Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах обнаружения и определения местоположения источников радиоизлучения.
Для однозначного определения в круговом азимутальном секторе направления распространения электромагнитных волн (ЭМВ) S, совпадающего при прямолинейном распространении ЭМВ с направлением на источник радиоизлучения (ИРИ), широко используются фазочувствительные (ФЧ) способы пеленгования [1. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964. - 640 с.]; [2. Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь, 1997. - 160 с.]. Сущность ФЧ способов пеленгования заключается в необходимости проведения оценки пространственно-временной структуры электромагнитного поля (ЭМП), создаваемого ИРИ, в плоскости пеленгования (азимутальной плоскости) по крайней мере в трех пространственно разнесенных точках, что наиболее просто технически реализуется путем использования плоской трехэлементной эквидистантной кольцевой антенной решетки (КАР), состоящей из ненаправленных в азимутальной плоскости идентичных антенных элементов (АЭ). В качестве АЭ с указанными свойствами используются осесимметричные антенны вибраторного типа, оси симметрии которых ортогональны плоскости расположения КАР, а фазовые центры расположены равномерно на окружности радиуса rcaw (caw - сокращение от английского слова "circular arrays with" (кольцевая антенная решетка)).
Физической основой ФЧ способов радиопеленгования, как известно [1], являются следующие свойства ЭМВ в зоне излучения: постоянство амплитуды составляющих напряженности электромагнитного поля в пределах апертуры (базы) КАР и плоский фазовый фронт ЭМВ, нормаль к которому совпадает с направлением на ИРИ. В общем случае точность пеленгования характеризуется эксплуатационной угловой ошибкой пеленгатора, которая включает в себя инструментальные ошибки, характеризующие точность самого пеленгатора-угломера, являющиеся, как правило, систематическими, и ошибки от других источников, которые проявляются в реальной эксплуатации пеленгатора, являющиеся, как правило, случайными. В целом ряде случаев достаточно точное разделение ошибок пеленгования на случайную и систематическую составляющие не представляется возможным. Поэтому практически всегда без особой погрешности эксплуатационная точность пеленгования может быть охарактеризована результирующей средней квадратической ошибкой (СКО) σθ в азимутальной плоскости, определяемой через дисперсии систематической  и случайной
и случайной  составляющих в соответствии с выражением:
составляющих в соответствии с выражением:

Систематическая составляющая СКО σθs применительно к ФЧ пеленгаторам, в свою очередь, включает методическую и структурную составляющие ошибок. Методические составляющие ошибок, связанные со способом пеленгования, обусловлены локальной неоднородностью ЭМП на раскрыве КАР, приводящей к искажениям форм диаграмм направленности (ДН) антенн КАР. Структурные составляющие ошибок, связанные с технической реализацией пеленгаторов, обусловлены неидентичностью каналов пеленгатора, нарушением симметрии структуры КАР, монтажно-установочными погрешностями.
Случайная составляющая СКО σθr обусловлена воздействием внутренних шумов и внешних помех.
При этом основными показателями качества разрабатываемых способов радиопеленгования являются обеспечиваемые способом пеленгования методическая составляющая систематической СКО и предельная чувствительность, определяемая, согласно [3. ГОСТ 23288-78. Радиопеленгаторы. Термины и определения. - М.: Издательство стандартов, 1979. - 6 с.], "минимальной напряженностью электромагнитного поля, создаваемого пеленгуемым объектом в месте установки антенны радиопеленгатора, при котором обеспечивается индикация радиопеленга с заданной точностью и вероятностью". Поэтому для анализа известных способов радиопеленгования и устройств, их реализующих, основанных на использовании плоских трехэлементных эквидистантных КАР, будем считать, что: во-первых, структурные составляющие ошибок пеленгования устранены известными методами (путем калибровки каналов, соответствующей ориентацией в пространстве КАР, обеспечения симметрии структуры КАР и т.д.) и систематическая СКО σθs определяется только методической составляющей; во-вторых, случайная составляющая СКО σθr, определяющая предельную чувствительность пеленгатора, обусловлена воздействием внутренних шумов пеленгационного измерителя, неизбежно присутствующих при реализации способов пеленгования [1], [2]. Естественно, что при воздействии внешних помеховых сигналов результирующая СКО σθ пеленгатора, в общем случае, ухудшается, и результаты пеленгования становятся не достоверными, что определяет необходимость анализа возможности известных способов пеленгования по оценке достоверности результатов пеленгования, то есть возможности выявления случаев пеленгования при наличии внешних помеховых сигналов.
Потенциальные возможности уменьшения случайной СКО σθr способов пеленгования, основанных на использовании плоской трехэлементной эквидистантной КАР радиуса rcaw, при равноточных измерениях (при одинаковых уровнях сигналов, наводимых в каждом из трех антенн КАР под воздействием ЭМП пеленгуемого ИРИ) и взаимно некоррелированных, распределенных по центрированному нормальному закону внутренних шумах каналов пеленгационного измерителя, приведенных к фазовым центрам антенн КАР, определяются с помощью известного неравенства Рао-Крамера [4. Левин Б.Р. Теоретические основы статистической радиотехники. Книга вторая. Издание 2-е, перераб. и дополн. - М.: Сов. радио, 1975, с.89]; [5. Тихонов В.И. Статистическая радиотехника. 2-е изд., перераб. и доп. - М.: Радио и связь, 1982. - 624 с.]. При этом нижняя граница случайной СКО σθr оценивания азимута θ ИРИ, с использованием трехэлементной КАР, выраженная в радианах, может быть представлена в виде [2, с.43]:
где λ - длина волны радиосигнала, пеленгуемого ИРИ;
β - угол наклона фронта волны (угол места) ИРИ;
q - отношение эффективного напряжения сигнала ИРИ к действующему значению напряжения внутреннего шума, приведенных к фазовым центрам антенн КАР.
Из формулы (2) следует, что уменьшение случайной СКО σθr достигается как путем увеличения радиуса КАР rcaw, так и на основе увеличения отношения сигнал/шум q путем увеличения (при заданном действующем значении напряжения внутреннего шума) эффективности приема ЭМВ каждой из антенн КАР.
Известно [1], что однозначность пеленгования в круговом азимутальном секторе достигается формированием и сравнением не менее трех идентичных несовпадающих однозначных фазовых ДН антенн. Кроме того, ограничением ФЧ способов пеленгования является возможность однозначного измерения разностей фаз между сигналами только в пределах ±180°, что приводит к ограничению пространственного разноса между антеннами КАР, не превышающего значения, близкого к половине длины волны радиосигнала, что, соответственно, ограничивает возможность увеличения радиуса rcaw трехэлементной эквидистантной КАР до значения, близкого к третьей части длины волны радиосигнала. В связи с этим, наиболее эффективным способом уменьшения σθr является увеличение эффективности формирования сигнала в антеннах КАР под действием ЭМП радиосигнала, в частности, для антенн вибраторного типа, увеличение их действующей длины, что достигается путем увеличения электродинамических размеров антенн. При этом увеличение эффективности приема ЭМП антеннами КАР неизбежно приводит к увеличению (за счет рассеяния ЭМВ) искажения структуры падающей на КАР ЭМВ, в результате чего равнофазовая поверхность суммарного ЭМП, формируемого сигналом пеленгуемого ИРИ, становится не плоской, что эквивалентно искажению форм как амплитудных, так и фазовых диаграмм направленности антенн КАР и приводит к возникновению методических ошибок пеленгования, обусловленных взаимным влиянием антенн, то есть к увеличению систематической СКО σθs.
В практически важном случае размещения геометрического центра КАР на мачтовом устройстве, представляющего собой проводящий осесимметричный элемент конструкции, рассеяние ЭМВ на указанном проводящем элементе приводит к дополнительному искажению равнофазовой поверхности суммарного ЭМП, формируемого сигналом пеленгуемого ИРИ, и, соответственно, к дополнительному увеличению систематической составляющей СКО σθs. И наконец, при одновременном приеме на частоте радиосигнала пеленгуемого ИРИ помехового радиосигнала другого назначения структура плоского фронта ЭМВ, создаваемого пеленгуемым ИРИ, может быть существенно искажена, что приводит к увеличению случайной составляющей СКО σθr и, соответственно, к ухудшению точности пеленгования.
Учитывая вышеизложенное, в общем случае, под воздействием ЭМП источника пеленгуемого радиосигнала, характеризуемого, во-первых, амплитудой Еs и фазой ϕso в точке О, являющейся центром плоской трехэлементной эквидистантной КАР радиуса rcaw, образованной первой, второй и третьей антеннами А1, А2 и А3 с угловой ориентацией в плоскости пеленгования α1, α2 и α3 соответственно и межэлементным расстоянием b; во-вторых, направлением распространения S, описываемым углом θ между проекцией направления S на плоскость пеленгования ОР и линией ON (опорным направлением) и углом β между направлением S и проекцией направления S на плоскость пеленгования ОР, а также - под воздействием ЭМП помехового радиосигнала другого назначения и с учетом внутренних шумов, приведенных к фазовым центрам антенн, на выходах идентичных ненаправленных антенн А1, А2 и А3 формируются сигналы  ,
,  и
и  соответственно, которые описываются выражениями:
соответственно, которые описываются выражениями:

где i=1, 2, 3 - номер антенны КАР;
t - время;
 - мнимая единица;
- мнимая единица;
ω - круговая частота радиосигнала;
Еh и ϕho - соответственно амплитуда и фаза в центре КАР электромагнитного поля помехового радиосигнала;
θh и βh - соответственно азимут и угол места направления распространения помехового радиосигнала;
 и
и  - комплексные ДН i-ой антенны в направлении распространения пеленгуемого и помехового радиосигналов соответственно;
- комплексные ДН i-ой антенны в направлении распространения пеленгуемого и помехового радиосигналов соответственно;
 - составляющая радиосигнала в фазовом центре i-ой антенны, обусловленная внутренним шумом i-го канала пеленгационного измерителя, являющаяся стационарным гауссовским случайным процессом с нулевым математическим ожиданием.
- составляющая радиосигнала в фазовом центре i-ой антенны, обусловленная внутренним шумом i-го канала пеленгационного измерителя, являющаяся стационарным гауссовским случайным процессом с нулевым математическим ожиданием.
С учетом взаимного влияния антенн и центрального элемента конструкции трехэлементной эквидистантной КАР комплексные ДН  ,
,  и
и  антенн могут быть представлены в виде:
антенн могут быть представлены в виде:



где Wi=ψcos(θ-αi) - задержка фазы электромагнитного поля в фазовом центре i-ой антенны Аi относительно фазы ЭМП в центре КАР (i=1, 2, 3);


h - коэффициент эффективности формирования сигнала в каждой идентичной антенне КАР под действием ЭМП радиосигнала с длиной волны λ (в частности - действующая длина антенны вибраторного типа);
 - комплексный коэффициент передачи входной цепи антенны;
- комплексный коэффициент передачи входной цепи антенны;
 - комплексный коэффициент ослабления электромагнитной волны, рассеянной одной из идентичных антенн решетки, зависящей от эффективности приема радиосигнала антенной h, параметров согласования антенны и межэлементного расстояния антенн в решетке (так как антенны решетки идентичны, а структура антенной решетки симметричная, то указанные коэффициенты являются одинаковыми для каждой из трех антенн решетки);
- комплексный коэффициент ослабления электромагнитной волны, рассеянной одной из идентичных антенн решетки, зависящей от эффективности приема радиосигнала антенной h, параметров согласования антенны и межэлементного расстояния антенн в решетке (так как антенны решетки идентичны, а структура антенной решетки симметричная, то указанные коэффициенты являются одинаковыми для каждой из трех антенн решетки);
 - комплексный коэффициент ослабления электромагнитной волны, рассеянной проводящим центральным элементом конструкции антенной решетки (в частности - мачтового устройства), зависящий от рассеивающих свойств центрального элемента и радиуса rcaw решетки.
- комплексный коэффициент ослабления электромагнитной волны, рассеянной проводящим центральным элементом конструкции антенной решетки (в частности - мачтового устройства), зависящий от рассеивающих свойств центрального элемента и радиуса rcaw решетки.
Необходимо отметить, что аналитическое представление рассеивающих свойств мачтового устройства в общем случае весьма затруднительно, так как существенно зависит от ряда конструктивных факторов мачтовых устройств. В отличие от параметр может быть представлен через импедансы нагрузки, собственного и взаимного сопротивления антенн решетки. Так, в случае выполнения условия:

комплексные ДН  могут быть представлены в виде [6. Виноградов А.Д., Левашов П.А. Новые предельные ограничения на формы диаграмм направленности малобазовых фазо- и поляризационно-чувствительных радиопеленгаторов. - Радиотехника, 2004, №5, с.77-82]:
могут быть представлены в виде [6. Виноградов А.Д., Левашов П.А. Новые предельные ограничения на формы диаграмм направленности малобазовых фазо- и поляризационно-чувствительных радиопеленгаторов. - Радиотехника, 2004, №5, с.77-82]:

где  - параметр, определяющий степень искажения ДН из-за взаимного влияния антенн КАР;
- параметр, определяющий степень искажения ДН из-за взаимного влияния антенн КАР;
ZR - импеданс нагрузки в клеммном сечении антенн решетки;
 и
и  - собственное и взаимное сопротивление антенн в составе решетки;
- собственное и взаимное сопротивление антенн в составе решетки;
i=1, 2, 3.
При этом параметры и и параметры ,  , и
, и  связаны соотношениями:
связаны соотношениями:


Из формул (4) и (8) следует, что формы как амплитудных, так и фазовых ДН антенн решетки из-за электродинамического взаимодействия между антеннами и мачтовым устройством являются неравномерными в азимутальной плоскости и зависят, в общем случае, от направления распространения ЭМВ. Подробное исследование неравномерности комплексных ДН антенн в трехэлементных КАР, приведенное в работе [7. Виноградов А.Д., Крачковский А.Б., Подшивалова Г.В. Исследование пеленгационных характеристик кольцевых антенных решеток с учетом взаимного влияния антенных элементов. - Радиотехника, №12, 2002, с.49-56], показывает, что для антенн решетки, соизмеримых с длиной волны, неравномерность амплитудных ДН составляет порядка (10÷15) дБ, а отклонение фазовой ДН от фазы ЭМВ в точке расположения антенны - до (30÷40)°.
Рассмотрим возможности пеленгования радиосигналов при вышеупомянутых условиях с использованием известных способов пеленгования и устройств, их реализующих.
Известен способ радиопеленгования, включающий прием радиосигнала с помощью трех идентичных ненаправленных антенн, образующих в плоскости пеленгования эквидистантную кольцевую антенную решетку, радиус rcaw которой выбран таким, чтобы расстояние между антеннами не превышало половину длины волны λ радиосигнала, причем положение первой, второй и третьей антенн ориентировано относительно опорного направления в плоскости пеленгования, проходящего через центр антенной решетки, под углами 0,  и
и  радиан соответственно, одновременное или поочередное измерение трех разностей фаз ϕi между сигналами
радиан соответственно, одновременное или поочередное измерение трех разностей фаз ϕi между сигналами  и
и  , принятыми n-ой и k-ой антеннами по правилу:
, принятыми n-ой и k-ой антеннами по правилу:

где i=1, 2, 3;
 - символ Кронекера с параметром у, принимающем значения у=i или у=n соответственно, и однозначное определение азимута θ и угла β наклона фронта волны источника радиосигнала по формулам:
- символ Кронекера с параметром у, принимающем значения у=i или у=n соответственно, и однозначное определение азимута θ и угла β наклона фронта волны источника радиосигнала по формулам:


[8. Патент Российской Федерации №2258241, кл. G01S 3/14, 3/74, опубл. 2005 г.].
Устройство, реализующее вышеупомянутый способ радиопеленгования, содержит три идентичные ненаправленные антенны, образующие в плоскости пеленгования эквидистантную кольцевую антенную решетку радиуса rcaw, при котором расстояния между антеннами не превышает половину минимальной длины волны радиосигнала, три идентичных радиоприемных блока, выполненных с общим гетеродином, три блока измерения разности фаз и вычислитель азимута θ и угла места β радиосигналов [8].
Недостатками известных способа радиопеленгования и устройства, его реализующего, являются низкие точность и чувствительность пеленгования, а также - отсутствие возможности оценки достоверности результатов пеленгования. Указанные недостатки обусловлены следующими причинами.
Согласно математическим выражениям (3) и (4) даже при отсутствии помехового сигнала другого назначения (Eh=0) взаимное влияние между идентичными ненаправленными антеннами решетки и влияние мачтового устройства (при его наличии) приводит к искажению структуры электромагнитного поля в точках размещения антенн решетки, проявляющемуся, во-первых, в неравномерности амплитудных ДН антенн в азимутальной плоскости, достигающей (10÷15) дБ, во-вторых, в искажении фазовых ДН каждой из антенн, что приводит к ошибкам оценки разностей фаз ϕi, определяемой согласно формулы (11). Оценим влияние каждого из указанных факторов на качество пеленгования ИРИ.
Согласно [1, с.63-66] случайная средняя квадратическая ошибка σϕ измерения разности фаз между двумя сигналами различного уровня зависит от отношений сигнал/шум, характеризующих первый и второй каналы пеленгационного измерителя. Поэтому для указанного случая неравноточных измерений случайная СКО σϕ может быть представлена в виде:
где q - отношение сигнал/шум для канала пеленгационного измерителя с наибольшей амплитудой сигнала;
а - коэффициент неравноточности измерений, равный отношению амплитуды наименьшего сигнала к амплитуде наибольшего сигнала (а≤1).
Так, например, при неравномерности амплитудных ДН пар антенн, равной (10÷15) дБ, значения коэффициента неравноточности составляют а=(0,316÷0,178), и, согласно (14), случайная СКО σϕ возрастает в (2,5÷4) раза соответственно. Это эквивалентно соответствующему ухудшению отношения сигнал/шум пеленгационного измерителя по сравнению со случаем равноточных измерений, что, согласно формуле (2), приводит к увеличению в (2,5÷4) раза случайной СКО σθr определения азимута ИРИ.
Ошибки оценки разностей фаз ϕi между парами сигналов, принятых антеннами с "искаженными" из-за взаимного влияния фазовыми ДН, согласно [7], достигают значений ±(50÷80)°, что приводит к методическим составляющим систематических ошибок пеленгования, максимальные значения которых достигают (6÷10)° по азимуту и десятки градусов по углу места.
Для уменьшения неравномерности амплитудных и искажений фазовых ДН антенн в составе КАР эффективность приема и, соответственно, рассеяния электромагнитных волн антеннами решетки ограничивают (путем уменьшения электродинамических размеров антенн) некоторой допустимой величиной, при которой систематическая составляющая ошибок σθs, обусловленная взаимным влиянием антенн, не превышает установленного значения, что, соответственно, приводит к ухудшению чувствительности пеленгования и увеличению случайной составляющей ошибок σθr.
При наличии на частоте сигнала пеленгуемого ИРИ помехового сигнала другого назначения, согласно (3), структура суммарного интерференционного электромагнитного поля приводит к формированию на выходах антенн сигналов  , которые при их обработке согласно рассматриваемых способа и устройства пеленгования по формулам (11-13) приводят к возникновению аномальных ошибок пеленгования. Из-за отсутствия признака наличия или отсутствия в момент измерений помехового радиосигнала достоверность результатов пеленгования снижается.
, которые при их обработке согласно рассматриваемых способа и устройства пеленгования по формулам (11-13) приводят к возникновению аномальных ошибок пеленгования. Из-за отсутствия признака наличия или отсутствия в момент измерений помехового радиосигнала достоверность результатов пеленгования снижается.
Известен способ радиопеленгования, включающий прием радиосигнала с помощью трех идентичных ненаправленных антенн, образующих в плоскости пеленгования эквидистантную кольцевую антенную решетку, радиус rcaw которой выбран таким, чтобы расстояние между антеннами не превышало половину длины волны λ радиосигнала, причем положение первой, второй и третьей антенн ориентировано относительно опорного направления в плоскости пеленгования, проходящего через центр антенной решетки, под углами 0, и радиан соответственно, одновременное измерение трех разностей фаз ϕi между сигналами и , принятыми n-ой и k-ой антеннами по правилу:

где i=1, 2, 3;
- символ Кронекера с параметром у, принимающем значения у=i или у=n соответственно;
* - знак комплексного сопряжения, одновременное формирование трех амплитудных значений разностных сигналов Ri по правилу:

где  - знаковая функция параметра X, принимающего значения
- знаковая функция параметра X, принимающего значения  или Х=ϕi соответственно, и однозначное определение азимута θ источника радиосигнала по формуле:
или Х=ϕi соответственно, и однозначное определение азимута θ источника радиосигнала по формуле:

[9. Патент Российской Федерации №2262119, кл. G01S 3/14, 3/74, опубл. 2005 г.]
Устройство, реализующее вышеупомянутый способ радиопеленгования, содержит три идентичные ненаправленные антенны, образующие в плоскости пеленгования эквидистантную кольцевую антенную решетку радиуса rcaw, при котором расстояние между антеннами не превышает половину минимальной длины волны радиосигнала, три идентичных радиоприемных блока, выполненных с общим гетеродином, три блока измерения разности фаз, три блока формирования разностных сигналов и вычислитель азимута θ радиосигналов [9].
Недостатками известных способа радиопеленгования и устройства, его реализующего, являются низкие точность и чувствительность пеленгования, а также - отсутствие возможности оценки достоверности результатов пеленгования. Указанные недостатки обусловлены следующими причинами.
Во-первых, используемый в рассматриваемом способе пеленгования компенсационный способ устранения методических составляющих систематических ошибок пеленгования, обусловленных взаимным влиянием антенн и мачтового устройства, основан на формировании разностных диаграмм направленности пар антенн, которые, как следует из (4), имеют априорно определенную функциональную зависимость от азимута θ и угла места β пеленгуемого радиосигнала, не связанную с параметрами, обусловленными электродинамическим взаимодействием как между антеннами, так и мачтовым устройством. Однако в указанных способе и устройстве радиопеленгования появляется другая составляющая методических погрешностей, обусловленная частотной зависимостью форм разностных диаграмм направленности пар антенн, называемая, как известно [1], ошибкой "разноса". Физическая сущность ошибок "разноса" заключается в несоответствии крутизны разностной ДН крутизне относительной фазовой ДН пары антенн, связанной точной аналитической зависимостью с положением фронта электромагнитной волны. Ошибки "разноса" пропорциональны отношению базы b (расстоянию между антеннами) к длине волны радиосигнала λ. Согласно [6] для рассматриваемых способа и устройства пеленгования при изменении отношения  в пределах от 0,3 до 0,5 максимальные ошибки "разноса" изменяются в пределах от 0,1° до 0,4° соответственно.
в пределах от 0,3 до 0,5 максимальные ошибки "разноса" изменяются в пределах от 0,1° до 0,4° соответственно.
Во-вторых, как следует из формулы (16), знак разностных диаграмм направленности пар антенн определяется знаком разности фаз сигналов, принятых указанной парой антенн. Как было ранее указано, однозначное измерение разностей фаз между сигналами возможно в пределах ±180°. Ошибка в определении знака разности фаз между сигналами вблизи 0°, обусловленная, например, воздействием внутреннего шума, соответственно, согласно (16), приводит к ошибке определения знака разностной диаграммы направленности, которая в рассматриваемом случае (для "синфазных" сигналов) близка к нулевому значению, что с учетом алгоритма (17) приводит к случайной ошибке пеленгования, потенциально достижимое значение которой определяется формулой (2). Совершенно другая ситуация возникает при ошибке определения разности фаз между сигналами, среднее значение которой близко к ±180°, что возникает при расстояниях между антеннами, близких к половине длины волны радиосигнала. В этом случае ошибка в определении знака разности фаз, согласно (16), приводит к ошибке определения знака разностной диаграммы направленности, которая, естественно, не равна нулевому значению и, как правило, близка к максимальному значению, что, согласно (17), приводит к возникновению аномальных ошибок пеленгования, которые могут составлять десятки градусов, что существенно снижает достоверность пеленгования. Как было отмечено ранее, в условиях взаимного влияния между антеннами и мачтовым устройством, во-первых, систематические составляющие ошибок измерений разностей фаз могут достигать значений ±(50÷80°); во-вторых, существенно (до 4 раз) возрастают случайные составляющие ошибок измерений разностей фаз, обусловленные неравноточностью измерений, обусловленной уменьшением уровня полезного сигнала в одной из антенн относительно другой. В связи с этим для уменьшения вероятности возникновения аномальных ошибок и повышения тем самым достоверности пеленгования радиус rcaw КАР ограничивают некоторой допустимой величиной, при которой расстояние b между антеннами обеспечивает получение максимальных разностей фаз порядка ±100°, что для трехэлементной эквидистантной КАР достигается при выполнении условия:
где λmin - минимальная длина волны рабочего диапазона длин волн пеленгуемых радиосигналов. Однако, согласно (2), указанный способ уменьшения аномальных ошибок приводит ухудшению чувствительности пеленгования и увеличению случайной составляющей ошибок пеленгования σθr.
В-третьих, при наличии на частоте сигнала пеленгуемого ИРИ помехового сигнала другого назначения, согласно (3), структура суммарного интерференционного электромагнитного поля приводит к формированию на выходах антенн сигналов , которые при их обработке согласно рассматриваемых способа и устройства радиопеленгования по формуле (17) приводят к возникновению аномальных ошибок пеленгования. Из-за отсутствия признака наличия в момент измерений помехового радиосигнала достоверность результатов пеленгования снижается.
Кроме того, дополнительным недостатком известных способа и устройства радиопеленгования является возможность определения угла прихода радиосигнала только в азимутальной плоскости.
Наиболее близким по технической сущности к предложенному способу является способ радиопеленгования, включающий прием радиосигнала с помощью трех идентичных ненаправленных осесимметричных антенн вибраторного типа, образующих в плоскости пеленгования эквидистантную кольцевую антенную решетку, радиус rcaw которой меньше третьей части длины волны λ радиосигнала, причем положение первой, второй и третьей антенн ориентировано относительно опорного направления в плоскости пеленгования, проходящего через центр антенной решетки, под углами 0, и радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, одновременное или поочередное измерение разностей фаз ϕi между сигналами и , принятыми n-ой и k-ой антеннами, по формуле

где i=1, 2, 3;
 - символ Кронекера;
- символ Кронекера;
 - символ Кронекера,
- символ Кронекера,
выбор из трех разностей фаз ϕ1, ϕ2 и ϕ3 m-ой, значение модуля которой является максимальным или одним из максимальных значений модулей разностей фаз, одновременное или поочередное формирование трех амплитудных значений разностных сигналов Ri по формуле:

где 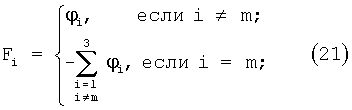
m - значение индекса максимальной разности фаз;
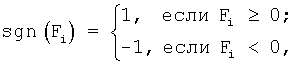 - знаковая функция параметра Fi, и однозначное определение азимута θ и угла β наклона фронта волны источника радиосигнала по формулам:
- знаковая функция параметра Fi, и однозначное определение азимута θ и угла β наклона фронта волны источника радиосигнала по формулам:
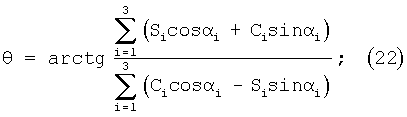
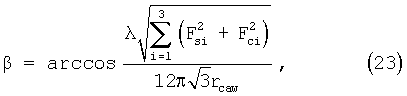
где 



[10. Патент Российской Федерации №2158001, кл. G01S 3/00, опубл. 2000 г.].
Необходимо отметить, что путем тригонометрических преобразований формула (22) с учетом выражений (6), (24) и (25) совпадает с формулой (17), то есть представляется в виде:

Известен также радиопеленгатор, содержащий три антенны, выполненные идентичными ненаправленными осесимметричными вибраторного типа, образующие в плоскости пеленгования эквидистантную кольцевую антенную решетку радиуса rcaw, меньшего третьей части длины волны λ радиосигнала, причем положение фазовых центров первой, второй и третьей антенн ориентировано относительно опорного направления в плоскости пеленгования, проходящего через центр антенной решетки, под углами 0, и радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, три идентичных радиоприемных блока, выполненных с общим гетеродином, входы которых соединены с выходами соответствующих антенн, три блока измерения разности фаз, три блока формирования разностных сигналов, компаратор, блок формирования однозначных амплитудных значений разностных сигналов, амплитудный вычислитель азимута, вычислитель угла места, датчик параметров вычислений, формирующий априорно известные значения расстояния b между антеннами, длины волны λ радиосигнала и углов αi ориентации антенн, и генератор управляющих сигналов, причем пара выходов первого радиоприемного блока соединена соответственно с вторыми парами входов вторых блоков измерения разности фаз и формирования разностных сигналов и первыми парами входов третьих блоков измерения разности фаз и формирования разностных сигналов, пара выходов второго радиоприемного блока соединена соответственно с первыми парами входов первых блоков измерения разности фаз и формирования разностных сигналов и вторыми парами входов третьих блоков измерения разности фаз и формирования разностных сигналов, пара выходов третьего радиоприемного блока соединена соответственно с вторыми парами входов первых блоков измерения разности фаз и формирования разностных сигналов и первыми парами входов вторых блоков измерения разности фаз и формирования разностных сигналов, выходы первого, второго и третьего блоков измерения разности фаз, первого, второго и третьего блоков формирования разностных сигналов и первый, второй и третий выходы компаратора соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым входами блока формирования однозначных амплитудных значений разностных сигналов, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами амплитудного вычислителя азимута, выход генератора управляющих сигналов соединен с управляющими входами первого, второго и третьего радиоприемных блоков и управляющим входом датчика параметров вычислений, первый и второй выходы которого соединены соответственно с первым и вторым входами вычислителя угла места, кроме того, выходы первого, второго и третьего блоков измерения разности фаз соединены с соответствующими входами компаратора и соответствующими входами вычислителя угла места, а первый, второй и третий выходы компаратора соединены, кроме того, с соответствующими входами вычислителя угла места, и, наконец, третий выход датчика параметров вычислений соединен с соответствующим входом амплитудного вычислителя азимута, причем выходы амплитудного вычислителя азимута и вычислителя угла места являются выходами значений соответственно азимута θ и угла β наклона фронта волны источника радиосигнала [10].
Недостатками ближайших аналогов способа радиопеленгования и радиопеленгатора для его осуществления являются низкие точность и чувствительность пеленгования, а также - отсутствие возможности оценки достоверности результатов пеленгования. Указанные недостатки обусловлены следующими причинами.
Во-первых, формирование в ближайших аналогах разностных диаграмм направленности в соответствии с формулой (20) позволяет в условиях априорной неопределенности параметров искажений диаграмм направленности антенн устранить методическую составляющую ошибок определения азимута θ, обусловленную взаимным влиянием между антеннами и мачтовым устройством, однако, как и в ранее рассмотренном аналоге [9], при определении азимута θ по формуле (28) возникают ошибки "разноса", пропорциональные отношению базы (расстояния между антеннами) b к длине волны λ. Согласно [6] для рассматриваемых способа и устройства радиопеленгования при изменении отношения в пределах от 0,3 до 0,575 максимальные ошибки "разноса" изменяются в пределах от 0,1° до 0,44° соответственно.
Во-вторых, как следует из формул (20) и (21), знаки разностных диаграмм направленности всех трех пар антенн определяются знаками двух наименьших по модулю разностей фаз между выбранными парами сигналов, которые по сравнению с третьей (максимальной по модулю) разностью фаз более устойчивы к случаям изменения знака (при приближении к граничному значению однозначного измерения разностей фаз в пределах ±180°) из-за систематических ошибок определения разностей фаз, обусловленных искажением фазовых диаграмм направленности антенн, и случайных ошибок определения разностей фаз, связанных с искажением амплитудных диаграмм направленности антенн, являющихся следствием электродинамического взаимодействия между антеннами и влияния мачтового устройства. Указанные факторы приводят к тому, что при отношении базы b к длине волны, превышающем значения порядка (0,35÷0,4), для рассматриваемых способа и устройства радиопеленгования становятся характерными аномальные ошибки пеленгования, которые могут составлять десятки градусов, что существенно снижает достоверность пеленгования. В связи с этим для уменьшения вероятности возникновения аномальных ошибок и повышения, тем самым, достоверности пеленгования радиус rcaw антенной решетки ограничивают некоторой допустимой величиной, при которой расстояние b между антеннами обеспечивает получение максимальных значений двух из трех измеряемых разностей фаз порядка ±100°, что для трехэлементной эквидистантной КАР достигается при выполнении условия:

где λmin - минимальная длина волны рабочего диапазона длин волн. Однако, согласно (2), указанный способ уменьшения аномальных ошибок приводит к ухудшению чувствительности пеленгования и увеличению случайной составляющей ошибок пеленгования σθr.
В-третьих, как следует из формул (23), (26), (27), (19) и (21), оценка угла β наклона фронта волны источника радиосигнала проводится по измеренным разностям фаз ϕi между парами сигналов, принятых антеннами с "искаженными" из-за взаимного влияния фазовыми диаграммами направленности. Согласно [6], систематические ошибки измерений разностей фаз ϕi в трехэлементной эквидистантной КАР достигают значений ±(50÷80)°, что приводит к недопустимо большой, составляющей десятки градусов, методической составляющей ошибок пеленгования по углу места β. Кроме того, из-за неравноточности измерений разностей фаз между сигналами, принятыми электродинамическими взаимодействующими антеннами трехэлементной КАР, увеличивается случайная составляющая ошибок пеленгования по углу места β. Это приводит фактически к получению во всех случаях только качественной оценки наклона фронта электромагнитной волны.
В-четвертых, при наличии на частоте радиосигнала пеленгуемого ИРИ помехового сигнала другого назначения, согласно (3), структура суммарного интерференционного электромагнитного поля приводит к формированию на выходах антенн сигналов , которые при их обработке согласно рассматриваемых способа и устройства радиопеленгования по формулам (22) и (23) приводят к возникновению аномальных ошибок пеленгования. Из-за отсутствия признака наличия в момент измерений помехового радиосигнала достоверность результатов пеленгования снижается.
В целом указанные недостатки приводят к снижению качества пеленгации и ограничению области применения радиопеленгатора.
Решаемая изобретением задача - повышение качества пеленгации и расширение арсенала средств при пеленгации источников радиоизлучений.
Технический результат, который может быть получен при осуществлении способа, - повышение точности и чувствительности однозначного пеленгования за счет уменьшения методических составляющих систематических ошибок пеленгования, случайных составляющих ошибок пеленгования и исключения аномальных ошибок пеленгования, обусловленных искажением пространственно-временной структуры электромагнитных волн пеленгуемых радиосигналов из-за электродинамического взаимодействия между антеннами пеленгационного измерителя и влияния мачтового устройства.
Технический результат, который может быть получен при выполнении устройства, - повышение точности, чувствительности и достоверности результатов пеленгования.
Поставленная задача решается тем, что в способе радиопеленгования, включающем прием радиосигнала с помощью трех антенн, выполненных идентичными ненаправленными осесимметричными вибраторного типа, образующих в плоскости пеленгования эквидистантную кольцевую антенную решетку, причем положение фазовых центров первой, второй и третьей антенн ориентировано относительно опорного направления в плоскости пеленгования, проходящего через центр антенной решетки, под углами 0, , радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, измерение разностей фаз ϕi между сигналами и , принятыми n-ой и k-ой антеннами, в соответствии с формулой

где 


- символ Кронекера;
- символ Кронекера,
формирование разностных сигналов  , и их амплитудных значений ri по формуле
, и их амплитудных значений ri по формуле


и измерение азимута θR источника радиосигнала с использованием трех однозначных амплитудных значений разностных сигналов Ri по формуле

согласно изобретению дополнительно измеряют амплитудные значения ui сигналов, принятых i-ыми антеннами решетки, в соответствии с выражением

и формируют коэффициенты Рi и Кi неравномерности диаграмм направленности антенн в составе решетки по формулам


где  - знаковая функция,
- знаковая функция,
выбирают из трех значений индексов i порядковых номеров антенн i=1, i=2, i=3 одно значение индекса ξ, одно значение индекса γ и одно значение индекса ν, не равные между собой, из условия

