольких состояниях, и определения моментов смены состояний объектов.
Указанный технический результат достигается тем, что в способе анализа сигналов о состоянии объекта, включающем в себя нормирование всех сигналов, формирование распознающих эталонов на основе обучающих нормированных сигналов о состоянии объекта, формирование оценок состояния объекта, сравнение полученных оценок с порогом распознавания состояния объекта, после формирования распознающих эталонов для каждого состояния объекта формируют пороги распознавания, а формирование оценок состояния объекта происходит в контексте возможных переходов в другие состояния, после чего полученные оценки сравнивают с соответствующими наблюдаемому состоянию порогами распознавания.
Операция нормирования осуществляется относительно максимального уровня квантования сигналов по следующему правилу:
где: S(t) - наблюдаемый предварительно квантованный сигнал;
S(t)n - нормированный сигнал;
Н - максимальный уровень квантования.
На этапе обучения для каждого состояния объекта формируют репрезентативные обучающие сигналы, на основе которых строят соответствующие распознающие эталоны.
Формирование распознающих эталонов включает в себя формирование для каждого i-го состояния объекта одномерных матриц вероятностей появления значений нормированного репрезентативного обучающего сигнала Мi одн.[Р(φk)] и двумерных матриц вероятностей появления значений нормированного репрезентативного обучающего сигнала с учетом предыдущих значений  где элементы матриц вычисляют в соответствии с правилом:
где элементы матриц вычисляют в соответствии с правилом:
где: φk - наблюдаемое значение нормированного репрезентативного обучающего сигнала о состоянии объекта в текущий момент времени, k∈[0,H];
φp - наблюдаемое значение нормированного репрезентативного обучающего сигнала о состоянии объекта в предыдущий момент времени, р∈[0,H];
Н - максимальный уровень квантования;
Pi(φk) - вероятность появления значения φk для состояния i,  ;
;
 - вероятность появления значения φk после появления значения φp для состояния i,
- вероятность появления значения φk после появления значения φp для состояния i,  ;
;
I - число возможных состояний объекта;
Nφk - число появления φk;
 - число появления комбинации
- число появления комбинации  ;
;
N - общее число дискретных нормированных отсчетов репрезентативного обучающего сигнала.
Формирование порогов распознавания hij для каждого i-го состояния объекта  происходит в контексте возможного перехода в другие j-е состояния
происходит в контексте возможного перехода в другие j-е состояния  путем последовательного считывания групп заданной длины l дискретных отсчетов нормированного репрезентативного обучающего сигнала для i-го состояния, вычисления логарифмических отношений вероятности появления данных групп для i-го состояния к вероятности появления данных групп для другого j-го возможного состояния, суммирования логарифмических отношений, имеющих положительные значения, и вычисления отношения полученной суммы к числу соответствующих ей положительных логарифмических отношений. В общем виде пороги распознавания определяются по следующему правилу [3, 4]:
путем последовательного считывания групп заданной длины l дискретных отсчетов нормированного репрезентативного обучающего сигнала для i-го состояния, вычисления логарифмических отношений вероятности появления данных групп для i-го состояния к вероятности появления данных групп для другого j-го возможного состояния, суммирования логарифмических отношений, имеющих положительные значения, и вычисления отношения полученной суммы к числу соответствующих ей положительных логарифмических отношений. В общем виде пороги распознавания определяются по следующему правилу [3, 4]:
 i≠j
i≠j
где hij - порог распознавания для наблюдения i-го состояния объекта в контексте возможного перехода в состояние j;
k - номер обрабатываемой последовательности дискретных нормированных значений репрезентативного обучающего сигнала;
l - предварительно заданная длина обрабатываемых групп дискретных отсчетов;
N - общее число дискретных нормированных отсчетов обучающих сигналов;
n - число суммированных положительных логарифмических отношений;
Pi груп. - вероятность появления последовательности наблюдений нормированного репрезентативного обучающего сигнала Si(t)n с момента времени (t-l) для состояния i, определяемая следующим образом:

Рj груп. - вероятность появления последовательности наблюдений нормированного репрезентативного обучающего сигнала Si(t)n с момента времени (t-l) для состояния j, определяемая следующим образом:

Для уменьшения расчетной нагрузки за начальное состояние объекта принимают наиболее вероятное состояние, т.е., к примеру, если объект может находиться в 3-х состояниях, то считают, что объект находится в 1-ом состоянии, которое для него наиболее вероятно. Если начальное состояние объекта неизвестно, то до первого момента смены состояния объекта формирование оценок состояния объекта в контексте возможных переходов в другие состояния происходит для каждого возможного текущего состояния. После превышения одной из оценок соответствующего порогового уровня определяют новое и предыдущее состояние объекта, а дальнейшие расчеты производят только для определенного нового текущего состояния.
