Изобретение относится к гидроакустике и предназначено для исследования подводной обстановки, в частности определения гидрофизических неоднородностей океана.
Известны и широко применяются в практике подводных исследований океана методы акустического зондирования гидрофизических неоднородностей (акустической томографии), построенные на принципе излучения сложного сигнала с частотной или фазовой модуляцией и приеме его в удаленной точке точечной (размеры много меньше длины волны) акустической антенной (Гаврилов А.Н. Об эксперименте "Arctic climate observation using underwater sound" - в книге Акустика океана. Сб. трудов школы-семинара акад. Л.М. Бреховских. - М.: ГЕОС, 1998. С. 10-15). При этом для повышения разрешения во времени при обработке выполняется свертка принятого сигнала с излученным. Это позволяет определять времена приходов зондирующего сигнала и по ним реконструировать картину распространения акустических волн, которая определяется гидрофизическими параметрами и неоднородностями среды. Недостатком способа является невозможность определения вертикальных и горизонтальных углов прихода зондирующих сигналов, что особенно важно в условиях многолучевости и, в частности, при размещении приемных систем вблизи дна.
С целью устранения этого недостатка предложен способ, в котором производят излучение сложного сигнала, прием зондирующего сигнала предварительно позиционированной протяженной вертикальной антенной решеткой, затем выполняют свертку принятого и зондирующего сигналов и определяют вертикальные углы прихода по временной задержке между элементами антенной решетки (Морозов А. К. Декомпозиция энергии шумоподобных фазоманипулированных сигналов, принимаемых многоэлементной антенной системой, на плоскости угол-задержка - в книге Акустика океана. Сб. трудов школы-семинара акад. Л.М. Бреховских. М.: ГЕОС, 1998. С. 37-41).
Недостатком данного способа, предлагаемого в качестве прототипа, является невозможность определения горизонтальных (азимутальных) углов прихода и сложность способа, возникающая из-за трудности позиционирования громоздкой приемной системы (протяженная вертикальная антенна) в реальных морских условиях. Это ограничивает возможности широкого использования способа в подводных исследованиях.
Техническая задача изобретения - одновременное определение как горизонтальных (азимутальных), так и вертикальных (угол места) углов прихода сигнала в условиях многолучевости при одновременном упрощении способа.
Поставленная задача достигается тем, что в способе, заключающемся в излучении сложного сигнала, приеме его в удаленной точке, вычислении свертки принятого и зондирующего сигналов, выделении фрагментов сигнала, разнесенных во времени, и определении вертикальных углов, прием осуществляют тремя идентичными по чувствительности ортогонально ориентированными в пространстве приемниками колебательной скорости (ПКС) Vx, VY, VZ, имеющими единый фазовый центр, на выходе каждого ПКС вычисляют свертку принятого и излученного сигналов, для каждого i-го фрагмента сигнала, выделенного во времени, определяют максимумы напряжения соответствующих каналов (UVx)i (UVy)i, (UVz)i, причем горизонтальный угол вычисляют в виде
arctg[(UVy)i/(UVx)i],
а вертикальный, как
arctg{(UVz)i/[(UVx)i 2+(UVy)i 2]0,5}.
При работе на стационарных трассах, когда общее направление на источник сигнала известно, для устранения неоднозначности определения направления прихода сигнала 0o/180, связанную дипольным характером диаграмм направленности (ДН) ПКС, приемную систему из трех ортогональных ПКС разворачивают в пространстве таким образом, чтобы центр одного из квадрантов, образованных максимумами чувствительности ПКС, был ориентирован в направлении линии кратчайшего расстояния между точками излучения и приема.
