Изобретение относится к области гидроакустики и может быть использовано при разработке средств поиска объектов, находящихся на дне под слоем грунта и невидимых для таких гидролокационных средств, как гидролокатор бокового обзора.
Известен способ обнаружения объекта, находящегося в толще донного грунта, который реализуется гидролокационным комплексом, содержащим гидролокатор бокового обзора, используемый на первом этапе работы, и акустический профилограф, который используется на втором этапе работы (А.В. Булыгин, Я В. Моисеенко, А.В. Мочалов, Ю.А. Рыклин «Опыт применения акустического профилографа в подводной археологии» Труды VIII международной конференции Прикладные технологии гидроакустики и гидрофизики. С.-Петербург, «Наука», 2006, с. 147-150). В данном способе обнаружения объекта, находящегося в толще донного грунта, на первом этапе работы с носителя гидролокационной аппаратуры излучают антенной гидролокатора бокового обзора в водную среду импульсный акустический сигнал в широком диапазоне углов скольжения. Затем принимают от находящегося в толще донного грунта объекта отраженный в обратном направлении акустический сигнал той же акустической антенной, измеряют время t распространения акустического сигнала туда и обратно, вычисляют расстояние r до объекта, отображают пространственно-временное положение объекта, используя движение носителя гидролокационной аппаратуры относительно предполагаемого местоположения объекта, и визуально определяют на гидролокационном изображении дна, полученном с помощью гидролокатора бокового обзора, возможное местоположение объекта, находящегося в толще донного грунта. На втором этапе работы, используя движение носителя гидролокационной аппаратуры, повторно выходят на место предполагаемого расположения объекта, находящегося в толще донного грунта, излучают акустической антенной акустического профилографа в водную среду в сторону грунта импульсный акустический сигнал в вертикальном направлении. Затем принимают отраженный от находящегося в толще донного грунта объекта акустический сигнал той же акустической антенной, измеряют время t распространения туда и обратно акустического сигнала, вычисляют глубину Z объекта, находящегося в толще донного грунта, и отображают пространственно - временное положение объекта, находящегося в толще донного грунта, и отображают пространственно-временное положение объекта, находящегося в толще донного грунта, в вертикальной плоскости.
Недостатком такого способа обнаружения объекта, находящегося в толще донного грунта, является большая вероятность пропуска объектов, находящихся под слоем грунта, но не выходящих на поверхность дна. Другим недостатком является малая эффективность поиска, связанная с двухэтапным режимом поиска, т.е. с необходимостью использования акустического профилографа на втором этапе для повышения вероятности обнаружения объектов, находящихся в толще донного грунта.
Известен способ обнаружения объекта, находящегося в толще донного грунта, в котором акустическое зондирование верхнего слоя донного грунта осуществляют одновременно с зондированием поверхности морского дна локатором бокового обзора (Патент РФ №2280266 С2, МПК G01S 15/04, опубл. 20.07.2006 г., Бюл. №20). Для этого на носителе гидролокационной аппаратуры устанавливают приемопередающую антенну гидролокатора бокового обзора и дополнительные направленные в вертикальной плоскости излучающую и приемную акустические антенны, работающие синхронно с приемопередающей антенной гидролокатора бокового обзора. Затем, перемещая носитель гидролокационной аппаратуры над дном, излучают приемопередающей антенной гидролокатора бокового обзора в водную среду в сторону дна импульсный акустический сигнал, принимают отраженный от объекта, находящегося в толще донного грунта, в обратном направлении акустический сигнал той же акустической антенной, измеряют время t распространения туда и обратно акустического сигнала и отображают пространственно-временное положение объекта. Синхронно с излучением антенны гидролокатора бокового обзора излучают в водную среду импульсный акустический сигнал дополнительной направленной в вертикальной плоскости антенной под углом падения

где ρ12=ρ1/ρ2, C12=C1/C2, ρ1, ρ2, C1, С2 - плотность и скорость звука в воде и грунте соответственно,
принимают от находящегося в толще донного грунта объекта и переизлученный в водную среду акустический сигнал направленной в вертикальной плоскости дополнительной приемной акустической антенной под критическим углом приема θnp=arcsinC12, перемещают направленную в вертикальной плоскости дополнительную излучающую антенну на высоте Z1 над дном, связанной с глубиной Z2 предполагаемого местонахождения объекта в толще донного грунта соотношением Z1=Z2/ρ12, и вычисляют расстояние r до объекта по формуле
Данный способ обнаружения объекта, находящегося в толще донного грунта, является наиболее близким к заявляемому способу и принят за прототип.