причем значению индекса ξ присваивают значение индекса i, при котором произведение riPi является минимальным или одним из минимальных при равенстве вышеупомянутых произведений riPi, а значению индекса ν присваивают значение индекса i, при котором произведение riPi является максимальным или одним из максимальных при равенстве вышеупомянутых произведений riPi, а значению индекса γ присваивают оставшееся значение индекса i,
определяют коэффициент р однозначности пеленгования в соответствии с выражением

где Kmid - априорно известное среднее значение коэффициентов Кi неравномерности диаграмм направленности антенн, зависящее от электродинамических размеров антенн, конструкции решетки и мачтового устройства,
формируют три однозначных амплитудных значения разностных сигналов Ri в случае, если расстояние b между антеннами не превышает трех десятых частей длины волны λ радиосигнала, в соответствии с выражением

где 
а в случае, если расстояние b между антеннами превышает три десятых части длины волны λ радиосигнала, в соответствии с выражением
где 
 - символ Кронекера,
- символ Кронекера,
 - знаковая функция параметра Y, принимающего значения Y=ϕi или Y=Rγ соответственно,
- знаковая функция параметра Y, принимающего значения Y=ϕi или Y=Rγ соответственно,
измеряют разности фаз ϕRi между разностными сигналами  по формуле
по формуле

где - знаковая функция параметра Y, принимающего значения Y=Rk или Y=Rn соответственно,
определяют значение параметра μ, характеризующего наличие квадратурной составляющей помехового сигнала, по формуле

проводят проверку выполнения условия превышения минимальной амплитуды rξ разностных сигналов относительно априорно известной минимальной амплитуды разностного сигнала rmin по формуле

где 
qmin - алриорно известное минимально необходимое отношение сигнал/шум, обеспечивающее пеленгование источников радиоизлучения с заданными точностью и вероятностью;
Ueff - действующее значение напряжения внутреннего шума каналов формирования разностных сигналов,
определяют азимут θϕ источника радиосигнала с использованием разностей фаз ϕRi между разностными сигналами по формулам
где b - расстояние между антеннами, не превышающее двух третьих длины волны λ радиосигнала,
определяют погрешность Δθ оценки азимута θ по формуле

где 
определяют азимут θ и оценивают угол β наклона фронта волны источника радиосигнала по формулам


где 
βsp - признак наличия в точке приема радиосигнала, распространяющегося в виде пространственной электромагнитной волны, наклон фронта которой не может быть определен и находится в пределах 
Δθmax - априорно известное значение максимально допустимой ошибки определения азимута θ,
а по значениям параметра μ и погрешности Δθ судят о достоверности результатов определения азимута θ и угла β наклона фронта волны источника радиосигнала, причем указанная достоверность обратно пропорциональна величинам параметра μ и погрешности Δθ определения азимута источника радиосигнала.
Поставленная задача решается также тем, что в радиопеленгаторе, содержащем три антенны, выполненные идентичными ненаправленными осесимметричными вибраторного типа, образующие в плоскости пеленгования эквидистантную кольцевую антенную решетку, причем положение фазовых центров первой, второй и третьей антенн ориентировано относительно опорного направления в плоскости пеленгования, проходящего через центр антенной решетки, под углами 0, и радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, три идентичных радиоприемных блока, выполненных с общим гетеродином, входы которых соединены с выходами соответствующих антенн, три блока измерения разности фаз, три блока формирования разностных сигналов, компаратор, блок формирования однозначных амплитудных значений разностных сигналов, амплитудный вычислитель азимута, вычислитель угла места, датчик параметров вычислений, формирующий априорно известные значения расстояния b между антеннами и длины волны λ радиосигнала, и генератор управляющих сигналов, причем пара выходов первого радиоприемного блока соединена соответственно с вторыми парами входов вторых блоков измерения разности фаз и формирования разностных сигналов и первыми парами входов третьих блоков измерения разности фаз и формирования разностных сигналов, пара выходов второго радиоприемного блока соединена соответственно с первыми парами входов первых блоков измерения разности фаз и формирования разностных сигналов и вторыми парами входов третьих блоков измерения разности фаз и формирования разностных сигналов, пара выходов третьего радиоприемного блока соединена соответственно с вторыми парами входов первых блоков измерения разности фаз и формирования разностных сигналов и первыми парами входов вторых блоков измерения разности фаз и формирования разностных сигналов, выходы первого, второго и третьего блоков измерения разности фаз, первые выходы первого, второго и третьего блоков формирования разностных сигналов и первый, второй, и третий выходы компаратора соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым входами блока формирования однозначных амплитудных значений разностных сигналов, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами амплитудного вычислителя азимута, выход генератора управляющих сигналов соединен с управляющими входами первого, второго и третьего радиоприемных блоков и управляющим входом датчика параметров вычислений, первый и второй выходы которого соединены соответственно с первым и вторым входами вычислителя угла места, выход которого является выходом значения угла β наклона фронта волны источника радиосигнала, согласно изобретению расстояние между антеннами выбрано не превышающем двух третьих длины волны радиосигнала, компаратор выполнен с возможностью определения упорядоченной совокупности трех номеров антенн, через фазовые центры которых последовательно во времени проходит фронт электромагнитной волны источника радиосигнала, датчик параметров вычислений выполнен с возможностью формирования априорно известных среднего значения Kmid коэффициентов неравномерности диаграмм направленности антенн в составе решетки, минимальной амплитуды разностного сигнала rmin, при которой обеспечивается минимально необходимое отношение сигнал/шум qmin относительно действующего значения напряжения Ueff внутреннего шума каналов формирования разностных сигналов радиопеленгатора и максимально допустимой ошибки Δθmax определения азимута, блок формирования однозначных амплитудных значений разностных сигналов выполнен с возможностью формирования амплитудных значений разностных сигналов с учетом знаков разностей фаз между сигналами, принятыми антеннами, в случае, если расстояние b между антеннами не превышает трех десятых частей длины волны λ радиосигнала, или с учетом результатов сравнения амплитуд сигналов, принятых антеннами трехэлементной решетки, в случае, если расстояние b между антеннами превышает три десятые части длины волны λ радиосигнала, вычислитель угла места выполнен с возможностью адаптивной оценки угла места с использованием разностей фаз между разностными сигналами, принятыми тремя различными парами антенн, в зависимости от отношения минимальной амплитуды разностных сигналов к действующему значению напряжения внутреннего шума каналов формирования разностных сигналов радиопеленгатора и погрешности оценки азимута радиосигнала, и дополнительно введены блок формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн, первая, вторая и третья пары входов которого соединены с парами выходов первого, второго и третьего радиоприемных блоков соответственно, вычислитель коэффициента однозначности пеленгования, вычислитель шумового порогового коэффициента, блок определения разности фаз между разностными сигналами, вычислитель квадратурной составляющей помехового сигнала, фазовый вычислитель азимута, вычислитель погрешности оценки азимута, вычислитель азимутального порогового коэффициента и блок определения азимута, причем вторые и третьи выходы первого, второго и третьего блоков формирования разностных сигналов соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами блока определения разности фаз между разностными сигналами, а первые выходы первого, второго и третьего блоков формирования разностных сигналов соединены соответственно с объединенными первыми, объединенными вторыми и объединенными третьими входами компаратора и вычислителя шумового порогового коэффициента, первый выход компаратора соединен с объединенными четвертым входом вычислителя шумового порогового коэффициента и первыми входами вычислителя коэффициента однозначности пеленгования и фазового вычислителя азимута, первый, второй, третий, четвертый, пятый и шестой выходы блока формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн соединены соответственно с четвертым, пятым и шестым входами компаратора и вторым, третьим и четвертым входами вычислителя коэффициента однозначности пеленгования, пятый вход и выход которого соединены соответственно с третьим выходом датчика параметров вычислений и объединенными десятым входом блока формирования однозначных амплитудных значений разностных сигналов и вторым входом фазового вычислителя азимута, первый, второй и третий выходы блока формирования однозначных амплитудных значений разностных сигналов соединены соответственно с объединенными первым входом вычислителя квадратурной составляющей помехового сигнала и седьмым входом блока определения разности фаз между разностными сигналами, с объединенными вторым входом вычислителя квадратурной составляющей помехового сигнала и восьмым входом блока определения разности фаз между разностными сигналами и с объединенными третьим входом вычислителя квадратурной составляющей помехового сигнала и девятым входом блока определения разности фаз между разностными сигналами, первый, второй и третий выходы которого соединены соответственно с объединенными третьими, объединенными четвертыми и объединенными пятыми входами вычислителя угла места и фазового вычислителя азимута, объединенные шестые входы фазового вычислителя азимута и вычислителя угла места и первый вход блока определения азимута соединены с выходом вычислителя шумового порогового коэффициента, пятый вход которого соединен с четвертым выходом датчика параметров вычислений, выход фазового вычислителя азимута соединен с объединенными первым входом вычислителя погрешности оценки азимута и вторым входом блока определения азимута, третий вход которого, объединенный с вторым входом вычислителя погрешности оценки азимута, соединен с выходом амплитудного вычислителя азимута, выход вычислителя погрешности оценки азимута и пятый выход датчика параметров вычислений соединены соответственно с первым и вторым входами вычислителя азимутального порогового коэффициента, выход которого соединен с объединенными седьмым входом вычислителя угла места и четвертым входом блока определения азимута, первый и второй выходы датчика параметров вычислений соединены соответственно с объединенными одиннадцатым входом блока формирования однозначных амплитудных значений разностных сигналов и седьмым входом фазового вычислителя азимута и с объединенными двенадцатым входом блока формирования однозначных амплитудных значений разностных сигналов и восьмым входом фазового вычислителя азимута, причем выход блока определения азимута является выходом значения азимута θ источника радиосигнала, а выходы вычислителя квадратурной составляющей помехового сигнала и вычислителя погрешности оценки азимута являются выходами параметров достоверности результатов пеленгования μ и Δθ соответственно.
Решение поставленной задачи с достижением технического результата обусловлено следующим.
В предложенном способе радиопеленгования, в отличие от известного:
во-первых, пеленгационная характеристика по азимуту определяется с использованием как однозначных амплитудных разностных диаграмм направленности пар антенн, так и с использованием однозначных фазовых разностных диаграмм направленности пар антенн, причем каждые из указанных диаграмм направленности обеспечивают полную компенсацию методических составляющих ошибок пеленгования, обусловленных взаимным влиянием антенн и мачтового устройства, а совместное использование указанных амплитудных и фазовых диаграмм направленности позволяет, при сохранении однозначности пеленгования в круговом азимутальном секторе, обеспечиваемой использованием амплитудных разностных диаграмм направленности, уменьшить в 2 раза ошибки "разноса", свойственные пеленгационным характеристикам, использующим только амплитудные разностные диаграммы направленности;
во-вторых, для обеспечения однозначности формирования как амплитудных, так и фазовых разностных диаграмм направленности пар антенн используется выявленная закономерность взаимосвязей между амплитудными и фазовыми искажениями диаграмм направленности антенн трехэлементной эквидистантной кольцевой антенной решетки, возникающими при электродинамическом взаимодействии между антеннами и влиянии мачтового устройства, которая позволяет не только увеличить до двух третьих волны радиосигнала расстояние между антеннами трехэлементной кольцевой антенной решетки с сохранением однозначности пеленгования и соответствующим уменьшением случайных ошибок пеленгования, но и существенно уменьшить аномальные ошибки пеленгования, связанные с искажением фазовых диаграмм антенн из-за взаимного влияния антенн и мачтового устройства и случайными ошибками измерения разностей фаз между сигналами, принятыми антеннами с существенно различающимися амплитудными диаграммами направленности, также обусловленными взаимным влиянием между антеннами и мачтовым устройством;
в-третьих, пеленгационная характеристика по углу места β при абсолютном большинстве направлений распространения электромагнитных волн в круговом азимутальном секторе формируется с использованием однозначных фазовых разностных диаграмм направленности пар антенн, не подверженных искажению из-за взаимного влияния антенн и мачтового устройства, что обеспечивает устранение соответствующей методической составляющей систематических ошибок определения угла β наклона фронта волны источника радиосигнала, а для азимутальных направлений распространения электромагнитных волн, близких к азимутальным направлениям, проходящим через центр антенной решетки и любой из трех антенн, путем сравнения амплитудной θR и фазовой θϕ азимутальных пеленгационных характеристик производится однозначная оценка принадлежности радиосигнала к сигналу, распространяющимся в виде поверхностных электромагнитных волн (β=0), или сигналу, распространяющемуся в виде пространственных электромагнитных волн  , что в общем случае при пеленговании радиосигналов в круговом азимутальном секторе обеспечивает не только повышение точности, но и повышение достоверности оценок угла β наклона фронта волны источника радиосигнала;
, что в общем случае при пеленговании радиосигналов в круговом азимутальном секторе обеспечивает не только повышение точности, но и повышение достоверности оценок угла β наклона фронта волны источника радиосигнала;
в-четвертых, предложено два правила оценивания достоверности результатов пеленгования, первое из которых основано на сравнении однозначных амплитудных разностных диаграмм направленности пар антенн и позволяет в условиях взаимного влияния антенн и мачтового устройства определять уровень квадратурной составляющей помехового радиосигнала в круговом азимутальном секторе пеленгуемого радиосигнала в случае несовпадения проекций на плоскость пеленгования направлений распространения электромагнитных волн пеленгуемого и помехового радиосигналов, а второе основано на сравнении амплитудной азимутальной пеленгационной характеристики θR, полученной с использованием однозначных амплитудных диаграмм направленности пар антенн, и фазовой азимутальной пеленгационной характеристики θϕ, полученной с использованием однозначных фазовых разностных диаграмм направленности пар антенн, различия между которыми, не зависящие от взаимного влияния антенн и мачтового устройства, при приеме одного пеленгуемого радиосигнала не превышают ошибок "разноса", максимальное значение которых (для наибольшего расстояния между антеннами, равного двум третьим длины волны радиосигнала) не превышает 1°, за исключением случаев приема одного пеленгуемого радиосигнала, распространяющегося в виде пространственной электромагнитной волны с азимутальными направлениями, близкими к азимутальным направлениям, проходящим через центр антенной решетки и любой из трех антенн, а при одновременном приеме на одной длине волны пеленгуемого и помехового радиосигналов - зависят от соотношения комплексных амплитуд пеленгуемого и помехового сигналов, приводящего к формированию суммарной пространственно-временной структуры интерференционного поля в фазовых центрах трехэлементной антенной решетки, которая различным образом искажает амплитудную θR и фазовую θϕ азимутальные пеленгационные характеристики; совместное использование предложенных двух признаков наличия в момент измерений помехового радиосигнала позволяет проводить оценку достоверности результатов пеленгования в круговом азимутальном секторе при произвольных фазовых соотношениях пеленгуемого и помехового радиосигналов.
Для реализации предложенного способа радиопеленгования в состав радиопеленгатора, в отличие от известного, введены блок формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн, вычислитель коэффициента однозначности пеленгования, блок формирования однозначных амплитудных значений разностных сигналов, блок определения разности фаз между разностными сигналами, вычислитель квадратурной составляющей помехового сигнала, вычислитель шумового порогового коэффициента, фазовый вычислитель азимута, вычислитель погрешности оценки азимута, вычислитель азимутального порогового коэффициента и блок определения азимута. Кроме того, увеличено максимально допустимое для однозначного пеленгования расстояние между антеннами, что, как известно, способствует повышению точности и чувствительности пеленгования, компаратор выполнен с возможностью определения упорядоченной совокупности номеров антенн, через которые последовательно во времени проходит фронт электромагнитной волны источника радиосигнала, не с использованием разностей фаз между сигналами, принятыми парами антенн, как это осуществляется в ближайшем аналоге, а с использованием амплитудных значений как разностных сигналов, принятых парами антенн, так и сигналов, принятых каждой из антенн трехэлементной КАР, что обеспечивает возможность устранения аномальных ошибок пеленгования, а вычислитель угла места выполнен с возможностью адаптивной оценки угла места в зависимости от отношения минимальной амплитуды разностных сигналов к действующему напряжению шума радиоприемных блоков и погрешности оценки азимута радиосигнала, что обеспечивает устранение методической составляющей систематической ошибки определения наклона фронта электромагнитных волн, обусловленной взаимными влияниями антенн и мачтового устройства, и повышает достоверность пеленгования. И, наконец, датчик параметров вычислений выполнен с возможностью формирования априорно известных среднего значения коэффициентов неравномерности диаграмм направленности, минимально необходимой амплитуды разностного сигнала и максимально допустимой ошибки определения азимута, что обеспечивает возможность функционирования как введенных в состав, так и доработанных блоков радиопеленгатора.
Указанные преимущества, а также особенности настоящего изобретения поясняются лучшим вариантом его осуществления со ссылками на прилагаемые чертежи.
Фиг.1 изображает схему расположения антенн в плоскости пеленгования, поясняющую сущность предложенных способа радиопеленгования и радиопеленгатора для его осуществления;
фиг.2 - типовые графики функциональной зависимости от азимута θ величин искажений одной (первой) разности фаз Δϕ1(θ) между сигналами, принятыми парой антенн (второй и третьей антеннами) трехэлементной КАР, обусловленных взаимным влиянием антенн;
фиг.3 - типовые графики амплитудных диаграмм направленности одной (первой) антенны D1(θ) в азимутальной плоскости (β=0) трехэлементной КАР, обусловленных взаимным влиянием антенн;
фиг.4 - экспериментальные графики ненормированных амплитудных азимутальных диаграмм направленности D1 одной (первой) антенны трехэлементной КАР при отношении общей длины симметричной антенны вибраторного типа к расстоянию b между антеннами в решетке, составляющем 1,5, для различных отношений , изменяющихся в пределах от 0,3 до 0,66;
фиг.5 - графики зависимостей модулей максимальных методических ошибок от отношения трехэлементной КАР при β=0, свойственных правилу оценивания азимута с использованием однозначных амплитудных значений разностных сигналов согласно предложенному способу радиопеленгования (ошибок "разноса" |ΔθRmax|) и правилу оценивания азимута с использованием разностей фаз между парами сигналов согласно известным фазочувствительным способам пеленгования (ошибок, обусловленных взаимным влиянием между антенными элементами КАР);
фиг.6 - функциональную схему заявленного радиопеленгатора;
фиг.7 - функциональную схему варианта реализации блока формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн;
фиг.8 - функциональную схему варианта реализации компаратора;
фиг.9 - функциональную схему варианта реализации вычислителя коэффициента однозначности пеленгования;
фиг.10 - функциональную схему варианта реализации вычислителя шумового порогового коэффициента;
фиг.11 - функциональную схему варианта реализации блока определения разности фаз между разностными сигналами;
фиг.12 - функциональную схему варианта реализации вычислителя разности фаз, входящего в состав блока определения разности фаз между разностными сигналами и в состав варианта реализации блока измерения разности фаз;
фиг.13 - функциональную схему варианта реализации блока формирования однозначных амплитудных значений разностных сигналов;
фиг.14 - функциональную схему варианта реализации низкочастотного вычислителя однозначных амплитуд разностных сигналов, входящего в состав блока формирования однозначных амплитудных значений разностных сигналов;
фиг.15 - функциональную схему варианта реализации высокочастотного вычислителя однозначных амплитуд разностных сигналов, входящего в состав блока формирования однозначных амплитудных значений разностных сигналов;
фиг.16 - функциональную схему варианта реализации вычислителя параметра цикличности номеров антенн, входящего в состав блока формирования однозначных амплитудных значений разностных сигналов;
фиг.17 - функциональную схему варианта реализации амплитудного вычислителя азимута;
фиг.18 - функциональную схему варианта реализации вычислителя квадратурной составляющей помехового сигнала;
фиг.19 - функциональную схему варианта реализации фазового вычислителя азимута;
фиг.20 - функциональную схему варианта реализации вычислителя погрешности оценки азимута;
фиг.21 - функциональную схему варианта реализации вычислителя угла места;
фиг.22 - функциональную схему варианта реализации блока определения азимута;
фиг.23 - функциональную схему варианта реализации блока формирования разностных сигналов;
фиг.24 - внешний вид варианта реализации эквидистантной кольцевой антенной решетки, содержащей три идентичные ненаправленные осесимметричные антенны вибраторного типа в симметричном исполнении, размещенной на мачтовом устройстве;
фиг.25 - внешний вид варианта реализации приемоиндикатора радиопеленгатора, включающего все блоки радиопеленгатора (за исключением антенной решетки) и монитор автоматизированного рабочего места оператора;
фиг.26 - экспериментальные результаты пеленгования широкополосного источника радиоизлучения, имеющего истинное значение азимута 181°, одним из образцов радиопеленгатора, реализующего заявленный способ радиопеленгования, представленные на экране монитора автоматизированного рабочего места оператора;
фиг.27 - то же, что на фиг.26, для истинного значения азимута 196,8°;
фиг.28 - то же, что на фиг.26, для истинного значения азимута 211,7°.
Схема пространственного расположения фазовых центров антенн А1, А2 и А3 плоской трехэлементной КАР радиуса rcaw относительно центра О антенной решетки, опорного направления ON и направления на ИРИ S представлена на фиг.1, где, кроме того, обозначено: α1, α2 и α3 - углы между опорным направлением ON и линиям, проходящими через центр О КАР и фазовые центры первой А1, второй А2 и третьей А3 антенн соответственно, причем α1=0°;  - расстояние между фазовыми центрами пар антенн эквидистантной КАР (база пеленгационных пар антенн); θ - азимут ИРИ, равный углу между проекцией направления S распространения ЭМВ на плоскость пеленгования ОР и линией ON (опорным направлением); β - угол наклона фронта волны (угол места) ИРИ, равный углу между направлением S распространения ЭМВ и проекцией направления S на плоскость пеленгования ОР.
- расстояние между фазовыми центрами пар антенн эквидистантной КАР (база пеленгационных пар антенн); θ - азимут ИРИ, равный углу между проекцией направления S распространения ЭМВ на плоскость пеленгования ОР и линией ON (опорным направлением); β - угол наклона фронта волны (угол места) ИРИ, равный углу между направлением S распространения ЭМВ и проекцией направления S на плоскость пеленгования ОР.
Электромагнитное поле источника пеленгуемого радиосигнала, характеризуемого: во-первых, амплитудой Еs и фазой ϕso в точке О (фиг.1), являющейся центром плоской трехэлементной эквидистантной кольцевой антенной решетки радиуса rcaw, образованной первой, второй и третьей антеннами А1, А2 и А3 с угловой ориентацией в плоскости пеленгования α1, α2 и α3 соответственно и межэлементным расстоянием b; во-вторых, направлением распространения S, описываемым углом θ между проекцией направления S на плоскость пеленгования ОР и линией ON (опорным направлением) и углом β между направлением S и проекцией направления S на плоскость пеленгования ОР, формирует на входах идентичных ненаправленных осесимметричных антенн А1, А2 и А3 вибраторного типа сигналы  ,
,  и
и  соответственно, которые при отсутствии электромагнитного поля помехового сигнала (Еh=0) и пренебрежимо малых составляющих радиосигналов, обусловленных внутренним шумом каналов пеленгационного измерителя, с учетом обозначений параметров, приведенных в формуле (3), описываются выражениями:
соответственно, которые при отсутствии электромагнитного поля помехового сигнала (Еh=0) и пренебрежимо малых составляющих радиосигналов, обусловленных внутренним шумом каналов пеленгационного измерителя, с учетом обозначений параметров, приведенных в формуле (3), описываются выражениями:

причем комплексные диаграммы направленности  ,
,  и
и  антенн трехэлементной антенной решетки с учетом электродинамического взаимодействия в общем виде описываются выражениями (4) или (8).
антенн трехэлементной антенной решетки с учетом электродинамического взаимодействия в общем виде описываются выражениями (4) или (8).
Информация о направлении распространения электромагнитной волны ИРИ по азимуту θ и углу места β при произвольных электродинамических размерах осесимметричных антенн трехэлементной эквидистантной КАР содержится как в разностях фаз ϕi между парами сигналов  и
и  , принятых n-ой и k-ой антеннами КАР, так и в разностных сигналах
, принятых n-ой и k-ой антеннами КАР, так и в разностных сигналах  и их амплитудных значениях ri (i=1, 2, 3), определяемых по правилам (30), (34) и (35) соответственно, которые с учетом (60), (4) - (10) описываются выражениями:
и их амплитудных значениях ri (i=1, 2, 3), определяемых по правилам (30), (34) и (35) соответственно, которые с учетом (60), (4) - (10) описываются выражениями:


где θi=θ-αi - угол между проекцией направления распространения ЭМВ и направлением на антенну Аi из центра О антенной решетки;
Δϕi=χ1-χ2 - искажение разности фаз ϕi, обусловленное электродинамическим взаимодействием между антеннами КАР;


 и
и  - действительная и мнимая части комплексного параметра ,
- действительная и мнимая части комплексного параметра ,
 - коэффициент передачи входной цепи при формировании разностного сигнала из пары сигналов, принятых парой антенн.
- коэффициент передачи входной цепи при формировании разностного сигнала из пары сигналов, принятых парой антенн.
Типовые графики функциональной зависимости от азимута в величин искажений одной (первой) разности фаз Δϕi(θ) между сигналами, принятыми парой антенн (второй и третьей антеннами) трехэлементной КАР, характеризуемой отношением общей длины 2la антенн вдоль их осей симметрии к расстоянию b между антеннами (базе), равным 1,5, полученные методом математического моделирования с использованием формул (63) и (64), представлены на фиг.2, где кривые 1, 2 и 3 получены для β=0 и при отношениях  ,
,  и
и  соответственно.
соответственно.
Необходимо отметить, что выражение (61), описывающее ϕi, при наличии мачтового устройства  является приближенным, а выражение (62), описывающее
является приближенным, а выражение (62), описывающее  является точным независимо от отсутствия
является точным независимо от отсутствия  или наличия
или наличия  электродинамически взаимосвязанного с антеннами мачтового устройства, расположенного в центре КАР, что обусловлено полной компенсацией искажений комплексных ДН антенн
электродинамически взаимосвязанного с антеннами мачтового устройства, расположенного в центре КАР, что обусловлено полной компенсацией искажений комплексных ДН антенн  , и описываемых выражениями (4), при формировании по правилу (34) разностных сигналов, принятых парами антенн. Вместе с тем разности фаз ϕi между сигналами, принятыми парами антенн, содержат "искаженную" (из-за взаимного влияния антенн и мачтового устройства) и однозначную (в пределах возможностей однозначного измерения разностей фаз ±π радиан) информацию об азимуте и угле места β (с учетом формулы (5)), а разностные сигналы
, и описываемых выражениями (4), при формировании по правилу (34) разностных сигналов, принятых парами антенн. Вместе с тем разности фаз ϕi между сигналами, принятыми парами антенн, содержат "искаженную" (из-за взаимного влияния антенн и мачтового устройства) и однозначную (в пределах возможностей однозначного измерения разностей фаз ±π радиан) информацию об азимуте и угле места β (с учетом формулы (5)), а разностные сигналы  содержат "неискаженную" (из-за взаимного влияния антенн и мачтового устройства) и неоднозначную информацию об азимуте θ и угле места β ИРИ, которая содержится как в амплитудах ri, так и в фазах разностных сигналов. Кроме того, в случае использования в качестве антенн трехэлементной эквидистантной КАР идентичных осесимметричных антенн вибраторного типа с геометрическими размерами по их осям симметрии, соизмеримыми с длиной волны λ радиосигнала, достаточно "грубая", но однозначная информация об азимуте θ и угле места β ИРИ также содержится в амплитудах ui сигналов, принятых i-ыми антеннами трехэлементной КАР, которые с учетом (37), (60) и (8) описываются выражениями:
содержат "неискаженную" (из-за взаимного влияния антенн и мачтового устройства) и неоднозначную информацию об азимуте θ и угле места β ИРИ, которая содержится как в амплитудах ri, так и в фазах разностных сигналов. Кроме того, в случае использования в качестве антенн трехэлементной эквидистантной КАР идентичных осесимметричных антенн вибраторного типа с геометрическими размерами по их осям симметрии, соизмеримыми с длиной волны λ радиосигнала, достаточно "грубая", но однозначная информация об азимуте θ и угле места β ИРИ также содержится в амплитудах ui сигналов, принятых i-ыми антеннами трехэлементной КАР, которые с учетом (37), (60) и (8) описываются выражениями:

где Di - амплитудная диаграмма направленности i-ой антенны в составе трехэлементной эквидистантной КАР, определяемая по формуле:

Типовые графики амплитудных диаграмм направленности одной (первой) антенны D1(θ) в азимутальной плоскости (β=0) для трехэлементной КАР, характеризуемой отношением  , полученные методом математического моделирования с использованием формулы (66), представлены на фиг.3, где кривые 1, 2 и 3 получены при ; и соответственно. Кроме того, на фиг.3 соответствующими кривым 1, 2 и 3 символами отмечены результаты экспериментальных исследований D1(θ) при соответствующих отношениях . Необходимо отметить, что указанные амплитудные диаграммы направленности не нормированы в диапазоне изменения длин волн. Таким образом, для формирования однозначных пеленгационных характеристик, не подверженным методическим ошибкам пеленгования, обусловленным взаимным влиянием антенн и мачтового устройства, целесообразно использовать амплитуды и фазы разностных сигналов с устранением их неоднозначности на основе использования как разностей фаз ϕi между парами сигналов, так и соотношений амплитуд ui сигналов, принятых антеннами решетки. Вместе с тем в зависимости от отношения расстояния b между антеннами () к длине волны λ радиосигнала правила и качество формирования однозначных пеленгационных характеристик (вероятность правильного устранения неоднозначности пеленгования) является различными в случаях использования разностей фаз ϕi или соотношений амплитуд ui сигналов, принятых антеннами КАР.
, полученные методом математического моделирования с использованием формулы (66), представлены на фиг.3, где кривые 1, 2 и 3 получены при ; и соответственно. Кроме того, на фиг.3 соответствующими кривым 1, 2 и 3 символами отмечены результаты экспериментальных исследований D1(θ) при соответствующих отношениях . Необходимо отметить, что указанные амплитудные диаграммы направленности не нормированы в диапазоне изменения длин волн. Таким образом, для формирования однозначных пеленгационных характеристик, не подверженным методическим ошибкам пеленгования, обусловленным взаимным влиянием антенн и мачтового устройства, целесообразно использовать амплитуды и фазы разностных сигналов с устранением их неоднозначности на основе использования как разностей фаз ϕi между парами сигналов, так и соотношений амплитуд ui сигналов, принятых антеннами решетки. Вместе с тем в зависимости от отношения расстояния b между антеннами () к длине волны λ радиосигнала правила и качество формирования однозначных пеленгационных характеристик (вероятность правильного устранения неоднозначности пеленгования) является различными в случаях использования разностей фаз ϕi или соотношений амплитуд ui сигналов, принятых антеннами КАР.
Из формулы (30) измерения разностей фаз ϕi следует, что, в случае однозначного измерения всех трех разностей фаз ϕi, выполняется условие:

Согласно (67) любая из трех разностей фаз ϕm (m=1, 2 или 3) может быть определена путем суммирования двух других разностей фаз по формуле:
Поэтому, если хотя бы две из трех разностей фаз ϕi измерены однозначно, что возможно, если их абсолютные значения (модули) меньше π радиан, то третья (в том числе, максимальная по модулю) разность фаз ϕm может быть однозначно определена по формуле (68). Поэтому, для уменьшения вероятности аномальных ошибок при определении разностей фаз между сигналами, близкими к противофазным (модуль разностей фаз между которыми близок к π радиан), и искаженным из-за взаимного влияния антенн решетки в соответствии с (61) и воздействия шумов в соответствии с (14), необходимо: во-первых, определить упорядоченную совокупность разностей фаз ϕξ, ϕγ и ϕυ, определяемых по формуле (30), для которой выполняется условие:

где ξ, γ и ν - индексы, не равные между собой и принимающие одно из трех значений 1, 2 или 3; во-вторых, с использованием измеренных значений ϕξ и ϕγ определить по формуле (68) значение ϕν. Упорядоченная совокупность разностей фаз ϕξ, ϕγ и ϕν может быть определена непосредственным сравнением модулей указанных разностей фаз, как это осуществляется в прототипе [10], однако, с учетом согласно (61) наличия искажений Δϕi измеряемых разностей фаз, достигающих при размерах антенн, соизмеримых с длиной волны, значений порядка ±50° (см. фиг.2), а также - с учетом дополнительных погрешностей измерений разностей фаз σϕ, связанных с неравноточностью измерений при воздействии шумов и определяемых по формуле (14), указанную упорядоченную совокупность разностей фаз более предпочтительно определять на основе сравнения как амплитудных значений разностных сигналов ri, так и амплитудных значений ui сигналов, принятых антеннами трехэлементной КАР. Это связано со следующими особенностями азимутальных зависимостей ri и ui.
Амплитудные значения разностных сигналов ri в соответствии с (35) и (62) определяются выражением:

где 
Из сравнения (70) и (61) следует, что, так как ri не зависит от Δϕi, то упорядоченная совокупность разностей фаз (69) может быть определена более достоверно на основе определения упорядоченной совокупности по правилу:

Определение упорядоченной совокупности разности фаз (69) по правилу (71) позволяет устранить погрешности, обусловленные взаимным влиянием антенн и мачтового устройства, однако для уменьшения вероятности "перепутывания соседних" индексов ξ и γ или γ и ν в условиях воздействия шумов необходимо провести дополнительное сравнение амплитудных значений ui сигналов, принятых антеннами, которые, в свою очередь, согласно (65) и (66), определяются амплитудными диаграммами направленности Di антенн в составе трехэлементной КАР. Правила сравнения амплитудных значений ui сигналов, принятых антеннами, предназначенные для улучшения качества определения упорядоченной совокупности разности фаз (69) и, в конечном итоге, для разрешения неоднозначности пеленгования, следуют из анализа амплитудных диаграмм направленности Di, описываемых формулой (66), поясняемых графиками ДН первой антенны D1(θ), представленными на вышеупомянутой фиг.3, а также - на фиг.4, где приведены результаты измерений (в относительных единицах (отн. ед.)) ненормированных амплитудных азимутальных ДН D1 одной (первой) антенны трехэлементной КАР при  для различных отношений
для различных отношений  , изменяющихся в пределах от 0,3 до 0,66. Анализ формулы (66) и представленных теоретических (см. фиг.3) и экспериментальных (см. фиг.3 и фиг.4) результатов позволяет выявить следующие закономерности амплитудных ДН трехэлементной КАР: а) все амплитудные ДН Di при
, изменяющихся в пределах от 0,3 до 0,66. Анализ формулы (66) и представленных теоретических (см. фиг.3) и экспериментальных (см. фиг.3 и фиг.4) результатов позволяет выявить следующие закономерности амплитудных ДН трехэлементной КАР: а) все амплитудные ДН Di при  имеют явно выраженный минимум в азимутальных направлениях θmin.i, определяемых условиями:
имеют явно выраженный минимум в азимутальных направлениях θmin.i, определяемых условиями:

б) при неравномерность амплитудных ДН превышает 6 дБ; в) при  все амплитудные ДН Di имеют максимум в направлениях θmax.i, определяемых условиями:
все амплитудные ДН Di имеют максимум в направлениях θmax.i, определяемых условиями:

г) при крутизна изменения амплитудных ДН в районах минимумов и максимумов не превышает (0,04÷0,05) дБ/град и при отклонении минимумов (максимумов) амплитудных ДН на угол  уровень принимаемого радиосигнала возрастает (уменьшается) не более чем на (1,2÷1,5) дБ.
уровень принимаемого радиосигнала возрастает (уменьшается) не более чем на (1,2÷1,5) дБ.
Указанные закономерности форм амплитудных азимутальных ДН Di позволяет сформировать по формулам (38) и (39) коэффициенты Рi и Кi неравномерности диаграмм направленности, необходимые для повышения качества устранения неоднозначности пеленгования.
Коэффициенты Рi, определяемые по формуле (38), удовлетворяют условию: Рi≥1. Поэтому, чем меньше сравниваемые амплитуды un и uk сигналов  и
и  различаются между собой (то есть Рi стремится к единице), тем меньше истинное значение модулей разностей фаз между указанными сигналами, что и определяет предпочтительность использования формулы (40) по сравнению с формулой (71) для формирования упорядоченной совокупности разности фаз (69).
различаются между собой (то есть Рi стремится к единице), тем меньше истинное значение модулей разностей фаз между указанными сигналами, что и определяет предпочтительность использования формулы (40) по сравнению с формулой (71) для формирования упорядоченной совокупности разности фаз (69).
Коэффициенты Кi, определяемые по формуле (39), в диапазоне изменения длин волн  позволяют осуществлять селекцию принимаемых электромагнитных волн по четырем зонам в азимутальной плоскости: зоне равноточных измерений и трем зонам неравноточных измерений, соответствующим азимутальным сектором, определяемым из условий:
позволяют осуществлять селекцию принимаемых электромагнитных волн по четырем зонам в азимутальной плоскости: зоне равноточных измерений и трем зонам неравноточных измерений, соответствующим азимутальным сектором, определяемым из условий:

где i=1, 2, 3. При этом для выбранных по формуле (40) индексов ξ, γ и ν номеров антенн Аξ, Аγ и Аν по формуле (39) определяется коэффициент Кξ, который сравнивается с априорно известным средним значением Kmid коэффициентов Кi неравномерности ДН антенн в составе решетки и по формуле (41) определяется коэффициент р однозначности пеленгования. Значение параметра Kmid зависит от электродинамических размеров антенн (длины 2la по оси симметрии и диаметра осесимметричной вибраторной антенны, отнесенных к длине λ волны радиосигнала), отношения и отношения длины мачтового устройства к длине волны радиосигнала и находится в пределах, близких к единице. Так, например, усредненное в пределах диапазона изменения длин волн значение Кmid для трехэлементной КАР, амплитудные ДН которой представлены на фиг.4, составляет 0,84.
В связи с вышеупомянутым, в случае, если расстояние b между антеннами не превышает третьей части длины волны λ радиосигнала, то есть малая неравномерность амплитудных ДН, по формуле (43) с использованием двух измеренных разностей фаз ϕξ и ϕγ формируются три однозначные разности фаз Fi (i=1, 2, 3).
Минимально необходимое отношение сигнал/шум qmin, при котором для одного из самых неблагоприятных (с максимально возможной вероятностью возникновения аномальных ошибок устранения однозначности пеленгования по формуле (43)) случаев приема радиосигналов при , β=0, ϕξ=0 и  однозначно формируются три разности фаз Fi, определяется с учетом (14), (61), (63) и (64) в общем виде из условия:
однозначно формируются три разности фаз Fi, определяется с учетом (14), (61), (63) и (64) в общем виде из условия:

В частности, для приведенных на фиг.2 и фиг.3 характеристик (кривые 2) при коэффициенте а неравноточности измерений, равному отношению амплитуды наименьшего сигнала к амплитуде наибольшего сигнала и составляющему 0,6, из (75) следует, что для канала пеленгационного измерителя с наибольшей амплитудой сигнала отношение сигнал/шум qmin=4 (при этом отношение сигнал/шум для канала измерителя с наименьшей амплитудой сигнала составляет соответственно 0,6 qmin=2,4).
С учетом (43) и (61) для однозначных разностей фаз Fi получаем:

Так как выполняется условие:

то с учетом (70) и (76) однозначные амплитудные значения (с учетом знаков) разностных сигналов Ri, формируемые по формуле (42), могут быть представлены в виде:

В случае, если расстояние b между антеннами превышает третью часть длины волны λ радиосигнала, то есть проявляется существенная неравномерность амплитудных ДН, три однозначных амплитудных значения разностных сигналов Ri формируются по формуле (44) с использованием соответствующих амплитудных значений разностных сигналов ri, одной измеренной разности фаз ϕξ и значения коэффициента р однозначности пеленгования, полученного по результатам сравнения амплитудных значений сигналов ui в соответствии с (39) и (41). При этом выбранная по формуле (40) пара сигналов  и
и  между которыми в соответствии с (30) измеряется разность фаз ϕξ, используемая при формировании Rξ по формуле (44), принимается соответствующей парой антенн Аγ и Аν, расположенных на линии, наиболее близкой к фронту электромагнитной волны ИРИ. Это означает, что третья антенна Аξ, не входящая в состав выбранной пары антенн, размещается либо со стороны прихода фронта ЭМВ (в этом случае Кξ≥Кmid), либо со стороны, противоположной стороне прихода фронта ЭМВ (в этом случае Кξ<Кmid). Поэтому, в зависимости от результатов оценки коэффициента р однозначности пеленгования по формуле (41) и результатов сравнения взаимного расположения γ-ой пары антенн Аξ и Аν (сигналы, принятые которыми, используются для формирования rγ) и вышеупомянутой выбранной ξ-той пары антенн Аγ и Аν, по формуле (45), приводящему к определению значения коэффициента l, связанного с априорно выбранным в соответствии с (30)-(35) правилом сравнения сигналов, принятых последовательными парами антенн, по формуле (44) производится определение второго однозначного амплитудного значения разностных сигналов Rγ. Учитывая то, что, с одной стороны, Rξ, Rγ и Rvν связаны соотношением, аналогичным (67), а с другой стороны, следующим из условия (40) соотношением:
между которыми в соответствии с (30) измеряется разность фаз ϕξ, используемая при формировании Rξ по формуле (44), принимается соответствующей парой антенн Аγ и Аν, расположенных на линии, наиболее близкой к фронту электромагнитной волны ИРИ. Это означает, что третья антенна Аξ, не входящая в состав выбранной пары антенн, размещается либо со стороны прихода фронта ЭМВ (в этом случае Кξ≥Кmid), либо со стороны, противоположной стороне прихода фронта ЭМВ (в этом случае Кξ<Кmid). Поэтому, в зависимости от результатов оценки коэффициента р однозначности пеленгования по формуле (41) и результатов сравнения взаимного расположения γ-ой пары антенн Аξ и Аν (сигналы, принятые которыми, используются для формирования rγ) и вышеупомянутой выбранной ξ-той пары антенн Аγ и Аν, по формуле (45), приводящему к определению значения коэффициента l, связанного с априорно выбранным в соответствии с (30)-(35) правилом сравнения сигналов, принятых последовательными парами антенн, по формуле (44) производится определение второго однозначного амплитудного значения разностных сигналов Rγ. Учитывая то, что, с одной стороны, Rξ, Rγ и Rvν связаны соотношением, аналогичным (67), а с другой стороны, следующим из условия (40) соотношением:

получаем, что знак третьего однозначного амплитудного значения разностных сигналов Rγ противоположен знаку вышеупомянутого второго однозначного амплитудного значения разностных сигналов Rγ, что реализуется при определении Rγ по формуле (44).
Необходимо отметить, что максимальным предельным значением отношения , при котором в круговом азимутальном секторе реализуется достоверное определение трех однозначных амплитудных значений разностных сигналов Ri в соответствии с (44) следует считать  в связи со следующим обстоятельством. При для β=0 и направлений распространения ЭМВ вдоль линий, соединяющих любые пары антенн трехэлементной КАР, из (70) получаем:
в связи со следующим обстоятельством. При для β=0 и направлений распространения ЭМВ вдоль линий, соединяющих любые пары антенн трехэлементной КАР, из (70) получаем:

При этом упорядоченная совокупность индексов ξ, γ и ν порядковых номеров антенн, при которых выполняется условие (40), определяется только коэффициентами Р1, Р2 и Р3 неравномерности диаграмм направленности антенн в составе решетки. В случае  соответствие упорядоченной совокупности (71) и упорядоченной совокупности Рξ≤Рγ≤Рν нарушается, что приводит к снижению качества определения упорядоченной совокупности индексов ξ, γ и ν номеров антенн по формуле (40) и, соответственно, к увеличению вероятности появления аномальных ошибок пеленгования.
соответствие упорядоченной совокупности (71) и упорядоченной совокупности Рξ≤Рγ≤Рν нарушается, что приводит к снижению качества определения упорядоченной совокупности индексов ξ, γ и ν номеров антенн по формуле (40) и, соответственно, к увеличению вероятности появления аномальных ошибок пеленгования.
Минимально необходимое отношение сигнал/шум qmin, при котором для одного из самых неблагоприятных (с максимально возможной вероятностью возникновения аномальных ошибок устранения неоднозначности пеленгования по формуле (44)) случаев приема радиосигналов при , β=0 и  однозначно формируется разность фаз ϕξ (и, соответственно, Rξ, Rγ и Rν), определяется с учетом (14), (61), (63), (64), (38) и (40) в общем виде из условия:
однозначно формируется разность фаз ϕξ (и, соответственно, Rξ, Rγ и Rν), определяется с учетом (14), (61), (63), (64), (38) и (40) в общем виде из условия:
В частности, для приведенных на фиг.2 и фиг.3 характеристик (кривые 2) при коэффициенте а неравноточности измерений, составляющему 0,9 (так как при измерении разности фаз ϕξ используются сигналы Uγ и Uν с амплитудами uγ и uν, близкими по своему значению и существенно превышающими амплитуду uξ сигнала, не используемого для оценки вышеупомянутой разности фаз), и с учетом противоположности знаков измеряемой разности фаз и погрешности Δϕξ, обусловленной взаимным влиянием антенн (взаимное влияние между антеннами приводит к "замедлению" скорости распространения фронта ЭМВ между рассматриваемой парой антенн), из формулы (81) следует, что qmin≈2,3.
Необходимо отметить, что формирование трех однозначных амплитудных значений разностных сигналов Ri (i=1, 2, 3) по вышерассмотренной формуле (44), описываемых выражением (78), возможно даже в случае отсутствия сигнала в одной из трех антенн трехэлементной КАР, обусловленного полной компенсацией электромагнитного поля в точке размещения вышеупомянутой антенны из-за электродинамического взаимодействия антенн решетки и мачтового устройства. При этом также за счет упомянутого электродинамического взаимодействия уровни сигналов в двух других антеннах возрастают, что приводит к дополнительному улучшению чувствительности пеленгования и уменьшению случайных составляющих ошибок пеленгования σθr, определяемых по формуле (2). Вместе с тем, при указанных условиях (отсутствие сигнала в одном из трех каналов пеленгационного измерителя из-за электродинамического взаимодействия антенных элементов) ни один из рассмотренных аналогов [8-10] не обеспечивает возможность определения направления распространения ЭМВ.
Для упрощения методики определения азимута θR с использованием однозначных амплитудных значений разностных сигналов Ri, так же, как и в прототипе [10], в выражениях (78) первые функции синуса заменим аргументами. При этом выражения (78) с погрешностями "разноса" [1] можно представить в виде:

где hr - эффективная действующая длина пеленгационной пары антенн с разностной диаграммой направленности, определяемая с учетом (5) и (70) согласно выражению:
Путем известных тригонометрических преобразований числитель Х1 и знаменатель Х2 выражения (36) с учетом (82) и (6) можно представить в виде:


Из (84) и (85) непосредственно следует формула (36) оценки азимута θR источника радиосигнала с использованием трех однозначных амплитудных значений разностных сигналов Ri. Абсолютные значения и знаки ошибок "разноса" ΔθR, свойственные формуле (36) оценивания азимута θR и обусловленные использованием приближения вида sin(X)≈X при представлении R, в виде (82), зависят от θ, β и , подробно исследованы и проанализированы в ближайшем аналоге [10] и работе [7], где показано, что в наихудшем случае при , β=0 и  , где m=0, 1, 2, ...11, абсолютная ошибка "разноса" не превышает 0,9°. График зависимости модуля максимальных ошибок "разноса" |ΔθRmax| от отношения при β=0, свойственных формуле (36) оценивания азимута θR, представлен на фиг.5 в виде кривой 1. Необходимо отметить, что указанные методические ошибки оценки азимута θR по формуле (36) не зависят от электродинамического взаимодействия между антенными элементами решетки в отличие от способов пеленгования, основанных на сравнении разностей фаз между сигналами, принятыми парами антенн трехэлементной КАР. Так, в частности, на фиг.5 для сравнения представлены в виде кривых 2, 3 и 4 зависимости от отношения максимальных систематических ошибок |θmax| характерных для правила (12) определения азимута θ при различных отношениях общей длины 2la симметричных антенн к расстоянию b между антеннами в трехэлементной КАР.
, где m=0, 1, 2, ...11, абсолютная ошибка "разноса" не превышает 0,9°. График зависимости модуля максимальных ошибок "разноса" |ΔθRmax| от отношения при β=0, свойственных формуле (36) оценивания азимута θR, представлен на фиг.5 в виде кривой 1. Необходимо отметить, что указанные методические ошибки оценки азимута θR по формуле (36) не зависят от электродинамического взаимодействия между антенными элементами решетки в отличие от способов пеленгования, основанных на сравнении разностей фаз между сигналами, принятыми парами антенн трехэлементной КАР. Так, в частности, на фиг.5 для сравнения представлены в виде кривых 2, 3 и 4 зависимости от отношения максимальных систематических ошибок |θmax| характерных для правила (12) определения азимута θ при различных отношениях общей длины 2la симметричных антенн к расстоянию b между антеннами в трехэлементной КАР.
Определение по трем однозначным амплитудным значениям разностных сигналов Ri (i=1, 2, 3) параметра μ в соответствии с выражением (47) позволяет выявить наличие квадратурной составляющей помехового сигнала. Так, в общем случае одновременного приема ЭМП источников пеленгуемого и помехового сигналов, описываемых по формуле (3), и пренебрежимо малых составляющих радиосигналов, обусловленных внутренним шумом каналов пеленгационного измерителя, с учетом правила получения Ri, описываемого формулами (30)-(35), (37)-(45), и приближения вида sin(X)≈X параметр μ, описываемый выражением (47), можно представить в виде:

где qh - параметр, определяющий соотношение амплитуд и направлений распространения электромагнитных волн помехового и пеленгуемого радиосигналов, описываемый выражением:


|qh|≤1.
Из формулы (86) следует, что при выполнении условия  которое соответствует наличию квадратурной составляющей помехового сигнала μ=qh, а в случаях отсутствия квадратурной составляющей помехового сигнала (ϕho-ϕso=0 или ϕho-ϕso=π), совпадения линий распространения пеленгуемого и помехового сигналов (θh-θ=0 или θh-θ=π) или отсутствия помехового сигнала (Еh≪Es) μ=0. Необходимо также отметить, что при наличии составляющих радиосигналов, обусловленных внутренним шумом каналов пеленгационного измерителя, которыми по сравнению с уровнем пеленгуемого радиосигнала нельзя пренебречь (то есть при низких отношениях сигнал/шум q) значения параметра μ могут изменяться в пределах от 0 до 1 при изменении от q≫1 до q=qmin≈(1÷2) соответственно.
которое соответствует наличию квадратурной составляющей помехового сигнала μ=qh, а в случаях отсутствия квадратурной составляющей помехового сигнала (ϕho-ϕso=0 или ϕho-ϕso=π), совпадения линий распространения пеленгуемого и помехового сигналов (θh-θ=0 или θh-θ=π) или отсутствия помехового сигнала (Еh≪Es) μ=0. Необходимо также отметить, что при наличии составляющих радиосигналов, обусловленных внутренним шумом каналов пеленгационного измерителя, которыми по сравнению с уровнем пеленгуемого радиосигнала нельзя пренебречь (то есть при низких отношениях сигнал/шум q) значения параметра μ могут изменяться в пределах от 0 до 1 при изменении от q≫1 до q=qmin≈(1÷2) соответственно.
Таким образом, оценивание значения параметра μ по формуле (47) позволяет судить о достоверности результатов пеленгования, причем достоверность результатов пеленгования обратно пропорциональна величине параметра μ.
Для исключения зависимости разностей фаз ϕRi между разностными сигналами  и
и  от знаков лепестков их амплитудных диаграмм направленности определение вышеупомянутых разностей фаз ϕRi производится по формуле (46), которая с учетом (62), (70), (78), (5), (6) и (31)-(33) после известных тригонометрических преобразований представляется в виде:
от знаков лепестков их амплитудных диаграмм направленности определение вышеупомянутых разностей фаз ϕRi производится по формуле (46), которая с учетом (62), (70), (78), (5), (6) и (31)-(33) после известных тригонометрических преобразований представляется в виде:
Формула (88) с учетом взаимосвязей между индексами i, n и k, определяемых формулами (31)-(33), по существу описывает разности фаз ϕRi между k-ым и n-ым сигналами с амплитудами rk и rn соответственно, принятыми эквивалентными направленными электродинамически не взаимодействующими антеннами, фазовые центры которых расположены в точках Сk и Сn, обозначенных на фиг.1 и находящихся на серединах отрезков линий, соединяющих фазовые центры соответственно k-ой пары антенн Аi и Аn и n-ой пары антенн Аi и An. При этом вышеупомянутые эквивалентные направленные антенны образуют в плоскости пеленгования трехэлементную эквидистантную кольцевую антенную решетку с радиусом, меньшим в 2 раза по сравнению с антенной решеткой, образованной антеннами А1, А2 и А3 (см. фиг.1), однако, две из трех амплитуд сигналов, сформированных эквивалентными направленными антеннами согласно (8), (65) и (70), в среднем в (1,5÷2) раза превышают максимальную из трех амплитуд сигналов, принятых антеннами А1, А2 и А3, что приводит к улучшению отношения сигнал/шум q и компенсирует негативное влияние уменьшения радиуса rcaw решетки на границу потенциально достижимой точности пеленгования, определяемой по формуле (2).
Сравнение формул (61) и (88) показывает, что разности фаз ϕRi между разностными сигналами, в отличие от разностей фаз ϕi между сигналами, принятыми антеннами КАР, не искажены из-за электродинамического взаимодействия между антеннами и мачтовым устройством, что обеспечивает возможность определения азимута θ и угла места β с использованием ϕRi без методических погрешностей. Однако для азимутальных направлений, совпадающих или близких к линиям, проходящим через центр О КАР и любую из трех антенн А1, А2 или А3 (см. фиг.1), одна из трех амплитуд r1, r2 или r3 разностных сигналов, а именно r3, за счет "синусной" диаграммы направленности, определяемой формулой (70), может уменьшиться до значения, меньшего минимально необходимого уровня rmin разностных сигналов, при котором, согласно (14), разность фаз между сигналами измеряется со случайной средней квадратической ошибкой σϕ, обеспечивающей пеленгование источников радиоизлучения с требуемыми точностью и вероятностью. В этом случае достоверно может быть определена только одна из трех разностей фаз ϕR1, ϕR2 или ϕR3, а именно ϕRξ, которая определяется, согласно (46), между разностными сигналами  и
и  имеющими амплитуды rγ и rν, превышающими амплитуду rξ. Значение минимальной амплитуды rmin разностного сигнала, описываемое формулой (49), является априорно известной величиной, определяемой минимально необходимым отношением сигнал/шум qmin, обеспечивающем в соответствии с (2) пеленгование источников радиоизлучения с требуемыми точностью и вероятностью, и действующим значением напряжения внутреннего шума Ueff каналов формирования разностных сигналов пеленгационного измерителя, зависящим от аппаратной реализации радиоприемных каналов.
имеющими амплитуды rγ и rν, превышающими амплитуду rξ. Значение минимальной амплитуды rmin разностного сигнала, описываемое формулой (49), является априорно известной величиной, определяемой минимально необходимым отношением сигнал/шум qmin, обеспечивающем в соответствии с (2) пеленгование источников радиоизлучения с требуемыми точностью и вероятностью, и действующим значением напряжения внутреннего шума Ueff каналов формирования разностных сигналов пеленгационного измерителя, зависящим от аппаратной реализации радиоприемных каналов.
В связи с вышеизложенным, для выбора правила однозначного определения азимута θϕ источника радиосигнала с использованием разностей фаз ϕRi между разностными сигналами проводят проверку условия (48), при выполнении которого азимут θϕ определяют по формуле (50), а в противном случае - по формуле (51).
Так, в случае rξ≥rmin числитель Х1 и знаменатель Х2 выражения (50) с учетом (88) и (6) путем известных тригонометрических преобразований можно представить в виде:


Из формул (89) и (90) непосредственно следует правило (50) однозначного оценивания азимута θϕ источника радиосигнала с использованием трех разностей фаз ϕR1, ϕR2 и ϕR3 между разностными сигналами.
В случае, если rξ≥rmin, оценивание азимута θϕ производится, во-первых, с использованием только одной разности фаз ϕRξ, описываемой с учетом (88) и (6) выражением:

во-вторых, с привлечением информации о значении коэффициента р однозначности пеленгования, определяемого по формуле (41), которая позволяет разрешить неоднозначность функции arcsin(X) путем добавления слагаемого  , принимающего в зависимости от значения коэффициента р одно из двух значений 0 или π, и выбора знака функции arcsin(X) путем ее умножения на коэффициент р, что обеспечивает устранение ошибок "зеркального" оценивания азимута в случае добавления вышеупомянутого слагаемого, равного π, в-третьих, с учетом предположения, что пеленгуемый радиосигнал распространяется в виде поверхностной электромагнитной волны, при которой β=0 и, соответственно, cosβ=1. Из формулы (91) с учетом вышеупомянутых факторов непосредственно следует формула (51) однозначного оценивания азимута θϕ источника радиосигнала, которая в случае приема поверхностных сигналов обеспечивает получение несмещенной оценки азимута θ источника радиосигнала, а в случае приема пространственных сигналов позволяет оценить азимут с ошибками Δθsp, зависящими от углов β прихода пространственных волн, называемых "высотными" ошибками азимутальных радиопеленгаторов [1]. Для выбора правил однозначного определения азимута θ и оценивания угла β наклона фронта волны источника радиосигнала и суждении о достоверности результатов пеленгования по формуле (52) с учетом (53) производят сравнение результатов оценивания азимута θR и θϕ с использованием соответственно амплитудных значений разностных сигналов Ri и разностей фаз ϕRi между разностными сигналами (то есть с использованием амплитудных и фазовых пеленгационных характеристик), определяя при этом погрешность Δθ однозначной оценки азимута θ. Причем определение значения параметра m по формуле (53) позволяет исключить аномальные ошибки определения погрешности Δθ для азимутов ИРИ, близких к 0°. Так, например, в случае, если θR=359°, а θϕ=1°, в соответствии с (53) получаем: |θR-θϕ|=|359°-1°|=358°>180°=π и, соответственно, m=1 и Δθ=|358°-360°|=|2°|=2°.
, принимающего в зависимости от значения коэффициента р одно из двух значений 0 или π, и выбора знака функции arcsin(X) путем ее умножения на коэффициент р, что обеспечивает устранение ошибок "зеркального" оценивания азимута в случае добавления вышеупомянутого слагаемого, равного π, в-третьих, с учетом предположения, что пеленгуемый радиосигнал распространяется в виде поверхностной электромагнитной волны, при которой β=0 и, соответственно, cosβ=1. Из формулы (91) с учетом вышеупомянутых факторов непосредственно следует формула (51) однозначного оценивания азимута θϕ источника радиосигнала, которая в случае приема поверхностных сигналов обеспечивает получение несмещенной оценки азимута θ источника радиосигнала, а в случае приема пространственных сигналов позволяет оценить азимут с ошибками Δθsp, зависящими от углов β прихода пространственных волн, называемых "высотными" ошибками азимутальных радиопеленгаторов [1]. Для выбора правил однозначного определения азимута θ и оценивания угла β наклона фронта волны источника радиосигнала и суждении о достоверности результатов пеленгования по формуле (52) с учетом (53) производят сравнение результатов оценивания азимута θR и θϕ с использованием соответственно амплитудных значений разностных сигналов Ri и разностей фаз ϕRi между разностными сигналами (то есть с использованием амплитудных и фазовых пеленгационных характеристик), определяя при этом погрешность Δθ однозначной оценки азимута θ. Причем определение значения параметра m по формуле (53) позволяет исключить аномальные ошибки определения погрешности Δθ для азимутов ИРИ, близких к 0°. Так, например, в случае, если θR=359°, а θϕ=1°, в соответствии с (53) получаем: |θR-θϕ|=|359°-1°|=358°>180°=π и, соответственно, m=1 и Δθ=|358°-360°|=|2°|=2°.
Полученное значение погрешности Δθ сравнивают с априорно известным значением максимально допустимой ошибки Δθmax определения азимута, которое определяется: во-первых, наличием вышеупомянутых ошибок "разноса", характерных для правила оценивания азимута θR по формуле (36), максимальное значение которых для наихудших случаев не превышает 0,9° и которые могут быть отнесены к систематическим ошибкам пеленгования, характеризуемым систематической средней квадратической ошибкой σθs1, значение которой, определенное по формуле "три сигма" [4], составляет:  ; во-вторых, наличием систематической средней квадратической ошибки σθs2 пеленгования, обусловленной неидентичностью каналов пеленгационного измерителя, которая при современных способах калибровки каналов пеленгационного измерителя [2] составляет: σθs2≈0,5°; в-третьих, требуемым в соответствии с [3] предельно допустимым значением случайной средней квадратической ошибки σθr, обусловленной воздействием внутренних шумов пеленгационного измерителя при минимальной напряженности электромагнитного поля пеленгуемого радиосигнала, характеризующей, в соответствии с (2), предельную чувствительность радиопеленгатора, которую целесообразно выбирать из условия:
; во-вторых, наличием систематической средней квадратической ошибки σθs2 пеленгования, обусловленной неидентичностью каналов пеленгационного измерителя, которая при современных способах калибровки каналов пеленгационного измерителя [2] составляет: σθs2≈0,5°; в-третьих, требуемым в соответствии с [3] предельно допустимым значением случайной средней квадратической ошибки σθr, обусловленной воздействием внутренних шумов пеленгационного измерителя при минимальной напряженности электромагнитного поля пеленгуемого радиосигнала, характеризующей, в соответствии с (2), предельную чувствительность радиопеленгатора, которую целесообразно выбирать из условия:

При этом, учитывая (1) и (92) с использованием критерия "три сигма" [4], значение максимально допустимой ошибки Δθmax можно получить по формуле:

По результатам проверки выполнения условия:

и условия (48) выбирают правила однозначного определения азимута θ и оценивания угла β наклона фронта волны источника радиосигнала. Так, в случаях, если rξ≥rmin или rξ<rmin и Δθ≤Δθmax, оценка азимута θϕ является достоверной и определение азимута θ производится по формуле (54) путем усреднения результатов оценивания азимута θR и θϕ с учетом значения параметра m, определяемого по формуле (53), что позволяет уменьшить методическую составляющую ошибок пеленгования, свойственную формуле (36), в два раза. В случае, если rξ<rmin и Δθ>Δθmax, оценка азимута θϕ, полученная по формуле (51), является смещенной, в связи с чем определение азимута θ производится в соответствии с (55), только с использованием оценки азимута θR. Необходимо отметить, что при выполнении условия rξ <rmin, то есть в случаях, если линия распространения электромагнитной волны близка по угловой ориентации с линией, проходящей через центр О КАР и фазовый центр одной из антенн КАР, ошибки "разноса", свойственные формуле (36), не достигают своих максимальных значений.
В случае, если rξ≥rmin с учетом взаимосвязей между измеренными значениями ϕR1, ϕR2, ϕR3, с одной стороны, и параметрами b, λ, θ и β, с другой стороны, описываемых выражениями (89) и (90), можно получить следующее равенство:

С использованием известных тригонометрических преобразований и ограничивая значение функции f(х) по модулю и по уровню в соответствии с (59), что необходимо для получения действительных значений функции arccos(X) в случае возникновения ошибок определения ϕRi, из-за воздействия шумов и помех, из (95) получаем формулу (56) оценивания угла β наклона фронта волны источника радиосигнала без методических ошибок, обусловленных электродинамическим взаимодействием антенн и мачтового устройства.
В случае, если rξ<rmin и Δθ≤Δθmax, оценки θR и θϕ азимута, полученные по формулам (36) и (51), совпадают, что подтверждает правомочность допущения cosβ=1, используемого при определении формулы (51) с учетом (91), то есть пеленгуемый сигнал распространяется в виде поверхностной электромагнитной волны, при которой β=0, что соответствует формуле (57) оценивания угла β наклона фронта волны источника радиосигнала.
А в случае, если rξ<rmin и Δθ>Δθmax, оценки θR и θϕ азимута, полученные по формулам (36) и (51), не совпадают, что свидетельствует о неправомочности допущения cosβ=1, используемого при определении формулы (51) с учетом (91), то есть пеленгуемый сигнал распространяется в виде пространственной электромагнитной волны, наклон фронта βsp которой не известен и может находиться в пределах  (причем cosβsp<1), что соответствует формуле (58) оценивания угла β наклона фронта волны источника радиосигнала.
(причем cosβsp<1), что соответствует формуле (58) оценивания угла β наклона фронта волны источника радиосигнала.
Величина погрешности Δθ однозначной оценки азимута, определяемой по формуле (52), в случае одновременного приема пеленгуемого и помехового радиосигналов характеризуется обратно пропорциональной зависимостью от отношения напряженности поля пеленгуемого к напряженности поля помехового радиосигналов, то есть обратно пропорциональна достоверности результатов пеленгования. Необходимо отметить, что в абсолютном большинстве практически важных случаев при одновременном приеме пеленгуемого и некоррелированного с ним по фазе и направлению распространения помехового радиосигналов выполняется условие (48), что приводит к определению θ и β по формулам (54) и (56) соответственно, а по значению величины Δθ можно судить о достоверности полученных результатов пеленгования.
Совокупность полученных значений погрешности Δθ оценки азимута и вышеупомянутого параметра μ, обратно пропорциональных качеству результатов пеленгования, позволяет повысить вероятность правильного суждения о достоверности результатов определения азимута θ и угла β наклона фронта волны источника радиосигнала.
Радиопеленгатор, реализующий предложенный способ радиопеленгования (фиг.6), содержит три антенны 1.1, 1.2 и 1.3 (идентичные ненаправленные осесимметричные вибраторного типа), образующие в плоскости пеленгования эквидистантную кольцевую решетку, причем геометрические размеры антенн 1.1, 1.2 и 1.3 по их осям симметрии соизмеримы с длиной волны радиосигнала, а расстояние между антеннами 1.1, 1.2 и 1.3 не превышает двух третьих длины волны радиосигнала. Устройство имеет три идентичных радиоприемных блока (РПБ) 2.1, 2.2 и 2.3, выполненных с общим гетеродином, три блока измерения разности фаз (БИРФ) 3.1, 3.2 и 3.3, три блока формирования разностных сигналов (БФРС) 4.1, 4.2 и 4.3, блок формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн (БФКН) 5, компаратор 6, вычислитель коэффициента однозначности пеленгования (ВКОП) 7, блок формирования однозначных амплитудных значений разностных сигналов (БФОА) 8, вычислитель шумового порогового коэффициента (ВШПК) 9, блок определения разности фаз между разностными сигналами (БОРФ) 10, амплитудный вычислитель азимута (АВА) 11, вычислитель квадратурной составляющей помехового сигнала (ВКСП) 12, фазовый вычислитель азимута (ФВА) 13, вычислитель погрешности оценки азимута (ВПОА) 14, вычислитель азимутального порогового коэффициента (ВАПК) 15, вычислитель угла места (ВУМ) 16, блок определения азимута (БОА) 17, датчик параметров вычислений (ДПВ) 18 и генератор управляющих сигналов (ГУС) 19.
При этом выходы антенн 1.1, 1.2 и 1.3 подсоединены к входам соответствующих РПБ 2.1, 2.2 и 2.3. Пара выходов первого РПБ 2.1 подсоединена соответственно к вторым парам входов вторых БИРФ 3.2 и БФРС 4.2 и первым парам входов БФКН 5 и третьих БИРФ 3.3 и БФРС 4.3. Пара выходов второго РПБ 2.2 подсоединена соответственно к первым парам входов первых БИРФ 3.1 и БФРС 4.1 и вторым парам входов БФКН 5 и третьих БИРФ 3.3 и БФРС 4.3. Пара выходов третьего РПБ 2.3 подсоединена соответственно к вторым парам входов первых БИРФ 3.1 и БФРС 4.1, третьей паре входов БФКН 5 и первым парам входов вторых БИРФ 3.2 и БФРС 4.2. Выходы БИРФ 3.1, БИРФ 3.2 и БИРФ 3.3 подсоединены соответственно к первому, второму и третьему входам БФОА 8. Первый выход первого БФРС 4.1 подсоединен к объединенным четвертому входу БФОА 8 и первым входам компаратора 6 и ВШПК 9. Первый выход второго БФРС 4.2 подсоединен к объединенным пятому входу БФОА 8 и вторым входам компаратора 6 и ВШПК 9. Первый выход третьего БФРС 4.3 подсоединен к объединенным шестому входу БФОА 8 и третьим входам компаратора 6 и ВШПК 9. Второй и третий выходы БФРС 4.2 и 4.3 подсоединены соответственно к первому, второму, третьему, четвертому, пятому и шестому входам БОРФ 10. Первый, второй и третий выходы компаратора 6 подсоединены соответственно к седьмому, восьмому и девятому входам БФОА 8, а первый выход компаратора 6, кроме того, подсоединен к объединенным четвертому входу ВШПК 9 и первым входам ВКОП 7 и ФВА 13. Первый, второй, третий, четвертый, пятый и шестой выходы БФКН 5 подсоединены соответственно к четвертому, пятому и шестому входам компаратора 6 и второму, третьему и четвертому входам ВКОП 7. Выход ВКОП 7 подсоединен к объединенным десятому входу БФОА 8 и второму входу ФВА 13. Первый, второй и третий выходы БФОА 8 подсоединены соответственно к объединенным седьмому входу БОРФ 10 и первым входам АВА 11 и ВКСП 12, к объединенным восьмому входу БОРФ 10 и вторым входам АВА 11 и ВКСП 12 и к объединенным девятому входу БОРФ 10 и третьим входам АВА 11 и ВКСП 12. Первый, второй и третий выходы БОРФ 10 подсоединены соответственно к объединенным третьим входам ФВА 13 и ВУМ 16, к объединенным четвертым входам ФВА 13 и ВУМ 16 и к объединенным пятым входам ФВА 13 и ВУМ 16. Выход ВШПК 9 подсоединен к объединенным первому входу БОА 17 и шестым входам ФВА 13 и ВУМ 16. Выход ФВА 13 подсоединен к объединенным первому входу ВПОА 14 и второму входу БОА 17. Выход АВА 11 подсоединен к объединенным второму входу ВПОА 14 и третьему входу БОА 17. Выход ВПОА 14 подсоединен к первому входу ВАПК 15. Выход ВАКП 15 подсоединен к объединенным седьмому входу ВУМ 16 и четвертому входу БОА 17. Первый выход ДПВ 18 подсоединен к объединенным одиннадцатому входу БФОА 8, седьмому входу ФВА 13 и первому входу ВУМ 16. Второй выход ДПВ 18 подсоединен к объединенным двенадцатому входу БФОА 8, восьмому входу ФВА 13 и второму входу ВУМ 16. Третий, четвертый и пятый выходы ДПВ 18 подсоединены соответственно к пятому входу ВКОП 7, пятому входу ВШПК 9 и второму входу ВАПК 15. Выход ГУС 19 подсоединен к управляющим входам ДПВ 18 и РПБ 2.1, 2.2 и 2.3. Выходы БОА 17 и ВУМ 16 являются выходами значений соответственно азимута θ и угла β наклона фронта волны источника радиосигнала, а выходы ВКСП 12 и ВПОА 14 являются выходами параметров достоверности результатов пеленгования μ и Δθ соответственно.
Радиопеленгатор (фиг.6), реализующий предложенный способ радиопеленгования, работает следующим образом.
Радиосигналы, принятые идентичными антеннами 1.1, 1.2 и 1.3, описываемые вышеприведенными выражениями (3), с их выходов поступают на входы соответствующих РПБ 2.1, 2.2 и 2.3. По команде, поступающей с выхода ГУС 19, сигналы  , поступившие на входы РПБ 2.1, 2.2 и 2.3, подвергаются типовым для современных радиоприемных блоков преобразованиям: синхронной фильтрации в полосе частот ΔF, усилению, преобразованию на промежуточную частоту с идентичными общими комплексными коэффициентами передачи, получаемыми либо с использованием идентичных РПБ, либо с использованием результатов калибровки неидентичности общих комплексных коэффициентов передачи РПБ, синхронному преобразованию сигналов промежуточной частоты в цифровые сигналы
, поступившие на входы РПБ 2.1, 2.2 и 2.3, подвергаются типовым для современных радиоприемных блоков преобразованиям: синхронной фильтрации в полосе частот ΔF, усилению, преобразованию на промежуточную частоту с идентичными общими комплексными коэффициентами передачи, получаемыми либо с использованием идентичных РПБ, либо с использованием результатов калибровки неидентичности общих комплексных коэффициентов передачи РПБ, синхронному преобразованию сигналов промежуточной частоты в цифровые сигналы  путем дискретизации по уровню и времени принимаемых сигналов Ui(mdΔt) и осуществления дискретного преобразования Фурье (в частности - быстрого преобразования Фурье (БПФ)) с получением действительной
путем дискретизации по уровню и времени принимаемых сигналов Ui(mdΔt) и осуществления дискретного преобразования Фурье (в частности - быстрого преобразования Фурье (БПФ)) с получением действительной  и мнимой
и мнимой  составляющих сигналов, являющихся цифровыми эквивалентами принимаемых радиосигналов [11. Марпл мл. С.Л. Цифровой спектральный анализ и его приложения: Пер. с англ. - М.: Мир, 1990. - 584 с.]:
составляющих сигналов, являющихся цифровыми эквивалентами принимаемых радиосигналов [11. Марпл мл. С.Л. Цифровой спектральный анализ и его приложения: Пер. с англ. - М.: Мир, 1990. - 584 с.]:

где Δt - интервал равномерной дискретизации сигналов по времени;
 - объем обрабатываемого массива временных отсчетов радиосигналов;
- объем обрабатываемого массива временных отсчетов радиосигналов;
ΔT - требуемое (допустимое при фильтрации сигналов в полосе частот ΔF) время наблюдения радиосигналов;
md=0, 1, ...М-1 - порядковые номера временных отсчетов радиосигналов;
kω=0, 1, ...М-1 - номер спектральных составляющих радиосигналов.
При этом после осуществления преобразования Фурье согласно вышеупомянутому выражению принятые радиосигналы представляются в виде М комплексных спектральных составляющих, частотное расстояние между которыми, то есть фактически частотное разрешение, составляет  . В дальнейшем для упрощения обработки используют только М/2 комплексных спектральных составляющих, а остальные М/2 спектральных составляющих, соответствующих отрицательным частотам, полагают равными нулю. Таким образом, прием совокупности радиосигналов, отфильтрованных РПБ 2.1, 2.2 и 2.3 в широкой полосе частот ΔF с последующим разделением по частоте методом преобразования Фурье эквивалентен одновременному приему сигналов в соответствующих элементарных частотных каналах (ЭЧК) с шириной полосы
. В дальнейшем для упрощения обработки используют только М/2 комплексных спектральных составляющих, а остальные М/2 спектральных составляющих, соответствующих отрицательным частотам, полагают равными нулю. Таким образом, прием совокупности радиосигналов, отфильтрованных РПБ 2.1, 2.2 и 2.3 в широкой полосе частот ΔF с последующим разделением по частоте методом преобразования Фурье эквивалентен одновременному приему сигналов в соответствующих элементарных частотных каналах (ЭЧК) с шириной полосы  и общим количеством М/2. Указанное обстоятельство обеспечивает получение высокой чувствительности РПБ (за счет уменьшения действующего значения напряжения Ueff внутреннего шума, обратно пропорционального величине
и общим количеством М/2. Указанное обстоятельство обеспечивает получение высокой чувствительности РПБ (за счет уменьшения действующего значения напряжения Ueff внутреннего шума, обратно пропорционального величине  ) при одновременном увеличении быстродействия радиопеленгатора и повышении частотной избирательности РПБ. Необходимо отметить, что для реализации предложенного способа пеленгования возможно также осуществление поочередной синхронной фильтрации и преобразования сигналов в последовательных парах РПБ 2.1 и РПБ 2.2, РПБ 2.2 и РПБ 2.3 и, наконец, РПБ 2.3 и РПБ 2.1 последовательно в интервалах ΔT1, ΔT2 и ΔT3 времени наблюдения сигналов соответственно. В этом случае совокупность трех РПБ 2.1, 2.2 и 2.3 может быть реализована с использованием соответствующей коммутации входов и выходов только двух физически существующих РПБ, однако, при этом минимально необходимое для осуществления пеленгования общее время ΔTΣ наблюдения сигналов по сравнению с временем ΔT наблюдения сигналов при реализации способа пеленгования с синхронными фильтрацией и преобразованием сигналов одновременно в трех РПБ 2.1, 2.2 и 2.3 увеличивается в три раза: ΔTΣ=ΔT1+ΔT2+ΔT3=3ΔT.
) при одновременном увеличении быстродействия радиопеленгатора и повышении частотной избирательности РПБ. Необходимо отметить, что для реализации предложенного способа пеленгования возможно также осуществление поочередной синхронной фильтрации и преобразования сигналов в последовательных парах РПБ 2.1 и РПБ 2.2, РПБ 2.2 и РПБ 2.3 и, наконец, РПБ 2.3 и РПБ 2.1 последовательно в интервалах ΔT1, ΔT2 и ΔT3 времени наблюдения сигналов соответственно. В этом случае совокупность трех РПБ 2.1, 2.2 и 2.3 может быть реализована с использованием соответствующей коммутации входов и выходов только двух физически существующих РПБ, однако, при этом минимально необходимое для осуществления пеленгования общее время ΔTΣ наблюдения сигналов по сравнению с временем ΔT наблюдения сигналов при реализации способа пеленгования с синхронными фильтрацией и преобразованием сигналов одновременно в трех РПБ 2.1, 2.2 и 2.3 увеличивается в три раза: ΔTΣ=ΔT1+ΔT2+ΔT3=3ΔT.
Действительные  и мнимые
и мнимые  спектральные составляющие сигналов с пары выходов РПБ 2.1 поступают одновременно на вторые пары входов БИРФ 3.2 и БФРС 4.2 и первые пары входов БФКН 5, БИРФ 3.3 и БФРС 4.3. Действительные
спектральные составляющие сигналов с пары выходов РПБ 2.1 поступают одновременно на вторые пары входов БИРФ 3.2 и БФРС 4.2 и первые пары входов БФКН 5, БИРФ 3.3 и БФРС 4.3. Действительные  и мнимые
и мнимые  спектральные составляющие сигналов с пары выходов РПБ 2.2 поступают одновременно на первые пары входов БИРФ 3.1 и БФРС 4.1 и вторые пары входов БФКН 5, БИРФ 3.3 и БФРС 4.3. Действительные
спектральные составляющие сигналов с пары выходов РПБ 2.2 поступают одновременно на первые пары входов БИРФ 3.1 и БФРС 4.1 и вторые пары входов БФКН 5, БИРФ 3.3 и БФРС 4.3. Действительные  и мнимые
и мнимые  спектральные составляющие сигналов с пары выходов РПБ 2.3 поступают одновременно на вторые пары входов БИРФ 3.1 и БФРС 4.1, третью пару входов БФКН 5 и первые входов БИРФ 3.2 и БФРС 4.2.
спектральные составляющие сигналов с пары выходов РПБ 2.3 поступают одновременно на вторые пары входов БИРФ 3.1 и БФРС 4.1, третью пару входов БФКН 5 и первые входов БИРФ 3.2 и БФРС 4.2.
В БИРФ 3.1, 3.2 и 3.3 одновременно или поочередно по формуле (30) производится определение разностей фаз соответственно ϕ1, ϕ2 и ϕ3 между парами сигналов, одновременно поступившими соответственно на их первые и вторые пары входов.
В БФРС 4.1, 4.2 и 4.3 одновременно или поочередно по формулам (34) и (35) производится формирование разностных сигналов соответственно  ,
,  и
и  и их амплитудных значений r1, r2 и r3 с использованием пар сигналов, одновременно поступившим соответственно на их первые и вторые пары входов.
и их амплитудных значений r1, r2 и r3 с использованием пар сигналов, одновременно поступившим соответственно на их первые и вторые пары входов.
В БФКН 5 по формулам (37), (38) и (39) производится определение амплитудных значений u1, u2 и u3 сигналов, принятых антеннами 1.1, 1.2 и 1.3, и формирование коэффициентов Р1, Р2, Р3, К1, К2, К3 неравномерности диаграмм направленности антенн с использованием пар сигналов, одновременно или поочередно поступивших на три пары входов БФКН5.
Сигналы, соответствующие измеренным разностям фаз ϕ1, ϕ2 и ϕ3, с выходов БИРФ 3.1, 3.2 и 3.3 соответственно поступают на первый, второй и третий входы БФОА 8. Сигналы, соответствующие сформированным амплитудным значениям r1, r2 и r3 разностных сигналов, с первых выходов БФРС 4.1, 4.2 и 4.3 поступают соответственно на объединенные четвертый вход БФОА 8 и первые входы компаратора 6 и ВШПК 9, на объединенные пятый вход БФОА 8 и вторые входы компаратора 6 и ВШПК 9 и на объединенные шестой вход БФОА 8 и третьи входы компаратора 6 и ВШПК 9. А сигналы, соответствующие действительным  и мнимым
и мнимым  спектральным составляющим разностных сигналов
спектральным составляющим разностных сигналов  (i=1, 2, 3) соответственно с вторых и третьих выходов БФРС 4.1, 4.2 и 4.3 поступают соответственно на первый, второй, третий, четвертый, пятый и шестой входы БОРФ 10.
(i=1, 2, 3) соответственно с вторых и третьих выходов БФРС 4.1, 4.2 и 4.3 поступают соответственно на первый, второй, третий, четвертый, пятый и шестой входы БОРФ 10.
Сигналы, соответствующие сформированным коэффициентам Р1, Р2 и Р3 неравномерности диаграмм направленности антенн, с первого, второго и третьего выходов БФКН 5 поступают соответственно на четвертый, пятый и шестой входы компаратора 6, где из трех значений индексов 1,2 или 3 порядковых номеров антенн выбираются одно значение ξ, одно значение γ и одно значение ν, не равные между собой, для которых выполняется условие (40). Сигнал, соответствующий выбранному значению ξ индекса номера антенны, с первого выхода компаратора 6 поступает на объединенные седьмой вход БФОА 8, четвертый вход ВШПК 9 и первые входы ВКОП 7 и ФВА 13, а сигналы, соответствующие выбранным значениям γ и ν индексов номеров антенн, с второго и третьего выходов компаратора 6 поступают соответственно на восьмой и девятый входы БФОА 8.
Сигналы, соответствующие сформированным коэффициентам К1, К2 и К3 неравномерности диаграмм направленности антенн, с четвертого, пятого и шестого выходов БФКН 5 поступают соответственно на второй, третий и четвертый входы ВКОП 7, на пятый вход которого с третьего выхода ДПВ 18 поступает сигнал, соответствующий априорно известному среднему значению Кmid коэффициентов неравномерности диаграмм направленности антенн в составе решетки. В ВКОП 7 по формуле (41) производится определение коэффициента р однозначности пеленгования. Сигнал, соответствующий значению коэффициента р однозначности пеленгования, с выхода ВКОП 7 поступает на объединенные десятый вход БФОА 8 и второй вход ФВА 13. Сигнал, соответствующий значению расстояния b между антеннами, с первого выхода ДПВ 18 поступает на объединенные одиннадцатый вход БФОА 8, седьмой вход ФВА 13 и первый вход ВУМ 16.
По команде, поступающей с выхода ГУС 19 на управляющий вход ДПВ 18, в ДПВ 18 формируется сигнал, соответствующий длине волны λ радиосигнала, который со второго выхода ДПВ 18 поступает на объединенные двенадцатый вход БФОА 8, восьмой вход ФВА 13 и второй вход ВУМ 16.
В БФОА 8 производится формирование трех однозначных амплитудных значений разностных сигналов R1, R2 и R3 по формуле (42), если b≤0,3λ, или по формуле (44), если b>0,3λ. Сигналы, соответствующие сформированным трем однозначным амплитудным значениям разностных сигналов R1 R2 и R3, с первого, второго и третьего выходов БФОА 8 поступают соответственно на объединенные седьмой вход БОРФ 10 и первые входы АВА 11 и ВКСП 12, на объединенные восьмой вход БОРФ 10 и вторые входы АВА 11 и ВКСП 12 и на объединенные девятый вход БОРФ 10 и третьи входы АВА 11 и ВКСП 12.
В БОРФ 10 по формуле (46) определяются разности фаз ϕR1, ϕR2 и ϕR3 между разностными сигналами, а сигналы, соответствующие сформированным разностям фаз ϕR1, ϕR2 и ϕR3, с первого, второго и третьего выходов БОРФ 10 поступают соответственно на объединенные третьи, на объединенные четвертые и объединенные пятые входы ФВА 13 и ВУМ 16.
Сигнал, соответствующий априорно известной минимальной амплитуде rmin разностных сигналов, с четвертого выхода ДПВ 18 поступает на пятый вход ВШПК 9, где по формуле (48) проводится проверка выполнения условия превышения минимальной амплитуды rξ разностных сигналов относительно априорно известной минимальной амплитуды rmin разностных сигналов. Сигнал, соответствующий результату проверки выполнения условия (48) в виде логической единицы, если условие (48) выполняется, или логического нуля, если условие (48) не выполняется, с выхода ВШПК 9 поступает на объединенные шестые входы ФВА 13 и ВУМ 16 и первый вход БОА 17.
В ФВА 13 производится определение азимута θϕ источника радиосигнала с использованием разностей фаз ϕR1, ϕR2 и ϕR3 между разностными сигналами по формуле (50) в случае, если на шестой вход ФВА 13 поступает сигнал логической единицы, или по формуле (51) в случае, если на шестой вход ФВА 13 поступает сигнал логического нуля.
Сигнал, соответствующий азимуту θ источника радиосигнала, с выхода ФВА 13 поступает на объединенные первый вход ВПОА 14 и второй вход БОА 17.
В АВА 11 производится определение азимута θR источника радиосигнала с использованием однозначных амплитудных значений разностных сигналов R1, R2 и R3 по формуле (36). Сигнал, соответствующий азимуту θR источника радиосигнала, с выхода АВА 11 поступает на объединенные второй вход ВПОА 14 и третий вход БОА 17.
В ВПОА 14 по формуле (52) производится определение погрешности Δθ оценки азимута. Сигнал, соответствующий погрешности Δθ оценки азимута, с выхода ВПОА 14 поступает на первый вход ВАПК 15, на второй вход которого с пятого выхода ДПВ 18 поступает сигнал, соответствующий априорно известному значению максимально допустимой ошибки Δθmax определения азимута.
В ВАПК 15 формируется сигнал в виде логической единицы в случае, если Δθ≤Δθmax, или сигнал в виде логического нуля в случае, если Δθ>Δθmax, который с выхода ВАПК 15 поступает на объединенные седьмой вход ВУМ 16 и четвертый вход БОА 17.
В БОА 17 производится определение азимута θ источника радиосигнала по формуле (54) в случае, если хотя бы на один из его первого или четвертого входов поступает сигнал логической единицы, или по формуле (55) в случае, если на его первый и второй входы поступают сигналы логического нуля.
В ВУМ 16 производится оценивание угла β наклона фронта волны источника радиосигнала по формуле (56) в случае, если на его шестой вход поступает сигнал логической единицы, по формуле (57), если на его шестой вход поступает сигнал логического нуля, а на седьмой вход - сигнал логической единицы, или по формуле (58) в случае, если на его шестой и седьмой входы поступают сигналы логического нуля.
В ВКСП 12 по формуле (47) производится определение значения параметра μ, характеризующего наличие квадратурной составляющей помехового сигнала.
Сигналы с входов БОА 17 и ВУМ 16 соответствуют значениям соответственно азимута θ и угла β наклона фронта волны источника радиосигнала, полученным радиопеленгатором, а сигналы с выходов ВКСП 12 и ВПОА 14 соответствуют значениям соответственно параметра μ и погрешности Δθ определения азимута источника радиосигнала, по которым судят о достоверности результатов пеленгования источников радиоизлучения.
В радиопеленгаторе, реализующем предложенный способ радиопеленгования, используются известные типовые для радиоприемных устройств блоки, различные варианты осуществления которых описаны в ряде научно-технических источников информации. Конкретные функциональные схемы отдельных блоков могут отличаться функциональными схемами их выполнения, конструктивной и элементной базами, связями между функциональными элементами, однако обобщенная функциональная схема (фиг.6), описывающая заявленное устройство независимым пунктом формулы, сохраняется.
Рекомендуемое при конструктивном исполнении осесимметричных антенн 1.1, 1.2 и 1.3 вибраторного типа отношение геометрических размеров 2la по их осям симметрии к расстоянию b между антеннами в составе плоской эквидистантной трехэлементной КАР составляет  , где la - длина "плеча" для симметричных антенн, размещаемых на мачтовом устройстве, и общая длина для несимметричных антенн вибраторного типа, размещаемых на плоской подстилающей поверхности. При вышеупомянутом отношении
, где la - длина "плеча" для симметричных антенн, размещаемых на мачтовом устройстве, и общая длина для несимметричных антенн вибраторного типа, размещаемых на плоской подстилающей поверхности. При вышеупомянутом отношении  и выборе отношения диаметра da осесимметричных антенн вибраторного типа к геометрическому размеру 2la антенн по их осям симметрии в пределах
и выборе отношения диаметра da осесимметричных антенн вибраторного типа к геометрическому размеру 2la антенн по их осям симметрии в пределах  рекомендуемые средние значения Кmid диаграмм направленности антенн в составе решетки выбираются в пределах 0,8≤Кmid≤1,1 соответственно, которые для дополнительного улучшения качества функционирования радиопеленгатора могут быть уточнены в пределах (5÷10)% в зависимости от отношения высоты мачтового устройства к длине волны λ радиосигналов, от отношения
рекомендуемые средние значения Кmid диаграмм направленности антенн в составе решетки выбираются в пределах 0,8≤Кmid≤1,1 соответственно, которые для дополнительного улучшения качества функционирования радиопеленгатора могут быть уточнены в пределах (5÷10)% в зависимости от отношения высоты мачтового устройства к длине волны λ радиосигналов, от отношения  и от характеристик конкретных известных типовых схем согласующе-симметрирующих устройств, применяемых в антенной технике.
и от характеристик конкретных известных типовых схем согласующе-симметрирующих устройств, применяемых в антенной технике.
Функциональные схемы выполнения РПБ 2.1, 2.2 и 2.3, БИРФ 3.1, 3.2 и 3.3, БФРС 4.1, 4.2 и 4.3, ГУС 19 и ДПВ 18, взаимосвязи между вышеупомянутыми блоками и временные диаграммы их функционирования не отличаются от схем, взаимосвязей и временных диаграмм аналогичных блоков ближайшего аналога и других вышеупомянутых аналогов.
При этом на первом выходе ДПВ 18 формируется сигнал, соответствующий расстоянию b между антеннами 1.1, 1.2 и 1.3 эквидистантной трехэлементной КАР. На втором выходе ДПВ 18 в зависимости от частоты f, на которую настраиваются РПБ 2.1, 2.2 и 2.3, по команде, поступающей с выхода ГУС 19 на управляющий вход ДПВ 18, формируется сигнал, соответствующий длине волны  причем значения λ должны удовлетворять условию λ≤1,5b. На третьем выходе ДПВ 18 формируется сигнал, соответствующий вышеупомянутому рекомендуемому среднему значению Кmid. На четвертом выходе ДПВ 18 формируется сигнал, соответствующий минимальной амплитуде rmin, определяемой по формуле (49). При этом, с учетом (2) и (14), в зависимости от отношения b/λ, изменяющегося, например, в пределах
причем значения λ должны удовлетворять условию λ≤1,5b. На третьем выходе ДПВ 18 формируется сигнал, соответствующий вышеупомянутому рекомендуемому среднему значению Кmid. На четвертом выходе ДПВ 18 формируется сигнал, соответствующий минимальной амплитуде rmin, определяемой по формуле (49). При этом, с учетом (2) и (14), в зависимости от отношения b/λ, изменяющегося, например, в пределах  при случайной СКО σθr=1° значение qmin выбирается в пределах 40≤qmin≤10 соответственно, а при σθr=2° - в пределах 20≤qmin≤5 соответственно. Действующее значение напряжения внутреннего шума Ueff каналов формирования разностных сигналов, как отмечалось ранее, зависит от технической реализации РПБ 2.1, 2.2 и 2.3 и определяется с учетом известной формулы Найквиста для одного радиоприемного канала и с учетом увеличения в
при случайной СКО σθr=1° значение qmin выбирается в пределах 40≤qmin≤10 соответственно, а при σθr=2° - в пределах 20≤qmin≤5 соответственно. Действующее значение напряжения внутреннего шума Ueff каналов формирования разностных сигналов, как отмечалось ранее, зависит от технической реализации РПБ 2.1, 2.2 и 2.3 и определяется с учетом известной формулы Найквиста для одного радиоприемного канала и с учетом увеличения в  раз напряжения внутреннего шума из-за использования для формирования разностных сигналов двух радиоприемных каналов, шумы в которых некоррелированы, в соответствии с выражением:
раз напряжения внутреннего шума из-за использования для формирования разностных сигналов двух радиоприемных каналов, шумы в которых некоррелированы, в соответствии с выражением:

где k0=1,38·10-23 Вт/(Гц·К) - постоянная Больцмана;
Т0=288 К - стандартная абсолютная температура;
Nш - коэффициент шума РПБ 2.1,2.2 и 2.3;
Rвх - входное сопротивление РПБ 2.1, 2.2 и 2.3;
Δf - полоса элементарного частотного канала РПБ 2.1, 2.2 и 2.3.
Так, при типовых значениях радиоприемных устройств Nш=10,Rвх=50 Ом и Δf=2 кГц из (97) получаем:

С учетом вышеизложенного, например, при σθr=1° в зависимости от отношения , изменяющегося, в частности, в пределах  рекомендуемые значения rmin составляют:
рекомендуемые значения rmin составляют:

На пятом выходе ДПВ 18 формируется сигнал, соответствующий априорно известному значению максимально допустимой ошибки Δθmax определения азимута, рекомендуемое в соответствии с (93) значение которого составляет (2÷2,5)°.
Функциональная схема варианта реализации БФКН 5 (фиг.7) содержит три функциональных преобразователя (ФП) 20.1, 20.2 и 20.3 вида  пары входов которых являются соответственно первой (Вх.11 и Вх.12), второй (Вх.21 и Вх.22) и третьей (Вх.31 и Вх.32) парами входов БФКН 5, три элемента сравнения (ЭС) 21.1, 21.2 и 21.3, три умножителя 22.1, 22.2 и 22.3, три сумматора 23.1.23.2 и 23.3, три коммутатора 24.1, 24.2 и 24.3, шесть делителей 25.1. 25.2, 25.3, 25.4, 25.5 и 25.6, выходы которых являются соответственно первым (Вых.1), вторым (Вых.2), третьим (Вых.3), четвертым (Вых.4), пятым (Вых.5) и шестым (Вых.6) выходами БФКН 5, и датчик 26 числа 2. Причем выход ФП 20.1 подсоединен к объединенным первым входам коммутатора 24.3, ЭС 21.3, умножителя 22.1 и сумматора 23.3 и вторым входам коммутатора 24.2, ЭС 21.2 и сумматора 23.2. Выход ФП 20.2 подсоединен к объединенным первым входам коммутатора 24.1, ЭС 21.1, сумматора 23.1 и умножителя 22.2 и вторым входам коммутатора 24.3, ЭС 21.3 и сумматора 23.3. Выход ФП 20.3 подсоединен к объединенным первым входам коммутатора 24.2, ЭС 21.2, сумматора 23.2 и умножителя 22.3 и вторым входам коммутатора 24.1, ЭС 21.1 и сумматора 23.1. Выходы ЭС 21.1, 21.2 и 21.3 подсоединены к управляющим входам коммутаторов 24.1, 24.2 и 24.3 соответственно, пары выходов которых подсоединены соответственно к парам входов делителей 25.1, 25.2 и 25.3. Выход датчика 26 подсоединен к объединенным вторым входам умножителей 22.1, 22.2 и 22.3, выходы которых подсоединены к первым входам делителей 25.4, 25.5 и 25.6 соответственно, вторые входы которых подсоединены к выходам сумматоров 23.1, 23.2 и 23.3 соответственно. Необходимо отметить, что параметрами X1 и X2 обозначена пара сигналов, поступающих на соответствующую пару входов ФП 20.1, 20.2 и 20.3 вида
пары входов которых являются соответственно первой (Вх.11 и Вх.12), второй (Вх.21 и Вх.22) и третьей (Вх.31 и Вх.32) парами входов БФКН 5, три элемента сравнения (ЭС) 21.1, 21.2 и 21.3, три умножителя 22.1, 22.2 и 22.3, три сумматора 23.1.23.2 и 23.3, три коммутатора 24.1, 24.2 и 24.3, шесть делителей 25.1. 25.2, 25.3, 25.4, 25.5 и 25.6, выходы которых являются соответственно первым (Вых.1), вторым (Вых.2), третьим (Вых.3), четвертым (Вых.4), пятым (Вых.5) и шестым (Вых.6) выходами БФКН 5, и датчик 26 числа 2. Причем выход ФП 20.1 подсоединен к объединенным первым входам коммутатора 24.3, ЭС 21.3, умножителя 22.1 и сумматора 23.3 и вторым входам коммутатора 24.2, ЭС 21.2 и сумматора 23.2. Выход ФП 20.2 подсоединен к объединенным первым входам коммутатора 24.1, ЭС 21.1, сумматора 23.1 и умножителя 22.2 и вторым входам коммутатора 24.3, ЭС 21.3 и сумматора 23.3. Выход ФП 20.3 подсоединен к объединенным первым входам коммутатора 24.2, ЭС 21.2, сумматора 23.2 и умножителя 22.3 и вторым входам коммутатора 24.1, ЭС 21.1 и сумматора 23.1. Выходы ЭС 21.1, 21.2 и 21.3 подсоединены к управляющим входам коммутаторов 24.1, 24.2 и 24.3 соответственно, пары выходов которых подсоединены соответственно к парам входов делителей 25.1, 25.2 и 25.3. Выход датчика 26 подсоединен к объединенным вторым входам умножителей 22.1, 22.2 и 22.3, выходы которых подсоединены к первым входам делителей 25.4, 25.5 и 25.6 соответственно, вторые входы которых подсоединены к выходам сумматоров 23.1, 23.2 и 23.3 соответственно. Необходимо отметить, что параметрами X1 и X2 обозначена пара сигналов, поступающих на соответствующую пару входов ФП 20.1, 20.2 и 20.3 вида 
БФКН 5 работает следующим образом. Сигналы, соответствующие действительной  и мнимой
и мнимой  составляющим первого (i=1), второго (i=2) и третьего (i=3) сигналов
составляющим первого (i=1), второго (i=2) и третьего (i=3) сигналов 
 и
и  с пар входов Вх.11 и Вх.12, Вх.21 и Вх.22, Вх.31 и Вх.32 БФКН 5 поступают на пары входов ФП 20.1, 20.2 и 20.3 соответственно, где производится формирование сигналов, соответствующих их амплитудным значениям u1, u2 и u3 соответственно. Сигнал с выхода ФП 20.1 поступает на объединенные первые входы коммутатора 24.3, ЭС 21.3, умножителя 22.1, сумматора 23.3 и вторые входы коммутатора 24.2, ЭС 21.2 и сумматора 23.2. Сигнал с выхода ФП 20.2 поступает на объединенные первые входы коммутатора 24.1. ЭС 21.1, сумматора 23.1, умножителя 22.2 и вторые входы коммутатора 24.3, ЭС 21.3 и сумматора 23.3. Сигнал с выхода ФП 20.3 поступает на объединенные первые входы коммутатора 24.2, ЭС 21.2, сумматора 23.2, умножителя 22.3 и вторые входы коммутатора 24.1, ЭС 21.1 и сумматора 23.1. В ЭС 21.1, 21.2 и 21.3 производится сравнение амплитуд сигналов, поступивших на их пары входов, и в случаях, если амплитуды сигналов, поступивших на их первые входы, не меньше амплитуд сигналов, поступивших на их вторые входы, на выходах соответствующих ЭС формируются сигналы логических единиц, а в противном случае - сигналы логических нулей. Сигналы с выходов ЭС 21.1. 21.2 и 21.3 поступают на управляющие входы соответственно коммутаторов 24.1. 24.2 и 24.3, в каждом из которых производится соединение первого и второго входа соответственно с первым и вторым выходом в случае, если на его управляющий вход поступает сигнал логической единицы, или соединение первого и второго входа соответственно с вторым и первым выходом в случае, если на его управляющий вход поступает сигнал логического нуля. Сигналы, поступившие на пары входов коммутаторов 24.1, 24.2 и 24.3, с их пар выходов поступают на пары входов делителей 25.1, 25.2 и 25.3 соответственно, в каждом из которых производится формирование сигнала, равного отношению амплитуды сигнала, поступившего на первый вход, к амплитуде сигнала, поступившего на его второй вход. Кроме того, сигнал с выхода датчика 26 поступает на объединенные вторые входы умножителей 22.1. 22.2 и 22.3, в каждом из которых формируется сигнал, соответствующий произведению сигналов, поступивших на их пары входов. Сигналы с выходов умножителей 22.1, 22.2 и 22.3 поступают на первые входы делителей 25.4. 25.5 и 25.6. В сумматорах 23.1. 23.2 и 23.3 производится суммирование сигналов, поступивших на их пары входов и, далее, просуммированные сигналы с выходов сумматоров 23.1, 23.2 и 23.3 поступают на вторые входы соответственно делителей 25.4, 25.5 и 25.6, в каждом из которых производится формирование сигнала, равного отношению амплитуды сигнала, поступившего на первый вход, к амплитуде сигнала, поступившего на его второй вход. На выходах делителей 25.1, 25.2, 25.3, 25.4, 25.5 и 25.6, являющихся первым (Вых.1), вторым (Вых.2), третьим (Вых.3), четвертым (Вых.4), пятым (Вых.5) и шестым (Вых.6) выходами БФКН 5, формируются сигналы, соответствующие коэффициентам P1, P1, Р3, K1, K2 и К3 неравномерности диаграмм направленности антенн в составе решетки соответственно.
с пар входов Вх.11 и Вх.12, Вх.21 и Вх.22, Вх.31 и Вх.32 БФКН 5 поступают на пары входов ФП 20.1, 20.2 и 20.3 соответственно, где производится формирование сигналов, соответствующих их амплитудным значениям u1, u2 и u3 соответственно. Сигнал с выхода ФП 20.1 поступает на объединенные первые входы коммутатора 24.3, ЭС 21.3, умножителя 22.1, сумматора 23.3 и вторые входы коммутатора 24.2, ЭС 21.2 и сумматора 23.2. Сигнал с выхода ФП 20.2 поступает на объединенные первые входы коммутатора 24.1. ЭС 21.1, сумматора 23.1, умножителя 22.2 и вторые входы коммутатора 24.3, ЭС 21.3 и сумматора 23.3. Сигнал с выхода ФП 20.3 поступает на объединенные первые входы коммутатора 24.2, ЭС 21.2, сумматора 23.2, умножителя 22.3 и вторые входы коммутатора 24.1, ЭС 21.1 и сумматора 23.1. В ЭС 21.1, 21.2 и 21.3 производится сравнение амплитуд сигналов, поступивших на их пары входов, и в случаях, если амплитуды сигналов, поступивших на их первые входы, не меньше амплитуд сигналов, поступивших на их вторые входы, на выходах соответствующих ЭС формируются сигналы логических единиц, а в противном случае - сигналы логических нулей. Сигналы с выходов ЭС 21.1. 21.2 и 21.3 поступают на управляющие входы соответственно коммутаторов 24.1. 24.2 и 24.3, в каждом из которых производится соединение первого и второго входа соответственно с первым и вторым выходом в случае, если на его управляющий вход поступает сигнал логической единицы, или соединение первого и второго входа соответственно с вторым и первым выходом в случае, если на его управляющий вход поступает сигнал логического нуля. Сигналы, поступившие на пары входов коммутаторов 24.1, 24.2 и 24.3, с их пар выходов поступают на пары входов делителей 25.1, 25.2 и 25.3 соответственно, в каждом из которых производится формирование сигнала, равного отношению амплитуды сигнала, поступившего на первый вход, к амплитуде сигнала, поступившего на его второй вход. Кроме того, сигнал с выхода датчика 26 поступает на объединенные вторые входы умножителей 22.1. 22.2 и 22.3, в каждом из которых формируется сигнал, соответствующий произведению сигналов, поступивших на их пары входов. Сигналы с выходов умножителей 22.1, 22.2 и 22.3 поступают на первые входы делителей 25.4. 25.5 и 25.6. В сумматорах 23.1. 23.2 и 23.3 производится суммирование сигналов, поступивших на их пары входов и, далее, просуммированные сигналы с выходов сумматоров 23.1, 23.2 и 23.3 поступают на вторые входы соответственно делителей 25.4, 25.5 и 25.6, в каждом из которых производится формирование сигнала, равного отношению амплитуды сигнала, поступившего на первый вход, к амплитуде сигнала, поступившего на его второй вход. На выходах делителей 25.1, 25.2, 25.3, 25.4, 25.5 и 25.6, являющихся первым (Вых.1), вторым (Вых.2), третьим (Вых.3), четвертым (Вых.4), пятым (Вых.5) и шестым (Вых.6) выходами БФКН 5, формируются сигналы, соответствующие коэффициентам P1, P1, Р3, K1, K2 и К3 неравномерности диаграмм направленности антенн в составе решетки соответственно.
Функциональная схема варианта реализации компаратора 6 (фиг.8) содержит три умножителя 27.1, 27.2 и 27.3, первые и вторые входы которых являются соответственно первым (Вх.1) и четвертым (Вх.4), вторым (Вх.2) и пятым (Вх.5), третьим (Вх.3) и шестым (Вх.6) входами компаратора 6, три датчика 28, 29 и 30 чисел 1.2 и 3 соответственно, три элемента сравнения (ЭС) 31.1. 31.2 и 31.3, три коммутатора 32.1, 32.2 и 32.3, шесть элементов "И" (ЭИ) 33.1, 33.2, 33.3, 33.4, 33.5 и 33.6, причем объединенные выходы ЭИ 33.1, 33.2 и 33.3 и объединенные выходы ЭИ 33.4, 33.5 и 33.6 являются соответственно первым (Вых.1) и третьим (Вых.3) выходами компаратора 6, шесть элементов "НЕ" (ЭНЕ) 34.1, 34.2, 34.3, 34.4, 34.5 и 34.6 и три дополнительных элемента "И" (ЭИ) 35.1, 35.2 и 35.3, объединенные выходы которых являются вторым выходом (Вых.2) компаратора 6. Причем выходы умножителей 27.1. 27.2 и 27.3 подсоединены соответственно к объединенным первым входам ЭС 31.1 и 31.2, к объединенным второму входу ЭС 31.1 и первому входу ЭС 31.3 и к объединенным вторым входам ЭС 31.2 и ЭС 31.3. Выход датчика 28 подсоединен к объединенным первым входам коммутаторов 32.1 и 32.2 и ЭНЕ 34.1 и 34.2. Выход датчика 29 подсоединен к объединенным второму входу коммутатора 32.1 и первым входам коммутатора 32.3 и ЭНЕ 34.3 и 34.4. Выход датчика 30 подсоединен к объединенным первым входам ЭНЕ 34.5 и 34.6 и вторым входам коммутаторов 32.2 и 32.3. Выходы ЭС 31.1, 31.2 и 31.3 подсоединены к управляющим входам коммутаторов 32.1, 32.2 и 32.3 соответственно. Первый и второй выходы коммутатора 32.1 подсоединены соответственно к объединенным первым входам ЭИ 33.1 и 33.2 и к объединенным первым входам ЭИ 33.4 и 33.5. Первый и второй выходы коммутатора 32.2 подсоединены соответственно к объединенным второму входу ЭИ 33.1 и первому входу ЭИ 33.3 и к объединенным второму входу ЭИ 33.4 и первому входу ЭИ 33.6. Первый и второй выходы коммутатора 32.2 подсоединены соответственно к объединенным вторым входам ЭИ 33.2 и 33.3 и к объединенным вторым входам ЭИ 33.5 и 33.6. Кроме того, объединенные выходы ЭИ 33.4, 33.5 и 33.6 подсоединены к объединенным вторым входам ЭНЕ 34.2, 34.4 и 34.6. И, наконец, выходы ЭНЕ 34.1 и 34.2, 34.3 и 34.4, 34.5 и 34.6 подсоединены соответственно к парам входов ЭИ 35.1, 35.2 и 35.3.
Компаратор 6 работает следующим образом. Сигналы, соответствующие амплитудам r1, r2 и r3 разностных сигналов и коэффициентам P1, P2 и Р3 неравномерности диаграмм направленности антенн, в составе решетки с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5 и Вх.6 компаратора 6 поступают соответственно на первые входы умножителей 27.1, 27.2 и 27.3 и вторые входы умножителей 27.1. 27.2 и 27.3, в которых производится перемножение сигналов, поступивших на их пары входов. Сигналы с выходов умножителей 27.1. 27.2 и 27.3 поступают соответственно на объединенные первые входы ЭС 31.1 и 31.2, на объединенные второй вход ЭС 31.1 и первый вход ЭС 31.3 и на объединенные вторые входы ЭС 31.2 и ЭС 31.3. В каждом из ЭС 31.1, 31.2 и 31.3 формируется сигнал логической единицы в случае, если амплитуда сигнала, поступившего на его первый вход, не превышает амплитуду сигнала, поступившего на его второй вход, или сигнал логического нуля в противном случае. Сигналы с выходов ЭС 31.1, 31.2 и 31.3 поступают на управляющие входы коммутаторов 32.1. 32.2 и 32.3 соответственно. Сигнал, соответствующий числу 1, с выхода датчика 28 поступает на объединенные первые входы коммутаторов 32.1 и 32.2 и ЭНЕ 34.1 и 34.2. Сигнал, соответствующий числу 2, с выхода датчика 29 поступает на объединенные второй вход коммутатора 32.1 и первый входы коммутатора 32.3 и ЭНЕ 34.3 и 34.4. Сигнал, соответствующий числу 3, с выхода датчика 30 поступает на объединенные первые входы ЭНЕ 34.5 и 34.6 и вторые входы коммутаторов 32.2 и 32.3. В каждом из коммутаторов 32.1, 32.2 и 32.3 в случае поступления на его управляющий вход сигнала логической единицы производится подсоединение его первого и второго входа соответственно к первому и второму выходам. Далее сигналы с первого и второго выходов коммутатора 32.1 поступают соответственно на объединенные первые входы ЭИ 33.1 и 33.2 и на объединенные первые входы ЭИ 33.4 и 33.5, сигналы с первого и второго выходов коммутатора 32.2 поступают соответственно на объединенные второй вход ЭИ 33.1 и первый вход ЭИ 33.3 и на объединенные второй вход ЭИ 33.4 и первый вход ЭИ 33.6, а сигналы с первого и второго выходов коммутатора 32.3 поступают соответственно на объединенные вторые входы ЭИ 33.2 и 33.3 и на объединенные вторые входы ЭИ 33.5 и 33.6. В каждом из ЭИ 33.1, 33.2. 33.3, 33.4, 33.5 и 33.6 производится подсоединение одного из его входов (например, первого) к выходу в случае, если сигналы, поступившие на его входы, равны между собой, а в противном случае ни один из входов к его выходу не подсоединяется. Сигнал с выхода одного из трех ЭИ 33.1, 33.2 и 33.3, соответствующий выбранному значению ξ порядкового номера антенны, поступает на первый выход (Вых.1) компаратора 6 и одновременно на объединенные вторые входы ЭНЕ 34.1. 34.3 и 34.5. Сигнал с выхода одного из ЭИ 33.4. 33.5 или 33.6, соответствующий выбранному значению ν порядкового номера антенн, поступает на третий выход (Вых.3) компаратора 6 и одновременно на объединенные вторые входы ЭНЕ 34.2, 34.4 и 34.6. В каждом из ЭНЕ 34.1, 34.2, 34.3, 34.4, 34.5 и 34.6 производится подсоединение первого из его входов к выходу в случае, если сигналы, поступившие на его входы, не равны между собой, а в противном случае на выходе формируется сигнал, не соответствующий ни одному из номеров индексов антенн (например, сигнал, соответствующий нулю). Сигналы с выходов ЭНЕ 34.1, 34.2, 34.3. 34.4, 34.5 и 34.6 поступают соответственно на первые и вторые входы ЭИ 35.1, 35.2 и 35.3, принцип функционирования которых совпадает с принципом функционирования ЭИ 33.1, 33.2, 33.3, 33.4, 33.5, 33.6. Сигнал с выхода одного из трех ЭИ 35.1, 35.2 или 35.3, соответствующий выбранному значению γ порядкового номера антенн, поступает на второй выход (Вых.2) компаратора 6.
Функциональная схема варианта реализации ВКОП 7 (фиг.9) содержит коммутатор 36, управляющий вход, первый, второй и третий входы которого являются соответственно первым (Вх.1), вторым (Вх.2), третьим (Вх.3) и четвертым (Вх.4) входами ВКОП 7, и последовательно соединенные вычитатель 37 и функциональный преобразователь (ФП) 38 вида sgn(X), причем выход коммутатора 36 подсоединен к первому входу вычитателя 37, второй вход которого является пятым входом (Вх.5) ВКОП 7, а выход ФП 38 является выходом (Вых.) ВКОП 7.
ВКОП 7 работает следующим образом. Сигналы, соответствующие выбранному значению ξ индекса номера антенны, коэффициентам К1, К2 и K3 неравномерности диаграмм направленности антенн и среднему значению Кmid коэффициентов неравномерности диаграмм направленности антенн, с входов Вх.1, Вх.2, Вх.3, Вх.4 и Вх.5 ВКОП 7 поступают соответственно на управляющий, первый, второй и третий входы коммутатора 36 и второй вход вычитателя 37. В коммутаторе по сигналу, поступившему на его управляющий вход, производится подсоединение одного из входов, значение порядкового номера которого совпадает со значением ξ индекса номера антенны, к его выходу. Сигнал с выхода коммутатора 36 поступает на первый вход вычитателя 37, где производится определение разности между амплитудами сигналов, поступившими соответственно на его первый и второй входы. Сигнал с выхода вычитателя 37 поступает на вход ФП 38, где производится формирование сигнала, соответствующего +1, в случае, если сигнал, поступивший на вход ФП 38, не имеет отрицательного знака, или равного -1 в противном случае. Сигнал с выхода ФП 38, соответствующий значению коэффициента p однозначности пеленгования, поступает на выход (Вых.) ВКОП 7.
Функциональная схема варианта реализации ВШПК 9 (фиг.10) содержит коммутатор 39, принцип функционирования которого совпадает с принципом функционирования коммутатора 36, а первый, второй, третий и управляющий входы являются соответственно первым (Вх.1), вторым (Вх.2), третьим (Вх.3) и четвертым (Вх.4) входами ВШПК 9, и последовательно соединенные вычитатель 40 и формирователь управляющего сигнала (ФУС) 41, причем выход коммутатора 39 подсоединен к первому входу вычитателя 40, второй вход которого является пятым входом (Вх.5) ВШПК 9, а выход ФУС 41 является выходом (Вых.) ВШПК 9.
ВШПК 9 работает следующим образом. Сигналы, соответствующие амплитудам r1, r2 и r3 разностных сигналов, выбранному значению ξ индекса номера антенны и минимальной амплитуде rmin разностных сигналов, с входов Вх.1, Вх.2, Вх.3, Вх.4 и Вх.5 ВШПК 9 поступают соответственно на первый, второй, третий и управляющий входы коммутатора 39 и второй вход вычитателя 40. В коммутаторе по сигналу, поступившему на его управляющий вход, производится подсоединение одного из входов, значение порядкового номера которого совпадает со значением ξ индекса номера антенны, к его выходу. Сигнал с выхода коммутатора 39 поступает на первый вход вычитателя 40, где производится определение разности между амплитудами сигналов, поступившими соответственно на его первый и второй входы. Сигнал с выхода вычитателя 40 поступает на вход ФУС 41, где производится формирование сигнала, соответствующего логической единице, в случае, если сигнал, поступивший на вход ФУС 41, не имеет отрицательного знака, или сигнала, соответствующего логическому нулю, в противном случае. Сигнал с выхода ФУС 41, соответствующий логическим единице или нулю, поступает на выход (Вых.) ВШПК 9.
Функциональная схема варианта реализации БОРФ 10 (фиг.11) содержит три ФП 42.1, 42.2 и 42.3 вида sgn(X), шесть умножителей 43.1, 43.2, 43.3, 43.4, 43.5 и 43.6 и три вычислителя разности фаз (ВРФ) 44.1, 44.2 и 44.3, выходы которых являются соответственно первым (Вых.1), вторым (Вых.2) и третьим (Вых.3) выходами БОРФ 10, а первые входы умножителей 43.1, 43.2, 43.3, 43.4, 43.5 и 43.6 и входы ФП 42.1, 42.2 и 42.3 являются соответственно первым (Вх.1), вторым (Вх.2), третьим (Вх.3), четвертым (Вх.4), пятым (Вх.5), шестым (Вх.6), седьмым (Вх.7), восьмым (Вх.8) и девятым (Вх.9) входами БОРФ 10. Причем выходы ФП 42.1, 42.2 и 42.3 подсоединены соответственно к объединенным вторым входам умножителей 43.1 и 43.2, к объединенным вторым входам умножителей 43.3 и 43.4 и к объединенным вторым входам умножителей 43.5 и 43.6. Выход умножителя 43.1 подсоединен к объединенным первым входам второй пары входов ВРФ 44.2 и первой пары входов ВРФ 44.3. Выход умножителя 43.2 подсоединен к объединенным вторым входам второй пары входов ВРФ 44.2 и первой пары входов ВРФ 44.3. Выход умножителя 43.3 подсоединен к объединенным первым входам первой пары входов ВРФ 44.1 и второй пары входов ВРФ 44.3. Выход умножителя 43.4 подсоединен к объединенным вторым входам первой пары входов ВРФ 44.1 и второй пары входов ВРФ 44.3. Выход умножителя 43.5 подсоединен к объединенным первым входам второй пары входов ВРФ 44.1 и первой пары входов ВРФ 44.2. Выход умножителя 43.6 подсоединен к объединенным вторым входам второй пары входов ВРФ 44.1 и первой пары входов ВРФ 44.2.
БОРФ 10 работает следующим образом. Сигналы, соответствующие действительной  и мнимой
и мнимой  составляющим первого (i=1), второго (i=2) и третьего (i=1) разностных сигналов
составляющим первого (i=1), второго (i=2) и третьего (i=1) разностных сигналов  с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5 и Вх.6 БОРФ 10 поступают на первые входы умножителей 43.1, 43.2, 43.3, 43.4, 43.5 и 43.6 соответственно, а сигналы, соответствующие однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, с входов Вх.7, Вх.3 и Вх.9 БОРФ 10 поступают соответственно на входы ФП 42.1, 42.2 и 42.3. В каждом из ФП 42.1, 42.2 и 42.3 производится формирование сигнала, соответствующего +1 в случае, если знак сигнала на его входе не отрицательный, или формирование сигнала, соответствующего -1 в противном случае. Сигналы с выходов ФП 42.1, 42.2 и 42.3 поступают соответственно на объединенные вторые входы умножителей 43.3 и 43.3 и на объединенные вторые входы умножителей 43.5 и 43.6. В каждом умножителе 43.1, 43.2, 43.3, 43.4, 43.5 и 43.6 производится перемножение сигналов, поступивших на их пары входов. Сигнал с выхода умножителя 43.1 поступает на объединенные первые входы второй пары входов ВРФ 44.2 и первой пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.2 поступает на объединенные вторые входы второй пары входов ВРФ 44.2 и первой пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.3 поступает на объединенные первые входы первой пары входов ВРФ 44.1 и второй пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.4 поступает на объединенные вторые входы первой пары входов ВРФ 44.1 и второй пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.5 поступает на объединенные первые входы второй пары входов ВРФ 44.1 и первой пары входов ВРФ 44.2. И, наконец, сигнал с выхода умножителя 43.6 поступает на объединенные вторые входы второй пары входов ВРФ 44.1 и первой пары входов ВРФ 44.2. В каждом из ВРФ 44.1, 44.2 и 44.3 производится определение разности фаз между сигналом, действительная и мнимая составляющие которого поступают соответственно на первый и второй входы первой пары входов, и сигналом, действительная и мнимая составляющие которого поступают соответственно на первый и второй входы второй пары входов. Сигналы с выходов ВРФ 44.1, 44.2 и 44.3, соответствующие разностям фаз ϕR1, ϕR2 и ϕR3 между разностными сигналами, поступают соответственно на первый (Вых.1), второй (Вых.2) и третий (Вых.3) БОРФ 10.
с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5 и Вх.6 БОРФ 10 поступают на первые входы умножителей 43.1, 43.2, 43.3, 43.4, 43.5 и 43.6 соответственно, а сигналы, соответствующие однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, с входов Вх.7, Вх.3 и Вх.9 БОРФ 10 поступают соответственно на входы ФП 42.1, 42.2 и 42.3. В каждом из ФП 42.1, 42.2 и 42.3 производится формирование сигнала, соответствующего +1 в случае, если знак сигнала на его входе не отрицательный, или формирование сигнала, соответствующего -1 в противном случае. Сигналы с выходов ФП 42.1, 42.2 и 42.3 поступают соответственно на объединенные вторые входы умножителей 43.3 и 43.3 и на объединенные вторые входы умножителей 43.5 и 43.6. В каждом умножителе 43.1, 43.2, 43.3, 43.4, 43.5 и 43.6 производится перемножение сигналов, поступивших на их пары входов. Сигнал с выхода умножителя 43.1 поступает на объединенные первые входы второй пары входов ВРФ 44.2 и первой пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.2 поступает на объединенные вторые входы второй пары входов ВРФ 44.2 и первой пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.3 поступает на объединенные первые входы первой пары входов ВРФ 44.1 и второй пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.4 поступает на объединенные вторые входы первой пары входов ВРФ 44.1 и второй пары входов ВРФ 44.3. Сигнал с выхода умножителя 43.5 поступает на объединенные первые входы второй пары входов ВРФ 44.1 и первой пары входов ВРФ 44.2. И, наконец, сигнал с выхода умножителя 43.6 поступает на объединенные вторые входы второй пары входов ВРФ 44.1 и первой пары входов ВРФ 44.2. В каждом из ВРФ 44.1, 44.2 и 44.3 производится определение разности фаз между сигналом, действительная и мнимая составляющие которого поступают соответственно на первый и второй входы первой пары входов, и сигналом, действительная и мнимая составляющие которого поступают соответственно на первый и второй входы второй пары входов. Сигналы с выходов ВРФ 44.1, 44.2 и 44.3, соответствующие разностям фаз ϕR1, ϕR2 и ϕR3 между разностными сигналами, поступают соответственно на первый (Вых.1), второй (Вых.2) и третий (Вых.3) БОРФ 10.
Функциональная схема варианта реализации ВРФ 44.1, 44.2 и 44.3 (фиг.12), входящих в состав БОРФ 10, и которые могут использоваться в качестве БИРФ 3.1, 3.2 и 3.3, содержит четыре умножителя 45.1, 45.2, 45.3 и 45.4, вычитатель 46, сумматор 47 и ФП 48 вида  , причем объединенные первые входы умножителей 45.2 и 45.3 и объединенные первые входы умножителей 45.1 и 45.4 являются соответственно первым (Вх.11) и вторым (Вх.12) входами первой пары входов ВРФ 44.1, 44.2 и 44.3, объединенные вторые входы умножителей 45.1 и 45.3 и объединенные вторые входы умножителей 45.2 и 45.4 являются соответственно первым (Вх.21) и вторым (Вх.22) входами второй пары входов ВРФ 44.1, 44.2 и 44.3, а выход ФП 48 является выходом (Вых.) ВРФ 44.1, 44.2 и 44.3. Кроме того, выходы умножителей 45.1 и 45.2 подсоединены соответственно к первому и второму входу вычитателя 46, выход которого подсоединен к первому входу ФП 48, а выходы умножителей 45.3 и 45.4 подсоединены соответственно к первому и второму входам сумматора 47, выход которого подсоединен ко второму входу ФП 48. При поступлении действительной и мнимой составляющих первого сигнала соответственно на Вх.11 и Вх.12 ВРФ 44.1, 44.2 и 44.3 и поступлении действительной и мнимой составляющих второго сигнала соответственно на Вх.21 и Вх.2 ВРФ 44.1, 44.2 и 44.3 на выходе (Вых.) ВРФ 44.1, 44.2 и 44.3 формируется сигнал, соответствующий разности фаз между вышеупомянутой парой первого и второго сигналов. Необходимо отметить, что параметрами Х1 и Х2 обозначена пара сигналов, поступающих соответственно на первый и второй входы ФП 48, вида
, причем объединенные первые входы умножителей 45.2 и 45.3 и объединенные первые входы умножителей 45.1 и 45.4 являются соответственно первым (Вх.11) и вторым (Вх.12) входами первой пары входов ВРФ 44.1, 44.2 и 44.3, объединенные вторые входы умножителей 45.1 и 45.3 и объединенные вторые входы умножителей 45.2 и 45.4 являются соответственно первым (Вх.21) и вторым (Вх.22) входами второй пары входов ВРФ 44.1, 44.2 и 44.3, а выход ФП 48 является выходом (Вых.) ВРФ 44.1, 44.2 и 44.3. Кроме того, выходы умножителей 45.1 и 45.2 подсоединены соответственно к первому и второму входу вычитателя 46, выход которого подсоединен к первому входу ФП 48, а выходы умножителей 45.3 и 45.4 подсоединены соответственно к первому и второму входам сумматора 47, выход которого подсоединен ко второму входу ФП 48. При поступлении действительной и мнимой составляющих первого сигнала соответственно на Вх.11 и Вх.12 ВРФ 44.1, 44.2 и 44.3 и поступлении действительной и мнимой составляющих второго сигнала соответственно на Вх.21 и Вх.2 ВРФ 44.1, 44.2 и 44.3 на выходе (Вых.) ВРФ 44.1, 44.2 и 44.3 формируется сигнал, соответствующий разности фаз между вышеупомянутой парой первого и второго сигналов. Необходимо отметить, что параметрами Х1 и Х2 обозначена пара сигналов, поступающих соответственно на первый и второй входы ФП 48, вида 
Функциональная схема варианта реализации БФОА 8 (фиг.13) содержит входной коммутатор 49, первый, второй, третий, четвертый, пятый и шестой входы которого являются соответственно первым (Вх.1), вторым (Вх.2), третьим (Вх.3), четвертым (Вх.4), пятым (Вх.5) и шестым (Вх.6) входами БФОА 8, низкочастотный вычислитель однозначных амплитуд разностных сигналов (НВОА) 50, высокочастотный вычислитель однозначных амплитуд разностных сигналов (ВВОА) 51, выходной коммутатор 52, вычислитель параметра цикличности номеров антенн (ВПЦН) 53, первый и второй входы которого являются соответственно седьмым (Вх.7) и восьмым (Вх.8) входами БФОА 8, делитель 54, первый и второй входы которого являются соответственно одиннадцатым (Вх.11) и двенадцатым (Вх.12) входами БФОА 8, последовательно соединенные вычитатель 55 и формирователь управляющих сигналов (ФУС) 56, и, наконец, датчик 57 числа 0,3. При этом первые, вторые, третьи, четвертые, пятые и шестые выходы первой и второй группы выходов коммутатора 49 подсоединены соответственно к первым, вторым, третьим, четвертым, пятым и шестым входам НВОА 50 и ВВОА 51, первые, вторые и третьи выходы которых подсоединены соответственно к первым, вторым и третьим входам первой и второй группы входов выходного коммутатора 52, первый, второй и третьи выходы которого являются соответственно первым (Вых.1), вторым (Вых.2) и третьим (Вых.3) выходами БФОА 8. Кроме того, седьмой и восьмой входы ВВОА 51 объединены соответственно с первым и вторым входами ВПЦН 53, объединенные седьмой вход НВОА 50 и девятый вход ВВОА 51 являются девятым (Вх.9) входом БФОА 8, десятый вход ВВОА 51 является десятым (Вх.10) входом БФОА 8. Выход ВПЦН 53 подсоединен к одиннадцатому входу ВВОА 51. И наконец, выход делителя 54 совместно с выходом датчика 57 подсоединены соответственно к первому и второму входам вычитателя 55, а выход ФУС 56 подсоединен к объединенным управляющим входам коммутаторов 49 и 52.
БФОА 8 работает следующим образом. Сигналы, соответствующие разностям фаз ϕ1, ϕ2 и ϕ3 между сигналами, принятыми соответствующими парами антенн, амплитудам r1, r2 и r3 разностных сигналов, выбранным значениям ξ, γ и ν индексов номеров антенн, значению коэффициента р однозначности пеленгования и значениям расстояния b между антеннами и длины волны λ радиосигнала, с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5, Вх.6, Вх.7, Вх.8, Вх.9, Вх.10, Вх.11 и Вх.12 БФОА 8 поступают соответственно на первый, второй, третий, четвертый, пятый и шестой входы коммутатора 49, на объединенные первый вход ВПЦН 53 и седьмой вход ВВОА 51, на объединенные второй вход ВПЦН 53 и восьмой вход ВВОА 51, на объединенные девятый вход ВВОА 51 и седьмой вход НВОА 50, десятый вход ВВОА 51 и первый и второй входы делителя 54. В делителе 54 производится определение отношения амплитуды сигнала, поступившего на его первый вход к амплитуде сигнала, поступившего на его второй вход. Сигнал с выхода делителя 54 совместно с сигналом с выхода датчика 57 поступают соответственно на первый и второй входы вычитателя 55, где производится определение разности между амплитудой сигнала, поступившего на его первый вход, и амплитудой сигнала, поступившего на его второй вход. Сигнал с выхода вычитателя 55 поступает на вход ФУС 56, на выходе которого формируется сигнал логической единицы в случае, если сигнал, поступивший на его вход, не равен нулю, и имеет положительный знак или сигнал логического нуля в противном случае. Сигнал с выхода ФУС 56 поступает на объединенные управляющие входы коммутаторов 49 и 52. В ВПЦН 53 по значениям ξ и γ выбранных номеров антенн по правилу (45) производится формирование параметра l, принимающего одно из двух значений +1 или -1, и сигнал, соответствующий одному из вышеупомянутых сформированных значений параметра l, с выхода ВПЦН 53 поступает на одиннадцатый вход ВВОА 51. В случае поступления на объединенные управляющие входы коммутаторов 49 и 52 сигналов логического нуля шесть входов коммутатора 49 подсоединяются к соответствующим шести выходам его первой группы выходов, а три входа первой группы входов коммутатора 52 подсоединяются соответственно его трем выходам. При этом сигналы с шести входов коммутатора 49 поступают соответственно на шесть выходов его первой группы выходов и, далее, поступают соответственно на первые шесть входов НВОА 50, где с учетом значения ν индекса номера антенны, поступившего на его седьмой вход, по правилу (42) производится формирование трех однозначных амплитудных значений R1, R2 и R3 разностных сигналов. Сигналы, соответствующие трем однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, с трех выходов НВОА 50 поступают соответственно на три входа первой группы входов коммутатора 52, соединенных с тремя его выходами, и далее с трех выходов коммутатора 52 поступают соответственно на первый (Вых.1), второй (Вых.2) и третий (Вых.3) выходы БФОА 8. В случае поступления на объединенные управляющие входы коммутаторов 49 и 52 сигналов логической единицы шесть входов коммутатора 49 подсоединяются к соответствующим шести выходами его второй группы выходов, а три входа второй группы входов коммутатора 52 подсоединяются соответственно к его трем выходам. При этом сигналы с шести входов коммутатора 49 поступают соответственно на шесть выходов его второй группы выходов и далее поступает соответственно на первые шесть входов ВВОА 51, где с учетом значений ξ, γ и ν индексов номеров антенн, значения коэффициента р однозначности пеленгования и значения параметра l цикличности номеров антенн, поступивших на его седьмой, восьмой, девятый, десятый и одиннадцатый входы соответственно, по правилу (44) производится формирование трех однозначных амплитудных значений R1, R2 и R3 разностных сигналов. Сигналы, соответствующие трем значениям R1, R2 и R3, с трех выходов ВВОА 51 поступают соответственно на три входа второй группы входов коммутатора 52, соединенных с тремя его выходами, и далее с трех выходов коммутатора 52 поступают соответственно на выходы Вых.1, Вых.2 и Вых.3 БФОА 8.
Функциональная схема варианта реализации НВОА 50 (фиг.14), входящего в состав БФОА 8, содержит три сумматора 58.1, 58.2 и 58.3, три инвертора 59.1, 59.2 и 59.3, датчики 60, 61 и 62 чисел 1, 2 и 3 соответственно, три элемента "И" (ЭИ) 63.1, 63.2 и 63.3, три коммутатора 64.1, 64.2 и 64.3, три ФП 65.1, 65.2 и 65.3 вида sgn(X) и три умножителя 66.1, 66.2 и 66.3, выходы которых являются первым (Вых.1), вторым (Вых.2) и третьим (Вых.3) выходами НВОА 50. Причем объединенные первые входы сумматоров 58.2 и 58.3 и коммутатора 64.1 являются первым входом (Вх.1) НВОА 50, объединенные второй вход сумматора 58.3 и первые входы сумматора 58.1 и коммутатора 64.2 являются вторым входом (Вх.2) НВОА 50, объединенные первый вход коммутатора 64.3 и вторые входы сумматоров 58.1 и 58.2 являются третьим входом (Вх.3) НВОА 50, вторые входы умножителей 66.1, 66.2 и 66.3 являются соответственно четвертым (Вх.4), пятым (Вх.5) и шестым (Вх.6) входами НВОА 50, а объединенные вторые входы ЭИ 63.1, 63.2 и 63.3 являются седьмым входом (Вх.7) НВОА 50. Кроме того, выходы сумматоров 58.1, 58.2 и 58.3 подсоединены соответственно к входам инверторов 59.1, 59.2 и 59.3, выходы которых подсоединены к вторым входам коммутаторов 64.1, 64.2 и 64.3 соответственно. Выходы датчиков 60, 61 и 62 подсоединены к первым входам ЭИ 63.1, 63.2 и 63.3 соответственно, выходы которых подсоединены к управляющим входам коммутаторов 64.1, 64.2 и 64.3 соответственно. И наконец, выходы коммутаторов 64.1, 64.2 и 64.3 подсоединены к входам ФП 65.1, 65.2 и 65.3 соответственно, выходы которых подсоединены к первым входам умножителей 66.1, 66.2 и 66.3 соответственно.
НВОА 50 работает следующим образом. Сигналы, соответствующие разностям фаз ϕ1, ϕ2 и ϕ3, амплитудам r1, r2 и r3 разностных сигналов и выбранному значению ν номера антенны, с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5, Вх.6 и Вх.7 НВОА 50 поступают соответственно на объединенные первые входы сумматоров 58.2 и 58.3 и коммутатора 64.1, на объединенные второй вход сумматора 58.3 и первые входы сумматора 58.1 и коммутатора 64.2, на объединенные первый вход коммутатора 64.3 и вторые входы сумматоров 58.1 и 58.2, на вторые входы умножителей 66.1, 66.2 и 66.3 и на объединенные вторые входы ЭИ 63.1, 63.2 и 63.3. Просуммированные в каждом из сумматоров 58.1, 58.2 и 58.3 сигналы с их выходов поступают соответственно на входы инверторов 59.1, 59.2 и 59.3, где производится изменение их знаков на противоположный, и далее с выходов инверторов 59.1, 59.2 и 59.3 сигналы поступают на вторые входы коммутаторов 64.1, 64.2 и 64.3 соответственно. Сигналы с выходов датчиков 60, 61 и 62 поступают на первые входы ЭИ 63.1, 63.2 и 63.3 соответственно. В каждом из ЭИ 63.1, 63.2 или 63.3 формируется сигнал логической единицы в случае, если сигналы, поступившие на его пару входов, совпадают, или сигнал логического нуля в противном случае. Сигналы логической единицы или нуля с выходов ЭИ 63.1, 63.2 и 63.3 поступают на управляющие входы коммутаторов 64.1, 64.2 и 64.3 соответственно. В каждом из коммутаторов 64.1, 64.2 и 64.3 по команде, поступающей на его управляющий вход в виде сигнала логического нуля, производится подсоединение его первого входа к выходу, а по команде, поступающей на его управляющий вход в виде логической единицы, производится подсоединение его второго входа к выходу. Сигналы с соответствующих входов коммутаторов 64.1, 64.2 и 64.3 поступают на их выходы и далее - на входы ФП 65.1, 65.2 и 65.3 соответственно. Сигналы, соответствующие единичным функциям знака, с выходов ФП 65.1, 65.2 и 65.3 поступают на первые входы умножителей 66.1, 66.2 и 66.3. Попарно перемноженные в каждом из умножителей 66.1, 66.2 и 66.3 сигналы, соответствующие трем однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, с выходов умножителей 66.1, 66.2 и 66.3 поступают соответственно на выходы Вых.1, Вых.2 и Вых.3 НВОА 50.
Функциональная схема варианта реализации ВВОА 51 (фиг.15), входящего в состав БФОА 8, содержит четыре входных коммутатора 67.1, 67.2, 67.3 и 67.4, четыре умножителя 68.1, 68.2, 68.3 и 68.4, два ФП 69.1 и 69.2 вида sgn(X), инвертор 70 и три выходных коммутатора 71.1, 71.2 и 71.3, причем первый, второй и третий входы коммутатора 67.1 являются соответственно первым (Вх.1), вторым (Вх.2) и третьим (Вх.3) входами ВВОА 51, объединенные первые, объединенные вторые и объединенные третьи входы коммутаторов 67.2, 67.3 и 67.4 являются соответственно четвертым (Вх.4), пятым (Вх.5) и шестым (Вх.6) входами ВВОА 51, объединенные управляющие входы коммутаторов 67.1, 67.2 и 71.1 являются седьмым (Вх.7) входом ВВОА 51, объединенные управляющие входы коммутаторов 67.3 и 71.2 являются восьмым (Вх.8) входом ВВОА 51, объединенные управляющие входы коммутаторов 67.4 и 71.3 являются девятым (Вх.9) входом ВВОА 51, первый и второй входы умножителя 68.1 являются соответственно десятым (Вх.10) и одиннадцатым (Вх.11) входами ВВОА 51, а объединенные первые, объединенные вторые и объединенные третьи выходы коммутаторов 71.1, 71.2 и 71.3 являются соответственно первым (Вых.1), вторым (Вых.2) и третьим (Вых.3) выходами ВВОА 51. Кроме того, выход коммутатора 67.1 подсоединен к входу ФП 69.1, выход которого подсоединен к первому входу умножителя 68.2, второй вход и выход которого подсоединен соответственно к выходу коммутатора 67.2 и входу коммутатора 71.1. Выход коммутатора 67.3 подсоединен к первому входу умножителя 68.3, второй вход и выход которого подсоединены соответственно к выходу умножителя 68.1 и к объединенным входам ФП 69.2 и коммутатора 71.2, а выход ФП 69.2 подсоединен к первому входу умножителя 68.4. И наконец, выход коммутатора 67.4 подсоединен к входу инвертора 70, выход которого подсоединен к второму входу умножителя 68.4, выход которого подсоединен к входу коммутатора 71.3.
ВВОА 51 работает следующим образом. Сигналы, соответствующие разностям фаз ϕ1, ϕ2 и ϕ3, амплитудам r1, r2 и r3 разностных сигналов, выбранным значениям ξ, γ и ν номеров антенн, значению коэффициента р однозначности пеленгования и значению параметра l цикличности номеров антенн, с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5, Вх.6, Вх.7, Вх.8, Вх.9, Вх.10 и Вх.11 ВВОА 51 поступают соответственно на первый, второй и третий входы коммутатора 67.1, а объединенные первые, объединенные вторые и объединенные третьи входы коммутаторов 67.2, 67.3 и 67.4 - на объединенные управляющие входы коммутаторов 67.1, 67.2 и 71.1, на объединенные управляющие входы коммутаторов 67.3 и 71.2, на объединенные управляющие входы коммутаторов 67.4 и 71.3 и на первый и второй входы умножителя 68.1. Перемноженные в умножителе 68.1 сигналы с его выхода поступают на второй вход умножителя 68.3. В каждом из коммутаторов 67.1, 67.2, 67.3 и 67.4 по сигналу, поступающему на его управляющий вход, производится подсоединение к его выходу одного из его входов, порядковый номер которого совпадает со значением номера антенны соответствующего управляющего сигнала. Аналогичным образом в каждом из коммутаторов 71.1, 71.2 и 71.3 по сигналу, поступающему на его управляющий вход, производится подсоединение к его входу одного из его выходов, порядковый номер которого совпадает со значением номера антенны соответствующего управляющего сигнала. Сигналы с вышеупомянутых соответствующим управляющим сигналам входов коммутаторов 67.1, 67.2, 67.3 и 67.4 поступают на их выходы и далее с их выходов соответственно на вход ФП 69.1, второй вход умножителя 68.2, первый вход умножителя 68.3 и вход инвертора 70. Сигнал с выхода ФП 69.1 поступает на первый вход умножителя 68.2, где производится перемножение пары сигналов, поступивших на его пару входов. Далее сигнал с выхода умножителя 68.2 поступает на вход коммутатора 71.1. После перемножения сигналов, поступивших на пару входов умножителя 68.3, сигнал с его выхода поступает на объединенные входы коммутатора 71.2 и ФП 69.2. После преобразования сигнала в ФП 69.2 сигнал с его выхода поступает на первый вход умножителя 68.4. После преобразования сигнала в инверторе 70 сформированный на его выходе сигнал поступает на второй вход умножителя 68.4, где производится перемножение сигналов, поступивших на его пару входов, и после чего сформированный сигнал с выхода умножителя 68.4 поступает на вход коммутатора 71.3. Сигналы, соответствующие трем однозначным амплитудным значениям Rξ, Rγ и Rν разностных сигналов с входов соответственно коммутаторов 71.1, 71.2 и 71.3 поступают на соответствующие каждому из коммутаторов 71.1, 71.2 и 71.3 одному из выходов, в результате чего упорядоченная совокупность трех сигналов, соответствующих трем однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, поступает соответственно на первый (Вых.1), второй (Вых.2) и третий (Вых.3) выходы ВВОА 51.
Функциональная схема варианта реализации ВПЦН 53 (фиг.16), входящего в состав БФОА 8, содержит элемент "И" (ЭИ) 72, элемент сравнения (ЭС) 73, вычитатель 74, умножитель 75, сумматор 76 и датчики 77 и 78 чисел 1 и 3 соответственно, причем выход датчика 77 подсоединен к объединенным первому входу ЭИ 72 и второму входу вычитателя 74, объединенные второй вход ЭИ 72 и первый вход вычитателя 74 являются первым входом (Вх.1) ВПЦН 53, выходы ЭИ 72 и датчика 78 подсоединены соответственно к паре входов умножителя 75, выходы вычитателя 74 и умножителя 75 подсоединены соответственно к паре входов сумматора 76, выход которого подсоединен к первому входу ЭС 73, а второй вход и выход ЭС 73 являются соответственно вторым входом (Вх.2) и выходом (Вых.) ВПЦН 53.
ВПЦН 53 работает следующим образом. Сигналы, соответствующие выбранным значениям ξ и γ номеров антенн, с входов Вх.1 и Вх.2 ВПЦН 53 поступают соответственно на объединенные второй вход ЭИ и первый вход вычитателя 74 и на второй вход ЭС 73. Сигнал, соответствующий числу 1, с выхода датчика 77 поступает на объединенные первый вход ЭИ 72 и второй вход вычитателя 74. При совпадении сигналов, поступивших на пару входов ЭИ 72, на его выходе формируется сигнал, соответствующий 1, а в противном случае - сигнал, соответствующий 0. Пара сигналов с выходов ЭИ 72 и датчика 78 поступает на пару входов умножителя 75, где производится их перемножение. На выходе вычитателя 74 формируется сигнал, соответствующий разности между сигналами, поступившими на его первый и второй входы. Пара сигналов с выходов вычитателя 74 и умножителя 75 поступает соответственно на пару входов сумматора 76, где они суммируются, и суммарный сигнал с выхода сумматора 76 поступает на первый вход ЭС 73. В случае равенства сигналов, поступивших на пару входов ЭС 73, на его выходе формируется сигнал, соответствующий значению +1, а в противном случае - сигнал, соответствующий значению -1. Сигнал, соответствующий значению параметра l цикличности номеров антенн, с выхода ЭС 73 поступает на выход (Вых.) ВПЦН 53.
Функциональная схема варианта реализации АВА 11 (фиг.17) содержит два умножу жителя 79.1 и 79.2, три вычитателя 80.1, 80.2 и 80.3, ФП 81 вида  , выход которого является выходом (Вых.) АВА 11, и датчики 82 и 83 чисел 2 и
, выход которого является выходом (Вых.) АВА 11, и датчики 82 и 83 чисел 2 и  соответственно, причем выход датчика 82 подсоединен к первому входу умножителя 79.1, второй вход которого является первым входом (Вх.1) АВА 11, а выход подсоединен к первому входу вычитателя 80.1, второй вход которого, объединенный с вторым входом вычитателя 80.3, являются вторым входом (Вх.2) АВА 11, а выход подсоединен к первому входу вычитателя 80.2. Объединенные второй вход вычитателя 80.2 и первый вход вычитателя 80.3 являются третьим входом (Вх.3) АВА 11, а выход вычитателя 80.2 подсоединен к первому входу ФП 81. И наконец, выходы датчика 83 и вычитателя 80.3 подсоединены соответственно к паре входов умножителя 79.2, выход которого подсоединен к второму входу ФП 81.
соответственно, причем выход датчика 82 подсоединен к первому входу умножителя 79.1, второй вход которого является первым входом (Вх.1) АВА 11, а выход подсоединен к первому входу вычитателя 80.1, второй вход которого, объединенный с вторым входом вычитателя 80.3, являются вторым входом (Вх.2) АВА 11, а выход подсоединен к первому входу вычитателя 80.2. Объединенные второй вход вычитателя 80.2 и первый вход вычитателя 80.3 являются третьим входом (Вх.3) АВА 11, а выход вычитателя 80.2 подсоединен к первому входу ФП 81. И наконец, выходы датчика 83 и вычитателя 80.3 подсоединены соответственно к паре входов умножителя 79.2, выход которого подсоединен к второму входу ФП 81.