Формирование оценок состояния объекта в контексте возможных переходов в другие состояния происходит в каждый дискретный отсчет времени t путем последовательной обработки групп дискретных нормированных отсчетов анализируемого (наблюдаемого) сигнала и отслеживания момента перехода объекта из текущего состояния j в возможные состояния у в соответствии с правилом [3, 4]:
A0 ij=0,

j≠i,
где: i - номер текущего состояния, i∉[1, I];
j - номер состояния, в которое может перейти объект,  ;
;
I - число возможных состояний объекта;
t - текущий момент времени;
l - предварительно заданная длина обрабатываемых групп дискретных отсчетов;
аt ij - признак перехода объекта из текущего состояния i в состояние j в момент времени t;
At ij - накопленный признак перехода объекта из состояния i в состояние j в момент времени t;
Sнабл.(t)n - значение нормированного анализируемого (наблюдаемого) сигнала в момент времени t.
Решение о смене текущего i-го состояния объекта на состояние j принимают в случае выполнения следующего условия:
At ij>hij,
где: At ij - накопленный признак перехода объекта из состояния i в состояние j в момент времени t;
hij - порог распознавания для наблюдения i-го состояния объекта в контексте возможного перехода в состояние j.
При этом моментом смены состояния объекта считают момент времени tсегм., в котором накопленный признак перехода был равен нулю и начал увеличиваться до превышения соответствующего порога распознавания в момент времени t (tсегм<t). После смены состояния текущим становится состояние j, а все накопленные признаки переходов обнуляют.
Наиболее существенной новой операцией в заявленном способе является последовательная обработка групп дискретных отсчетов сигналов, позволяющая формировать оценки состояния объекта в контексте возможных переходов в другие состояния и соответствующие пороги распознавания.
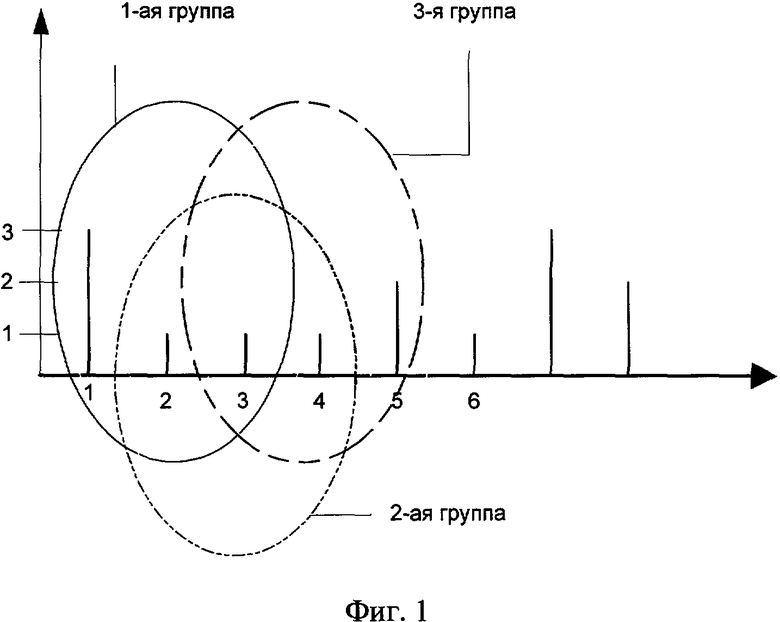
Изобретение поясняется графическими материалами. На Фиг.1 представлен пример последовательной обработки групп дискретных отсчетов обучающего или анализируемого сигнала для заданной длины группы l, равной трем.