Недостатком указанного способа является малая дальность действия и малая глубина проникновения звуковой волны в грунт на рабочих частотах локатора бокового обзора. Это связано с тем, что грунтовая волна, которая возбуждается в составе придонной волны пограничного типа и используется в этом способе в качестве информативной составляющей, достаточно быстро затухает с расстоянием и с глубиной в донном грунте.
Задачей настоящего изобретения является разработка способа обнаружения объекта, находящегося в толще донного грунта, позволяющего увеличить глубину проникновения звуковой волны в грунт и дальность действия при сохранении высокой разрешающей способности по дальности и угловому положению объекта.
Поставленная задача решается тем, что в способе обнаружения объекта, находящегося в толще донного грунта, при котором с носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приемной системой отраженный от находящегося в толще донного грунта объекта акустический сигнал, измеряют время t1 распространения акустического сигнала от излучателя до приемной системы, вычисляют расстояние от приемной системы до объекта, перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем над дном относительно предполагаемого местоположения объекта на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местонахождения объекта в толще грунта соотношением Z1ρ1=Z2ρ2 (ρ1, ρ2 - плотность водной среды и грунта соответственно), и отображают пространственно-временное положение объекта, используют в качестве приемной системы установленный на дно акустический комбинированный приемник, содержащий канал звукового давления, три ортогональных канала вектора колебательной скорости и датчик углового положения локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат,
используют в качестве импульсного акустического сигнала низкочастотный (λ>Z2, λ - длина волны) фазоманипулированный сигнал,
перемещают носитель гидролокационной аппаратуры с излучателем по круговой траектории, в центре которой находится приемная система,
формируют в режиме приема статический веер характеристик направленности, содержащий 8 горизонтальных односторонне направленных пространственных каналов, сдвинутых друг относительно друга на 45°,
измеряют в n-м пространственном канале (n=1-8), ориентированном на носитель гидролокационной аппаратуры с излучателем, время распространения t1 акустического сигнала от излучателя до приемной системы, используя для повышения точности измерения времени распространения корреляционные алгоритмы обработки принятого фазоманипулированного сигнала,
измеряют в (m)-м пространственном канале (m=1-8), ориентированном на находящийся в толще донного грунта объект, сдвинутом на 180° относительно n-го пространственного канала (n=1-8), ориентированного на носитель гидролокационной аппаратуры с излучателем, время распространения t2 акустического сигнала от излучателя до находящегося в толще донного грунта объекта и от объекта до приемной системы, используя для повышения точности измерения времени распространения корреляционные алгоритмы обработки принятого фазоманипулированного сигнала,
определяют горизонтальное расстояние от находящегося в толще донного грунта объекта до приемной системы, координаты которой считаются известными, по формуле

где c1, с2 - скорость звука в придонном слое воды и в грунте соответственно,
вычисляют горизонтальные компоненты вектора интенсивности Iх, Iу в локальной системе координат, связанной с комбинированным приемником,
вычисляют в локальной системе координат, связанной с комбинированным приемником, пеленг на находящийся в грунте объект по формуле
ϕлок=arctg(Iy/Ix),
пересчитывают пеленг, измеренный в локальной системе координат, связанной с комбинированным приемником, в географическую систему координат по формуле
ϕгео=ϕо-ϕлок,
где ϕ0 - угол поворота локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат, измеряемый датчиком углового положения,
и определяют местоположение объекта, находящегося в толще донного грунта, координатами (r, ϕгео), измеренными относительно приемной системы, координаты которой считаются известными.
В заявленном способе обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения общими существенными признаками для него и для прототипа являются:
- излучают акустической антенной в водную среду импульсный акустический сигнал,
- принимают отраженный от объекта, находящегося в толще донного грунта, отраженный акустический сигнал,
- измеряют время распространения акустического сигнала туда и обратно, вычисляют расстояние до объекта,
- перемещают носитель гидроакустической аппаратуры с излучателем над дном относительно предполагаемого местонахождения объекта,
- перемещают излучатель над дном на расстоянии Z1, связанном с глубиной залегания объекта Z2 соотношением Z1ρ1=Z2ρ2 (ρ1,ρ2 - плотность водной среды и грунта соответственно),
- отображают пространственно-временное положение объекта.