В случае, когда направления прихода заранее не известны (например, при развертывании точечной приемной системы с борта судна или самолета в океане), для устранения неоднозначности определения прихода 0o/180o, сигнал дополнительно принимают приемником звукового давления (ПД), имеющим единый фазовый центр со всеми ПКС, для каждого i-го фрагмента сигнала, выделенного во времени, сравнивают время регистрации максимумов напряжения в каждом из каналов колебательной скорости и канале давления, при совпадении времен регистрации, соответствующим величинам (UVx)i, (UVy)i, (UVz)i, присваивают знак "плюс", при несовпадении знак "минус", причем приемники фазируют так, чтобы в плоской звуковой волне фазы сигналов, пришедших со стороны положительных значений координатных осей X, Y, Z, на ПКС и ПД совпадали.
Предлагаемый способ обеспечивает одновременное определение как горизонтальных, так и вертикальных углов прихода зондирующего сигнала в условиях многолучевости и в свою очередь позволяет с большей точностью решать обратную задачу акустической томографии, то есть производить более точную реконструкцию подводной обстановки, гидрофизических параметров и неоднородностей среды, при этом использование точечной приемной системы, которая легко позиционируется в реальных морских условиях, значительно упрощает способ (размеры ПКС много меньше длины звуковой волны в среде, тогда как протяженная вертикальная антенна прототипа должна иметь размер в несколько длин волн).