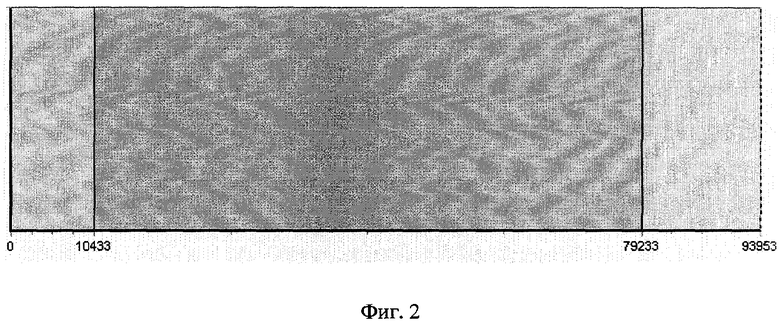
На Фиг.2 представлен пример обнаружения фрагмента исполняемого кода в файле текстового формата *.doc на основе описанного выше способа для порога распознавания hdoc.exe.=9. Как видно из представленного графика, вставленный в текстовый документ исполняемый файл идентифицирован правильно.
Результаты экспериментальных исследований показывают существенную зависимость показателей достоверности распознавания (ошибок первого и второго рода) от длины группы обрабатываемых отсчетов. Оптимальное значение принадлежит интервалу от двух до четырех отсчетов, что может свидетельствовать о наличии корреляционных связей в словах алфавита соответствующей длины.
Источники информации
1. Киселев Н.В. Сечкин В.А. Техническая диагностика методами нелинейного преобразования. - Л. Энергия. 1980, 109 с.
2. Храбров В.В. Способ анализа сигналов о состоянии объекта. Патент РФ №2090928.
3. Никифоров И.В. Последовательное обнаружение изменения свойств временных рядов. М.: Наука, 1983. - 198 с.
4. Моттль В.В. Скрытые Марковские модели в структурном анализе сигналов. М.: Физматлит, 1999. - 350 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 1992 |
|
RU2090928C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СИГНАЛОВ | 2012 |
|
RU2485586C1 |
| СИСТЕМА ГОЛОСОВОЙ ИДЕНТИФИКАЦИИ ДИКТОРА | 2009 |
|
RU2385272C1 |
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 2007 |
|
RU2355028C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ | 1999 |
|
RU2163394C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 2000 |
|
RU2198426C2 |
| Способ релейной защиты энергообъекта | 2019 |
|
RU2720710C1 |
| СИСТЕМА ИСКАЖЕНИЯ ГОЛОСА ДИКТОРА | 2009 |
|
RU2403627C1 |
| Способ распознавания варианта наведения подвижного объекта на один из летательных аппаратов группы | 2019 |
|
RU2713212C1 |
Изобретение относится к области технической кибернетики и может быть использовано для определения состояний объектов. Технический результат заключается в расширении функциональных возможностей анализа сигналов и возможности обработки несегментрованнных данных. Технический результат достигается благодаря тому, что после формирования распознающих эталонов для каждого состояния объекта формируют пороги распознавания, а формирование оценок состояния объекта происходит в контексте возможных переходов в другие состояния, после чего полученные оценки сравнивают с соответствующими наблюдаемому состоянию порогами распознавания. 2 ил.