Отличительными признаками заявленного способа обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения являются:
- используют в качестве приемной системы установленный на дно акустический комбинированный приемник, содержащий канал звукового давления, три ортогональных канала вектора колебательной скорости и датчик углового положения локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат,
- используют в качестве импульсного акустического сигнала низкочастотный (λ≥Z2, λ - длина волны) фазоманипулированный сигнал,
- носитель гидролокационной аппаратуры с излучателем перемещают по круговой траектории, в центре которой находится приемная система,
- формируют в режиме приема статический веер характеристик направленности, содержащий 8 горизонтальных односторонне направленных пространственных каналов, сдвинутых друг относительно друга на 45°,
- измеряют в n-м пространственном канале(n=1-8), ориентированном на носитель гидролокационной аппаратуры с излучателем, время распространения t1 акустического сигнала от излучателя до приемной системы,
- измеряют в (m)-м пространственном канале (m=1-8), ориентированном на находящийся в толще донного грунта объект, сдвинутом на 180° относительно n-го пространственного канала (n=1-8), ориентированного на носитель гидроакустической аппаратуры с излучателем, время распространения t2 акустического сигнала от излучателя до находящегося в толще донного грунта объекта и от объекта до приемной системы,
- определяют горизонтальное расстояние от находящегося в толще донного грунта объекта до приемной системы, координаты которой считаются известными, по формуле
где c1, c2 - скорость звука в придонном слое воды и в грунте соответственно,
- вычисляют горизонтальные компоненты вектора интенсивности Iх, Iу в локальной системе координат, связанной с комбинированным приемником,
- вычисляют в локальной системе координат, связанной с комбинированным приемником, пеленг на находящийся в грунте объект по формуле
ϕлок=arctg(Iy/Ix),
- пересчитывают пеленг, измеренный в локальной системе координат, связанной с комбинированным приемником, в географическую систему координат по формуле
ϕгео=ϕо-ϕлок,
где ϕ0 - угол поворота локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат, измеряемый датчиком углового положения,
- определяют местоположение объекта, находящегося в толще донного грунта, координатами (r, ϕгео), измеренными относительно приемной системы, координаты которой считаются известными.
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые испрашивается правовая охрана. Именно такая совокупность существенных признаков заявленного способа позволила:
- обнаруживать любые объекты, находящиеся в толще донного грунта, даже если они не выходят на поверхность, за счет понижения рабочей частоты, увеличения глубины проникновения звуковой волны в грунт,
- повысить эффективность поиска и обнаружения объектов, находящихся в толще донного грунта за счет понижения рабочей частоты, увеличения глубины проникновения звуковой волны в грунт и увеличения дальности обнаружения,
- повысить помехоустойчивость приемной системы и эффективность способа за счет использования комбинированного приемника, в котором сформированы восемь пространственных каналов в горизонтальной плоскости,
- обеспечить высокую точность определения времени распространения за счет использования фазоманипулированного сигнала и корреляционных алгоритмов обработки сигналов в режиме приема,
- обеспечить высокую точность пеленгования объекта за счет использования в качестве приемной системы комбинированного приемника, снабженного датчиком углового положения,
- обеспечить высокую точность определения местоположения объекта за счет увеличения точности пеленгования и определения времени распространения,
- обеспечить отображение положения обнаруженных объектов, находящихся в толще донного грунта, в горизонтальной плоскости на материальном носителе.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из известного уровня техники и пригодно для использования.