Возможность определения углов прихода зондирующих сигналов с помощью приемников колебательной скорости известна (Гордиенко В.А., Ильичев В.И., Захаров Л.Н. Векторно-фазовые методы в акустике. М.: Наука, 1989), однако в условиях многолучевости она не реализуема из-за интерференции лучей, распространяющихся под разными углами. С другой стороны, определение углов прихода точечной приемной системой на основе приемника давления только за счет использования свертки зондирующего и приятого сигналов также невозможно (Морозов А. К. Декомпозиция энергии шумоподобных фазоманипулированных сигналов, принимаемых многоэлементной антенной системой, на плоскости угол-задержка - в книге Акустика океана. Сб. трудов школы-семинара акад. Л.М. Бреховских. М.: ГЕОС, 1998. С. 37-41).
В заявленном же решении за счет объединения разделения сигналов во времени по каждому из каналов ПКС и "векторно-фазовой" обработки свертки излученного и принятого сигналов удалось одновременно определить горизонтальный (азимутальный) и вертикальный (угол места) углы прихода зондирующего сигнала точечной приемной системой в условиях многолучевости.
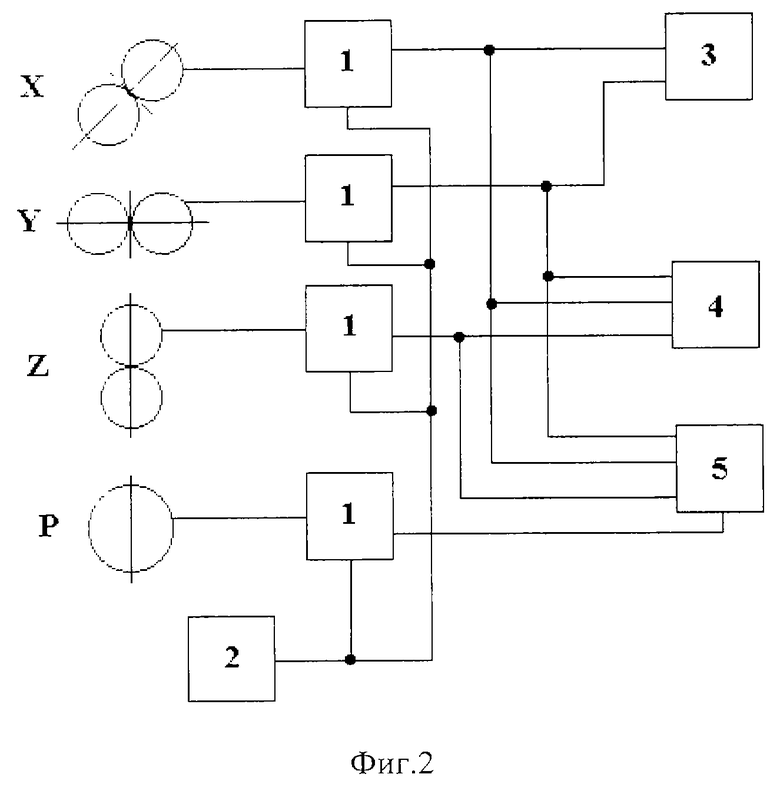
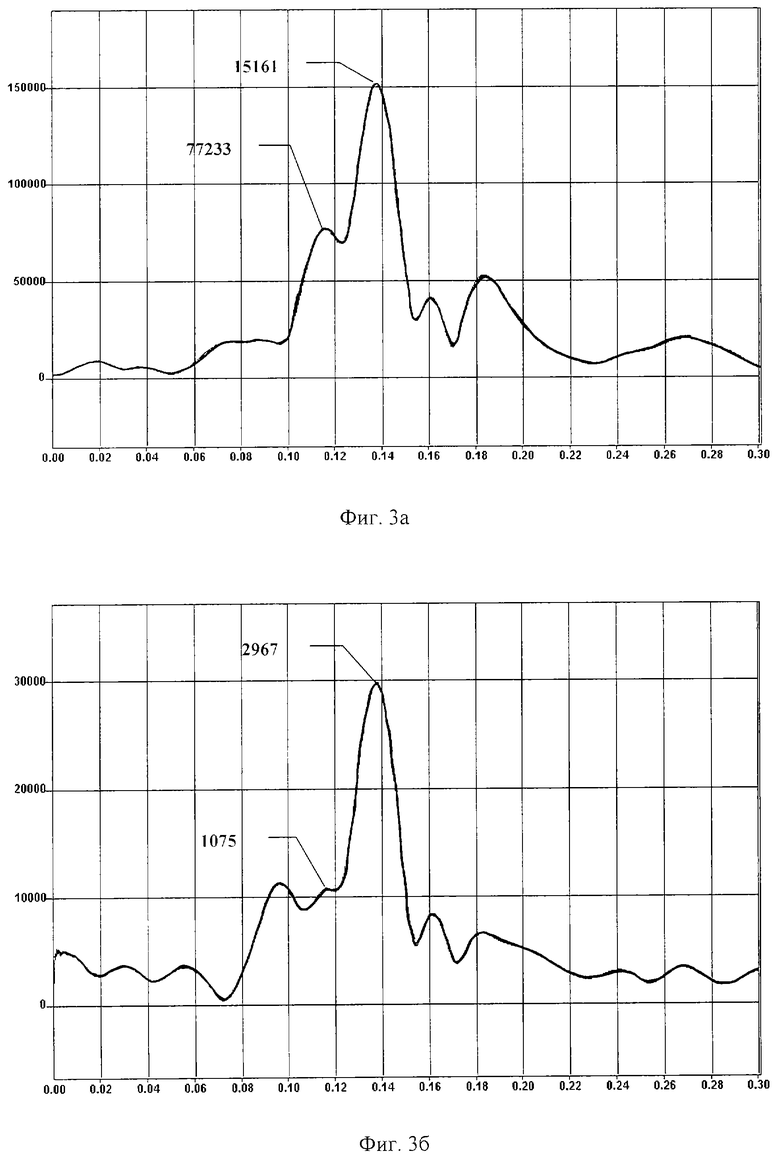
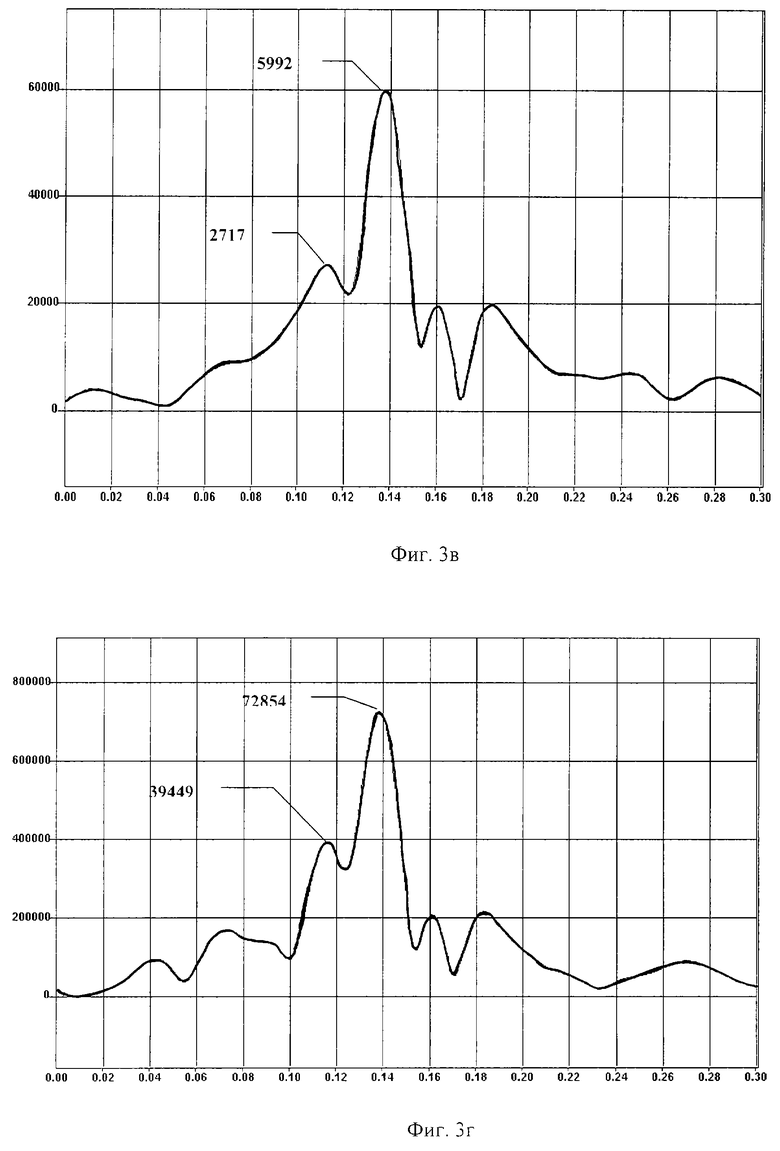
Для пояснения сущности предлагаемого изобретения на фиг.1 показана функциональная схема устройства, реализующего предлагаемый способ, где X, У, Z - соответствующим образом ориентированные приемники колебательной скорости (ПКС), 1 - блоки, осуществляющие процедуру свертки, 2 - блок формирования образца излученного сигнала, 3 - вычислитель азимутального пеленга, 4 - вычислитель угломестного пеленга. На фиг.2 показана функциональная схема устройства в случае, когда направления прихода неизвестны, где X, У, Z - соответствующим образом ориентированные приемники колебательной скорости (ПКС), Р - приемник давления (ПД), 1 - блоки, осуществляющие процедуру свертки, 2 - блок формирования образца излученного сигнала, 3 - вычислитель азимутального пеленга, 4 - вычислитель угломестного пеленга, 5 - вычислитель задержек откликов ПКС относительно ПД. На фиг.3 показаны отклики ПКС (X - фиг. 3а, Y - фиг.3б, Z - фиг.3в), приемника давления (Р - фиг.3г) в условиях многолучевости после выполнения свертки с излученным сигналом. На фиг.4 показаны наложенные друг на друга отклики каналов ПКС (Z) и ПД (Р). На фиг.5 приведена фотография изготовленной акустической приемной системы, содержащей три ПКС и ПД.