АВА 11 работает следующим образом. Сигналы, соответствующие однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, с входов Вх.1, Вх.2 и Вх.3 АВА 11 поступают соответственно на второй вход умножителя 79.1, на объединенные вторые входы вычитателей 80.1 и 80.3 и на объединенные первый вход вычитателя 80.3 и второй вход вычитателя 80.2. Сигнал с выхода датчика 82 поступает на первый вход умножителя 79.1, в котором производится перемножение сигналов, поступивших на его пару входов. Сигнал с выхода умножителя 79.1 поступает на первый вход вычитателя 80.1, где из него вычитается сигнал, поступивший на его второй вход. Сигнал с выхода вычитателя 80.1 поступает на первый вход вычитателя 80.2, где из него вычитается сигнал, поступивший на его второй вход. Далее сигнал с выхода вычитателя 80.2 поступает на первый вход ФП 81. В вычитателе 80.3 производится вычитание сигнала, поступившего на его второй вход, из сигнала, поступившего на его первый вход. Сигнал с выхода датчика 83 совместно с сигналом с выхода вычитателя 80.3 поступают соответственно на пару умножителей 79.2, где производится их перемножение. И, наконец, сигнал с выхода умножителя 79.2 поступает на второй вход ФП 81. В ФП 81 производится вычисление азимута θR источника радиосигнала, и сигнал, соответствующий полученному значению θR, с выхода ФП 81 поступает на выход (Вых.) АВА 11. Необходимо отметить, что параметрами Х1 и Х2 в ФП 81 вида обозначены сигналы, поступающие на его первый и второй входы соответственно.
Функциональная схема варианта реализации ВКСП 12 (фиг.18) содержит три ФП 84.1, 84.2 и 84.3 вида Х2, четыре умножителя 85.1, 85.2, 85.3 и 85.4, два трехвходовых сумматора 86.1 и 86.2, датчик 87 числа 2, инвертор 88, два сумматора 89.1 и 89.2 и последовательно соединенные делитель 90 и ФП 91 вида  , причем объединенные вход ФП 84.1 и первые входы умножителей 85.1 и 85.2 являются первым входом (Вх.1) ВКСП 12, объединенные вход ФП 84.2, второй вход умножителя 85.1 и первый вход умножителя 85,3 являются вторым входом (Вх.2) ВКСП 12, объединенные вход ФП 84.3 и вторые входы умножителей 85.2 и 85.3 являются третьим входом (Вх.3) ВКСП 12, а выход ФП 91 является выходом (Вых.) ВКСП 12. Кроме того, выходы ФП 84.1, 84.2 и 84.3 подсоединены соответственно к трем входам сумматора 86.1, выход которого подсоединен к объединенным первым входам сумматоров 89.1 и 89.2, выходы которых подсоединены соответственно к первому и второму входам делителя 90. Выходы умножителей 85.1. 85.2 и 85.3 подсоединены соответственно к трем входам сумматора 86.2, выход которого подсоединен к объединенным второму входу умножителя 85.4 и входу инвертора 88, выход которого подсоединен к второму входу сумматора 89.2. И наконец, выход датчика 87 подсоединен к первому входу умножителя 85.4, выход которого подсоединен к второму входу сумматора 89.1.
, причем объединенные вход ФП 84.1 и первые входы умножителей 85.1 и 85.2 являются первым входом (Вх.1) ВКСП 12, объединенные вход ФП 84.2, второй вход умножителя 85.1 и первый вход умножителя 85,3 являются вторым входом (Вх.2) ВКСП 12, объединенные вход ФП 84.3 и вторые входы умножителей 85.2 и 85.3 являются третьим входом (Вх.3) ВКСП 12, а выход ФП 91 является выходом (Вых.) ВКСП 12. Кроме того, выходы ФП 84.1, 84.2 и 84.3 подсоединены соответственно к трем входам сумматора 86.1, выход которого подсоединен к объединенным первым входам сумматоров 89.1 и 89.2, выходы которых подсоединены соответственно к первому и второму входам делителя 90. Выходы умножителей 85.1. 85.2 и 85.3 подсоединены соответственно к трем входам сумматора 86.2, выход которого подсоединен к объединенным второму входу умножителя 85.4 и входу инвертора 88, выход которого подсоединен к второму входу сумматора 89.2. И наконец, выход датчика 87 подсоединен к первому входу умножителя 85.4, выход которого подсоединен к второму входу сумматора 89.1.
ВКСП 12 работает следующим образом. Сигналы, соответствующие однозначным амплитудным значениям R1, R2 и R3 разностных сигналов, с входов Вх.1, Вх.2 и Вх.3 ВКСП 12 поступают соответственно на объединенные вход ФП 84.1 и первые входы умножителей 85.1 и 85.2, на объединенные вход ФП 84.2, второй вход умножителя 85.1 и первый вход умножителя 85.3 и на объединенные вход ФП 84.3 и вторые входы умножителей 85.2 и 85.3. Преобразованные в ФП 84.1, 84.2 и 84.3 сигналы с их выходов поступают соответственно на три входа сумматора 86.1, где производится их суммирование. Просуммированные в сумматоре 86.1 сигналы в виде суммарного сигнала с выхода сумматора 86.1 поступают на объединенные первые входы сумматоров 89.1 и 89.2. Попарно перемноженные в умножителях 85.1, 85.2 и 85.3 сигналы с их выходов поступают соответственно на три входа сумматора 86.2, где производится их суммирование. Просуммированный сигнал с выхода сумматора 86.2 поступает на объединенные вход инвертора 88 и второй вход умножителя 85.4, на первый вход которого поступает сигнал с выхода датчика 87. Сигнал с выхода умножителя 85.4 поступает на второй вход сумматора 89.1, где суммируется с сигналом, поступившим на его первый вход. Сигнал с выхода инвертора 88 поступает на второй вход сумматора 89.2, где суммируется с сигналом, поступившим на его первый вход. Сигналы с выходов сумматоров 89.1 и 89.2 поступают соответственно на первый и второй входы делителя 90. В делителе 90 производится деление амплитуды сигнала, поступившего на его первый вход, на амплитуду сигнала, поступившего на его второй вход. Сигнал с выхода делителя 90 поступает на вход ФП 91 вида  . После преобразования сигнала в ФП 91 сигнал, соответствующий значению параметра μ, характеризующего наличие квадратурной составляющей помехового сигнала, с выхода ФП 91 поступает на выход (Вых.) ВКСП 12.
. После преобразования сигнала в ФП 91 сигнал, соответствующий значению параметра μ, характеризующего наличие квадратурной составляющей помехового сигнала, с выхода ФП 91 поступает на выход (Вых.) ВКСП 12.
Функциональная схема варианта реализации ФВА 13 (фиг.19) содержит входной коммутатор 92, коммутатор 93, шесть умножителей 94.1, 94.2, 94.3, 94.4, 94.5 и 94.6, три делителя 95.1, 95.2 и 95.3, два вычитателя 96.1 и 96.2, ФП 97 вида arcsin(X), сумматор 98, выходной коммутатор 99, выход которого является выходом (Вых.) ФВА 13, датчики 100, 101, 102 и 103 чисел 1, 2, 3 и π соответственно, и, кроме того, функциональный преобразователь (ФП) 104, совпадающий по схеме с АВА 11 (фиг.17), причем объединенные первый вход вычитателя 96.1 и управляющий вход коммутатора 93 являются первым входом (Вх.1) ФВА 13, объединенные вторые входы умножителя 94.4 и вычитателя 96.2 являются вторым входом (Вх.2) ФВА 13, первый, второй и третий входы коммутатора 92 являются соответственно третьим (Вх.3), четвертым (Вх.4) и пятым (Вх.5) входами ФВА 13, объединенные управляющие входы коммутаторов 92 и 99 являются шестым входом (Вх.6) ФВА 13, а первый вход умножителя 94.1 и второй вход умножителя 94.2 являются соответственно седьмым (Вх.7) и восьмым (Вх.8) входами ФВА 13. Кроме того, первые, вторые и третьи выходы первой и второй групп выходов коммутатора 92 подсоединены соответственно к первым, вторым и третьим входам ФП 104 и коммутатора 93, выходы которых подсоединены к первым входам соответственно коммутатора 99 и умножителя 94.2. Выход датчика 103 подсоединен к объединенным вторым входам умножителей 94.1, 94.3 и 94.5. Выходы умножителей 94.2 и 94.1 подсоединены соответственно к первому и второму входам делителя 95.1, выход которого подсоединен к входу ФП 97, выход которого подсоединен к первому входу умножителя 94.4. Выход датчика 100 подсоединен к объединенным второму входу вычитателя 96.1 и первому входу вычитателя 96.2, выход которого подсоединен к первому входу умножителя 94.5, выход которого подсоединен к первому входу делителя 95.3. Выход вычитателя 96.1 подсоединен к первому входу умножителя 94.3, выход которого подсоединен к первому входу умножителя 94.6. Выход датчика 101 подсоединен к объединенным вторым входам делителя 95.3 и умножителя 94.6, выход которого совместно с выходом датчика 102 подсоединены соответственно к первому и второму входам делителя 95.2. Выходы делителя 95.2, умножителя 94.4 и делителя 95.3 подсоединены соответственно к трем входам сумматора 98, выход которого подсоединен к второму входу коммутатора 99.
ФВА 13 работает следующим образом. Сигналы, соответствующие выбранному значению ξ номера антенны, значению коэффициента р однозначности пеленгования, разностям фаз ϕ1, ϕ2 и ϕ3 между разностными сигналами, логической единице или логическому нулю и значениям расстояния b между антеннами и длины волны λ радиосигнала, с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5, Вх.6, Вх.7 и Вх.8 поступают соответственно на объединенные первый вход вычитателя 96.1 и управляющий вход коммутатора 93, на объединенные вторые входы умножителя 94.4 и вычитателя 96.2, на первый, второй и третий входы коммутатора 92, на объединенные управляющие входы коммутаторов 92 и 99, на первый вход умножителя 94.1 и на второй вход умножителя 94.2. В случае поступления с Вх.6 ФВА 13 на объединенные управляющие входы коммутаторов 92 и 99 сигнала логической единицы первый, второй и третий входы коммутатора 92 подсоединяются соответственно к первому, второму и третьему выходам первой группы его выходов, а первый вход коммутатора 99 подсоединяется к его выходу. При этом сигналы с входов Вх.3, Вх.4 и Вх.3 ФВА 13 поступают с первого, второго и третьего входов коммутатора 92 соответственно на первый, второй и третий выходы его первой группы выходов и далее с вышеупомянутых выходов коммутатора 92 поступают соответственно на первый, второй и третий входы ФП 104. В ФП 104 сигналы, соответствующие разностям фаз ϕR1, ϕR2 ϕR3, обрабатываются в полном соответствии с правилами обработки сигналов в вышеупомянутом АВА 11. Сигнал, соответствующий полученному значению азимута θϕ, с выхода ФП 104 поступает на первый вход коммутатора 99 и далее на выход коммутатора 99. Сигнал, соответствующий полученному значению азимута θϕ, с выхода коммутатора 99 поступает на выход (Вых.) ФВА 13. В случае поступления с Вх.6 ФВА 13 на объединенные управляющие входы коммутаторов 92 и 99 сигнала логического нуля первый, второй и третий входы коммутатора 92 подсоединяются соответственно к первому, второму и третьему выходам второй группы его выходов, а второй вход коммутатора 99 подсоединяется к его выходу. При этом сигналы с входов Вх.3, Вх.4 и Вх.5 ФВА 13 поступают с первого, второго и третьего входов коммутатора 92 соответственно на первый, второй и третий выходы его второй группы выходов и далее с вышеупомянутых выходов коммутатора 92 поступают соответственно на первый, второй и третий входы коммутатора 93. В коммутаторе 93 по команде, поступающей на его управляющий вход и соответствующей выбранному значению ξ номера антенны, производится подсоединение его ξ-го входа к его выходу. Далее сигнал, соответствующий выбранному значению разности фаз ϕRξ, с выхода коммутатора 93 поступает на первый вход умножителя 94.2, в котором производится его перемножение с сигналом, поступившем на его второй вход. Сигнал с выхода датчика 103 поступает на объединенные вторые входы умножителей 94.1, 94.3 и 94.5. В умножителе 94.1 производится перемножение пары сигналов, поступивших на его пару входов. Сигналы с выходов умножителей 94.2 и 94.1 поступают соответственно на первый и второй входы делителя 95.1, где производится деление сигнала, поступившего на его первый вход, на сигнал, поступивший на его второй вход. Сигнал с выхода делителя 95.1 поступает на вход ФП 97, где преобразуется в соответствии с функциональной зависимостью arcsin(X) и с выхода ФП 97 поступает на первый вход умножителя 94.4, где производится его перемножение с сигналом, поступившим на второй вход умножителя 94.4. Сигнал с выхода датчика 100 поступает на объединенные второй вход вычитателя 96.1 и первый вход вычитателя 96.2. В вычитателях 96.1 и 96.2 производится вычитание сигналов, поступивших на их вторые входы, из сигналов, поступивших на их первые входы. Сигналы с выходов вычитателей 96.1 и 96.2 поступают на первые входы соответственно умножителей 94.3 и 94.5. Попарно перемноженные в умножителях 94.3 и 94.5 сигналы с их выходов поступают соответственно на первые входы умножителя 94.6 и делителя 95.3. Сигнал с выхода датчика 101 поступает на объединенные вторые входы умножителя 94.6 и делителя 95.3. Пара сигналов, поступивших на входы умножителя 94.6, перемножается, и результирующий сигнал с выхода умножителя 94.6 совместно с сигналом с выхода датчика 102 поступают соответственно на первый и второй входы делителя 95.2. В делителях 95.2 и 95.3 производится деление сигналов, поступивших на их первые входы, на сигналы, поступившие на их вторые входы. Сигналы с выходов делителя 95.2, умножителя 94.4 и делителя 95.3 поступают на соответствующие входы сумматора 98, где производится их суммирование. Просуммированный сигнал, соответствующий значению азимута θϕ, с выхода сумматора 98 поступает на второй вход коммутатора 99, который соединен с его выходом. Сигнал, соответствующий значению азимута θϕ, с выхода коммутатора 99 поступает на выход (Вых.) ФВА 13.
Функциональная схема варианта реализации ВПОА 14 (фиг.20) содержит два вычитателя 105.1 и 105.2, причем первый и второй входы вычитателя 105.1 являются соответственно первым (Вх.1) и вторым (Вх.2) входами ВПОА 14, два ФП 106.1 и 106.2 вида |Х|, причем выход ФП 106.2 является выходом (Вых.) ВПОА 14, элемент сравнения (ЭС) 107, два умножителя 108.1 и 108.2, датчик 109 углового параметра π и датчик 110 числа 2, причем выход вычитателя 105.1 подсоединен к входу ФП 106.1, выход которого подсоединен к объединенным первым входам вычитателя 105.2 и ЭС 107, выход датчика 109 подсоединен к объединенным второму входу ЭС 107 и первому входу умножителя 108.1, выход датчика 110 подсоединен к второму входу умножителя 108.1, выходы ЭС 107 и умножителя 108.1 подсоединены соответственно к первому и второму входам умножителя 108.2, выход которого подсоединен к второму входу вычитателя 105.2, выход которого подсоединен к входу ФП 106.2.
ВПОА 14 работает следующим образом. Сигналы, соответствующие значениям θϕ и θR азимута источника радиосигнала, с входов Вх.1 и Вх.2 поступают соответственно на первый и второй входы вычитателя 105.1. Сигнал, соответствующий разности между вышеупомянутыми значениями азимутов, с выхода вычитателя 105.1 поступает на вход ФП 106.1, где производится определение модуля сигнала, поступившего на его вход. Сигнал с выхода ФП 106.1 поступает на объединенные первые входы вычитателя 105.2 и ЭС 107. Сигнал с выхода датчика 109, соответствующий угловому значению параметра π, поступает на объединенные второй вход ЭС и первый вход умножителя 108.1. В ЭС 107 производится сравнение значений сигналов, поступивших на его пару входов. В случае, если сигнал, поступивший на первый вход 107, не меньше сигнала, поступившего на его второй вход, на его выходе формируется сигнал, соответствующий единице, а в противном случае - сигнал, соответствующий нулю. Сигнал с выхода датчика 110 поступает на второй вход умножителя 108.1, где производится перемножение сигналов, поступивших на его пару входов.
Сигналы с выходов ЭС 107 и умножителя 108.1 поступают соответственно на пару входов умножителя 108.2, где производится их перемножение. Сигнал с выхода умножителя 108.2 поступает на второй вход вычитателя 105.2. В вычитателе 105.2 производится определение разности между сигналами, поступившими на его первый и второй входы соответственно. Сигнал с выхода вычитателя 105.2 поступает на вход ФП 106.2, где производится определение его модуля. Сигнал, соответствующий погрешности Δθ оценки азимута, с выхода ФП 106.2 поступает на выход (Вых.) ВПОА 14.
Вариант реализации ВАПК 15 представляет собой элемент сравнения, формирующий на выходе сигнал в виде логической единицы, в случае, если сигнал, поступивший на его первый вход, не меньше сигнала, поступившего на его второй вход, или сигнал в виде логического нуля в противном случае.
Функциональная схема варианта реализации ВУМ 16 (фиг.21) содержит три ФП 111.1, 111.2 и 111.3 вида X2, семь умножителей 112.1, 112.2, 112.3, 112.4, 112.5, 112.6 и 112.7, два сумматора 113.1 и 113.2, вычитатель 114, ФП 115 вида |Х|, элемент сравнения (ЭС) 116, делитель 117, три коммутатора 118.1, 118.2 и 119, ФП 120 вида  , ФП 121 вида arccos(X), датчики 122, 123, 124 и 125 чисел π, 2, 3 и 1 соответственно, датчик 126 нулевого значения угла наклона фронта волны источника радиосигнала и датчик 127 символа βsp, соответствующего наличию в точке приема радиосигнала, распространяющегося в виде пространственной электромагнитной волны, наклон фронта которой не определен. При этом второй вход умножителя 112.4 и первый вход умножителя 112.5 является соответственно первым (Вх.1) и вторым (Вх.2) входами ВУМ 16. Объединенные вход ФП 111.1 и первые входы умножителей 112.1 и 112.2 являются третьим входом (Вх.3) ВУМ 16. Объединенные вход ФП 111.2, второй вход умножителя 112.1 и первый вход умножителя 112.3 являются четвертым входом (Вх.4) ВУМ 16. Объединенные вход ФП 111.3 и вторые входы умножителей 112.2 и 112.3 являются пятым входом (Вх.5) ВУМ 16. Управляющие входы коммутаторов 118.2 и 119 являются соответственно шестым (Вх.6) и седьмым (Вх.7) входами ВУМ 16, а выход коммутатора 118.2 является выходом (Вых.) ВУМ 16. Кроме того, выходы ФП 111.1, 111.2 и 111.3 и умножителей 112.1, 112.2 и 112.3 подсоединены соответственно к первому, второму и третьему входам сумматоров 113.1 и 113.2, выходы которых подсоединены соответственно к первому и второму входам вычитателя 114, выход которого подсоединен к входу ФП 115, выход которого подсоединен к входу ФП 120, выход которого подсоединен к первому входу умножителя 112.7. Выход умножителя 112.7 подсоединен к объединенным первым входам ЭС 116 и коммутатора 118.1. Выход датчика 125 подсоединен к объединенным вторым входам коммутатора 118.1 и ЭС 116, выход которого подсоединен к управляющему входу коммутатора 118.1, выход которого подсоединен к входу ФП 121, выход которого подсоединен к первому входу коммутатора 118.2. Выход датчика 123 подсоединен к второму входу умножителя 112.5, выход которого подсоединен к первому входу делителя 117. Выход датчика 122 подсоединен к первому входу умножителя 112.4, выход которого совместно с выходом датчика 124 подсоединены соответственно к паре входов умножителя 112.6, выход которого подсоединен к второму входу делителя 117. Выход делителя 117 подсоединен к второму входу умножителя 112.7. И наконец, выходы датчиков 126 и 127 подсоединены соответственно к первому и второму входам коммутатора 119, выход которого подсоединен ко второму входу коммутатора 118.2.
, ФП 121 вида arccos(X), датчики 122, 123, 124 и 125 чисел π, 2, 3 и 1 соответственно, датчик 126 нулевого значения угла наклона фронта волны источника радиосигнала и датчик 127 символа βsp, соответствующего наличию в точке приема радиосигнала, распространяющегося в виде пространственной электромагнитной волны, наклон фронта которой не определен. При этом второй вход умножителя 112.4 и первый вход умножителя 112.5 является соответственно первым (Вх.1) и вторым (Вх.2) входами ВУМ 16. Объединенные вход ФП 111.1 и первые входы умножителей 112.1 и 112.2 являются третьим входом (Вх.3) ВУМ 16. Объединенные вход ФП 111.2, второй вход умножителя 112.1 и первый вход умножителя 112.3 являются четвертым входом (Вх.4) ВУМ 16. Объединенные вход ФП 111.3 и вторые входы умножителей 112.2 и 112.3 являются пятым входом (Вх.5) ВУМ 16. Управляющие входы коммутаторов 118.2 и 119 являются соответственно шестым (Вх.6) и седьмым (Вх.7) входами ВУМ 16, а выход коммутатора 118.2 является выходом (Вых.) ВУМ 16. Кроме того, выходы ФП 111.1, 111.2 и 111.3 и умножителей 112.1, 112.2 и 112.3 подсоединены соответственно к первому, второму и третьему входам сумматоров 113.1 и 113.2, выходы которых подсоединены соответственно к первому и второму входам вычитателя 114, выход которого подсоединен к входу ФП 115, выход которого подсоединен к входу ФП 120, выход которого подсоединен к первому входу умножителя 112.7. Выход умножителя 112.7 подсоединен к объединенным первым входам ЭС 116 и коммутатора 118.1. Выход датчика 125 подсоединен к объединенным вторым входам коммутатора 118.1 и ЭС 116, выход которого подсоединен к управляющему входу коммутатора 118.1, выход которого подсоединен к входу ФП 121, выход которого подсоединен к первому входу коммутатора 118.2. Выход датчика 123 подсоединен к второму входу умножителя 112.5, выход которого подсоединен к первому входу делителя 117. Выход датчика 122 подсоединен к первому входу умножителя 112.4, выход которого совместно с выходом датчика 124 подсоединены соответственно к паре входов умножителя 112.6, выход которого подсоединен к второму входу делителя 117. Выход делителя 117 подсоединен к второму входу умножителя 112.7. И наконец, выходы датчиков 126 и 127 подсоединены соответственно к первому и второму входам коммутатора 119, выход которого подсоединен ко второму входу коммутатора 118.2.
ВУМ 16 работает следующим образом. Сигналы, соответствующие расстоянию b между антеннами, длине волны λ радиосигнала, разностям фаз ϕR1, ϕR2 и ϕR3 между разностными сигналами и первому и второму сигналам логических единиц или нулей, с входов Вх.1, Вх.2, Вх.3, Вх.4, Вх.5, Вх.6 и Вх.7 ВУМ 16 поступают соответственно на второй вход умножителя 112.4, на первый вход умножителя 112.5, на объединенные вход ФП 111.1 и первые входы умножителей 112.1 и 112.2, на объединенные вход ФП 111.2, второй вход умножителя 112.1 и первый вход умножителя 112.3, на объединенные вход ФП 111.3 и вторые входы умножителей 112.2 и 112.3, на управляющий вход коммутатора 118.2 и на управляющий вход коммутатора 119.
Сигналы, преобразованные в ФП 111.1, 111.2 и 111.3, с их выходов поступают на соответствующие входы сумматора 113.1. Попарно перемноженные сигналы с выходов умножителей 112.1, 112.2 и 112.3 поступают на соответствующие входы сумматора 113.2. Сигналы, просуммированные в каждом из сумматоров 113.1 и 113.2, с их выходов поступают соответственно на первый и второй входы вычитателя 114. После вычитания из сигнала, поступившего на первый вход вычитателя 114, сигнала, поступившего на его второй вход, полученный разностный сигнал с выхода вычитателя 114 поступает на вход ФП 115, где производится определение его модуля. Сигнал с выхода ФП 115 поступает на вход ФП 120, где преобразуется в соответствии с функциональной зависимостью  и с выхода ФП 120 поступает на первый вход умножителя 112.7. Сигнал с выхода датчика 123 поступает на второй вход умножителя 112.5. После перемножения сигналов в умножителе 112.5 сигнал с его выхода поступает на первый вход делителя 117. Сигнал с выхода датчика 122 поступает на первый вход умножителя 112.4, где производится его перемножение с сигналом, поступившим на его второй вход. Сигналы с выходов умножителя 112.4 и датчика 124 поступают соответственно на пару входов умножителя 112.6, где производится их перемножение. Сигнал с выхода умножителя 112.6 поступает на второй вход делителя 117. В делителе 117 производится деление сигнала, поступившего на его первый вход, на сигнал, поступивший на его второй вход. Сигнал с выхода делителя 117 поступает на второй вход умножителя 112.7, где производится его перемножение с сигналом, поступившим на его первый вход.
и с выхода ФП 120 поступает на первый вход умножителя 112.7. Сигнал с выхода датчика 123 поступает на второй вход умножителя 112.5. После перемножения сигналов в умножителе 112.5 сигнал с его выхода поступает на первый вход делителя 117. Сигнал с выхода датчика 122 поступает на первый вход умножителя 112.4, где производится его перемножение с сигналом, поступившим на его второй вход. Сигналы с выходов умножителя 112.4 и датчика 124 поступают соответственно на пару входов умножителя 112.6, где производится их перемножение. Сигнал с выхода умножителя 112.6 поступает на второй вход делителя 117. В делителе 117 производится деление сигнала, поступившего на его первый вход, на сигнал, поступивший на его второй вход. Сигнал с выхода делителя 117 поступает на второй вход умножителя 112.7, где производится его перемножение с сигналом, поступившим на его первый вход.
Сигнал с выхода умножителя 112.7 поступает на объединенные первые входы ЭС 116 и коммутатора 118.1. Сигнал с выхода датчика 125 поступает на объединенные вторые входы ЭС 116 и коммутатора 118.1. В ЭС 116 формируется сигнал логической единицы в случае, если сигнал, поступивший на его первый вход меньше сигнала, поступившего на его второй вход, или сигнал логического нуля в противном случае. Сигнал логических единицы или нуля с выхода ЭС 116 поступает на управляющий вход коммутатора 118.1. В случае поступления на управляющий вход коммутатора 118.1 сигнала логической единицы его первый вход подсоединяется к его выходу и, соответственно, сигнал с его первого входа поступает на его выход, а в случае поступления на управляющий вход коммутатора 118.1 сигнала логического нуля его второй вход подсоединяется к его выходу и, соответственно, сигнал с его второго входа поступает на его выход. Сигнал с выхода коммутатора 118.1 поступает на вход ФП 121, после преобразования в котором с выхода ФП 121 сигнал поступает на первый вход коммутатора 118.2.
Сигналы с выходов датчиков 126 и 127 поступают соответственно на первый и второй входы коммутатора 119. В случае поступления на управляющий вход коммутатора 119 сигнала логической единицы его первый вход подсоединяется к его выходу и, соответственно, сигнал с его первого входа поступает на его выход, а в случае поступления на управляющий вход коммутатора 119 сигнала логического нуля его второй вход подсоединяется к его выходу и, соответственно, сигнал с его второго входа поступает на его выход. Сигнал с выхода коммутатора 119 поступает на второй вход коммутатора 118.2. В случае поступления на управляющий вход коммутатора 118.2 сигнала логической единицы его первый вход подсоединяется к его выходу и, соответственно, сигнал с его первого входа поступает на его выход, а в случае поступления на управляющий вход коммутатора 118.2 логического нуля его второй вход подсоединяется к его выходу и, соответственно, сигнал с его второго входа поступает на его выход. Сигнал, соответствующий значению угла β наклона фронта волны ИРИ, с выхода коммутатора 118.2 поступает на выход (Вых.) ВУМ 16.
Функциональная схема варианта реализации БОА 17 (фиг.22) содержит вычитатель 128, два сумматора 129.1 и 129.2, делитель 130, ФП 131 вида |Х|, элемент сравнения (ЭС) 132, умножитель 133, два коммутатора 134.1 и 134.2 и датчики 135 и 136 значения π и числа 2 соответственно, причем управляющий вход коммутатора 134.1 является первым входом (Вх.1) БОА 17, а выход коммутатора 134.1 является выходом (Вых.) БОА 17, объединенные вторые входы вычитателя 128 и сумматора 129.1 являются вторым входом (Вх.2) БОА 17, объединенные первые входы вычитателя 128 и сумматора 129.1 и второй вход коммутатора 134.2 являются третьим входом (Вх.3) БОА 17, а управляющий вход коммутатора 134.2 является четвертым входом (Вх.4) БОА 17. Кроме того, выход вычитателя 128 подсоединен к входу ФП 131, выход которого подсоединен к первому входу ЭС 132. Выход датчика 135 подсоединен к объединенным вторым входам ЭС 132 и умножителя 133. Выход ЭС 132 подсоединен к первому входу умножителя 133. Выход сумматора 129.1 совместно с выходом датчика 136 подсоединены соответственно к первому и второму входам делителя 130, выход которого совместно с выходом умножителя 133 подсоединены соответственно к паре входов сумматора 129.2, выход которого подсоединен к объединенным первым входам коммутаторов 134.1 и 134.2.
БОА 17 работает следующим образом. Сигналы, соответствующие первому сигналу логической единицы или нуля, значению азимута θϕ, значению азимута θR и второму сигналу логических единицы или нуля, с входов Вх.1, Вх.2, Вх.3 и Вх.4 БОА 17 поступают соответственно на управляющий вход коммутатора 134.1, на объединенные входы вычитателя 128 и сумматора 129.1, на объединенные первые входы вычитателя 128 и сумматора 129.1 и второй вход коммутатора 134.2 и на управляющий вход коммутатора 134.2. Сигнал с выхода вычитателя 128 поступает на вход ФП 131 и далее, с его выхода поступает на первый вход ЭС 132. Суммарный сигнал с выхода сумматора 129.1 и сигнал с выхода датчика 136 поступают соответственно на первый и второй входы делителя 130, где производится деление сигнала, поступившего на его первый вход, на сигнал, поступивший на его второй вход. Сигнал с выхода датчика 135 поступает на объединенные вторые входы ЭС 132 и умножителя 133. На выходе ЭС 132 формируется сигнал, соответствующий единице в случае, если сигнал, поступивший на его первый вход, не меньше сигнала, поступившего на его второй вход, или сигнал, соответствующий нулю, в противном случае. Сигнал с выхода ЭС 132 поступает на первый вход умножителя 133, где производится его перемножение с сигналом, поступившим на его второй вход. Сигналы с выходов умножителя 133 и делителя 130 поступают соответственно на пару входов сумматора 129.2, где производится их суммирование. Сигнал с выхода сумматора 129.2 поступает на объединенные первые входы коммутаторов 134.1 и 134.2. В случае поступления на управляющий вход коммутатора 134.2 сигнала логической единицы его первый вход подсоединяется к его выходу, и, соответственно, сигнал с его первого входа поступает на его выход. В случае поступления на управляющий вход коммутатора 134.2 сигнала логического нуля его второй вход подсоединяется к его выходу, и, соответственно, сигнал с его второго входа поступает на его выход. В случае поступления на управляющий вход коммутатора 134.1 сигнала логической единицы его первый вход подсоединяется к его выходу, и, соответственно, сигнал с его первого входа поступает на его выход. А в случае поступления на управляющий вход коммутатора 134.1 сигнала логического нуля его второй вход подсоединяется к его выходу, и, соответственно, сигнал с его второго входа поступает на его выход. Сигнал, соответствующий однозначному значению азимута θ, с выхода коммутатора 134.1 поступает на выход (Вых.) БОА 17.
Функциональная схема варианта реализации каждого из БФРС 4.1, 4.2 и 4.3 (фиг.23) содержит два вычитателя 137.1 и 137.2, два ФП 138.1 и 138.2 вида X2 и последовательно соединенные сумматор 139 и ФП 140 вида  , причем первые входы вычитателей 137.1 и 137.2 являются соответственно первым (Вх.11) и вторым (Вх.12) входами первой пары входов БФРС 4.1 (4.2, 4.3), вторые входы вычитателей 137.1 и 137.2 являются соответственно первым (Вх.21) и вторым (Вх.22) входами второй пары входов БФРС 4.1 (4.2, 4.3), выход вычитателя 137.1 подсоединен к входу ФП 138.1 и одновременно является вторым выходом (Вых.2) БФРС 4.1 (4.2, 4.3), выход вычитателя 137.2 подсоединен к входу ФП 138.2 и одновременно является третьим выходом (Вых.3) БФРС 4.1 (4.2, 4.3), выходы ФП 138.1 и 138.2 подсоединены соответственно к паре входов сумматора 139, а выход ФП 140 является первым выходом (Вых.1) БФРС 4.1 (4.2, 4.3).
, причем первые входы вычитателей 137.1 и 137.2 являются соответственно первым (Вх.11) и вторым (Вх.12) входами первой пары входов БФРС 4.1 (4.2, 4.3), вторые входы вычитателей 137.1 и 137.2 являются соответственно первым (Вх.21) и вторым (Вх.22) входами второй пары входов БФРС 4.1 (4.2, 4.3), выход вычитателя 137.1 подсоединен к входу ФП 138.1 и одновременно является вторым выходом (Вых.2) БФРС 4.1 (4.2, 4.3), выход вычитателя 137.2 подсоединен к входу ФП 138.2 и одновременно является третьим выходом (Вых.3) БФРС 4.1 (4.2, 4.3), выходы ФП 138.1 и 138.2 подсоединены соответственно к паре входов сумматора 139, а выход ФП 140 является первым выходом (Вых.1) БФРС 4.1 (4.2, 4.3).
БФРС 4.1 (4.2, 4.3) работает следующим образом. Сигналы, соответствующие действительной и мнимой составляющим первого сигнала, действительной и мнимой составляющими второго сигнала, с входов Вх.11, Вх.12, Вх.21 и Вх.22 БФРС 4.1 (4.2, 4.3) поступают соответственно на первые входы вычитателей 137.1 и 137.2 и на вторые входы вычитателей 137.1 и 137.2. В каждом из вычитателей 137.1 и 137.2 производится вычитание сигнала, поступившего на его второй вход, из сигнала, поступившего на его первый вход. Сигналы с выходов вычитателей 137.1 и 137.2, соответствующие действительной и мнимой составляющим разностного сигнала, поступают соответственно на входы ФП 138.1 и 138.2 и, кроме того, соответственно, на второй (Вых.2) и третий (Вых.3) выходы БФРС 4.1 (4.2, 4.3). После преобразования сигналов в ФП 138.1 и 138.2 сигналы с их выходов поступают соответственно на пару входов сумматора 139, где они суммируются, и далее просуммированный сигнал с выхода сумматора 139 поступает на вход ФП 140. После преобразования сигнала в ФП 140 сигнал, соответствующий амплитудному значению разностного сигнала, с выхода ФП 140 поступает на первый выход (Вых.1) БФРС 4.1 (4.2, 4.3).
Специалистам понятно, что варианты реализации различных блоков функциональной схемы радиопеленгатора (фиг.6) могут иметь различные конструктивные отличия, не являющиеся предметом настоящего изобретения. Так, варианты реализации антенн 1.1, 1.2 и 1.3 приведены, например, в [12. Драбкин А.Л., Зузенко В.Л., Кислов А.Г. Антенно-фидерные устройства. - М.: Сов. радио, 1974], радиоприемных блоков 2.1, 2.2 и 2.3 - в [13. Рэд Эт. Т. Схемотехника радиоприемников. Практическое пособие: Пер. с нем. - М.: Мир, 1989]; [14. Ашихмин А.В. Сергеев В.Б., Сергиенко А.Р. Радиоприемные тракты комплексов автоматизированного радиоконтроля: особенности, решения и перспективы. - Специальная техника, специальный выпуск, 2002, с.57-64]; [15. Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987]; [16. Нефедов Е.И., Саидов А.С., Тагилаев А.Р. Широкополосные микрополосковые управляющие устройства СВЧ. - М.: Радио и связь, 1994]. Реализация других блоков устройства и их функциональных элементов, основанных на цифровой обработке сигналов, описана в ряде работ [17. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - М.: Мир, 1978]; [18. Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. - М.: Мир, 1986]; [19. Угрюмов Е.П. Цифровая схемотехника. - СПб.: БХВ - Петербург, 2001]; [20. Куприянов М.С., Матюшкин Б.Д. Цифровая обработка сигналов: процессоры, алгоритмы, средства проектирования. - СПб.: Политехника, 1999].
Предложенные способ радиопеленгования и радиопеленгатор для его осуществления реализованы при модернизации малой серии радиоэлектронных комплексов обнаружения и определения местоположения источников радиоизлучения. Внешний вид эквидистантной кольцевой антенной решетки, содержащей три идентичные ненаправленные осесимметричные антенны вибраторного типа в симметричном исполнении с вышеупомянутыми электродинамическими размерами, размещенной на мачтовом устройстве, обеспечивающей функционирование радиопеленгатора в соответствии с предложенным способом радиопеленгования в рабочем диапазоне изменения длин волн λ радиосигнала с коэффициентом перекрытия  (λmax и λmin - максимальная и минимальная длина волны рабочего диапазона длин волн) представлен на фиг.24, а внешний вид приемоиндикатора радиопеленгатора, включающего остальные блоки радиопеленгатора и монитор автоматизированного рабочего места (АРМ) оператора, представлен на фиг.25. На фиг.26, 27 и 28 приведены экспериментальные результаты пеленгования широкополосного источника радиоизлучения одним из образцов вышеупомянутого радиопеленгатора при следующих условиях: а) спектральные составляющие пеленгуемого сигнала равномерно распределены в полосе длин волн λmax≤λ≤λmin с коэффициентом перекрытия kλ=4; б) расстояние b между антеннами решетки и длина 2la симметричных антенн решетки удовлетворяет условиям
(λmax и λmin - максимальная и минимальная длина волны рабочего диапазона длин волн) представлен на фиг.24, а внешний вид приемоиндикатора радиопеленгатора, включающего остальные блоки радиопеленгатора и монитор автоматизированного рабочего места (АРМ) оператора, представлен на фиг.25. На фиг.26, 27 и 28 приведены экспериментальные результаты пеленгования широкополосного источника радиоизлучения одним из образцов вышеупомянутого радиопеленгатора при следующих условиях: а) спектральные составляющие пеленгуемого сигнала равномерно распределены в полосе длин волн λmax≤λ≤λmin с коэффициентом перекрытия kλ=4; б) расстояние b между антеннами решетки и длина 2la симметричных антенн решетки удовлетворяет условиям  и
и  соответственно; в) отношение сигнал/шум на частотах измерений составляло в среднем 30 дБ; г) сигналы от пеленгуемого источника радиоизлучения до радиопеленгатора распространялись в виде поверхностных электромагнитных волн (β=0); д) истинные значения азимутов θ ИРИ составляли 181° (фиг.26), 196,8° (фиг.27) и 211,7° (фиг.28) соответственно; е) результаты пеленгования отмечались на экране монитора АРМ оператора в виде точек на частотной оси (оси длин волн λ радиосигнала) в полярной системе координат (частота составляющих радиосигнала соответствует и пропорциональна радиальной координате, а значение азимута соответствует угловой координате) и, кроме того, в виде фрагмента таблицы текущих измеренных значений азимутов частотных составляющих широкополосного источника радиоизлучения. Усредненная по всем азимутальным направлениям и частотным составляющим систематическая средняя квадратическая ошибка σθs определения азимута вышеупомянутым радиопеленгатором, включающая как методическую, так и структурную (обусловленную погрешностями калибровки каналов радиопеленгатора и неидентичностью конструкции антенной решетки) составляющие, при проведении серии повторяющихся экспериментов в различных условиях составляет (0,5÷0,7)°. Из сравнения результатов экспериментальных исследований, приведенных на фиг.26, 27 и 28 для различных азимутов θ, следует, что методическая составляющая ошибок пеленгования, устранение которой является целью изобретения, проявляющаяся согласно предложенному способу пеленгования в максимальной степени для азимутального направления θ=196,8°, не превышает структурную составляющую ошибок пеленгования, проявляющуюся для всех азимутальных направлений и полностью определяющую ошибки пеленгования для азимутальных направлений θ=181° и θ=211,7°. Необходимо отметить, что согласно фиг.5 для указанных электродинамических размеров трехэлементной решетки (кривая 3 на фиг.5) методические составляющие ошибок пеленгования, обусловленные взаимным влиянием антенн и мачтового устройство, свойственные аналогу [8], на порядок превышают общие систематические ошибки, характерные для радиопеленгатора, реализующего предложенный способ радиопеленгования.
соответственно; в) отношение сигнал/шум на частотах измерений составляло в среднем 30 дБ; г) сигналы от пеленгуемого источника радиоизлучения до радиопеленгатора распространялись в виде поверхностных электромагнитных волн (β=0); д) истинные значения азимутов θ ИРИ составляли 181° (фиг.26), 196,8° (фиг.27) и 211,7° (фиг.28) соответственно; е) результаты пеленгования отмечались на экране монитора АРМ оператора в виде точек на частотной оси (оси длин волн λ радиосигнала) в полярной системе координат (частота составляющих радиосигнала соответствует и пропорциональна радиальной координате, а значение азимута соответствует угловой координате) и, кроме того, в виде фрагмента таблицы текущих измеренных значений азимутов частотных составляющих широкополосного источника радиоизлучения. Усредненная по всем азимутальным направлениям и частотным составляющим систематическая средняя квадратическая ошибка σθs определения азимута вышеупомянутым радиопеленгатором, включающая как методическую, так и структурную (обусловленную погрешностями калибровки каналов радиопеленгатора и неидентичностью конструкции антенной решетки) составляющие, при проведении серии повторяющихся экспериментов в различных условиях составляет (0,5÷0,7)°. Из сравнения результатов экспериментальных исследований, приведенных на фиг.26, 27 и 28 для различных азимутов θ, следует, что методическая составляющая ошибок пеленгования, устранение которой является целью изобретения, проявляющаяся согласно предложенному способу пеленгования в максимальной степени для азимутального направления θ=196,8°, не превышает структурную составляющую ошибок пеленгования, проявляющуюся для всех азимутальных направлений и полностью определяющую ошибки пеленгования для азимутальных направлений θ=181° и θ=211,7°. Необходимо отметить, что согласно фиг.5 для указанных электродинамических размеров трехэлементной решетки (кривая 3 на фиг.5) методические составляющие ошибок пеленгования, обусловленные взаимным влиянием антенн и мачтового устройство, свойственные аналогу [8], на порядок превышают общие систематические ошибки, характерные для радиопеленгатора, реализующего предложенный способ радиопеленгования.
Предложенный способ радиопеленгования по сравнению с ближайшим аналогом [10] обеспечивает:
во-первых, при одинаковом отношении расстояния b между антеннами трехэлементной решетки к длине волны радиосигнала уменьшение в 2 раза ошибок "разноса";
во-вторых, при одинаковой предельно допустимой вероятности возникновения аномальных ошибок пеленгования, связанных с искажением фазовых диаграмм направленности антенн из-за взаимного влияния антенн и мачтового устройства, и случайных ошибок измерения разностей фаз между сигналами, принятыми антеннами с существенно различающимися амплитудными диаграммами направленности, возможность увеличения в (1,9÷2,2) раза расстояния b между антеннами трехэлементной решетки, что обеспечивает соответствующее улучшение предельной чувствительности радиопеленгования;
в-третьих, устранение методических составляющих ошибок определения угла β наклона фронта волны радиосигнала, обусловленных взаимным влиянием между антеннами и влиянием мачтового устройства.
Кроме того, предложенные способ радиопеленгования и радиопеленгатор для его осуществления по сравнению с ближайшим аналогом [10] и другими аналогами [8], [9] позволяют проводить оценку достоверности результатов пеленгования (определение наличия в момент измерений помехового радиосигнала или оценивание отношения сигнал/(шум + помеха)) без статистической обработки результатов измерений, обычно применяемой в вышеуказанных случаях, что позволяет повысить эффективность функционирования радиопеленгатора в сложной радиоэлектронной обстановке и обеспечивает возможность создания быстродействующих автоматических радиопеленгаторов.
Свойственные предложенным способу радиопеленгования и радиопеленгатору для его осуществления малые ошибки "разноса", не превышающие 0,45° при максимальном для однозначного пеленгования относительном размере базы решетки  , отсутствие зависимости погрешности определения азимута θ и угла β наклона фронта волны от степени электродинамического взаимодействия между антеннами трехэлементной решетки и влияния мачтового устройства, возможность оценивания отношения сигнал/(помеха + шум) без необходимости статистической обработки результатов измерений в течение увеличенного промежутка времени, позволяет повысить точность и угловую чувствительность малобазовых радиопеленгаторов и обеспечить возможность оперативного оценивания достоверности результатов пеленгования.
, отсутствие зависимости погрешности определения азимута θ и угла β наклона фронта волны от степени электродинамического взаимодействия между антеннами трехэлементной решетки и влияния мачтового устройства, возможность оценивания отношения сигнал/(помеха + шум) без необходимости статистической обработки результатов измерений в течение увеличенного промежутка времени, позволяет повысить точность и угловую чувствительность малобазовых радиопеленгаторов и обеспечить возможность оперативного оценивания достоверности результатов пеленгования.
Наиболее успешно заявленные способ радиопеленгования и радиопеленгатор для его осуществления могут быть использованы в широкополосных быстродействующих мобильных комплексах обнаружения и определения местоположения источников радиоизлучения, предназначенных, в том числе, для функционирования в сложной радиоэлектронной обстановке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598648C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2346288C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ | 1999 |
|
RU2158001C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| АМПЛИТУДНЫЙ СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2521959C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2201599C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| СПОСОБ ОДНОЗНАЧНОГО ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2185636C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ | 2004 |
|
RU2262119C1 |
| СПОСОБ ОДНОЗНАЧНОГО ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 1997 |
|
RU2124215C1 |
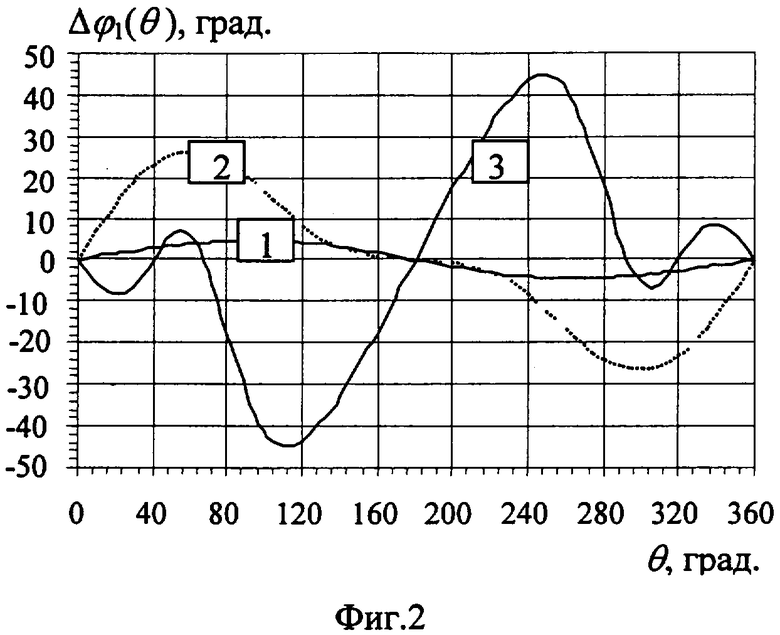
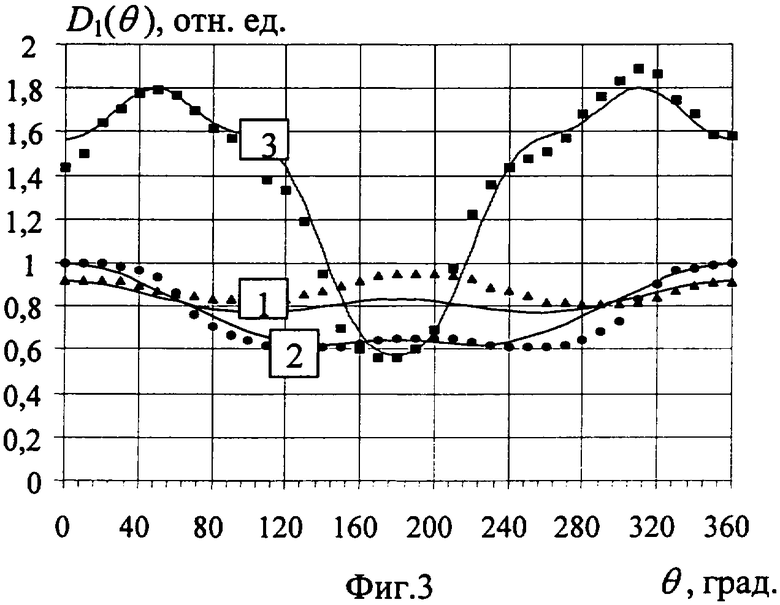
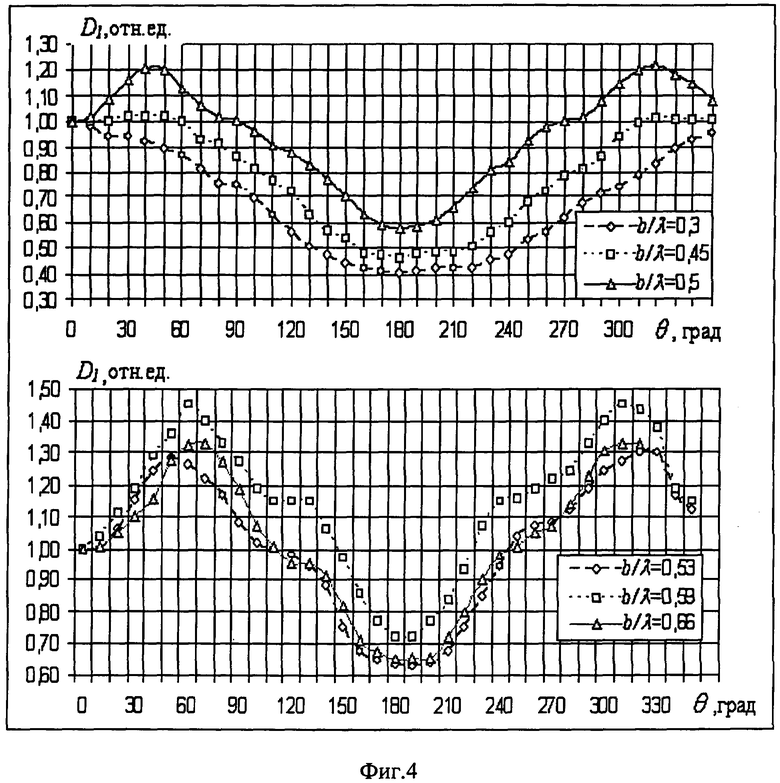
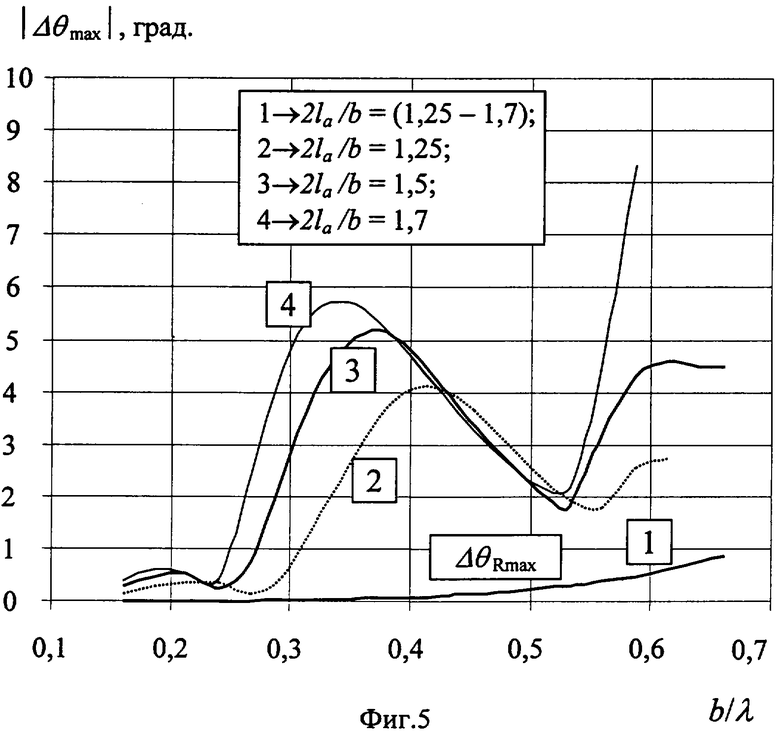
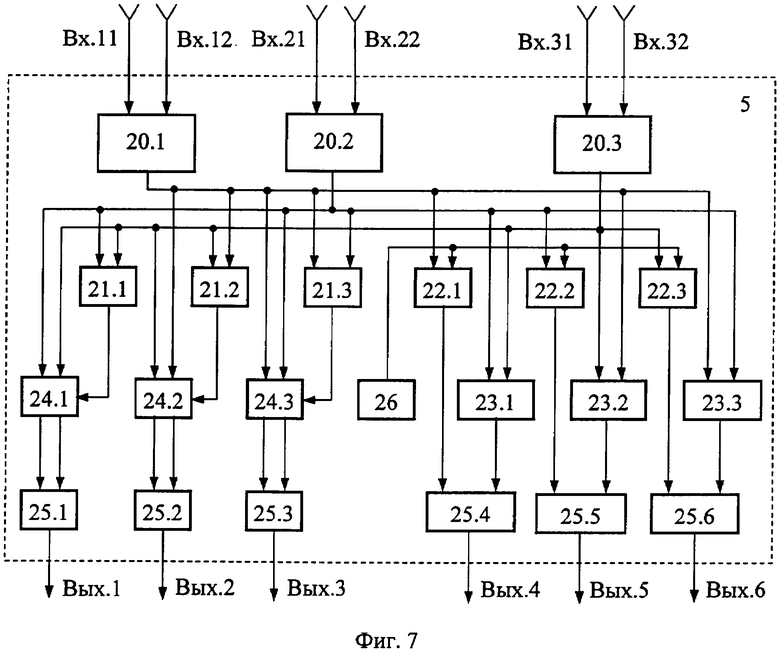
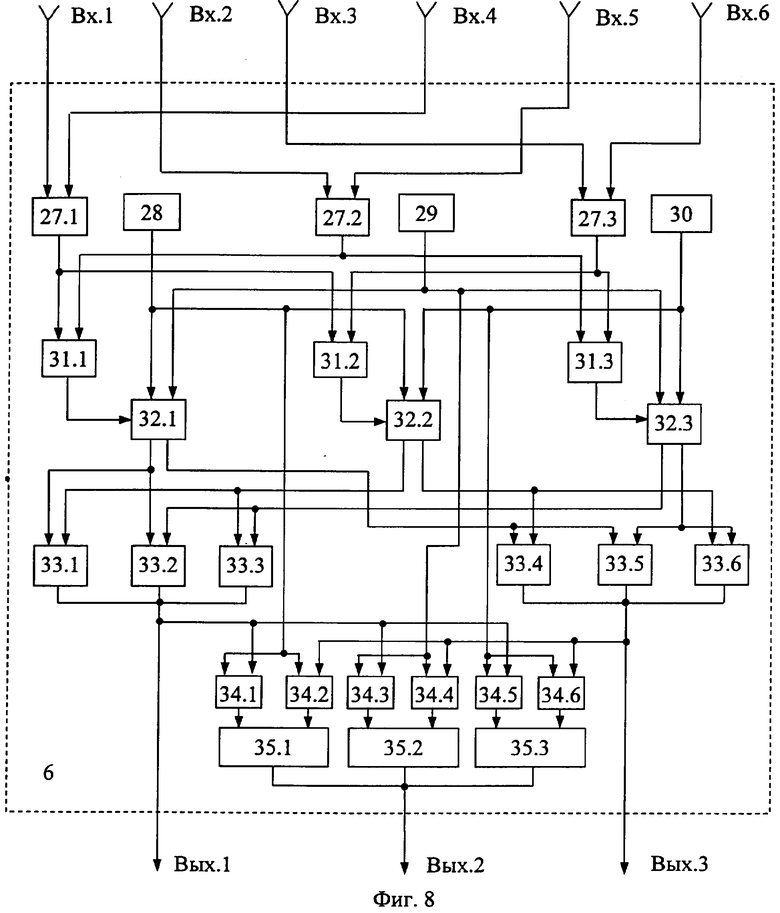
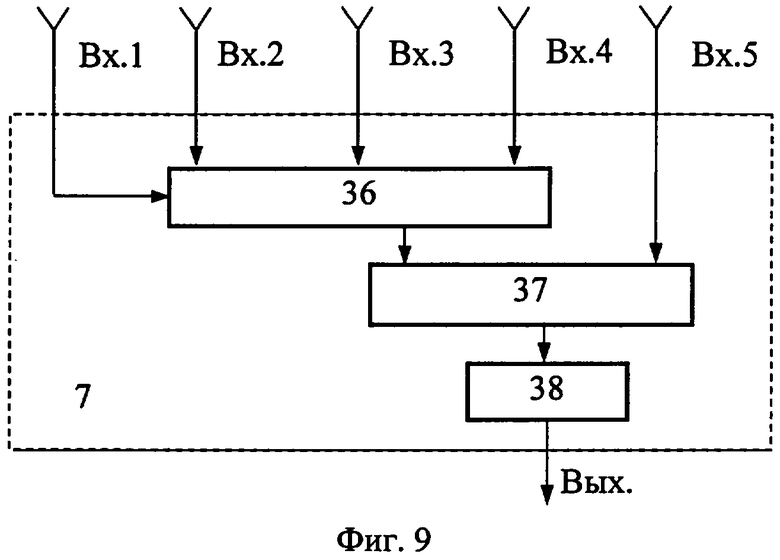
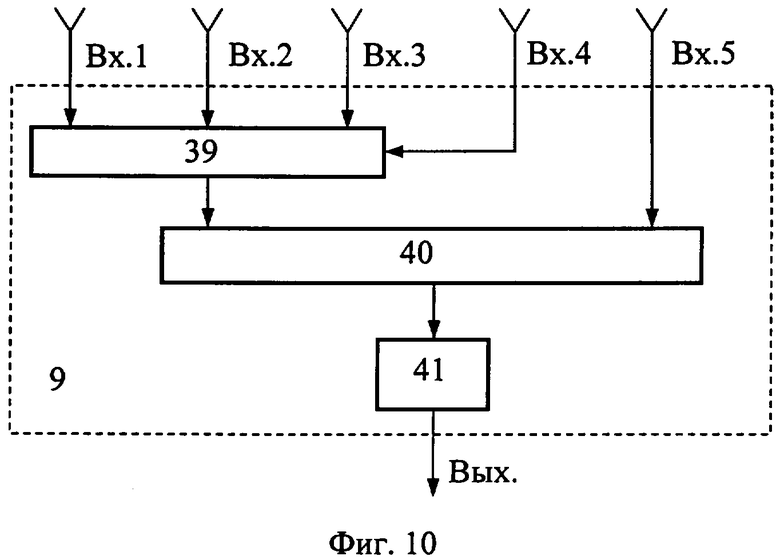
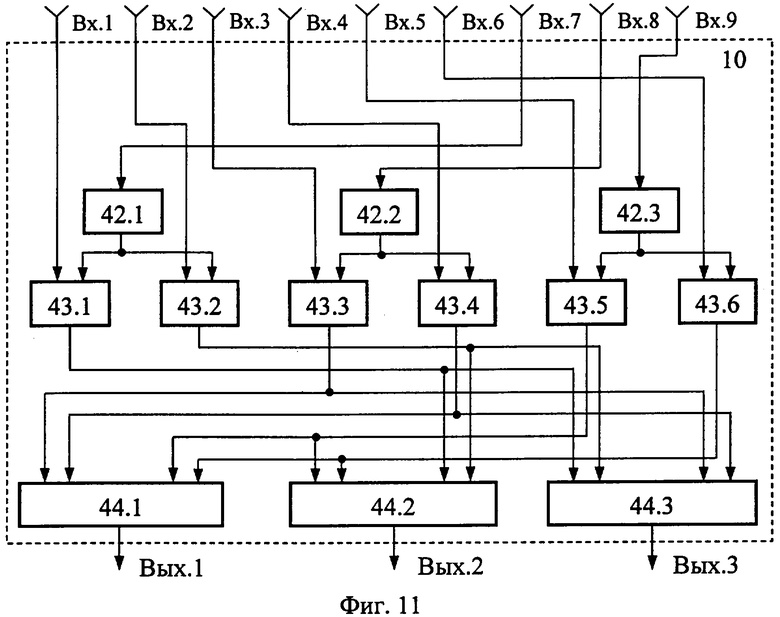
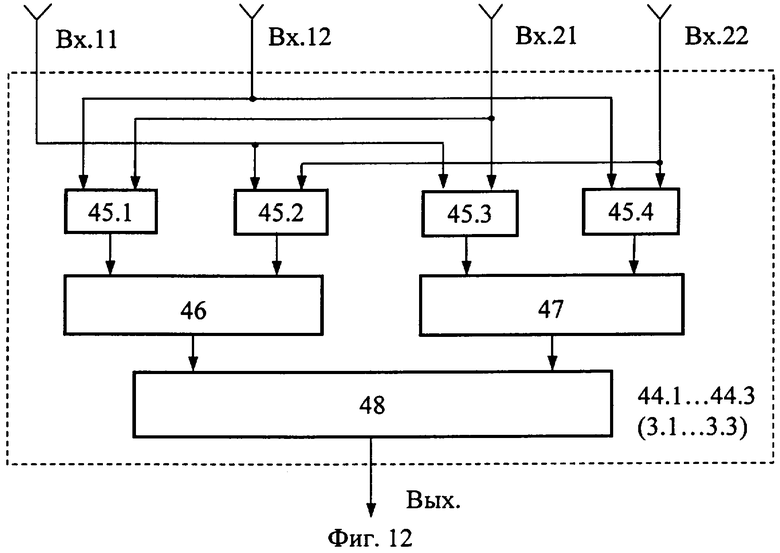
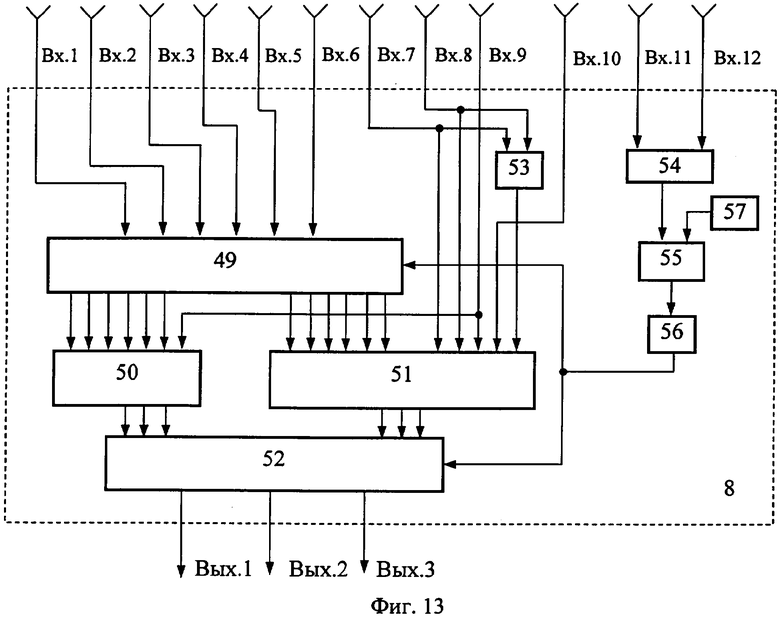
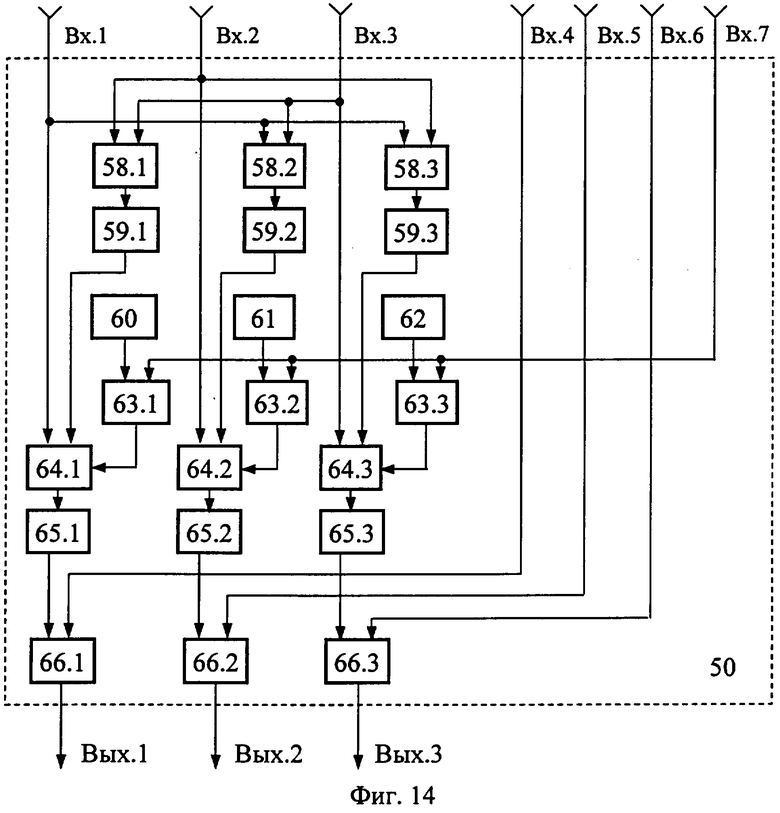
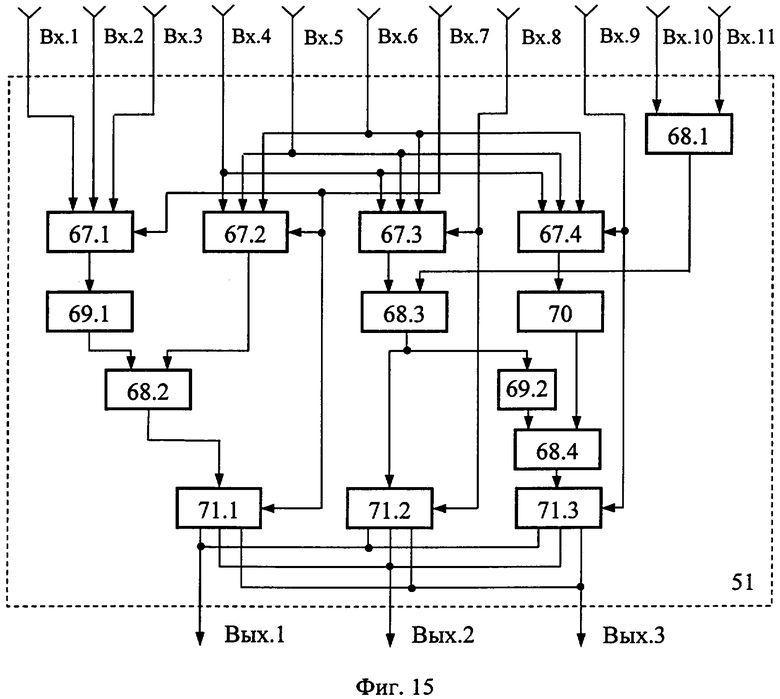
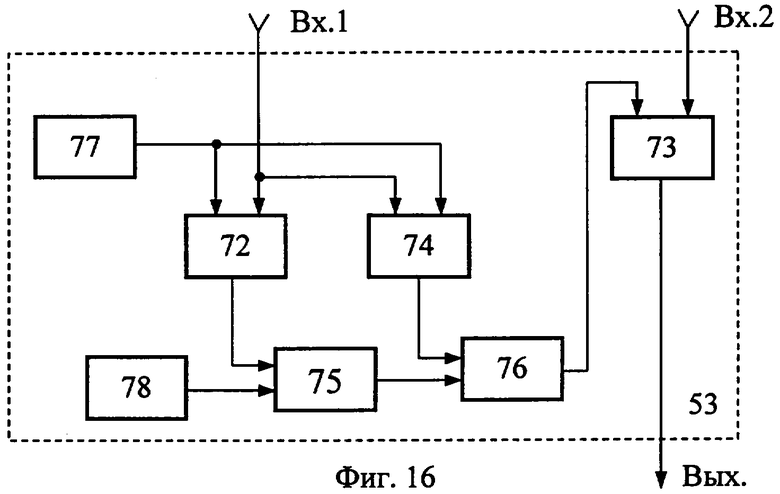
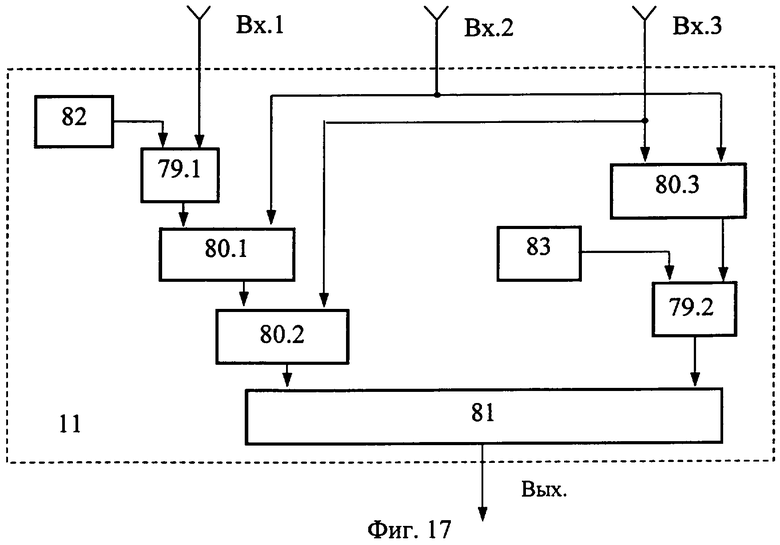
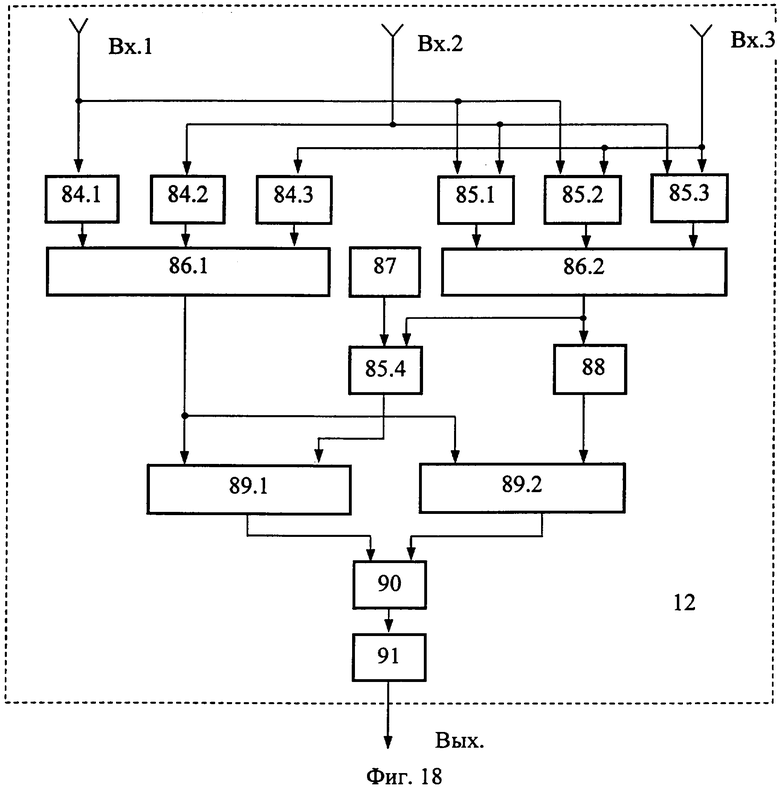
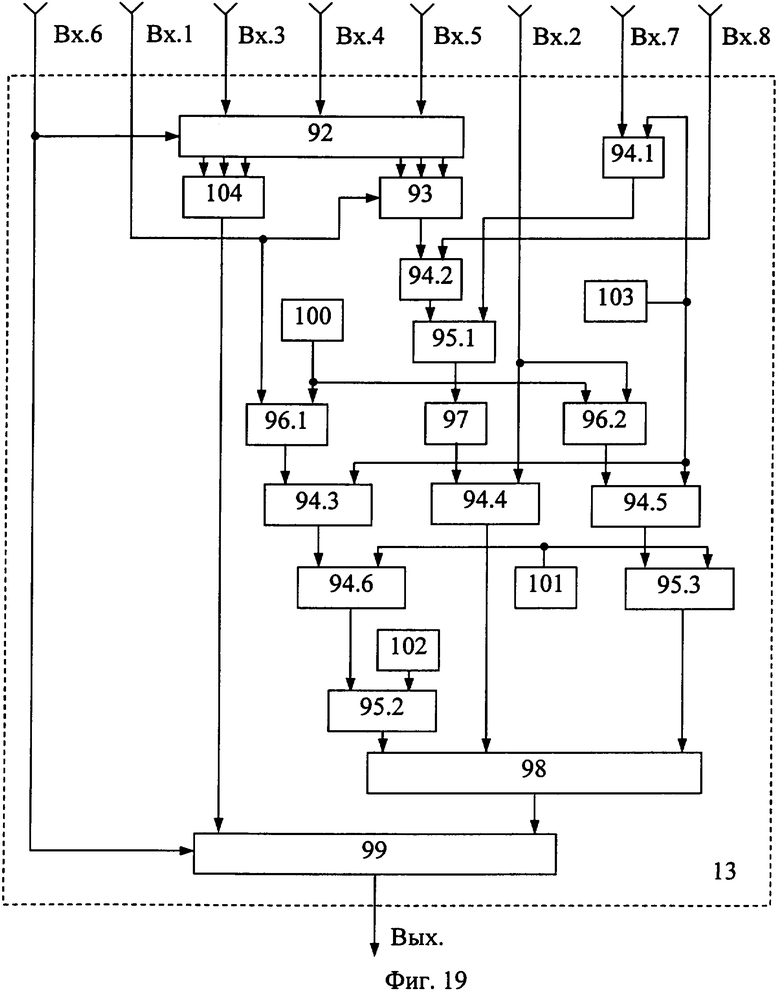
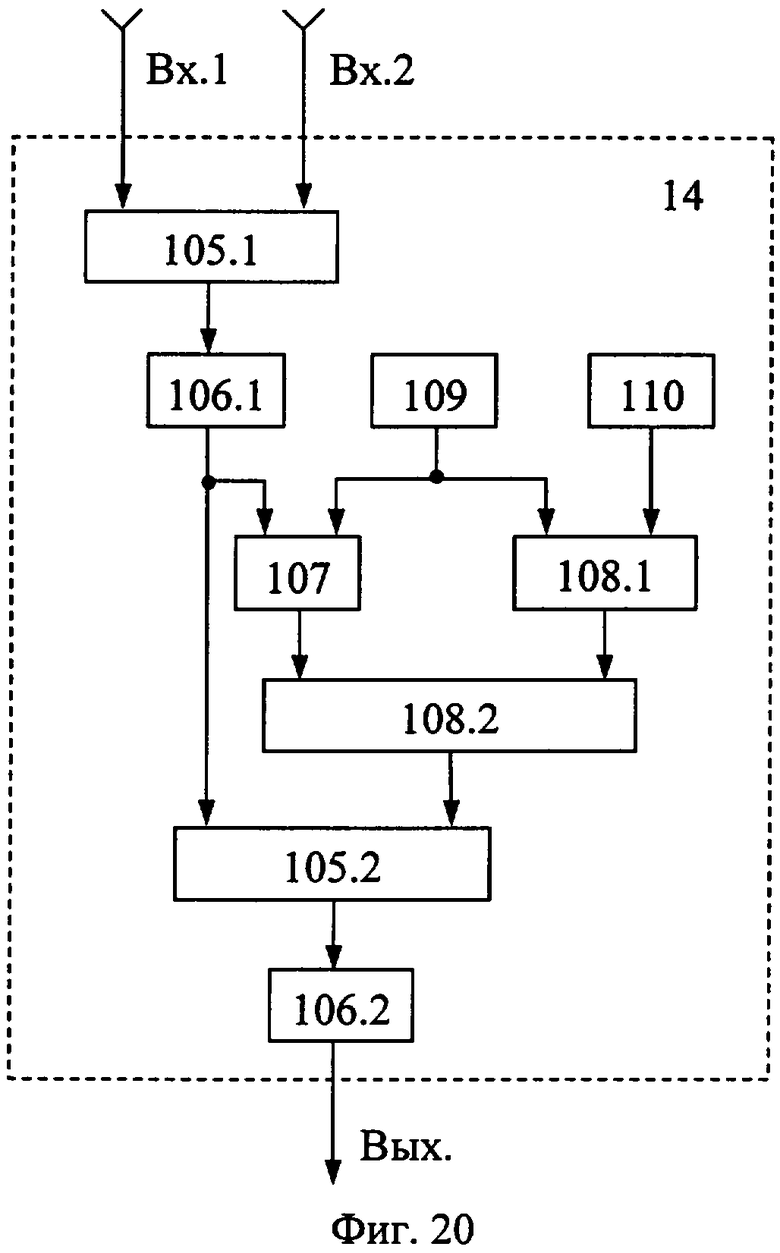
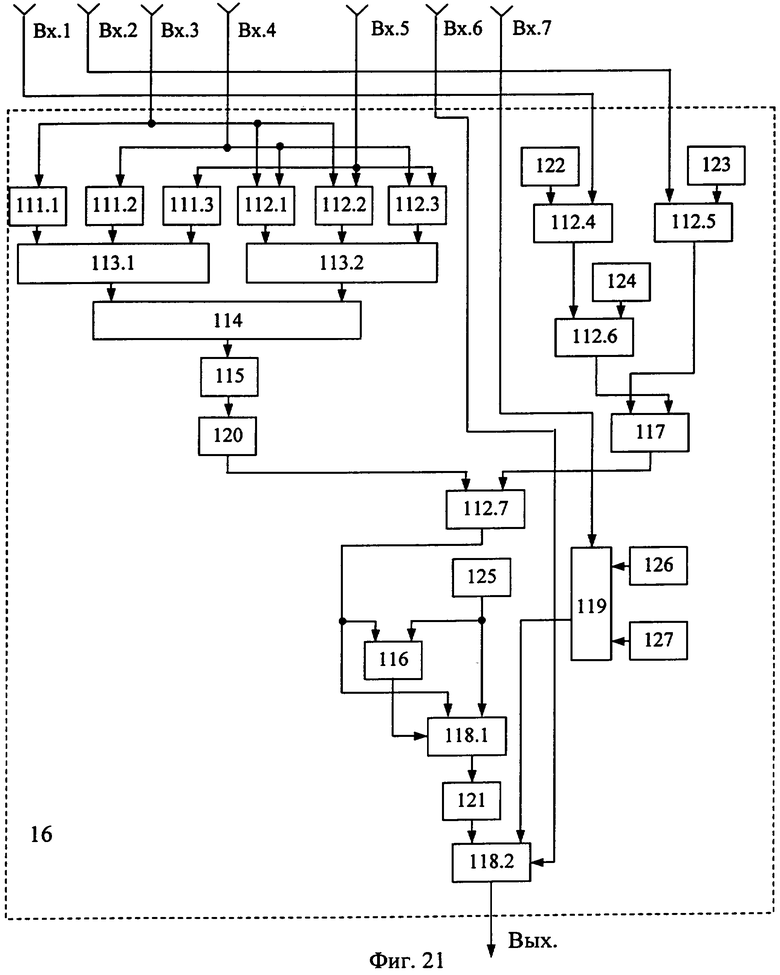
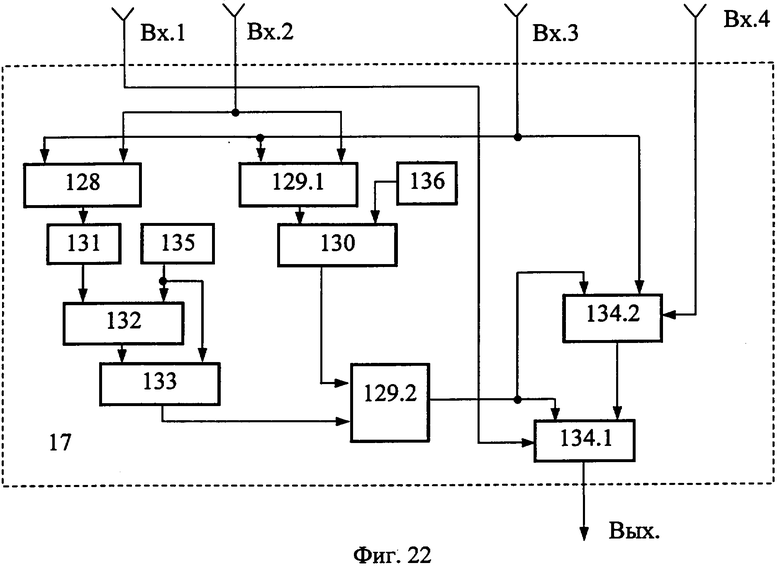
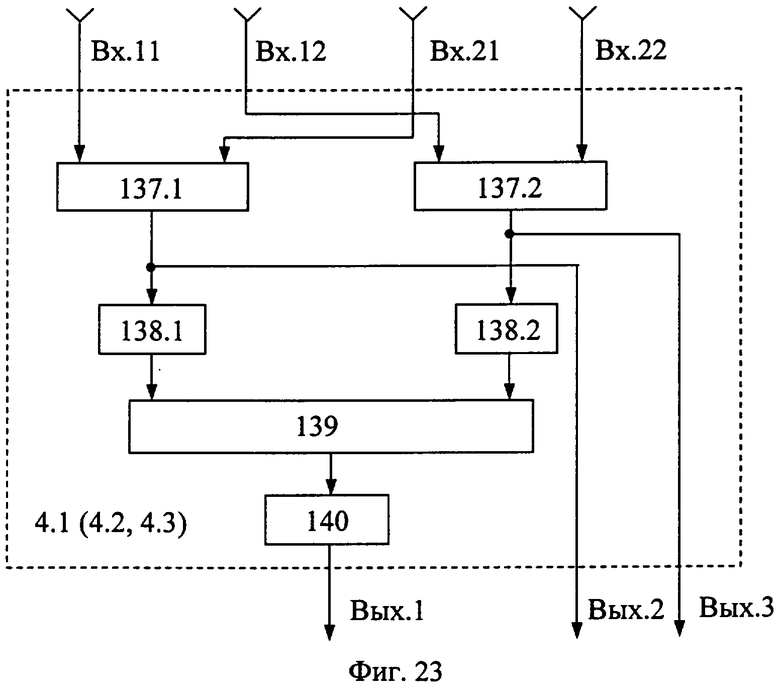
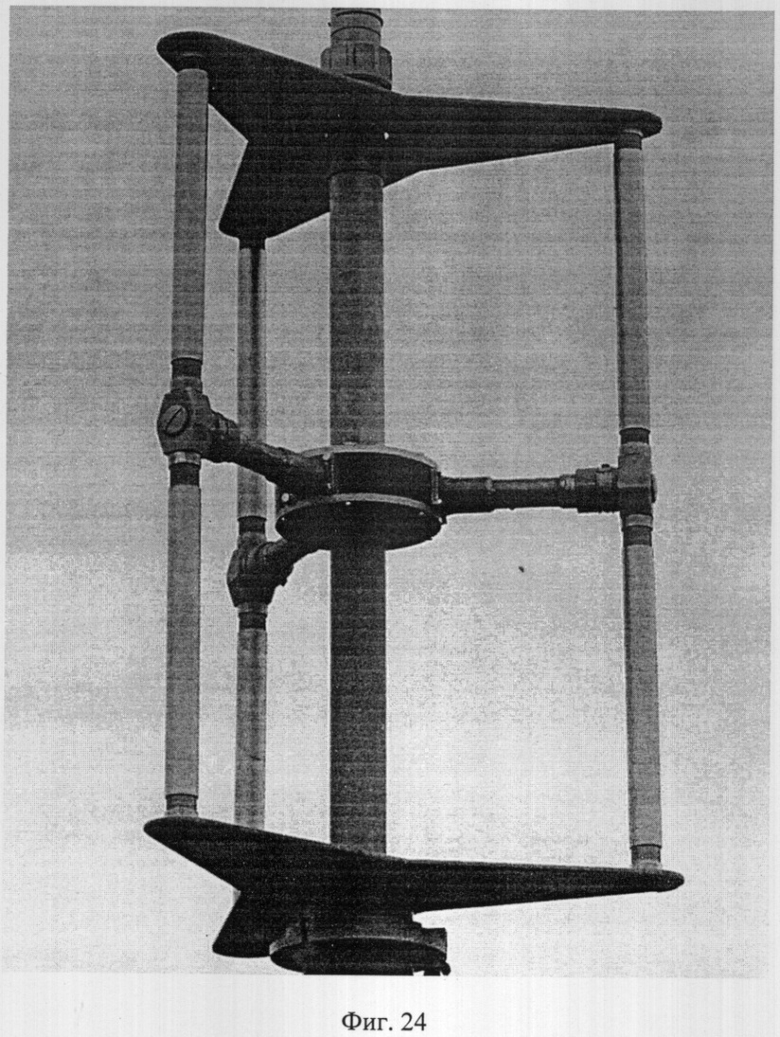
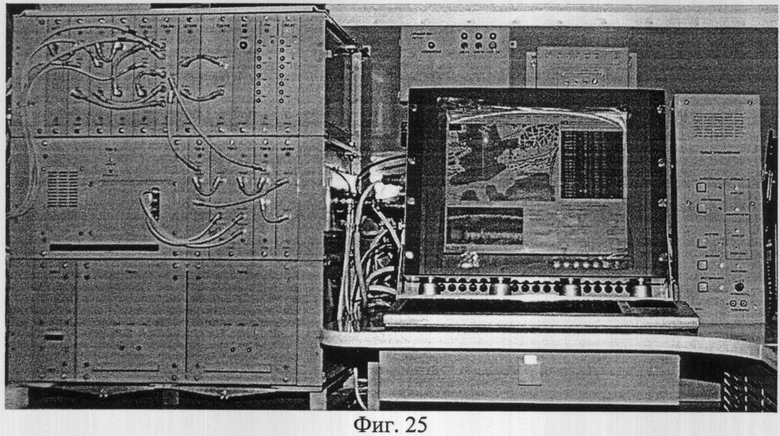
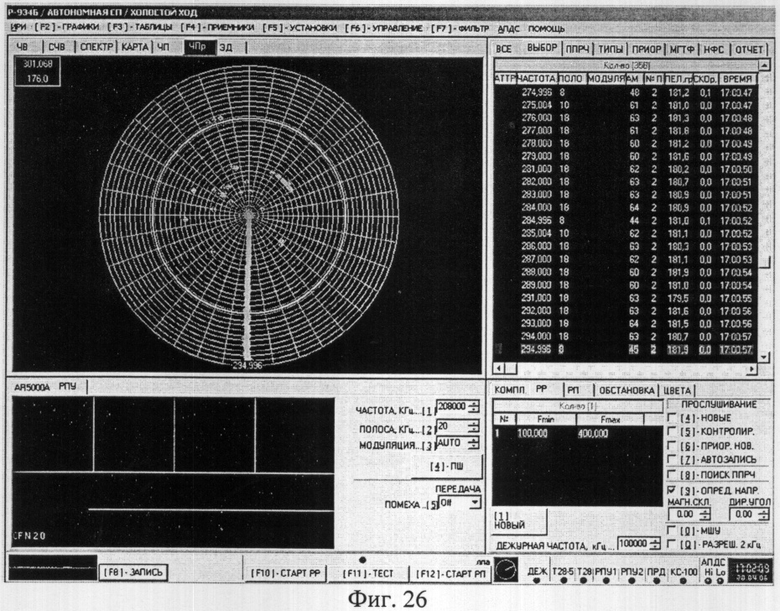
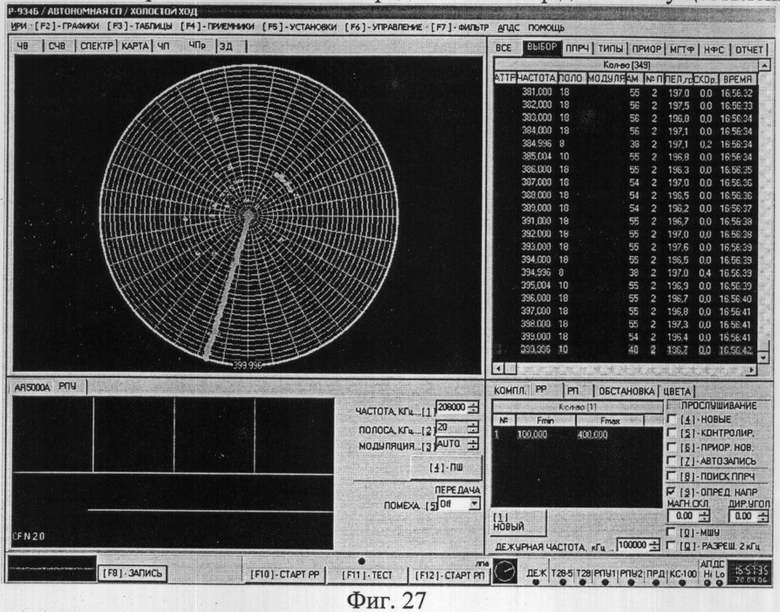
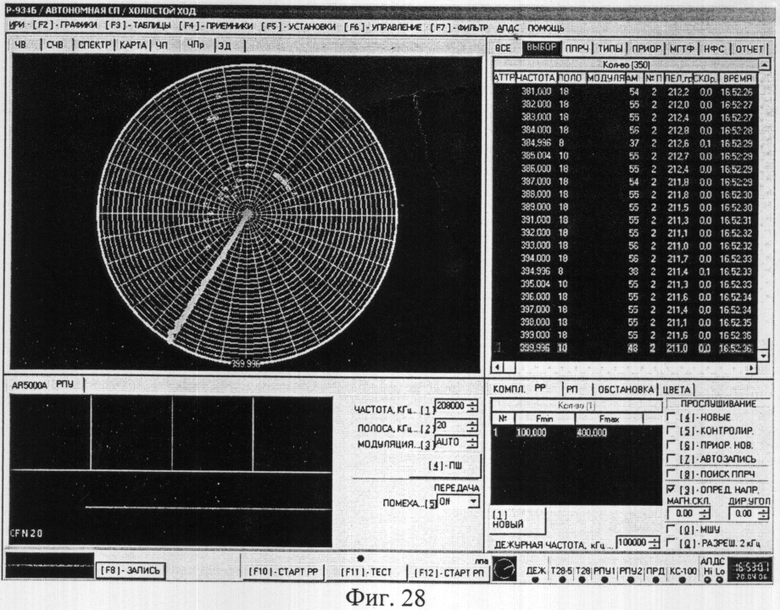
Изобретение относится к радиотехнике и может быть использовано в системах обнаружения и определения местоположения источников радиоизлучения. Достигаемым техническим результатом является повышение точности и чувствительности пеленгования. Указанный результат достигается в способе за счет уменьшения методических составляющих систематических ошибок пеленгования, случайных составляющих ошибок пеленгования, обусловленных искажением пространственно-временной структуры электромагнитных волн пеленгуемых радиосигналов из-за электродинамического взаимодействия между антеннам пеленгационного измерителя и влияния мачтового устройства, путем определения значения параметра, характеризующего наличие квадратурной составляющей помехового сигнала и погрешности оценки азимута, по которым судят о достоверности результатов определения азимута и угла наклона электромагнитной волны источника радиосигнала. В устройстве технический результат достигается за счет введения дополнительных средств и их связей. 2 н.п. ф-лы, 28 ил.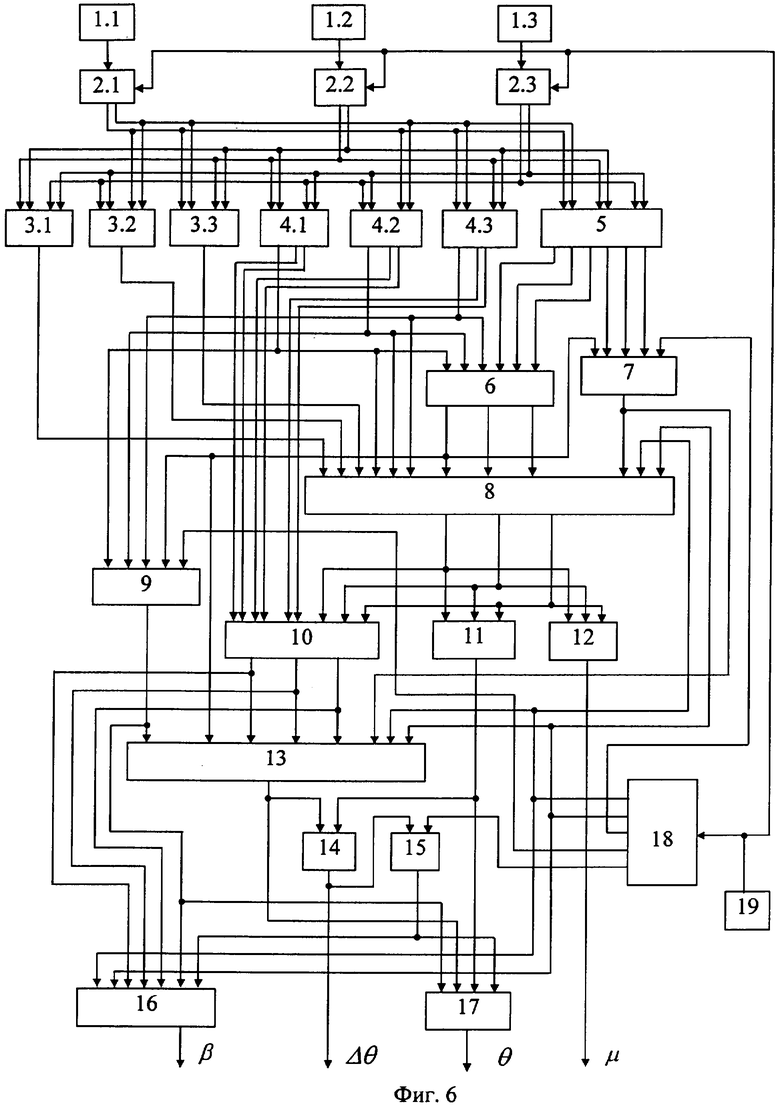
 радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, измерение разностей фаз ϕi между сигналами
радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, измерение разностей фаз ϕi между сигналами  и
и  , принятыми n-ой и k-ой антеннами, в соответствии с формулой
, принятыми n-ой и k-ой антеннами, в соответствии с формулой
где i=1, 2, 3;
 - символ Кронекера;
- символ Кронекера;
 - символ Кронекера,
- символ Кронекера,
формирование разностных сигналов  и их амплитудных значений ri, по формуле
и их амплитудных значений ri, по формуле
и измерение азимута θR источника радиосигнала с использованием трех однозначных амплитудных значений разностных сигналов Ri по формуле
отличающийся тем, что дополнительно измеряют амплитудные значения ui, сигналов, принятых i-ыми антеннами решетки, в соответствии с выражением