Способ анализа сигнала о состоянии объекта, включающий в себя нормирование всех сигналов, формирование распознающих эталонов на основе обучающих нормированных сигналов о состоянии объекта, формирование оценок состояния объекта, сравнение полученных оценок с порогом распознавания состояния объекта, отличающийся тем, что нормирование сигнала осуществляют относительно максимального уровня квантования сигналов
где S(t) - наблюдаемый предварительно квантованный сигнал;
S(t)n - нормированный сигнал;
Н - максимальный уровень квантования,
формирование распознающих эталонов включает в себя формирование для каждого i-го состояния объекта одномерных матриц вероятностей появления значений нормированного репрезентативного обучающего сигнала Miодн[Р(φk) и двумерных матриц вероятностей появления значений нормированного репрезентативного обучающего сигнала с учетом предыдущих значений  где элементы матриц вычисляют в соответствии с правилом
где элементы матриц вычисляют в соответствии с правилом
где φk - наблюдаемое значение нормированного репрезентативного обучающего сигнала о состоянии объекта в текущий момент времени, k∈[0,H];
φр - наблюдаемое значение нормированного репрезентативного обучающего сигнала о состоянии объекта в предыдущий момент времени, р∈[0,H];
Н - максимальный уровень квантования;
Pi(φk) - вероятность появления значения φk, для состояния i, 
 - вероятность появления значения φk после появления значения φр, для состояния i,
- вероятность появления значения φk после появления значения φр, для состояния i, 
I - число возможных состояний объекта;
Nφk - число появления φk;
 - число появления комбинации φkφp;
- число появления комбинации φkφp;
N - общее число дискретных нормированных отсчетов репрезентативного обучающего сигнала,
после формирования распознающих эталонов для каждого состояния i  объекта формируют пороги распознавания в контексте возможного перехода в другие состояния j
объекта формируют пороги распознавания в контексте возможного перехода в другие состояния j  в соответствии со следующим правилом:
в соответствии со следующим правилом:
где hij - порог распознавания для наблюдения i-го состояния объекта в контексте возможного перехода в состояние j;
Pi груп - вероятность появления последовательности наблюдений нормированного репрезентативного обучающего сигнала Si(t)n с момента времени (t-l) для состояния i, определяемая следующим образом:

Рi груп - вероятность появления последовательности наблюдений нормированного репрезентативного обучающего сигнала Si(t)n с момента времени (t-l) для состояния j, определяемая следующим образом:

l - предварительно заданная длина обрабатываемых групп дискретных отсчетов;
M(X(t)) - операция определения математического ожидания дискретной случайной величины X(t), учитывающая только положительные логарифмические отношения,
формирование оценок состояния объекта происходит также в контексте возможных переходов в другие состояния путем отслеживания момента перехода объекта из текущего состояния i в состояние j в каждый дискретный момент времени t в соответствии с правилом
A0 ij=0,

где i - номер текущего состояния, i∈[1,I];
j - номер состояния, в которое может перейти объект, 
I - число возможных состояний объекта;
t - текущий момент времени;
l - предварительно заданная длина обрабатываемых групп дискретных отсчетов;
аt ij - признак перехода объекта из текущего состояния i в состояние j в момент времени t;
Аt ij - накопленный признак перехода объекта из состояния i в состояние j в момент времени t;
Sнабл.(t)n - значение нормированного анализируемого (наблюдаемого) сигнала в момент времени t,
после чего полученные оценки сравнивают с соответствующими наблюдаемому состоянию порогами распознавания, а решение о смене i-го состояния объекта на состояние j принимают в случае выполнения следующего условия:
At ij>hij,
где Аt ij - накопленный признак перехода объекта из состояния i в состояние j в момент времени t;
hij - порог распознавания для наблюдения i-го состояния объекта в контексте возможного перехода в состояние j,
при этом моментом смены состояния объекта считают момент времени, в котором накопленный признак перехода был равен нулю и начал увеличиваться до превышения соответствующего порога распознавания в момент времени t.
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 1992 |
|
RU2090928C1 |
| СПОСОБ АДАПТИВНОГО РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ ОБРАЗОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160467C1 |
| СПОСОБ ОПЕРАТИВНОГО АНАЛИЗА СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2204167C2 |
| US 5027420, 25.06.1991. | |||