Предлагаемый способ осуществляют следующим образом. Сложный сигнал, излученный источником, принимается ортогонально ориентированными в пространстве приемниками колебательной скорости X, Y, Z (фиг.1). Принятые сигналы подаются на блоки свертки 1, где сворачиваются либо посредством прямого вычисления взаимной корреляционной функции, либо через взаимный спектр (Справочник по радиолокации. / Под ред. М. Сколника. М.: Сов. Радио. 1979. Т. 3. С.400) с образцом излученного сигнала, формируемым блоком 2. Огибающие свертки с каналов X, Y поступают в блок 3, где для каждого i-го максимума огибающей (UVx)i>(UVy)i, вычисляется азимутальный (горизонтальный) угол по формуле
arctg(UVy)i,/(UVx)i. (1)
Огибающие свертки с каналов X, Y, Z поступают в блок 4, где для каждого i-го максимума огибающей (UVx)i>(UVy)i, (UVz)i вычисляют угол места (вертикальный) по формуле
arctg{(UVz)i/(UVx)i 2+(UVy)i 2]0,5}. (2)
При работе на стационарных трассах, когда общее направление на источник сигнала известно, для устранения неоднозначности определения направления прихода 0o/180o, связанной с дипольным характером диаграмм направленности (ДН) ПКС, приемную систему при установке разворачивают таким образом, чтобы центр одного из квадрантов, образованных максимумами чувствительности ПКС, был ориентирован в направлении линии кратчайшего расстояния между точками излучения и приема. В этом случае раствор углов ±45o как для азимутальных, так и угломестных пеленгов (в который попадает абсолютное большинство лучей на достаточно протяженных трассах) перекрывается лепестками ДН ПКС одной полярности. Таким образом, горизонтальные и вертикальные углы прихода однозначно вычисляются по формулам (1, 2).
В более сложной ситуации, когда направления прихода заранее неизвестны (например, при развертывании точечной приемной системы с борта судна или самолета в океане), для устранения неоднозначности определения направления прихода 0o/180o в точечную приемную систему дополнительно вводят приемник давления (ПД) Р (фиг.2), имеющий единый фазовый центр с ПКС X, Y, Z. Огибающие свертки с каналов X, Y, Z и Р поступают в блок 5, где определяют задержки времени между максимумами свертки по ПКС и ПД. По достижению задержкой времени величины, равной половине периода несущей частоты излучаемого сигнала отклику, соответствующего ПКС, присваивается знак (-), в противном случае знак (+). Причем приемники фазируют так, чтобы в плоской звуковой волне фазы сигналов, пришедших со стороны положительных значений координатных осей X, Y, Z, на ПКС и ПД совпадали. Дело в том, что при приеме сигнала, фаза которого на ПД и ПКС совпадает (что соответствует одинаковой полярности ДН), задержка свертки между каналом ПКС и каналом ПД близка к нулю. В то же время при приеме сигнала, фаза которого на ПД и ПКС различна (что соответствует приему лепестком ДН ПКС противоположной, чем у ПД полярности), принятый сигнал оказывается в противофазе и при свертке с образцовым автоматически сдвигается на полпериода несущей частоты. Отсюда в свертке ПКС появляется сдвиг по времени (по сравнению с каналом ПД), равный половине периода несущей частоты.
Конструкция акустической приемной системы, содержащей 3 ортогональных ПКС и ПД, может быть выполнена различными способами (Скребнев Г.К. Комбинированные гидроакустические приемники. С.Петербург, Изд-во ЭЛМОР, 1997) в зависимости от требуемого диапазона частот и эксплуатационных параметров. Авторами использован вариант конструкции инерционного типа (фиг.5), который содержит трехкомпонентный акселерометр, установленный в сферическом воспринимающем элементе (⊘150 мм). Диапазон частот 200-500 Гц, чувствительность около 40 мкВ/Па на нижней границе диапазона. Данный датчик является приемником градиента давления. Поэтому для получения на его выходах колебательной скорости отклики каналов интегрируются. Сферический воспринимающий элемент подвешен внутри прямоугольного звукопрозрачного решетчатого корпуса (300•200•200 мм) на растяжках-амортизаторах. Приемник давления выполнен на отдельном обрезиненном цилиндрическом гидрофоне.
