Изобретение относится к гидроакустике и предназначено для исследования подводной обстановки и определения гидрофизических неоднородностей морской среды в условиях шельфовой зоны.
Известны и широко применяются в практике подводных исследований океана методы акустического зондирования гидрофизических неоднородностей (акустической томографии), построенные на принципе излучения сложного сигнала с частотой или фазовой модуляцией и приеме его в удаленной точке точечной (размеры много меньше длины волны) акустической антенной (Гаврилов А.Н. Об эксперименте "Arctic climate observation using underwater sound" - в книге Акустика океана. Сб. трудов школы-семинара акад. Л.М.Бреховских. - М.: ГЕОС, 1998, с.10-15). При этом для повышения разрешения во времени при обработке выполняется свертка принятого сигнала с излученным. Это позволяет определять времена приходов зондирующего сигнала и по ним реконструировать картину распространения акустических волн, которая определяется гидрофизическими параметрами и неоднородностями среды.
Недостатком способа является невозможность определения вертикальных и горизонтальных углов прихода зондирующих сигналов, что особенно важно в условиях многолучевости и, в частности, в условиях шельфовой зоны при размещении приемных антенн вблизи дна.
Известен также способ акустического зондирования океана (патент РФ №2221261, МПК 7 G01S 15/00, 3/16, 2002 г.), в котором излучают сложный сигнал, затем принимают его в удаленной точке тремя идентичными по чувствительности ортогонально ориентированными в пространстве приемниками колебательной скорости (ПКС) Vx, Vy, Vz, имеющими единый фазовый центр, на выходе каждого ПКС, вычисляют свертки принятого и излученного сигналов, для каждого i-го фрагмента сигнала, выделенного во времени, определяют максимумы напряжения соответствующих каналов приемников колебательной скорости (UVx)i, (UVy)i, (UVz)i, и вычисляют по ним горизонтальные и вертикальные углы, причем горизонтальный угол вычисляют в виде arctg[(UVy)i/(UVx)i], а вертикальный в виде arctg{(UVz)i/[(UVx)i2+(UVy)i2]0,5}.
Указанный способ акустического зондирования океана является наиболее близким к заявленному изобретению.
Недостатком указанного способа акустического зондирования океана является большая погрешность определения вертикального угла прихода зондирующего сигнала в условиях шельфовой зоны, связанная с невозможностью разделения в удаленной точке приема лучей с положительными и отрицательными вертикальными углами (углами скольжения), обусловленными многолучевостью, т.е. многократными отражениями зондирующего сигнала от поверхности моря и морского дна.
В основу изобретения положена задача - повышение точности определения вертикальных углов (углов скольжения) в условиях шельфовой зоны с помощью приемников колебательной скорости.
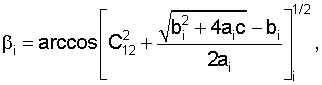
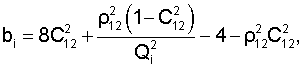
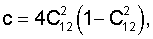
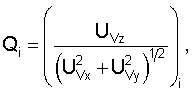
Поставленная задача достигается тем, что в способе акустического зондирования морской среды в условиях шельфовой зоны, в котором излучают сложный сигнал, затем принимают его в удаленной точке тремя идентичными по чувствительности ортогонально ориентированными в пространстве приемниками колебательной скорости Vx, Vy, Vz, имеющими единый фазовый центр, на выходе каждого приемника колебательной скорости вычисляют свертки принятого и излученного сигналов, для каждого i-го фрагмента сигнала, выделенного во времени, определяют максимумы напряжения соответствующих каналов приемников колебательной скорости (UVx)i (UVy)i (UVz)i, и вычисляют по ним горизонтальные и вертикальные углы, причем горизонтальные углы вычисляют в виде arctg[(UVy)i/(UVx)i], предварительно определяют плотность и скорость звука в придонном слое воды ρ1, C1 и в грунте ρ2, С2; соответственно, затем размещают приемники колебательной скорости на расстоянии от дна, не превышающем длину волны в воде на рабочей частоте сигнала, и осуществляют акустическое зондирование, а вертикальные углы β вычисляют по формуле:
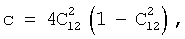
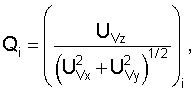
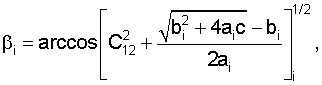 где
где 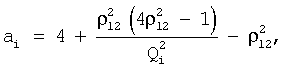

В заявленном способе акустического зондирования морской среды в условиях шельфовой зоны общими существенными признаками для него и для его прототипа являются:
- излучение сложного сигнала;
- прием сложного сигнала в удаленной точке тремя идентичными по чувствительности ортогонально ориентированными в пространстве приемниками колебательной скорости (ПКС) Vx, Vy, Vz, имеющими единый фазовый центр;
- вычисление свертки принятого и излученного сигналов на выходе каждого ПКС;
- определение для каждого i-го фрагмента сигнала, выделенного во времени, максимумов напряжения соответствующих каналов приемников колебательной скорости (UVx)i(UVy)i(UVz)i;
- вычисление по соответствующим максимумам напряжения горизонтальных и вертикальных углов, причем горизонтальные углы вычисляют в виде arctg[(UVy)i/(UVz)i].