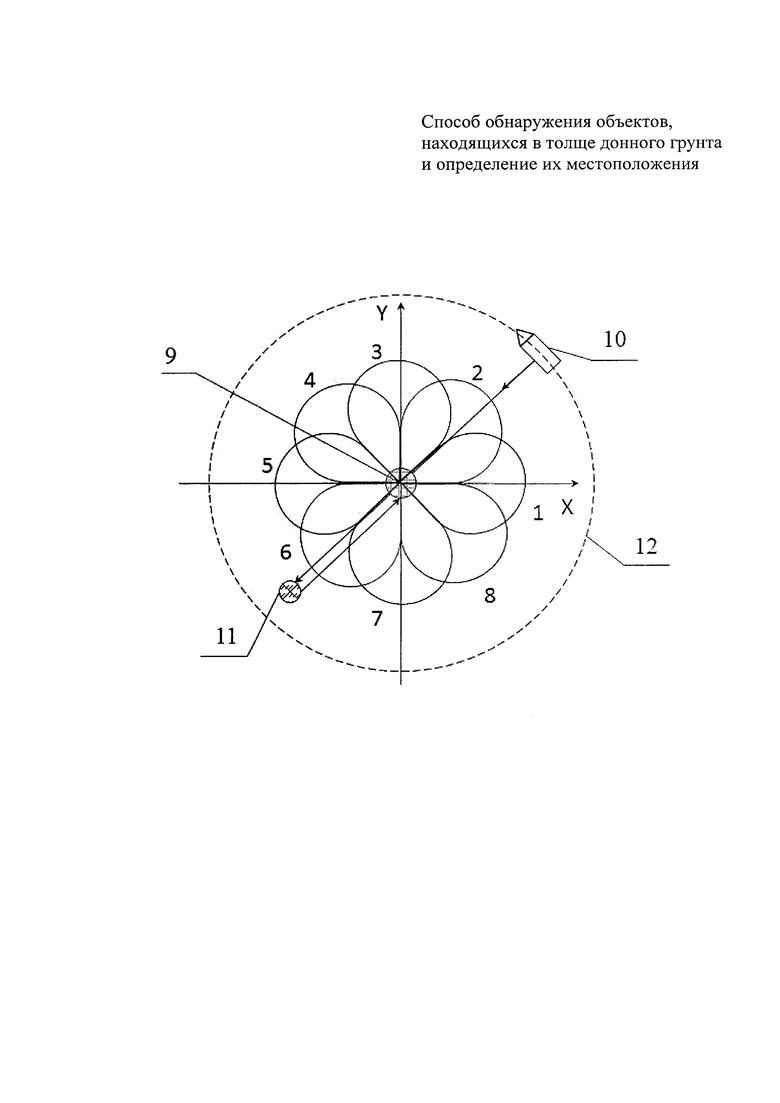
Заявленный способ обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения поясняется чертежом, где представлена схема движения носителя гидролокационной аппаратуры с излучателем относительно приемной системы и объекта, находящегося в толще донного грунта.
На чертеже приняты следующие обозначения.
1-8 8-канальный статический веер характеристик направленности приемной системы,
9 - приемная система, установленная на дно,
10 - носитель гидролокационной аппаратуры с излучателем,
11 - объект, находящийся в толще донного грунта,
12 - круговая траектория движения носителя гидролокационной аппаратуры с излучателем.
Заявленный способ реализуется следующим образом.
После постановки приемной системы 9 на дно и определения ее местоположения носитель гидролокационной аппаратуры с излучателем 10, в качестве которого может быть использовано либо надводное судно, либо автономный подводный аппарат, работающий по заданной программе, движется по круговой траектории 12, в центре которой находится приемная система. При движении по круговой траектории расстояние от излучателя до морского дна Z1 и предполагаемая глубина залегания объекта Z2 в толще донного грунта должны удовлетворять условию Z1ρ1=Z2ρ2.
В приемной системе, оснащенной комбинированным приемником и датчиком углового положения, формируется по известным алгоритмам 8-канальный статический веер односторонне направленных характеристик направленности, перекрывающих весь диапазон изменения азимутального угла. При излучении импульсного фазоманипулированного сигнала в момент времени t0 он принимается в момент времени t1 в пространственном канале комбинированного приемника, ориентированном на излучатель под углом ϕn (n=1-8). [Б.А. Касаткин и др. Моделирование направленных свойств комбинированного приемника при смешанных алгоритмах обработки сигналов. Труды шестой всероссийской научно-технической конференции «Технические проблемы освоения мирового океана». Владивосток, 2015, с. 171-175].
Часть энергии звуковой волна проникает в грунт в виде придонной волны, локализованной на горизонте Z2 в толще донного грунта, связанном с расстоянием от излучателя до морского дна Z1 соотношением Z1ρ1=Z2ρ2. Часть энергии звуковой волны, проникшей в грунт, распространяется далее и, отражаясь от объекта 11, принимается приемной системой в момент времени в пространственном канале, ориентированном под углом ϕn+180°.