Для свертки сигналов может применяться самое разнообразное оборудование и программные средства. Авторами использована цифровая обработка сигналов на персональном компьютере в стандартном пакете программ DaDiSP. Сначала вычисляют мгновенные (выборочные) спектры принятого и образцового сигналов (быстрое преобразование Фурье), а затем определяется их взаимный спектр. После этого выполняют обратное преобразование Фурье, интегрирование (в пакете DaDiSP все это осуществляется макросом FCROSS(A,B), где А, В - серии данных), а результат подвергают преобразованию Гильберта с целью получения огибающей.
В качестве примера осуществления изобретения рассмотрим экспериментальные огибающие сверток принятого и излученного сигналов, показанные на фиг. 3. Эти результаты получены при излучении сложного фазоманипулированного сигнала, представляющего собой 511-ти символьные m-последовательности, с центральной частотой 366 Гц (полоса 45 Гц) пьезокерамическим излучателем, установленным на глубине 40 метров (высота над дном 1 м). ПКС располагались на удалении около 200 м от излучателя при заглублении 3 м. На фиг.3 в различных временных фрагментах выделяются несколько максимумов огибающей свертки, наблюдаемых практически одновременно по всем каналам X, Y, Z и Р. Рассмотрим 2 первых максимума, которые выделяются наиболее четко и характеризуют два различных прихода сложного зондирующего сигнала. Для канала Х их амплитуды в относительных единицах (по всем каналам одинаковых) составляют (Ux)1=77233, (Ux)2= 151611. Для канала Y (Uy)1=10756, (Uy)2=29679. Для канала Z (Uz)1= 27177, (Uz)1=59922. Для канала Р (Up)1=394492, (Up)2=728548. Чтобы определить азимутальные (горизонтальные) углы прихода ϕ воспользуемся формулой (1), откуда получаем
ϕ1 = arctg[(Uy)1/(Ux)1] = 7,9°;
ϕ2 = arctg[(Uy)2/(Ux)2] = 11,1°;
Для угла места (вертикальный угол) φ согласно формуле (2) получаем:
φ1 = arctg{(Uz)1/[(Ux)
φ2 = arctg{(Uz)
В случае необходимости определения знаков углов приходов, необходимо либо развернуть точечную систему центром одного из квадрантов, образованных ДН ПКС на источник сигнала либо сравнить времена регистрации первого и второго максимумов вертикально ориентированного ПКС - канал Z (фиг.2) с ПД - канал Р. Это удобно сделать, наложив графики огибающих свертки обоих каналов (фиг. 3в и фиг. 3г соответственно) и представив их в виде фиг.4. На фиг.4 хорошо видно, что вторые максимумы огибающих свертки наблюдаются практически синхронно в обоих каналах. В то же время первый максимум огибающей свертки канала Z заметно опережает соответствующий максимум канала Р. Задержка между ними составляет около 2 мсек. Для используемой частоты излучения половина периода несущей частоты (366 Гц) составляет 1,4 мсек, что близко к наблюдаемому значению. Таким образом, если фазу сигнала, принимаемого ПД, считать положительной, то для канала Z первый приход принят с отрицательного направления (полярности) дипольной ХН, а второй - с положительного. Отсюда следует, что для угломестных (вертикальных) углов мы должны записать φ1 = -19,2°; φ2 = +21,2°.