Сопоставительный анализ существенных признаков заявленного способа акустического зондирования морской среды в условиях шельфовой зоны и прототипа показывает, что первый, в отличие от прототипа, имеет следующие отличительные признаки:
- предварительно определяют плотность и скорость звука в придонном слое воды ρ1, C1 и в грунте ρ2, С2 соответственно;
- приемники колебательной скорости размещают на расстоянии от дна, не превышающем длину волны в воде на рабочей частоте сигнала;
- вертикальные углы β (углы скольжения) вычисляют по формуле:
 где
где
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые испрашивается правовая охрана. Именно такая совокупность существенных признаков заявляемого способа акустического зондирования морской среды в условиях шельфовой зоны позволила обеспечить повышение точности определения вертикальных углов скольжения в условиях шельфовой зоны и многолучевости с учетом влияния границы раздела вода - морское дно.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из известных технических решений и пригодно для использования.
Сущность заявленного изобретения поясняется чертежом, где показана функциональная схема устройства, реализующего заявляемый способ акустического зондирования морской среды в условиях шельфовой зоны. На чертеже приняты следующие обозначения: X, Y, Z - соответствующим образом ориентированные приемники колебательной скорости, 1 - блоки, осуществляющие процедуру свертки, 2 - блок формирования образца излученного сигнала, 3 - вычислитель горизонтального угла, 4 - вычислитель вертикального угла.
Заявляемый способ акустического зондирования морской среды в условиях шельфовой зоны осуществляют следующим образом.
Предварительно определяют плотность и скорость звука в придонном слое воды ρ1, С1 и в грунте ρ2, С2 соответственно, и размещают приемники колебательной скорости на расстоянии от дна, не превышающем длину волны в воде на рабочей частоте сигнала. Затем излучают сложный сигнал и производят зондирование. Сложный сигнал, излученный источником, распространяется в морской среде в условиях шельфовой зоны, многократно отражаясь от поверхности моря и морского дна. Суммарный сигнал, содержащий все многократно отраженные сигналы, принимается ортогонально ориентированными в пространстве приемниками колебательной скорости X, Y, Z. Принятые сигналы подаются на блоки 1 свертки, где сворачиваются либо посредством прямого вычисления корреляционной функции, либо через взаимный спектр с образцом излученного сигнала, формируемого блоком 2. Огибающие свертки с выходов каналов X, Y поступают в вычислитель 3 горизонтального угла, где для каждого i-го максимума огибающей (UVx)i,(UVу)i вычисляют горизонтальный (азимутальный) угол по формуле

Огибающие свертки с каналов X, Y, Z поступают в вычислитель 4 вертикального угла, где для каждого i-го максимума огибающей (UVx)i, (UVy)i, (UVz)i вычисляют вертикальный угол (угол места или угол скольжения) по формуле:
где 
В способе акустического зондирования морской среды в условиях шельфовой зоны, в отличие от прототипа, учитываются многократно отраженные сигналы и влияние донной границы раздела, вблизи которой размещены приемники колебательной скорости.