В момент приема вычисляются горизонтальные компоненты вектора интенсивности Iх, Iу в локальной системе координат, связанной с комбинированным приемником, определяется пеленг на объект в локальной системе координат, связанной с комбинированным приемником,
ϕлок=arctg(Iу/Iх),
который затем пересчитывается в пеленг относительно географической системы координат по формуле ϕгео=ϕо-ϕлок,
где ϕ0 - угол поворота локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат, измеряемый датчиком углового положения,
Координаты (r, ϕгео) определяют положение объекта относительно приемной системы, координаты которой определяются в момент постановки и считаются известными.
При необходимости приемная система снабжается радиоканалом связи с судном - носителем гидролокационной аппаратуры, вся первичная информация передается по радиоканалу на судно-носитель, а результаты обработки отображаются на мониторе в реальном времени.
Изобретение относится к области гидроакустики и может быть использовано при разработке средств поиска объектов, находящихся на дне под слоем грунта и невидимых для таких гидролокационных средств, как гидролокатор бокового обзора. Техническим результатом является увеличение глубины проникновения звуковой волны в грунт и дальности действия при сохранении высокой разрешающей способности по дальности и угловому положению объекта. С носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приемной системой отраженный от находящегося в толще донного грунта объекта акустический сигнал, измеряют время распространения акустического сигнала от излучателя до приемной системы, вычисляют расстояние от приемной системы до объекта, перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем над дном относительно предполагаемого местоположения объекта на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местонахождения объекта в толще грунта, соотношением Z1ρ1=Z2ρ2 (ρ1, ρ2 - плотность водной среды и грунта соответственно) и отображают пространственно-временное положение объекта, при этом используют в качестве приемной системы донный акустический комбинированный приемник, для увеличения дальности действия и глубины проникновения звуковой волны в грунт в качестве импульсного акустического сигнала используют низкочастотный (λ≥Z2, λ - длина волны) фазоманипулированный сигнал, а носитель гидролокационной аппаратуры с излучателем перемещают по круговой траектории, в центре которой находится приемная система. Использование низкочастотного фазоманипулированного сигнала в режиме излучения и корреляционных алгоритмов обработки принятого сигнала позволяет сохранить высокую разрешающую способность по дальности, а для увеличения помехоустойчивости приемной системы, дальности действия и высокой разрешающей способности по угловой координате формируют в режиме приема статический веер характеристик направленности, содержащий 8 горизонтальных односторонне направленных пространственных каналов, сдвинутых друг относительно друга на 45°, измеряют в n-м пространственном канале, ориентированном на носитель гидролокационной аппаратуры с излучателем, время распространения акустического сигнала от излучателя до приемной системы, измеряют в пространственном канале, ориентированном на находящийся в толще донного грунта объект, время распространения акустического сигнала от излучателя до находящегося в толще донного грунта объекта и от объекта до приемной системы, используя для повышения точности измерения времени распространения корреляционные алгоритмы обработки принятого фазоманипулированного сигнала, определяют горизонтальное расстояние от находящегося в толще донного грунта объекта до приемной системы, координаты которой считаются известными, вычисляют горизонтальные компоненты вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, вычисляют в локальной системе координат, связанной с комбинированным приемником, пеленг на находящийся в грунте объект, пересчитывают пеленг, измеренный в локальной системе координат, связанной с комбинированным приемником, в географическую систему координат и определяют местоположение объекта, находящегося в толще донного грунта, координатами (r, ϕгео), измеренными относительно приемной системы, координаты которой считаются известными. 1 ил.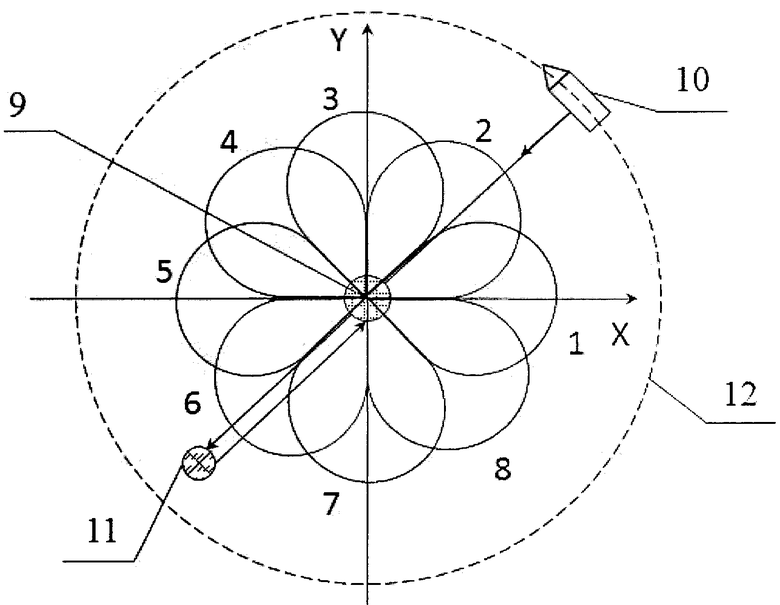