Использование предлагаемого способа позволяет определять углы прихода сигнала при акустическом зондировании океана в условиях многолучевости и при этом избавляет от необходимости использования сложных протяженных приемных систем, что расширяет возможности эффективного применения акустической томографии в задачах динамического наблюдения за подводной обстановкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ В УСЛОВИЯХ ШЕЛЬФОВОЙ ЗОНЫ | 2005 |
|
RU2302014C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ШУМЯЩИЙ ОБЪЕКТ | 2010 |
|
RU2444747C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ГЕОАКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ В ЗВУКОВОМ ДИАПАЗОНЕ ЧАСТОТ | 2013 |
|
RU2559516C2 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2308054C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЦЕЛЕЙ ПО ГИДРОЛОКАЦИОННЫМ СИГНАЛАМ | 2008 |
|
RU2368919C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ В РЕЖИМЕ ШУМОПЕЛЕНГОВАНИЯ | 1977 |
|
SU1840066A1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |

Изобретение относится к гидроакустике и предназначено для исследования подводной обстановки, в частности определения гидрофизических неоднородностей океана. В заявленном способе излучают сложный сигнал, принимают его в удаленной точке тремя идентичными по чувствительности, ортогонально ориентированными в пространстве приемниками колебательной скорости (ПКС), имеющими единый фазовый центр, на выходе каждого ПКС вычисляют свертку принятого и излученного сигналов, выделяют фрагменты сигнала, разнесенных во времени, определяют для каждого i-го фрагмента сигнала, выделенного во времени, максимумы напряжения соответствующих каналов и определяют горизонтальный и вертикальный углы по математическим выражениям. Достигаемым техническим результатом изобретения является одновременное определение как горизонтальных, так и вертикальных углов прихода сигнала в условиях многолучевости при одновременном упрощении способа. 5 ил.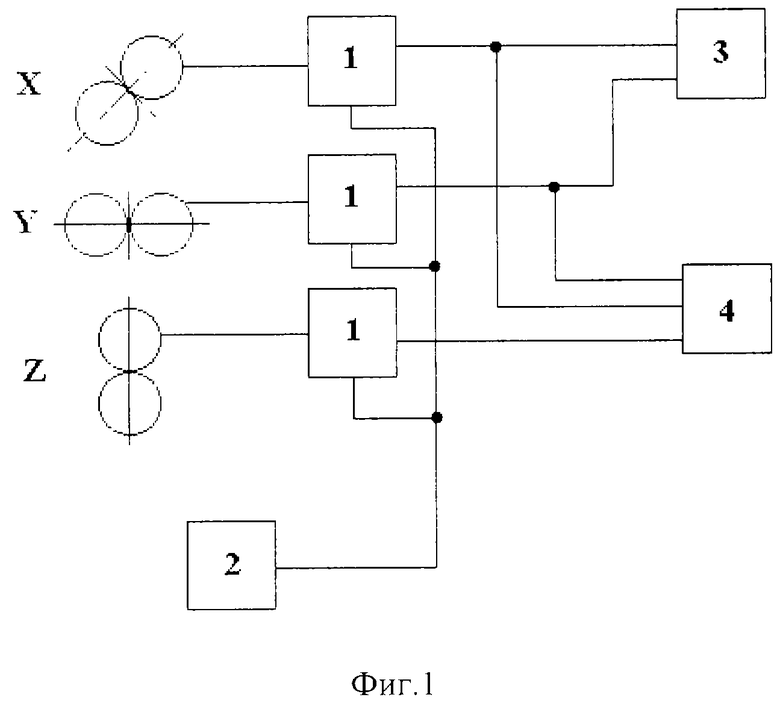
arctg[(Uvy)i/(Uvx)i],
а вертикальный в виде
arctg{(UVz)i/[(UVx)
| Акустика океана | |||
| Сборник трудов школы-семинара акад | |||
| Л.М | |||
| БРЕХОВСКИХ | |||
| - М.: ГЕОС, 1998, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039368C1 |
| Устройство для измерения параметров источников шума | 1981 |
|
SU953468A1 |
| US 4924448, 08.05.1990 | |||
| US 4924449, 08.05.1990 | |||
| DE 19626865 A1, 08.01.1998. | |||