и формируют коэффициенты Рi и Кi неравномерности диаграмм направленности антенн в составе решетки по формулам
где  - знаковая функция,
- знаковая функция,
выбирают из трех значений индексов i порядковых номеров антенн i=1, i=2, i=3 одно значение индекса ξ, одно значение индекса γ и одно значение индекса v, не равные между собой, из условия
rξPξ≤rγPγ≤rvPv,
причем значению индекса ξ присваивают значение индекса i, при котором произведение riРi является минимальным или одним из минимальных при равенстве вышеупомянутых произведений riРi, а значению индекса v присваивают значение индекса i, при котором произведение riРi является максимальным или одним из максимальных при равенстве вышеупомянутых произведений riРi, а значению индекса γ присваивают оставшееся значение индекса i, определяют коэффициент р однозначности пеленгования в соответствии с выражением
где Кmid - априорно известное среднее значение коэффициентов Кi неравномерности диаграмм направленности антенн, зависящее от электродинамических размеров антенн, конструкции решетки и мачтового устройства,
формируют три однозначных амплитудных значения разностных сигналов Ri в случае, если расстояние b между антеннами не превышает трех десятых частей длины волны λ радиосигнала, в соответствии с выражением
Ri=risgn{Fi},
где 
а в случае, если расстояние b между антеннами превышает три десятых части длины волны λ радиосигнала, в соответствии с выражением
где 
 - символ Кронекера,
- символ Кронекера,
 - знаковая функция параметра Y, принимающего значения Y=ϕi, или Y=Rγ соответственно,
- знаковая функция параметра Y, принимающего значения Y=ϕi, или Y=Rγ соответственно,
измеряют разности фаз ϕRi между разностными сигналами  по формуле
по формуле