Способ обнаружения объектов, находящихся в толще донного грунта, и определения их местоположения, при котором с носителя гидролокационной аппаратуры излучают гидроакустическим излучателем в водную среду импульсный акустический сигнал, принимают приемной системой отраженный от находящегося в толще донного грунта объекта акустический сигнал, измеряют время распространения акустического сигнала от излучателя до приемной системы, вычисляют расстояние от приемной системы до объекта, перемещают носитель гидролокационной аппаратуры с гидроакустическим излучателем над дном относительно предполагаемого местоположения объекта на расстоянии от дна Z1, связанном с глубиной Z2 предполагаемого местонахождения объекта в толще грунта соотношением Z1ρ1=Z2ρ2 (ρ1, ρ2 - плотность водной среды и грунта соответственно), и отображают пространственно-временное положение объекта, отличающийся тем, что в качестве приемной системы используют установленный на дно комбинированный акустический приемник, содержащий канал звукового давления, три ортогональных канала вектора колебательной скорости и датчик углового положения локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат; в качестве импульсного акустического сигнала используют низкочастотный (λ≥Z2, λ - длина волны) фазоманипулированный сигнал, перемещают носитель гидролокационной аппаратуры с излучателем по круговой траектории, в центре которой находится приемная система, формируют в режиме приема статический веер характеристик направленности, содержащий 8 горизонтальных односторонне направленных пространственных каналов, сдвинутых друг относительно друга на 45°, измеряют в n-м пространственном канале (n=1-8), ориентированном на носитель гидролокационной аппаратуры с излучателем, время распространения t1 акустического сигнала от излучателя до приемной системы, используя для повышения точности измерения времени распространения корреляционные алгоритмы обработки принятого фазоманипулированного сигнала, измеряют в m-м пространственном канале (m=1-8), ориентированном на находящийся в толще донного грунта объект, сдвинутом на 180° относительно n-го пространственного канала (n=1-8), ориентированного на носитель гидролокационной аппаратуры с излучателем, время распространения t2 акустического сигнала от излучателя до находящегося в толще донного грунта объекта и от объекта до приемной системы, используя для повышения точности измерения времени распространения корреляционные алгоритмы обработки принятого фазоманипулированного сигнала, определяют горизонтальное расстояние от находящегося в толще донного грунта объекта до приемной системы по формуле:
 ;
;  ,
,  ,
,
где c1, c2 - скорость звука в придонном слое воды и в грунте соответственно, вычисляют горизонтальные компоненты вектора интенсивности Ix, Iy в локальной системе координат, связанной с комбинированным приемником, вычисляют пеленг на находящийся в грунте объект в локальной системе координат, связанной с комбинированным приемником, по формуле:
 ,
,
пересчитывают пеленг, измеренный в локальной системе координат, связанной с комбинированным приемником, в географическую систему координат по формуле:

где  - угол поворота локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат, измеряемый датчиком углового положения, и определяют местоположение объекта, находящегося в толще донного грунта, координатами (r,
- угол поворота локальной системы координат, связанной с комбинированным приемником, относительно географической системы координат, измеряемый датчиком углового положения, и определяют местоположение объекта, находящегося в толще донного грунта, координатами (r,  ), измеренными относительно приемной системы, координаты которой считаются известными.
), измеренными относительно приемной системы, координаты которой считаются известными.
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| US 6600441 B2, 29.07.2003 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| JP 2001330659 A, 30.11.2001. | |||