Использование данного способа акустического зондирования морской среды в условиях шельфовой зоны и многолучевости с учетом влияния границы раздела вода - морское дно позволило повысить точность определения вертикальных углов (углов скольжения).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ОКЕАНА | 2002 |
|
RU2221261C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311662C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2313803C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2011 |
|
RU2456635C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2311663C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2006 |
|
RU2313802C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452978C1 |
| Способ обнаружения объектов, находящихся в толще донного грунта, и определение их местоположения | 2017 |
|
RU2650842C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452977C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452979C1 |
Изобретение относится к гидроакустике и предназначено для исследования подводной обстановки и определения гидрофизических неоднородностей морской среды в условиях шельфовой зоны. Техническим результатом изобретения является повышение точности определения вертикальных углов (углов скольжения). Способ акустического зондирования морской среды в условиях шельфовой зоны заключается в предварительном определении плотности и скорости звука в придонном слое воды и в грунте, излучении сложного сигнала, приеме его в удаленной точке тремя идентичными по чувствительности ортогонально ориентированными в пространстве приемниками колебательной скорости Vx, Vy, Vz, имеющими единый фазовый центр и установленными на расстоянии от дна, не превышающем длину волны в воде на рабочей частоте сигнала. Далее вычисляют свертки принятого и излученного сигналов, определяют для каждого i-го фрагмента сигнала, выделенного во времени, максимумы напряжения в соответствующих каналах приемника колебательной скорости (UVx)i (UVy)i (UVz)i, вычисляют по ним горизонтальные и вертикальные углы по приведенным математическим соотношениям. 1 ил.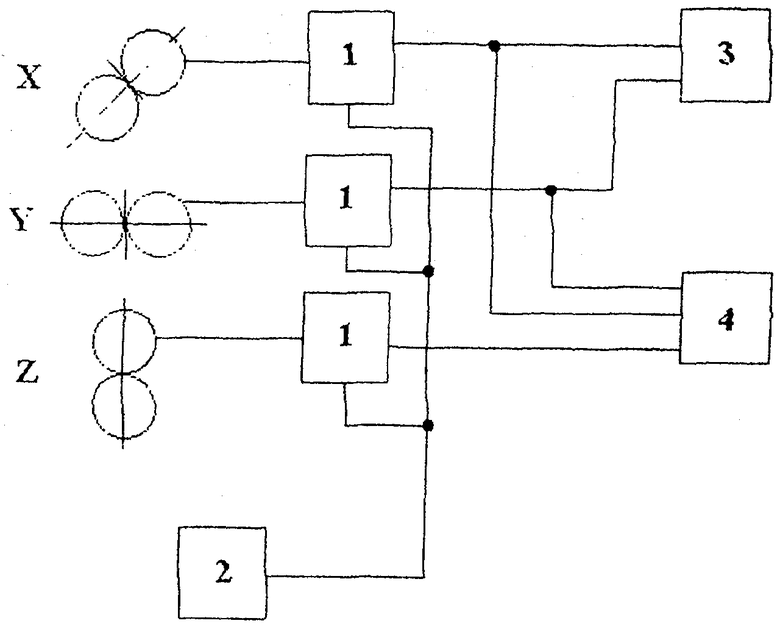
Способ акустического зондирования морской среды в условиях шельфовой зоны, в котором излучают сложный сигнал, затем принимают его в удаленной точке тремя идентичными по чувствительности ортогонально ориентированными в пространстве приемниками колебательной скорости Vx, Vy, Vz, имеющими единый фазовый центр, на выходе каждого приемника колебательной скорости вычисляют свертки принятого и излученного сигналов, для каждого i-го фрагмента сигнала, выделенного во времени, определяют максимумы напряжения соответствующих каналов приемников колебательной скорости (UVx)i, (UVy)i, (UVz)i, и вычисляют по ним горизонтальные и вертикальные углы, причем горизонтальные углы вычисляют в виде arctg[(UVy)i/(UVx)i], отличающийся тем, что предварительно определяют плотность и скорость звука в придонном слое воды ρ1, C1 и в грунте ρ2, С2, соответственно, затем размещают приемники колебательной скорости на расстоянии от дна, не превышающем длину волны в воде на рабочей частоте сигнала, и осуществляют акустическое зондирование, а вертикальные углы вычисляют по формуле
где 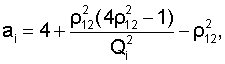
 ρ12=ρ1/ρ2, С12=С1/С2.
ρ12=ρ1/ρ2, С12=С1/С2.
| СПОСОБ АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ОКЕАНА | 2002 |
|
RU2221261C1 |
| Устройство для измерения параметров источников шума | 1981 |
|
SU953468A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| JP 62030975 А, 09.02.1987 | |||
| JP 5066273 A, 19.03.1993. | |||