где - знаковая функция параметра Y, принимающего значения Y=Rk или Y=Rn соответственно,
определяют значение параметра μ, характеризующего наличие квадратурной составляющей помехового сигнала, по формуле

проводят проверку выполнения условия превышения минимальной амплитуды rξ разностных сигналов относительно априорно известной минимальной амплитуды разностного сигнала rmin по формуле
rξ≥rmin,
rmin=qminUeff;
qmin - априорно известное минимально необходимое отношение сигнал/шум, обеспечивающее пеленгование источников радиоизлучения с заданными точностью и вероятностью;
Ueff - действующее значение напряжения внутреннего шума каналов формирования разностных сигналов,
определяют азимут θϕ источника радиосигнала с использованием разностей фаз ϕRi между разностными сигналами по формулам

где b - расстояние между антеннами, не превышающее двух третьих длины волны λ радиосигнала,
определяют погрешность Δθ оценки азимута θ по формуле

где 
определяют азимут θ и оценивают угол β наклона фронта волны источника радиосигнала по формулам

где 
βsp - признак наличия в точке приема радиосигнала, распространяющегося в виде пространственной электромагнитной волны, наклон фронта которой не может быть определен и находится в пределах 
Δθmax - априорно известное значение максимально допустимой ошибки определения азимута θ,
а по значениям параметра μ и погрешности Δθ судят о достоверности результатов определения азимута θ и угла β наклона фронта волны источника радиосигнала, причем указанная достоверность обратно пропорциональна величинам параметра μ и погрешности Δθ определения азимута источника радиосигнала.
радиан соответственно, а геометрические размеры антенн по их осям симметрии соизмеримы с длиной волны λ радиосигнала, три идентичных радиоприемных блока, выполненных с общим гетеродином, входы которых соединены с выходами соответствующих антенн, три блока измерения разности фаз, три блока формирования разностных сигналов, компаратор, блок формирования однозначных амплитудных значений разностных сигналов, амплитудный вычислитель азимута, вычислитель угла места, датчик параметров вычислений и генератор управляющих сигналов, причем пара выходов первого радиоприемного блока соединена соответственно с вторыми парами входов вторых блоков измерения разности фаз и формирования разностных сигналов и первыми парами входов третьих блоков измерения разности фаз и формирования разностных сигналов, пара выходов второго радиоприемного блока соединена соответственно с первыми парами входов первых блоков измерения разности фаз и формирования разностных сигналов и вторыми парами входов третьих блоков измерения разности фаз и формирования разностных сигналов, пара выходов третьего радиоприемного блока соединена соответственно с вторыми парами входов первых блоков измерения разности фаз и формирования разностных сигналов и первыми парами входов вторых блоков измерения разности фаз и формирования разностных сигналов, выходы первого, второго и третьего блоков измерения разности фаз, первые выходы первого, второго и третьего блоков формирования разностных сигналов и первый, второй, и третий выходы компаратора соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым входами блока формирования однозначных амплитудных значений разностных сигналов, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами амплитудного вычислителя азимута, выход генератора управляющих сигналов соединен с управляющими входами первого, второго и третьего радиоприемных блоков и управляющим входом датчика параметров вычислений, первый и второй выходы которого, являющиеся выходами сигнала, соответствующего априорно известному расстоянию b между антеннами, и сигнала, соответствующего значению длины волны радиосигнала λ, соединены соответственно с первым и вторым входами вычислителя угла места, выход которого является выходом значения угла β наклона фронта волны источника радиосигнала, отличающийся тем, что расстояние между антеннами выбрано не превышающим двух третьих длины волны радиосигнала, компаратор выполнен с возможностью определения упорядоченной совокупности трех номеров антенн, через фазовые центры которых последовательно во времени проходит фронт электромагнитной волны источника радиосигнала, датчик параметров вычислений выполнен с возможностью формирования априорно известных среднего значения Kmid коэффициентов неравномерности диаграмм направленности антенн в составе решетки, минимальной амплитуды разностного сигнала rmin, при которой обеспечивается минимально необходимое отношение сигнал/шум qmin относительно действующего значения напряжения Ueff внутреннего шума каналов формирования разностных сигналов радиопеленгатора, и максимально допустимой ошибки Δθmax определения азимута, блок формирования однозначных амплитудных значений разностных сигналов выполнен с возможностью формирования амплитудных значений разностных сигналов с учетом знаков разностей фаз между сигналами, принятыми антеннами, в случае, если расстояние b между антеннами не превышает трех десятых частей длины волны λ радиосигнала, или с учетом результатов сравнения амплитуд сигналов, принятых антеннами трехэлементной решетки, в случае, если расстояние b между антеннами превышает три десятые части длины волны λ радиосигнала, вычислитель угла места выполнен с возможностью адаптивной оценки угла места с использованием разностей фаз между разностными сигналами, принятыми тремя различными парами антенн, в зависимости от отношения минимальной амплитуды разностных сигналов к действующему значению напряжения внутреннего шума каналов формирования разностных сигналов радиопеленгатора и погрешности оценки азимута радиосигнала, и дополнительно введены блок формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн, первая, вторая и третья пары входов которого соединены с парами выходов первого, второго и третьего радиоприемных блоков соответственно, вычислитель коэффициента однозначности пеленгования, вычислитель шумового порогового коэффициента, блок определения разности фаз между разностными сигналами, вычислитель квадратурной составляющей помехового сигнала, фазовый вычислитель азимута, вычислитель погрешности оценки азимута, вычислитель азимутального порогового коэффициента и блок определения азимута, причем вторые и третьи выходы первого, второго и третьего блоков формирования разностных сигналов соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами блока определения разности фаз между разностными сигналами, а первые выходы первого, второго и третьего блоков формирования разностных сигналов соединены соответственно с объединенными первыми, объединенными вторыми и объединенными третьими входами компаратора и вычислителя шумового порогового коэффициента, первый выход компаратора соединен с объединенными четвертым входом вычислителя шумового порогового коэффициента и первыми входами вычислителя коэффициента однозначности пеленгования и фазового вычислителя азимута, первый, второй, третий, четвертый, пятый и шестой выходы блока формирования коэффициентов неравномерности амплитудных диаграмм направленности антенн соединены соответственно с четвертым, пятым и шестым входами компаратора и вторым, третьим и четвертым входами вычислителя коэффициента однозначности пеленгования, пятый вход и выход которого соединены соответственно с третьим выходом датчика параметров вычислений, являющимся выходом сигнала, соответствующего априорно известному среднему значению коэффициента неравномерности диаграмм направленности антенн в составе антенной решетки, и объединенными десятым входом блока формирования однозначных амплитудных значений разностных сигналов и вторым входом фазового вычислителя азимута, первый, второй и третий выходы блока формирования однозначных амплитудных значений разностных сигналов соединены соответственно с объединенными первым входом вычислителя квадратурной составляющей помехового сигнала и седьмым входом блока определения разности фаз между разностными сигналами, с объединенными вторым входом вычислителя квадратурной составляющей помехового сигнала и восьмым входом блока определения разности фаз между разностными сигналами и с объединенными третьим входом вычислителя квадратурной составляющей помехового сигнала и девятым входом блока определения разности фаз между разностными сигналами, первый, второй и третий выходы которого соединены соответственно с объединенными третьими, объединенными четвертыми и объединенными пятыми входами вычислителя угла места и фазового вычислителя азимута, объединенные шестые входы фазового вычислителя азимута и вычислителя угла места и первый вход блока определения азимута соединены с выходом вычислителя шумового порогового коэффициента, пятый вход которого соединен с четвертым выходом датчика параметров вычислений, являющимся выходом сигнала, соответствующего априорно известному значению минимальной амплитуды разностного сигнала, при котором обеспечивается минимально необходимое отношение сигнал/шум относительно действующего значения напряжения внутреннего шума каналов формирования разностных сигналов радиопеленгатора, выход фазового вычислителя азимута соединен с объединенными первым входом вычислителя погрешности оценки азимута и вторым входом блока определения азимута, третий вход которого, объединенный с вторым входом вычислителя погрешности оценки азимута, соединен с выходом амплитудного вычислителя азимута, выход вычислителя погрешности оценки азимута и пятый выход датчика параметров вычислений, являющийся выходом сигнала, соответствующего априорно известному значению максимально допустимой ошибки определения азимута, соединены соответственно с первым и вторым входами вычислителя азимутального порогового коэффициента, выход которого соединен с объединенными седьмым входом вычислителя угла места и четвертым входом блока определения азимута, первый и второй выходы датчика параметров вычислений соединены соответственно с объединенными одиннадцатым входом блока формирования однозначных амплитудных значений разностных сигналов и седьмым входом фазового вычислителя азимута и с объединенными двенадцатым входом блока формирования однозначных амплитудных значений разностных сигналов и восьмым входом фазового вычислителя азимута, причем выход блока определения азимута является выходом значения азимута 9 источника радиосигнала, а выходы вычислителя квадратурной составляющей помехового сигнала и вычислителя погрешности оценки азимута являются выходами параметров достоверности результатов пеленгования μ и Δθ соответственно.| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ | 1999 |
|
RU2158001C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| US 5280294 А, 18.01.1994 | |||
| US 4916455, 10.04.1990 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

